Управление шаговым двигателем при помощи акселерометра
Управление шаговым двигателем при помощи акселерометра
Авторы: О.Е. Новикова, Д.П. Свиридов, Е.А. Бондаренко, Д.В. Заец, Д.Н. Мирошник. Источник: Перспективы развития электротехнических, электромеханических и энергосберегающих систем – 2016 / Материалы II международной научно-практической конференции «Инновационные перспективы донбасса» – Донецк, ДонНТУ – 2016, Том 2, с. 154-159.
Аннотация
О.Е. Новикова, Д.П. Свиридов, Е.А. Бондаренко, Д.В. Заец, Д.Н. Мирошник. Управление шаговым двигателем при помощи акселерометра. В работе разработана система отслеживания угла поворота и его последующего преобразования в угол поворота шагового двигателя. Заданием системы являются показания акселерометра, преобразованные в угол поворота.
Общие сведения
Шаговые двигатели, получившие свое развитие в начале 20 века, имеют высокую точность и являются одним из лучших вариантов для автоматизации систем, не требующих высокой динамики. Преимуществом шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Наиболее важной особенностью ШД является то, что на каждый импульс управления ротор поворачивается на фиксированный угол, значение которого в градусах называется шагом.
Работа по управлению ШД
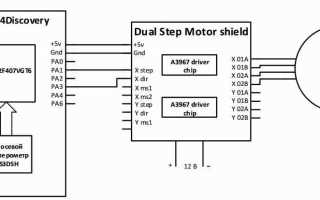
На кафедре «Электропривод и автоматизация промышленных установок» разработан стенд для отслеживания угла поворота акселерометра для задач стабилизации объекта управления. Его принципи- альная схема состоит из отладочной платы STM32F4Discovery, драйвера шагового двигателя Dual Step Motor sheild и шагового двигателя M42SP 6TG (рисунок 1) [1–4].

Рисунок 1 – Принципиальная схема устройства
Плата STM32F4Discover оснащена LIS3DSH [1], ST-MEMS датчиком движения, 3-осевым акселерометром с цифровым выходом (рисунок 2). Принцип работы акселерометра основан на измерении смещения инерционной массы относительно корпуса и преобразовании его в пропорциональный электрический сигнал. Акселерометр – устройство, которое измеряет проекцию кажущегося ускорения или определяет угол наклона устройства относительно поверхности Земли.

Рисунок 2 – Общий вид платы STM32F4 (выделено красным – 3-осевой акселерометр)
Драйвер (рисунок 3) имеет 2 независимых канала, и может управлять сразу двумя шаговыми двигателями. Он служит для формирования необходимых временных последовательностей сигналов и обеспечения необходимого тока в обмотках. С его помощью можно осуществлять полношаговый, полушаговый или микрошаговый режимы.
Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно- или полушаговом режимах. За счет меньшего угла шага под управлением контроллера достигается высшая точность при позиционировании. Также уменьшаются вибрации, реализуется практически бесшумная работа (и при очень низких частотах вращения), устраняется явление резонанса.

Рисунок 3 – Общий вид драйвера Dual step motor driver shield
- Напряжение питания логики 3,3В или 5 В;
- Напряжение питания силовой цепи 4,7–30 В;
- Максимальный ток силовой цепи 750 мА.
Управлять драйвером можно как через пины, так и через протокол связи UART.
Для управления одним драйвером (рисунок 4) необходимо всего 4 пина: Step, Dir, MS1 и MS2.
Step – делает один шаг двигателя.
Dir – задает направление движения.
MS1 и MS2 задают конфигурацию микро шагового режима.

Рисунок 4 – Схема драйвера Dual step motor driver shield
Микро шаговый режим можно настроить как с помочью джамперов непосредственно на плате, так и с помощью пинов (режим устанавливается отдельно для каждого драйвера, см. табл.1 ).
Таблица 1 – Переключение режимов работы драйвера
| MS1 | MS2 | Шаг |
|---|---|---|
| L | L | Полный |
| H | L | 1/2 |
| L | H | 1/4 |
| H | H | 1/8 |
Имеется подстроечный резистор Vref для настройки тока шагового двигателя (защита драйвера и двигателя от перегрева).
