Электромеханические характеристики тяговых двигателей
3. Тяговые электрические двигатели, их особенности и конструкция
Какому двигателю отдать предпочтение?
В настоящее время наибольшее распространение получили электрические двигатели двух видов: переменного тока — трехфазные асинхронные и постоянного тока — коллекторные с различными способами возбуждения. Какой же из них лучше использовать на электровозе?
Двигатели, которые могут быть использованы как тяговые, должны удовлетворять, как минимум, двум требованиям. Прежде всего необходимо иметь возможность регулировать в широких пределах их частоту вращения, а следовательно, и скорость движения поезда. Это позволяет машинисту устанавливать ту или иную скорость в зависимости от состояния пути, указаний путевых сигналов, временных ограничений скорости и других причин. Кроме того, необходимо также иметь возможность регулировать в широком диапазоне силу тяги (вращающий момент). Так, двигатели электровоза должны обеспечивать значительную силу тяги во время трогания поезда, его разгона, при преодолении крутых подъемов и т. п. и снижать ее в более легких условиях движения.
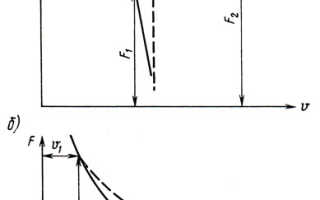
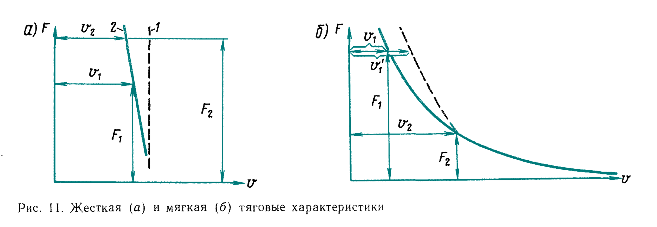
С точки зрения организации движения, казалось бы, желательно, чтобы поезда независимо от изменения сопротивления движению перемещались с постоянной скоростью или эта скорость снижалась бы незначительно. В этом случае зависимость между силой тяги F и скоростью движения υ представляла бы в прямоугольных осях координат вертикальную прямую линию 1, параллельную оси F, или слегка наклонную линию 2 (рис. 12, а). Зависимость между силой тяги, развиваемой двигателями локомотива, и скоростью его движения в науке о тяге поезда называют тяговой характеристикой и представляют ее графически, как показано на рис. 12, или в виде таблиц.
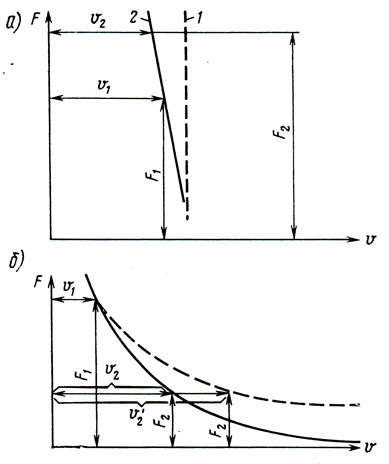
Рис. 12. Жесткая (а) и мягкая (б) тяговые характеристики
Изображенные на рис. 12, а тяговые характеристики являются жесткими. В случае жесткой характеристики мощность, потребляемая двигателями, например на крутых подъемах, возрастает пропорционально увеличению силы тяги (произведение υ1F1 значительно меньше υ2F2, рис. 12, а). Резкое увеличение потребляемой мощности приводит к необходимости повышения мощности — как самих двигателей, так и тяговых подстанций, увеличения сечения контактной подвески, что связано с затратами денежных средств и дефицитных материалов. Избежать этого можно, обеспечив характеристику двигателя, при которой с увеличением сопротивления движению поезда автоматически снижалась бы его скорость, т. е. так называемую мягкую характеристику (рис. 12, б). Она имеет вид кривой, называемой гиперболой. Двигатель с такой тяговой характеристикой работал бы при неизменной мощности (υ1F1 = υ2F2). Однако при движении тяжелых составов на крутых подъемах, когда необходима большая сила тяги, поезда перемещались бы с очень низкой скоростью, тем самым резко ограничивая пропускную способность участка железной дороги. Примерно такой характеристикой обладают тепловозы, так как мощность их тяговых двигателей ограничена мощностью дизеля. Это относится и к паровой тяге, при которой мощность ограничивается производительностью котла.