Система управления (рис.5) начинает работу при поступлении данных от акселерометра, которые предварительно пересчитываются в угол поворота (блок ANGLE). После сравнения с показаниями счетчика (порт counter_value), передаются через регулятор положения (CONTROLLER) на порты входа счетчика (COUNTER) up1down0 и move. В свою очередь вход up1down0 синхронизирует работу акселерометра и счетчика, с учетом коэффициентов, через управляемый ключ происходит инкремент или декремент счетчика. Также COUNTER задает направление движения двигателя (step motor direction). Блок min выполняет роль ограничителя счетчика по переполнению. Вход move регистрирует наличие движения акселерометра и контролирует количество необходимых импульсов, которые поступают на шаговый двигатель (step motor pulses). В роли формирователя импульсов выступает Pulse Generator.
Алгоритм управления программируется в отладочную плату STM32F4Discovery, к которой подключен драйвер шагового двигателя Dual step motor driver shield.
При изменении положения в заданной оси плата использует MEMS датчик движения, чтобы мигать светодиодами в соответствии с направлением и скоростью движения, то есть таким образом сигнализирует о реакции акселерометра на угловое перемещение (поворот).
После данный сигнал передается на ПК. Дальнейшее преобразование угла поворота акселерометра в угол поворота шагового двигателя осуществляется программно в среде моделирования Simulink MATLAB.

Рисунок 5 – Модель реализации системы управления
Данный алгоритм может быть применен в любых объектах требующих стабилизацию положения, например стедикам. Назначение стедикама – обеспечение плавного перемещения видеокамеры при динамической видеосъемке. В этом устройстве все угловые перемещения сводятся к минимуму настолько, что у зрителя при просмотре готовой видеоработы создается ощущение полета.
Недостатком данного алгоритма является недостаточная точность отработки, что требует дальнейших исследований.

Рисунок 6 – Общий вид системы управления «Акселерометр – шаговый двигатель»
Шаговые электродвигатели
 Сравнительно недавно термин «шаговый двигатель» был известен только узкому кругу инженеров-электриков. Теперь же шаговые двигатели получили почетное право называться лишь своими «инициалами» — ШД свидетельство широкого распространения электрических машин такого типа.
Сравнительно недавно термин «шаговый двигатель» был известен только узкому кругу инженеров-электриков. Теперь же шаговые двигатели получили почетное право называться лишь своими «инициалами» — ШД свидетельство широкого распространения электрических машин такого типа.
Воображение невольно подсказывает образ ступающей электрической машины с конечностями. Нет, это не робот, хотя шаговый двигатель может управлять одним из его суставов. Сама машина очень проста. Шаговый двигатель можно представить в виде нескольких электромагнитов с импульсными обмотками на неподвижной части (статоре) и якорем, который при переключении обмоток поворачивается или движется поступательно. Чтобы понять, как работает шаговый двигатель, вспомним принцип действия других электрических машин, например синхронных.
На статоре две или три обмотки. Они обтекаются плавно изменяющимися синусоидальными токами. Вместе с током пульсирует электромагнитное поле, создаваемое каждой обмоткой. Токи в обмотках нарастают и спадают не одновременно, а со строго определенным запаздыванием по времени; сами обмотки сдвинуты относительно друг друга и занимают равномерно чередующиеся участки цилиндрической поверхности.
В силу этого две или три пульсирующие волны поля (по числу обмоток) образуют одну бегущую волну. За каждый цикл полного изменения тока в обмотках результирующая волна обегает всю цилиндрическую поверхность расточки статора или ее часть. Поле равномерно вращается, увлекая за собой ротор. Токи в обмотках изменяются непрерывно, поэтому поле в рабочем зазоре и ротор непрерывно вращаются. Движение складывается из множества бесконечно малых перемещений.
А если в какой-то момент остановить изменение токов, заморозить их на достигнутом уровне, все равно каком, как в кинематографе, показывать какое-то время один и тот же кадр? Вместе с токами в обмотках застынет в каком-то положении волна бегущего поля, а вместе с ней остановится и ротор. Дадим смениться группе кадров и снова остановим последний из них, ротор повернется на определенный угол и снова замрет.