Мощность, развиваемая тяговыми двигателями электровоза, практически не ограничена мощностью источника энергии. Ведь электровоз черпает энергию через контактную сеть и тяговые подстанции от энергосистем, обычно обладающих мощностями, несоизмеримо большими мощности электровозов. Поэтому при создании тяговых двигателей электровозов стремятся получить характеристику, показанную на рис. 12, б штриховой линией. Электровоз, оборудованный двигателями с такой характеристикой, может развивать значительную силу тяги при сравнительно высокой скорости. Конечно, мощность, потребляемая тяговыми двигателями в условиях высоких скоростей, повышается (υ2‘F2 несколько больше υ2F2, но это не приводит к резким перегрузкам питающей системы.
Трехфазные асинхронные двигатели самые распространенные. Достоинства их трудно переоценить: простота устройства и обслуживания, высокая надежность, низкая стоимость, несложный пуск. Но, как известно, частота вращения асинхронного двигателя почти постоянна, не зависит от нагрузки; она определяется частотой подводимого тока и числом пар полюсов двигателя. Поэтому регулировать частоту вращения таких двигателей, а следовательно, и скорость движения поездов можно только изменением частоты питающего тока и числа пар полюсов, что трудно осуществить. Кроме того, как уже отмечалось выше, для питания таких двигателей требуется устраивать сложную контактную сеть. Поэтому асинхронные двигатели до недавнего времени почти не применяли на электровозах.
Благодаря развитию полупроводниковой техники оказалось возможным создать преобразователи однофазного переменного тока в переменный трехфазный и регулировать их частоту. Это позволило построить электровозы, на которых в качестве тяговых используются трехфазные асинхронные двигатели. Подробнее о таких электровозах будет рассказано ниже. Отметим, что абсолютно жесткой характеристикой (см. рис. 12, а) обладает синхронный двигатель.
Посмотрим, в какой степени отвечают требованиям, предъявляемым к тяговым двигателям, электрические машины постоянного тока. Напомним, что эти машины — генераторы и двигатели — различаются по способу их возбуждения.
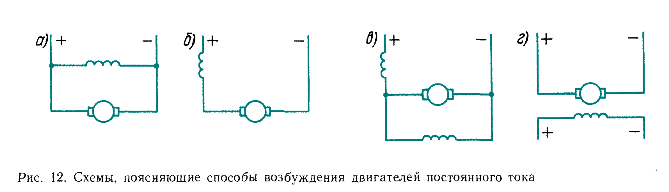
Обмотки возбуждения могут быть включены параллельно обмотке якоря (рис. 13, а) и последовательно с ней (рис. 13, б). Соответственно такие двигатели называют двигателями с параллельным возбуждением (устаревшее название — шунтовые) и последовательным (сериесные). Используют также двигатели, у которых имеются две обмотки возбуждения — параллельная и последовательная, т. е. смешанное возбуждение. Их так и называют: двигатели смешанного возбуждения. Если обмотки включены согласно, т. е. создаваемые ими магнитные потоки складываются (рис. 13, в), то такие двигатели называют двигателями согласного возбуждения (компаундные); если потоки вычитаются, то имеем двигатели встречного возбуждения (противокомпаундные). Применяют и независимое возбуждение: обмотка возбуждения питается от постороннего источника энергии (рис. 13, г).
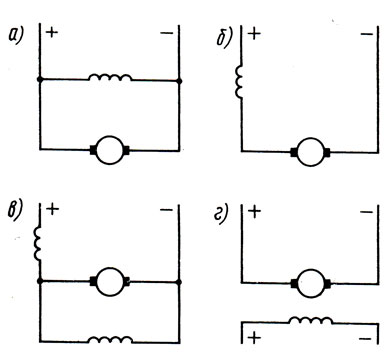
Рис. 13. Схемы, поясняющие способы возбуждения двигателей постоянного тока
Чтобы оценить возможности регулирования частоты вращения двигателя постоянного тока, напомним, что при вращении в магнитном поле проводников обмотки якоря двигателя в них индуктируется электродвижущая сила (э. д. с). Направление э. д. с. определяют, пользуясь известным правилом правой руки. Ток, проходящий по проводникам якоря от источника энергии, направлен навстречу индуктируемой э. д. с., и поэтому ее применительно к двигателям называют иногда противо- э. д. с. Следовательно, напряжение U, приложенное к якорю двигателя, в любое мгновение должно быть больше индуктируемой в его обмотке суммарной э. д. с. Е. На основании закона равновесия электродвижущих сил можно написать:
где I — ток якоря; r — сопротивление обмотки якоря.
Значение э. д. с. Е пропорционально значениям магнитного потока и скорости, с которой проводники пересекают магнитные силовые линии, т. е.

где с — коэффициент, учитывающий параметры двигателя (его размеры, число пар полюсов, число проводников обмотки якоря и т. п.) и размерности величин, входящих в формулу; Ф — магнитный поток; n — частота вращения якоря двигателя.


Формула (2) определяет зависимость между частотой вращения и током якоря при постоянном значении приложенного напряжения. Сопротивление обмотки якоря невелико и составляет обычно несколько сотых долей ома. Поэтому без ощутимой ошибки можно считать, что n ≈ U: (сФ). Следовательно, частоту вращения двигателей постоянного тока можно регулировать, изменяя подводимое к ним напряжение (прямая пропорциональность) или магнитный поток возбуждения (обратная пропорциональность). Оба способа регулирования частоты вращения применяются на электровозах.
Установим, как зависит вращающий момент от тока якоря. Если подключить проводники обмотки якоря двигателя к электрической сети, то проходящий по ним ток, взаимодействуя с магнитным полем полюсов, создаст силы, действующие на каждый проводник с током. В результате совместного действия этих сил создается вращающий момент М, пропорциональный току якоря и магнитному потоку полюсов Ф, т. е.
где см — коэффициент, который учитывает размерность величин, входящих в формулу, число проводников обмотки якоря и другие параметры двигателя.
Из формулы (3) видно, что вращающий момент не зависит от подведенного напряжения.
Чтобы построить тяговую характеристику двигателя постоянного тока, необходимо установить, как изменяются частота вращения n и момент М в зависимости от тока при разных способах возбуждения двигателей. С увеличением нагрузки двигателей, например в случае преодоления подъема при неизменном напряжении U, будет возрастать и ток якоря, так как, чтобы преодолеть дополнительную нагрузку, двигатель должен развивать большую силу тяги, а следовательно, и мощность (как известно, Р = UI).
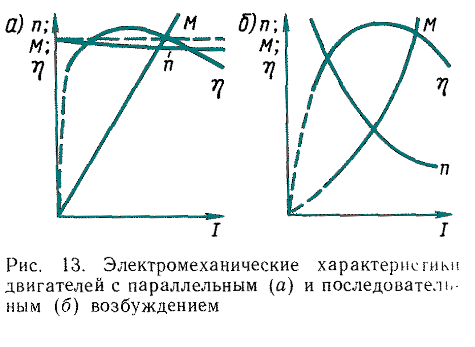
Для двигателей с параллельным возбуждением можно считать, что ток возбуждения не изменяется с изменением нагрузки. Следовательно, не изменяется и магнитный поток * . Так как сопротивление r обмотки, как уже отмечалось, невелико, то в соответствии с формулой (1) будет незначительно, возрастать произведение Ir при постоянных U и Ф. Это значит, что частота вращения двигателя с параллельным возбуждением при увеличении нагрузки несколько уменьшается (рис. 14, а), а вращающий момент возрастает пропорционально увеличению тока, что графически изображается прямой линией, проходящей через начало координат.
* ( В действительности магнитный поток немного уменьшается вследствие размагничивающего действия реакции якоря.)
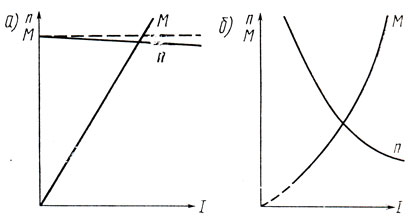
Рис. 14. Электромеханические характеристики двигателей с параллельным (а) и последовательным (б) возбуждением
Примерно такие же характеристики будут иметь двигатели с независимым возбуждением, если не изменяется ток возбуждения.
Рассмотрим те же характеристики для двигателя с последовательным возбуждением (см. рис. 13, б). У такого двигателя магнитный поток зависит от нагрузки, так как по обмотке возбуждения проходит ток якоря. Частота вращения якоря, как видно из формулы (2), обратно пропорциональна потоку и при увеличении тока якоря I, а значит, и магнитного потока Ф резко уменьшается (рис. 14, б). Вращающий момент двигателя, наоборот, резко возрастает, так как одновременно увеличиваются ток якоря и зависящий от него магнитный поток возбуждения.
В случае небольших нагрузок магнитный поток возрастает пропорционально току, а вращающий момент, как это следует из формулы (3), пропорционально квадрату тока якоря. Если нагрузка увеличится значительно, ток двигателя возрастет до такой степени, что наступит насыщение его магнитной системы. Это приведет к тому, что частота вращения двигателя будет снижаться уже в меньшей степени. Но тогда начнет более интенсивно возрастать ток, а значит, и потребляемая из сети мощность. При этом скорость движения поезда несколько стабилизируется.