 Повторим это еще и еще. Машина послушно пошла шагами. Изменять токи в обмотках большими или малыми скачками, замораживая процесс на любом кадре, оказалось очень просто. Достаточно подавать на обмотки вместо непрерывно изменяющихся напряжений ступеньки прямоугольных импульсов. Каждый импульс — шаг, и его можно затянуть при желании до бесконечности, то есть остановить процесс и зафиксировать ротор. Пока импульсы чередуются медленно, двигатель отчетливо шагает.
Повторим это еще и еще. Машина послушно пошла шагами. Изменять токи в обмотках большими или малыми скачками, замораживая процесс на любом кадре, оказалось очень просто. Достаточно подавать на обмотки вместо непрерывно изменяющихся напряжений ступеньки прямоугольных импульсов. Каждый импульс — шаг, и его можно затянуть при желании до бесконечности, то есть остановить процесс и зафиксировать ротор. Пока импульсы чередуются медленно, двигатель отчетливо шагает.
Наш глаз способен различать несколько десятков шагов в секунду. Но вот кадры замелькали: сто, двести, тысяча, несколько десятков тысяч шагов в секунду. Не только наш глаз, но и чувствительные приборы уже не различают шагов, а видят просто вращение.
Шаговый двигатель бегает, как и раньше, правда, чуть покачиваясь, потому что каждый следующий шаг он делает строго в момент прихода очередной команды, а этот момент может быть не самым удобным. Внутренний автоматизм движений разрушен и заменен слепым повиновением команде. Зато в любой момент, на любом шаге мы можем приказать: «Замри!». Ротор качнется и замрет точно в указанном положении.
Попробуйте сдвинуть его насильственно с места, когда нет команды. Он будет решительно сопротивляться, и, если двигатель приличной комплекции, голыми руками вам его не взять. Электромагнитное поле не хочет расставаться с ротором ни в движении, ни в покое. Это оно держит его в своих цепких объятиях и заставляет повторять за собою все свои шаговые перемещения.
Между прочим, «сшивание» отдельных шагов, а если угодно, элементарных циклов или тактов движения в бесконечную последовательность, воспринимаемое нами как непрерывное вращение с чуть заметными пульсациями скорости, происходит в машине постоянного тока точно так же, как в двигателе внутреннего сгорания. Только там в роли неутомимых операторов выступают не щетки, а электрические свечи.
Поле шагает, потому что электронные ключи по командам извне то открывают, то запрещают доступ тока в обмотки. Шаговый двигатель снабжается электронным мозгом, и его возможности становятся исключительными, иногда необозримыми.
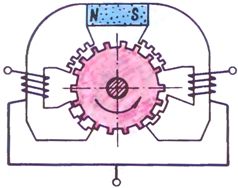
Принципиальная электрическая схема однофазного шагового двигателя с симметричной магнитной системой для часов, счетчиков и приборов промышленной автоматики.

Шаговый двигатель на станке с ЧПУ
Современная техника немыслима без фрезерных, токарных, электроэрозионных и многих других станков с цифровым управлением. Большая часть из них действует благодаря шаговым двигателям.
Шаговые двигатели обосновались в механизмах управления прокатных станов, прессов и других металлургических машин, стали одним из самых распространенных элементов автоматики, работают в электрических часах, таймерах и счетчиках, на кораблях, самолетах и искусственных спутниках Земли — везде, где требуется быстрое, точное и надежное исполнение воли человека.
С расширением рабочих профессий шагового двигателя возникло самостоятельное развитое направление — дискретный электропривод с шаговыми двигателями. У его истоков стояли ученые и инженеры проблемной лаборатории электромеханики МЭИ.
Первую победу шаговый двигатель одержал в 1957 году, когда на Всемирной выставке в Брюсселе, где были представлены различные интересные выставочные стенды, экспонировался первый в мире советский фрезерный станок с цифровым программным управлением. Этот экспонат был удостоен Большой золотой медали и открыл новую страницу в станкостроении.
ЦП Автоматизированные системы управления и промышленная безопасность
БК Автоматизированные системы управления и кибернетика



Управление ШД
Существует несколько способов управления фазами шагового двигателя.
Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена только одна фаза (рис а). Этот способ называют ”one phase on” full step или wave drive mode. Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у незапитанного двигателя. Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени иcпользуется 50% обмоток, а для униполярного – только 25%. Это означает, что в таком режиме не может быть получен полный момент.

Различные способы управления фазами шагового двигателя.
Второй способ — управление фазами с перекрытием: две фазы включены в одно и то же время. Его называют ”two-phase-on” full step или просто full step mode. При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора (рис. б) и обеспечивается примерно на 40% больший момент, чем в случае одной включенной фазы. Этот способ управления обеспечивает такой же угол шага, как и первый способ, но положение точек равновесия ротора смещено на пол-шага.
Третий способ является комбинацией первых двух и называется полушаговым режимом, ”one and two-phase-on” half step или просто half step mode, когда двигатель делает шаг в половину основного. Этот метод управления достаточно распространен, так как двигатель с меньшим шагом стоит дороже и очень заманчиво получить от 100-шагового двигателя 200 шагов на оборот. Каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две (рис. в). В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления. Кроме уменьшения размера шага этот способ управления позволяет частично избавиться от явления резонанса. Полушаговый режим обычно не позволяет получить полный момент, хотя наиболее совершенные драйверы реализуют модифицированный полушаговый режим, в котором двигатель обеспечивает практически полный момент, при этом рассеиваемая мощность не превышает номинальной.
Еще один способ управления называется микрошаговым режимом или micro stepping mode. При этом способе управления ток в фазах нужно менять небольшими шагами, обеспечивая таким образом дробление половинного шага на еще меньшие микрошаги. Когда одновременно включены две фазы, но их токи не равны, то положение равновесия ротора будет лежать не в середине шага, а в другом месте, определяемом соотношением токов фаз. Меняя это соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага. Кроме увеличения разрешающей способности, микрошаговый режим имеет и другие преимущества, которые будут описаны ниже. Вместе с тем, для реализации микрошагового режима требуются значительно более сложные драйверы, позволяющие задавать ток в обмотках с необходимой дискретностью. Полушаговый режим является частным случаем микрошагового режима, но он не требует формирования ступенчатого тока питания катушек, поэтому часто реализуется.
Для чего нам нужно знать эти способы? — от способа управления зависит, то для каких задач вы сможете его использовать, т.к. точность будет отличаться.
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции.
Если в процессе управления используется возбуждение только одной обмотки в любой момент времени, то ротор будет поворачиваться на фиксированный угол, который будет удерживаться пока внешний момент не превысит момента удержания двигателя в точке равновесия.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений.
Схема управления для биполярного шагового двигателя требует наличия мостовой схемы для каждой обмотки. Эта схема позволит независимо менять полярность напряжения на каждой обмотке.
На рисунке 3 показана последовательность управления для режима с единичным шагом.

На рисунке 4 показана последовательность для полушагового управления.

Максимальная скорость движения определяется исходя из физических возможностей шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро%аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора (К). Результирующий угол соответствует числу переключений коммутатора, а частота вращения двигателя соответствует частоте переключений электронного коммутатора.
Описанное выше, как раз то как вы должны управлять своим ШД. Управление ШД — это послание управляющего сигнала(+) в определенной последовательности на каждую из его обмоток.
Как же посылать эти сигналы? :На самом деле все проще чем кажется. Существует множество схем управления, рассмотрим самые простые варианты.
Управление делится на два типа: 1. Ручное. 2. Автоматическое.
При этом надо отметить, что автоматическое — это выполнение алгоритма действий без участия человека.
Теперь рассмотрим, что же необходимо для управления ШД:
1. Контроллер.
2. Драйвер ШД.
3. Силовой мост
Тут тоже надо подметить, что бывают управляющие Контроллеры с интегрированными силовыми мостами .
Принцип управления прост: Контроллер подает сигнал на драйвер, драйвер подает очередность сигналов на силовой мост, а мост подает сигнал на обмотки ШД.
Рассмотрим две проверенные мной схемы, которые очень просты и легки:
1. Дешевая, простая, но для нее нам понадобятся детальки и умение паять.