Зависимость частоты вращения n, а также зависимость вращающего момента М от тока якоря I и коэффициента полезного действия η называют электромеханическими характеристиками на валу тягового двигателя при неизменном напряжении U, подводимом к тяговому двигателю.
По электромеханическим характеристикам двигателя можно построить его тяговую характеристику. Для этого берут ряд значений тока и определяют по характеристикам соответствующие им частоту вращения и вращающий момент двигателя. По частоте вращения несложно подсчитать скорость движения поезда, так как известны передаточное число редуктора и диаметр круга катания колесной пары. Зная вращающий момент, подсчитывают силу тяги, развиваемую одной, а затем и всеми колесными парами электровоза. По полученным данным строят тяговую характеристику. Но и без этого построения очевидно, что двигатель с последовательным возбуждением имеет мягкую характеристику. Поэтому на электрических железных дорогах в качестве тяговых в подавляющем большинстве случаев используют двигатели постоянного тока с последовательным возбуждением.
Тяговые двигатели последовательного возбуждения имеют и другие преимущества по сравнению с двигателями параллельного возбуждения. Так, при постройке тяговых двигателей устанавливают допуски на точность изготовления, на химический состав материалов для двигателей и т. п. Создать двигатели с абсолютно одинаковыми характеристиками практически невозможно. Вследствие различия характеристик тяговые двигатели, установленные на одном электровозе, при работе воспринимают неравные нагрузки. Более равномерно нагрузки распределяются между тяговыми двигателями последовательного возбуждения, из-за того что они имеют мягкую тяговую характеристику.
Таким образом, мы отметили ряд преимуществ, обеспечиваемых мягкой характеристикой двигателя последовательного возбуждения. С еще одним важным преимуществом такой характеристики мы познакомимся при описании пуска тяговых двигателей. Как видим, двигатели последовательного возбуждения обладают множеством положительных свойств. Но они имеют и весьма существенный недостаток — электровозы с двигателями последовательного возбуждения склонны к боксованию, иногда переходящему в разносное. Этот недостаток особенно резко проявился после того, когда масса поезда стала ограничиваться не мощностью тяговых двигателей, а расчетным коэффициентом сцепления. Жесткая характеристика в значительно большей мере способствует прекращению боксования, так как в этом случае сила тяги резко снижается даже при небольшом скольжении и имеется больше шансов на восстановление сцепления. К недостаткам тяговых двигателей последовательного возбуждения относится также то, что эти двигатели не могут автоматически переходить в режим электрического торможения.
Электромеханические характеристики тяговых двигателей
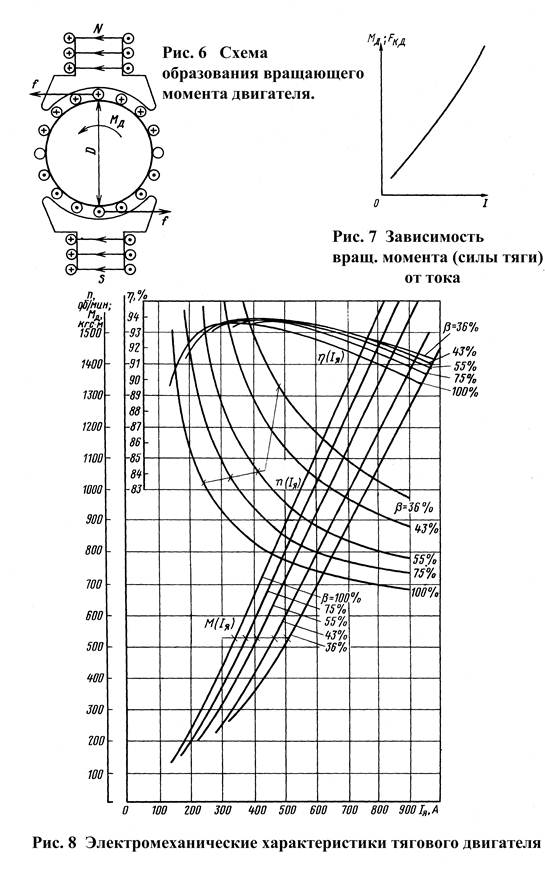
На всех серийных электровозах установлены тяговые двигатели постоянного тока с последовательным возбуждением. Под электромеханическими характеристиками понимают зависимость вращающего момента, частоты вращения якоря и коэффициента полезного действия (кпд) ТД от тока.
Полный вращающий момент двигателя складывается из вращающих моментов, созданных многими парами проводников, лежащих на якоре под разнополярными главными полюсами (рис.6). Совокупность пар сил, создаваемых всеми проводниками, называют вращающим моментом двигателя Мд.