Детальки: Управляющий контроллер L297, Силовой мост L298N(l293 — выбор зависит от тока) , и l6210(ее можно заменить диодами), набор сопротивлений и конденсаторов.

- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INH1 и INH2, а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INH1/INH2будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298, подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
2. Это не требует пайки, но дорого.
Детальки: Freeduino Nano v5 , Драйвер шаговых двигателей EasyDriver V3, Макетная плата WB-102 с набором джамперов.
покупаем все это. и тупо собираем на макетной плате) .
Проблем быть не должно.. на всякий распишу, что где такое:
В версии Freeduino Nano v5 предусмотрены даже такие полезные особенности полноразмерных версий, как джампер отключения программного сброса и самовосстанавливающийся предохранитель по питанию USB (у прочих Nano модификаций в случае короткого замыкания перегорает диод Шоттки).

В силу столь радикального уменьшения размеров изменены все внешние разъемы: для связи с ПК используется mini-USB, интерфейсные гнезда заменены на штыревые разъемы со стандартным шагом 2,54 мм, что позволяет установить микроконтроллер в макетную плату или DIP-панель.
Несмотря на то, что непосредственно состыковать Freeduino Nano и дополнительный модуль, вроде Ethernet Shield не получится, совместимость остается – Вам потребуется только правильно соединить выводы Freeduino Nano и дополнительного модуля в соответствии с принципиальными схемами.
Модуль также может поставляться без смонтированных штыревых разъемов — для таких вариантов применения, где удобнее просто подпаять необходимые проводники.
Технические характеристики
* Миниатюрный размер: 18×43 мм
* Микроконтроллер: ATmega328
* Цифровые порты ввода/вывода: 14 портов (из них 6 с ШИМ-сигналом)
* Аналоговые порты ввода: 8 портов
* ППЗУ (Flash Memory): 32 К (из них 2 К используются загрузчиком)
* ОЗУ (SRAM): 2 Кбайт
* ПЗУ (EEPROM): 1024 байт
* Тактовая частота: 16 МГц
* Интерфейс с ПК: USB (разъем Mini-USB)
* Питание от USB, либо от внешнего источника, выбор автоматически
EasyDriver способен управлять до 750mA на фазу би-полярнымм шаговым двигателем. Он использует 8-шаговый микрошаговый режим (8 step microstepping mode). (Таким образом, если ваш мотор делает 200 полных шагов на оборот, используя EasyDriver вы получите 1600 шагов на оборот). Это chopper microstepping контроллер, построенный на чипе Allegro A3967. Полные технические характеристики можно найти в даташите к A3967.
Система управления шаговым двигателем
преподаватель, Донской государственный технический университет.
344000, Россия, Ростовская область, г. Ростов-на-Дону, Гагарина, 1
Gubanova Aleksandra Anatol’evna
Lecturer at Don State Technical University.
344000, Russia, Rostovskaya oblast’, g. Rostov-Na-Donu, Gagarina, 1
344000, Россия, Ростовская область, г. Ростов-на-Дону, Гагарина, 1
Guzarevich Aleksandra Sergeevna
344000, Russia, Rostovskaya oblast’, g. Rostov-na-Donu, Gagarina, 1
344000, Россия, Ростовская область, г. Ростов-на-Дону, Гагарина, 1
Taridonov Nikita Evgen’evich
344000, Russia, Rostovskaya oblast’, g. Rostov-na-Donu, Gagarina, 1
Просмотров статьи: 6983 c 5.5.2015
Дата направления статьи в редакцию:
Дата публикации:
Аннотация: В настоящее время хорошей альтернативой микроприводам, состоящим из быстроходного двигателя с обратной связью и механического редуктора, является шаговый электропривод, ставший уже традиционным исполнительным устройством многих электронных приборов и систем. Предметом исследования в данной работе является шаговый двигатель. В данной работе объектом управления (ОУ) является двухкоординатный транспортный модуль на основе линейных шаговых двигателей (ЛШД), который применяется для изготовления микросхем высокой степени интеграции. Для этой цели используется зондовая установка, включающая в себя двухкоординатный транспортный модуль. В данной работе при проектировании системы применима методика управления режимом полного шага для линейного шагового двигателя. Система управления шаговым двигателем предназначена для формирования сигналов на обмотках шагового двигателя и управления скоростью вращения его вала и контроля количества шагов поворота. В ходе работы были разработаны схемы структурная и электрическая принципиальная, разработан алгоритм управления системой. Разработанная система отличается малыми габаритными размерами, низкой потребляемой мощностью, широкими функциональными возможностями. В устройстве используется современная, широкодоступная, дешевая элементная база.