Так как сила выталкивания f проводников якоря из магнитного поля полюсов зависит от тока в этих проводниках и магнитного потока полюсов Ф, то
Мд = см I Ф
Где: I – ток якоря
см – постоянный (для каждого типа двигателя) коэффициент, учитывающий
число полюсов, число проводников обмотки якоря и другие параметры
Как видно вращающий момент двигателя не зависит от напряжения на нем. Зависимость момента Мд от тока I приведены на рис.7 и 8. Поскольку магнитный поток Ф у двигателя последовательного возбуждения также зависит от тока, то кривая, соответствующая формуле Мд = см I Ф при больших значениях тока уходит вверх (вращающий момент резко возрастает) – это одно из наиболее ценных качеств двигателя с последовательным возбуждением. Кривая уходила бы вверх еще резче, ели бы при больших токах не наступало магнитного насыщения магнитопровода двигателя, вследствие чего с дальнейшим ростом тока магнитный поток возрастает слабее. Соотношение значений Fк и I называют электромеханической характеристикой силы тяги электровоза на ободах колес.
Рассмотрим зависимость частоты вращения якоря ТД от других факторов, которые могут изменяться по воле машиниста. Из курса предмета «Основы электротехники» известно соотношение
где: n – частота вращения якоря
Uк – напряжение, подведенное к двигателю
rд – сопротивление обмоток двигателя
см – постоянный (для каждого типа двигателя) коэффициент
Из формулы следует, что частоту вращения якоря ТД можно регулировать двумя способами: изменением напряжения и изменением магнитного потока полюсов Ф. Напряжение повышается изменением коэффициента трансформации путем переключения выводов вторичной (или первичной) обмотки трансформатора. Однако следует отметить, что в период пуска к двигателю должно быть подведено пониженное напряжение.
Практически к ТД в начале пуска подводится напряжение 18 – 50 В (в зависимости от серии электровоза). При таком напряжении ток, вращающий момент двигателей и сила тяги электровоза достаточны для трогания с места электровоза и небольшого числа головных вагонов поезда. Постепенно повышая напряжение на ТД (переход на более высокие позиции), машинист увеличивает силу тяги электровоза, что приводит к началу движения всего состава.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Большая Энциклопедия Нефти и Газа
Электромеханическая характеристика
Универсальные электромеханические характеристики используются для предварительных расчетов, связанных с выбором основных параметров электроподвижного состава, и основаны на подобии электромеханических характеристик однотипных двигателей. Они дают соотношение в процентах между током нагрузки, усилием тяги и скоростью, причем за 100 % принимаются значения этих величин для часового режима. [16]
Электромеханическая характеристика реле Р подобрана таким образом, что при среднем значении тока в обмотке реле ( около 2 ма) обе пары контактов Кг и Kz реле разомкнуты и ротор двигателя исполнительного механизма неподвижен. При изменении величины тока в ту или другую сторону замыкается верхняя или нижняя пара контактов, подается питание в одну из обмоток двигателя исполнительного механизма и регулирующий орган перемещается в соответствующем направлении. Через конденсатор С1 на эту же сетку подается положительное напряжение. Результирующее напряжение на сетке обеспечивает нормальный режим работы лампы, когда среднее значение тока, протекающего через обмотку реле, равно 2 ма. [17]
Электромеханические характеристики тяговых двигателей обычно даются для нормального напряжения и соответствуют параллельному соединению. [18]
Электромеханические характеристики реостатного торможения для сериесного двигателя показаны на фиг. [19]
Обычно электромеханические характеристики ТМ СВ даются для нескольких значений / п в. При необходимости характеристики для промежуточных значений In B строят, используя ближайшие большие / н в. [21]
Электромеханическими характеристиками называют кривые зависимости вращающего момента М на валу двигателя и скорости его вращения п от тока. Электромагнитные силы, вызывающие вращение якоря, прямо пропорциональны току и магнитному потоку машины. [22]
Результирующая электромеханическая характеристика , показанная сплошной линией, очевидно, легко может видоизменяться простым изменением длины катушки. Сила F3 при этом сохраняет достаточно большое значение при относительно больших перемещениях якоря. [23]
Различают электромеханические характеристики , отнесенные к валу тягового электродвигателя и к ободу движущих колес. [24]
Вид электромеханических характеристик ДПТ НВ соответствует кривой 2 на рис. 3.15. Как следует из (3.16) и (3.17) и зависимости Ф / ( /) на рис. 3.15, при / я — О, М — 0 теоретически со — — то. [26]
Построение электромеханических характеристик ДПТ ПВ рекомендуется вести с использованием кривых вида рис. 3.15 в следующей последовательности. [27]
Построение электромеханических характеристик тягового электродвигателя электровоза переменного тока аналогично построению этих характеристик для двигателя электровоза постоянного тока. Различие состоит лишь в том, что величина выпрямленного напряжения уменьшается с увеличением тока выпрямителя. Поэтому зависимость и ( 1) для каждой ступени регулирования необходимо строить с учетом наклона внешних характеристик выпрямителя. [28]
По электромеханическим характеристикам , отнесенным к ободу, может быть построена полная тяговая характеристика zf — f ( v), где 2 — число тяговых двигателей локомотива. [29]
Под электромеханическими характеристиками понимают зависимость вращающего момента, частоты вращения якоря и коэффициента полезного действия ( см. § 8) тягового двигателя от тока. [30]

КАКОМУ ДВИГАТЕЛЮ ОТДАТЬ ПРЕДПОЧТЕНИЕ?
Наибольшее распространение в промышленности получили электрические двигатели двух видов: переменного тока — трехфазные асинхронные и постоянного тока — коллекторные с различными способами возбуждения. Какой же из них лучше использовать на электровозе?
Двигатели, которые могут быть использованы в качестве тяговых на электровозе, должны удовлетворять как минимум двум требованиям. Прежде всего они должны допускать возможность регулирования в широких пределах частоты вращения. Это позволяет изменять скорость движения поезда. Кроме того, необходимо иметь возможность регулировать в широком диапазоне силу тяги, т. е. вращающий момент, развиваемый двигателем. Так, двигатели электровоза должны обеспечивать значительную силу тяги во время трогания поезда, его разгона, при преодолении крутых подъемов и т. п. и снижать ее при более легких условиях движения.
С точки зрения организации движения, казалось бы, желательно, чтобы поезда независимо от изменения сопротивления движению перемещались с постоянной скоростью или эта скорость снижалась бы незначительно. В этом случае зависимость между силой тяги F и скоростью движения и (рис. 11, а) представляла бы в прямоугольных осях координат вертикальную прямую линию 1, параллельную оси F, или слегка наклонную линию 2. Зависимость между силой тяги, развиваемой двигателями локомотива, и скоростью его движения называют тяговой характеристикой и представляют ее графически, как показано на рис. 11, или в виде таблиц.
Изображенные на рис. 11, (а) тяговые характеристики являются жесткими. В случае жесткой характеристики мощность, потребляемая двигателями и равная произведению силы тяги на скорость, например, на крутых подъемах, возрастает пропорционально увеличению силы тяги (произведение V1F1 значительно меньше V2F2, см. рис. 11, а). Резкое увеличение потребляемой мощности приводит к необходимости повышения мощности как самих двигателей, так и тяговых подстанций, увеличения площади сечения контактной подвески, что связано с затратами денежных средств и дефицитных материалов. Избежать этого можно, обеспечив характеристику двигателя, при которой с увеличением сопротивления движению поезда автоматически снижалась бы его скорость, т. е. так называемую мягкую характеристику (рис. 11, б). Она имеет вид кривой, называемой гиперболой. Двигатель с такой тяговой характеристикой работал бы при неизменной мощности (V1F1= V2F2). Однако при движении тяжелых составов на крутых подъемах, когда необходима большая сила тяги, поезда перемещались бы с очень низкой скоростью, тем самым резко ограничивая пропускную способность участка железной дороги. Примерно такой характеристикой обладают тепловозы, так как мощность их тяговых двигателей ограничена мощностью дизеля. Это относится и к паровой тяге, при которой мощность ограничивается производительностью котла.
Мощность, развиваемая тяговыми двигателями электровоза, практически не ограничена мощностью источника энергии. Ведь электровоз получает энергию через контактную сеть и тяговые подстанции от энергосистем, обычно обладающих мощностями, несоизмеримо большими мощности электровозов. Поэтому при создании электровозов стремятся получить характеристику, показанную на рис. 11, (б) штриховой линией. Электровоз, оборудованный двигателями с такой характеристикой, может развивать значительную силу тяги на крутых подъемах при сравнительно высокой скорости. Конечно, мощность, потребляемая тяговыми двигателями в условиях больших сил тяги, повышается (V1’F1 несколько больше V1F1), но это не приводит к резким перегрузкам питающей системы.