Ключевые слова: шаговый линейный двигатель, драйвер управления, интерфейс управления, контроллер, электропривод, датчик импульсов, обратная связь, скорость вращения, источник питания, датчик положения
Abstract: At present, a stepper motor drive which has already become a traditional executive device for many electronic devices and systems is a good alternative to microdrives consisting of a high-speed motor with feedback and a mechanical gearbox. The subject of study of this article is a stepper motor. In this paper, the control object (OS) is a two-coordinate transport module based on linear stepper motors (LSD) which is used for the manufacture of high integration chips. For this purpose, a probe that includes a two-coordinate transport module is used. In this article, the technique of controlling the full-step mode was used for a linear stepper motor when designing the system. The stepper motor control system is designed to generate signals on the stepper motor windings and control the rotation speed of its shaft as well as to control the number of pivot steps. In the course of the study, the author developed structural and electric schemes and an algorithm for controlling the system. The developed system is characterized by small overall dimensions, low power consumption, wide functionality. The device uses a modern, widely available, low-cost element base.
Feedback, pulse sensor, electric drive, controller, management interface, management driver, linear stepper motor, rotational speed, source of power, position sensor
Шаговый привод как недорогая альтернатива наилучшим образом подходит для автоматизации отдельных узлов, модулей и систем, где не требуется высокая динамика [1] . Задачи, решаемые при помощи шагового привода, разнообразны. Шаговые двигатели устанавливаются в устройствах и механизмах, требующих высокой надежности и точности: когда требуется позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением [2] .
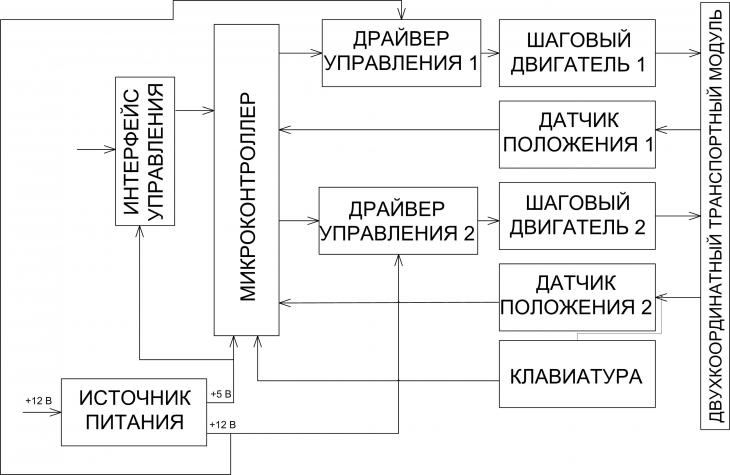
Рисунок 1- Структурная схема системы управления шаговым двигателем
Структурно схема состоит из следующих блоков:
— шагового двигателя 1 и 2;
— драйвера управления 1 и 2;
— датчика положения 1 и 2;
-импульсного источника питания;
Принцип работы системы более подробно рассмотрим на примере схемы электрической принципиальной, представленной на рисунке 2.
Управляющие команды двигателем могут поступать по одному из двух интерфейсов связи либо по USB, либо по UART, при этом выбор между одним из этих интерфейсов осуществляется переключением соответствующих четырех микропереключателей, так же установленных на плате.