Трехфазные асинхронные двигатели самые распространенные. Достоинства их трудно переоценить: простота устройства и обслуживания, высокая надежность, низкая стоимость, несложный пуск. Однако, как известно, частота вращения асинхронного двигателя почти постоянна и мало зависит от нагрузки, она определяется частотой подводимого тока и числом пар полюсов двигателя. Поэтому регулировать частоту вращения таких двигателей, а следовательно, и скорость движения поездов можно только изменением частоты питающего тока и числа пар полюсов, что трудно осуществить. Кроме того, как уже отмечалось выше, для питания таких двигателей требуется устраивать сложную контактную сеть. Поэтому асинхронные двигатели до недавнего времени почти не применяли на электровозах.
Благодаря развитию полупроводниковой техники оказалось возможным создать преобразователи однофазного переменного тока в переменный трехфазный и регулировать их частоту. Это позволило построить электровозы, на которых в качестве тяговых используются трехфазные асинхронные двигатели. Подробнее о таких электровозах будет рассказано ниже. Отметим, что абсолютно жесткой характеристикой (см. рис. 11, а) обладает синхронный двигатель.
В какой же степени отвечают требованиям, предъявляемым к тяговым двигателям, электрические машины постоянного тока? Напомним, что эти машины — генераторы и двигатели — различаются по способу возбуждения.
Обмотка возбуждения может быть включена параллельно обмотке якоря (рис. 12, а) и последовательно с ней (рис. 12, б). Такие двигатели называют соответственно двигателями параллельного и последовательного возбуждения. Используют также двигатели, у которых имеются две обмотки возбуждения — параллельная и последовательная. Их называют двигателями смешанного возбуждения (рис. 12, в). Если обмотки возбуждения включены согласно, т. е. создаваемые ими магнитные потоки складываются, то такие двигатели называют двигателями согласного возбуждения ; если потоки вычитаются, то имеем двигатели встречного возбуждения . Применяют и независимое возбуждение : обмотка возбуждения питается от автономного (независимого) источника энергии (рис. 12, г).
Чтобы оценить возможности регулирования частоты вращения двигателя постоянного тока, напомним, что при вращении в магнитном поле проводников обмотки якоря двигателя в них возникает (индуцируется) электродвижущая сила (э. д. с). Направление ее определяют, пользуясь известным правилом правой руки. При этом ток, проходящий по проводникам якоря от источника энергии, направлен встречно индуцируемой э. д. с. Напряжение Uд, подведенное к двигателю, уравновешивается э. д. с., наводимой в обмотке якоря, и падением напряжения в обмотках двигателя:

где I — ток электродвигателя; rд — эквивалентное сопротивление обмоток двигателя.
Значение э. д. с. Е пропорционально магнитному потоку и частоте вращения, с которой проводники пересекают магнитные силовые линии, т. е.

где С1 — коэффициент, учитывающий конструктивные особенности двигателя (число пар полюсов, число активных проводников обмотки якоря и число параллельных ветвей обмотки якоря) и размерности величин, входящих в формулу; Ф — магнитный поток; n — частота вращения якоря двигателя. Тогда


Эта формула позволяет определить зависимость между частотой вращения и магнитным потоком при постоянном значении приложенного напряжения. Эквивалентное сопротивление обмоток двигателя невелико и составляет обычно менее одной десятой Ома. Поэтому без ощутимой ошибки можно считать, что n ? Uд : C1Ф.
Следовательно, частоту вращения двигателя постоянного тока можно регулировать, изменяя подводимое к нему напряжение (прямая пропорциональность) или магнитный поток возбуждения (обратная пропорциональность) . Оба способа регулирования частоты вращения применяются на электровозах.
Как зависит вращающий момент от тока якоря? Если подключить проводники обмотки якоря двигателя к электрической сети, то проходящий по ним ток, взаимодействуя с магнитным полем полюсов, создаст силы, действующие на каждый проводник с током. В результате совместного действия этих сил создается вращающий момент М, пропорциональный току якоря и магнитному потоку полюсов Ф, т. е.

где Cм — коэффициент, который учитывает размерность величин, входящих в формулу, число проводников обмотки якоря и другие параметры двигателя.
Из этой формулы видно, что вращающий момент не зависит от подведенного напряжения.
Чтобы построить тяговую характеристику двигателя постоянного тока, необходимо установить, как изменяются частота вращения n и момент М в зависимости от тока при разных способах возбуждения двигателей. С увеличением нагрузки двигателей, например в случае преодоления подъема, при неизменном напряжении Uд будет возрастать и ток якоря, так как, чтобы преодолеть дополнительную нагрузку, двигатель должен развивать большую силу тяги, а следовательно, и мощность (как известно, Р= UдI).