Модуль управления реализован на микроконтроллере AVR ATMega48, совмещенный с драйвером L6205, позволяющим управлять приводом, как на базе шагового двигателя, так и двигателя постоянного тока. Контроллер работает с тактовой частотой 10МГц, с напряжением питания +5В. USB интерфейс реализован на базе преобразователя FTDI FT232R, позволяющего выполнить быстрое сопряжение стандартных UART и USB интерфейсов. Для отслеживание начального (нулевого) положения вала двигателя на плате установлен оптический щелевой датчик нуль-метки, производства компании Honeywell HOA08. Этот датчик позволяет однозначно определить начальное положение вала двигателя при новой подаче напряжения питания или сброса программы микроконтроллера. Стабильное напряжение питания микроконтроллера поддерживает импульсный понижающий DC-DC преобразователь LM2594M.
Модуль подключается к стандартному USB порту персонального компьютера, через кабель с ответным разъемом miniUSB, или по последовательному интерфейсу UART к другой микропроцессорной системе, при этом уровень сигналов составляет +5В. Для программирования микроконтроллера предусмотрен интерфейс ISP, с контакными площадками для подключения стандартного программатора AVR. Стоит так же отметить то, что для отображения текущего режима работы или индикации ошибки на модуле установлен светодиод, подключенный непосредственно к контроллеру. Типовое напряжение питания системы управления +12В , при этом минимальные его уровень составляет чуть более 8 В и ограничен 20В.
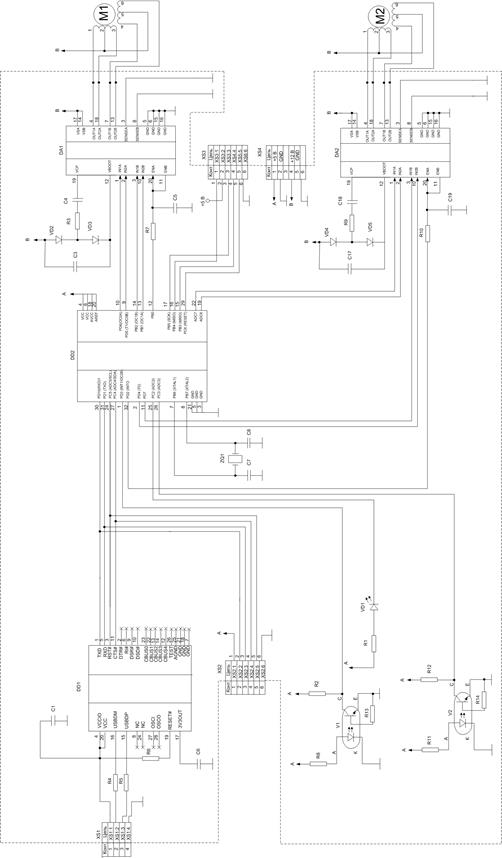
Рисунок 2 — Схема электрическая принципиальная системы управления шаговым двигателем
Алгоритм основной программы (рисунок 3) выполняет управление скоростью вращения вала шагового двигателя и контролирует количество шагов поворота. Данный алгоритм идентичен для двигателя 1 и двигателя 2.
Принцип работы алгоритма приведен ниже.
1. Начало работы
2. Установление ШД в нулевом положении
3. Ожидание данных частоты вращения ω и скорости импульсов С от разъема miniUSB.
4. Цикл «Новые данные?» (в этом цикле если приходят новые данные, то программа переходит к следующему блоку. Если чтение данных не началось, то происходит возврат к блоку «Ожидание данных частоты вращения ω и скорости импульсов С»)
5. Пересчет частоты вращения ω в частоту импульсов.
6. Формирование управляющих импульсов (в этом блоке происходит непосредственное включение ШД)
7. Считывание данных с датчика импульсов обратной связи.
8. Цикл «Скорость меньше требуемой?» (в этом цикле если значение скорости равно заданному, то двигатель работает в стационарном режиме и обновлений не требуется. Если скорость меньше требуемой, то в работу включается блок «Ускорение управляющих импульсов», т.е. двигатель ускоряется и достигает требуемой скорости. Если в цикле «Скорость больше требуемой?» условие выполняется, то двигатель замедляется, реверсируется и достигает требуемой скорости).
9. Цикл «Количество импульсов достигло требуемого?» (если данное условие не выполняется, то сигнал поступает на блок «Считывание данных с датчика импульсов обратной связи» до тех пор, пока количество импульсов не будет соответствовать требуемому значению. Если условие цикла выполняется, то происходит переход на следующий блок).