Для двигателей с параллельным возбуждением можно считать, что ток возбуждения не изменяется с изменением нагрузки. Следовательно, не изменяется и магнитный поток. Так как сопротивление rд обмотки якоря невелико, то в соответствии с формулой (3) будет незначительно возрастать произведение Irд при постоянных Uд и Ф. Это значит, что частота вращения двигателя с параллельным возбуждением при увеличении нагрузки несколько уменьшается (рис. 13, а), а вращающий момент возрастает пропорционально увеличению тока, что графически изображается прямой линией, проходящей через начало координат.
Примерно такие же характеристики будут иметь двигатели с независимым возбуждением, если не изменяется ток возбуждения.
Рассмотрим те же характеристики для двигателя с последовательным возбуждением (см. рис. 12, б). У такого двигателя магнитный поток зависит от нагрузки, так как по обмотке возбуждения проходит ток якоря. Частота вращения якоря, как видно из формулы (4), обратно пропорциональна потоку и при увеличении тока якоря I, а значит и магнитного потока Ф, резко уменьшается (рис. 13, б). Вращающий момент двигателя, наоборот, резко возрастает, так как одновременно увеличиваются ток якоря и зависящий от него магнитный поток возбуждения.
В случае небольших нагрузок магнитный поток возрастает пропорционально току, а вращающий момент, как это следует из формулы (5),— пропорционально квадрату тока якоря. Если нагрузка увеличивается значительно, ток двигателя возрастет до такой степени, что наступит насыщение его магнитной системы. Это приведет к тому, что частота вращения будет снижаться уже в меньшей степени. Но тогда начнет более интенсивно возрастать ток, а значит, и потребляемая из сети мощность. При этом скорость движения поезда несколько стабилизируется. Зависимости частоты вращения якоря n, вращающего момента М и коэффициента полезного действия ? от потребляемого двигателем тока I называют электромеханическими характеристиками на валу тягового двигателя при неизменном напряжении Uд , подводимом к тяговому двигателю, и постоянной температуре обмоток 115°С (по ГОСТ 2582—81).
По электромеханическим характеристикам двигателя можно построить его тяговую характеристику. Для этого берут ряд значений тока и определяют по характеристикам соответствующие им частоту вращения и вращающий момент. По частоте вращения двигателя несложно подсчитать скорость движения поезда, так как известны передаточное число i редуктора и диаметр D круга катания колесной пары:

Поскольку в теории тяги пользуются размерностью частоты вращения якоря тягового электродвигателя, выраженной в об/мин, а скорость движения поезда измеряют в км/ч, то формула (6) с учетом коэффициента согласования этих размерностей принимает вид
Зная вращающий момент на валу двигателя, а также потери при передаче момента от вала тягового двигателя к колесной паре, которые характеризуют к. п. д. передачи можно получить и силу тяги, развиваемую одной, а затем и всеми колесными парами электровоза:

где Nкд — число тяговых двигателей локомотива или движущих колесных пар.
По полученным данным строят тяговую характеристику (см. рис. 11).
На электрических железных дорогах в качестве тяговых в подавляющем большинстве случаев используют двигатели постоянного тока с последовательным возбуждением, обладающие мягкой тяговой характеристикой. Такие двигатели, как отмечалось выше, при больших нагрузках вследствие снижения скорости потребляют меньшую мощность из системы электроснабжения.
Тяговые двигатели последовательного возбуждения имеют и другие преимущества по сравнению с двигателями параллельного возбуждения. В частности, при постройке тяговых двигателей устанавливают допуски на точность изготовления, на химический состав материалов для двигателей и т. п. Создать двигатели с абсолютно одинаковыми характеристиками практически невозможно. Вследствие различия характеристик тяговые двигатели, установленные на одном электровозе, при работе воспринимают неравные нагрузки. Более равномерно нагрузки распределяются между двигателями последовательного возбуждения, так как они имеют мягкую тяговую характеристику.
Однако двигатели последовательного возбуждения имеют и весьма существенный недостаток — электровозы с такими двигателями склонны к боксованию, иногда переходящему в разносное. Этот недостаток особенно резко проявился после того, когда масса поезда стала ограничиваться расчетным коэффициентом сцепления. Жесткая характеристика в значительно большей мере способствует прекращению боксования, так как в этом случае сила тяги резко снижается даже при небольшом скольжении и имеется больше шансов на восстановление сцепления. К недостаткам тяговых двигателей последовательного возбуждения относится и то, что они не могут автоматически переходить в режим электрического торможения: для этого необходимо предварительно изменить способ возбуждения тягового двигателя.