10. Остановка ШД (информация с данного блока по циклу возвращается к блоку «Ожидание данных частоты вращения ω и скорости импульсов С от разъема miniUSB» и работа системы возобновляется заново).
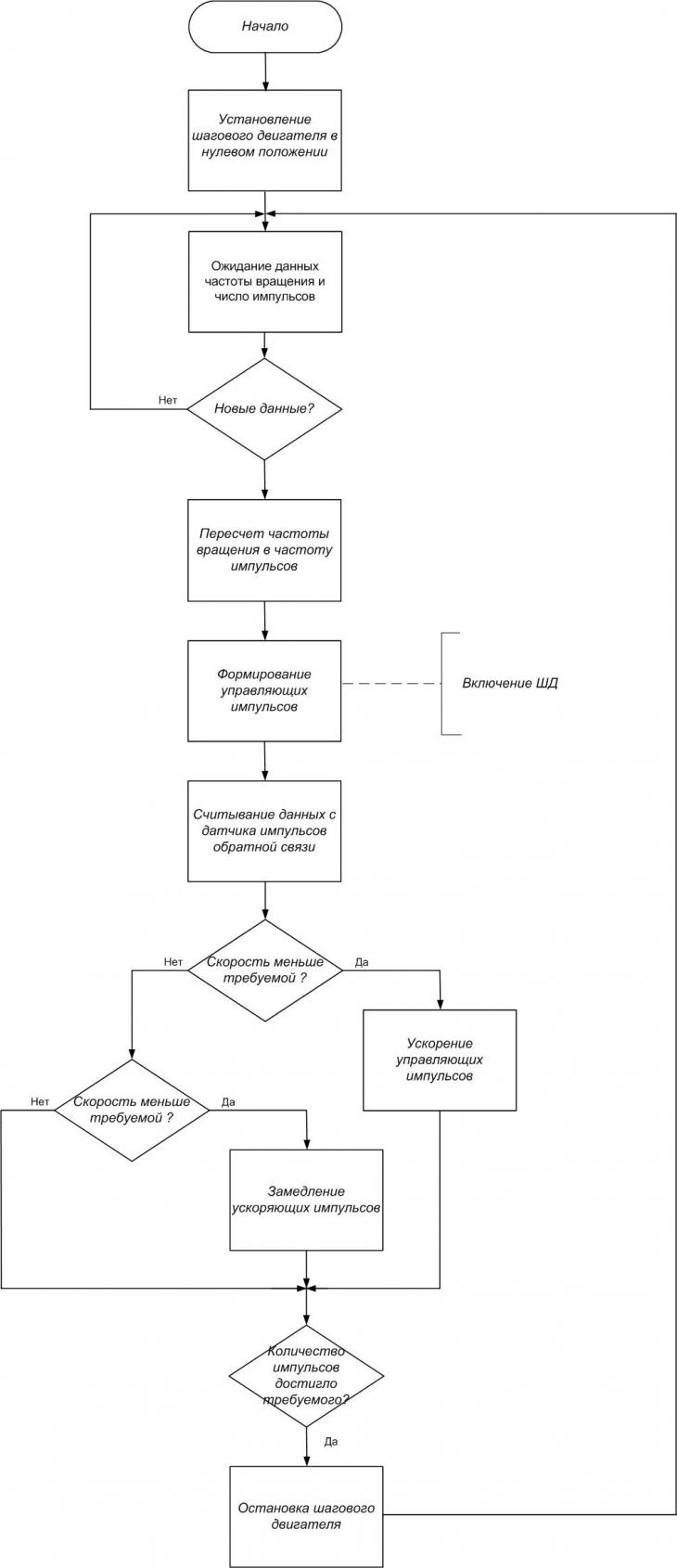
Рисунок 3- Алгоритм работы системы управления шаговым двигателем
Таким образом, в данной работе была разработана система управления шаговым двигателем на основе современной электронной базы. Разрабатываемая система по технической реализации должна осуществлять управление шаговым двигателем, обеспечивать скоростью вращения его вала и контролировать количество шагов поворота.
Просто выделите и скопируйте ссылку на эту статью в буфер обмена. Вы можете также попробовать найти похожие статьи