
Серводвигатель шаговый 57HSE2N-D25 (с энкодером)
Серводвигатель шаговый 57HSE2N-D25 (с энкодером)











- На складе Много
- Вес: 0 кг.
- Описание
- Комментарии
Шаговый двигатель 57HSE2N-D25 с энкодером. Nema 23 фланец 57 х 57 мм, длина корпуса — 99 мм.
Характеристики шагового двигателя 57HSE2N-D25:
Момент удержания 2.0 Нм,
Ток фазы 4.2 А,
Шаг 1.8 град.
Шаговый двигатель 57HSE2N-D25 с энкодером применяется в узлах линейного перемещения и механизмах систем с ЧПУ, в приводах осей фрезерных, токарных, гравировальных, лазерных, плазменных станках.
Шаговый двигатель 57HSE2N-D25 совместно со специальным драйвером HBS57 образуют шаговый сервопривод. Наличие энкодера на валу избавляет от главного недостатка шаговых двигателей — это пропуска шагов при работе.
Чертеж, технические характеристики и схема подключения шагового двигателя 57HSE2N-D25: СКАЧАТЬ
Подключение энкодера к частотному преобразователю
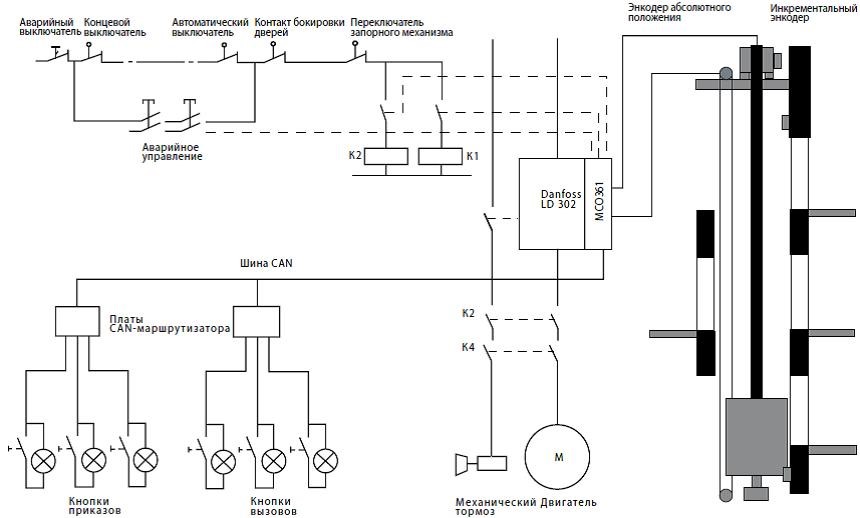
В станках, кранах, лифтовых приводах, промышленных роботизированных системах требуется очень точное позиционирование вала и регулирование частоты его вращения. Использование частотных преобразователей с векторным управлением с обратной связью по скорости позволяет решить эту задачу.
Для претенциозного регулирования скорости и позиционирования вала двигателя в состав электропривода включаются энкодеры. Использование частотно-регулируемого привода с датчиками скорости и положения позволяет заменить дорогостоящие сервоприводы.
Виды энкодеров
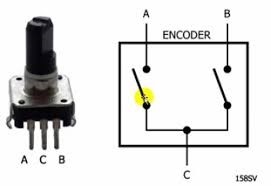
Энкодер – устройство для преобразования угла поворота или скорости вращения в электрический сигнал. По выходному сигналу различают:
- Инкрементальные энкодеры. Принцип действия этих устройств основан на подсчете количества импульсов, которое пропорционально повороту или частоте вращения вала. При использовании этих устройств необходимо задать нулевые точки для привязки датчика к конкретной системе отсчета.
- Абсолютные энкодеры. Такое устройства не требуют задания референтных точек. Абсолютные датчики выдают данные о текущем положении вала без интерпретации количества импульсов.
По принципу действия различают оптические и магнитные энкодеры (датчики Холла).
Состав электропривода на базе частотного преобразователя с точным позиционированием
Привод механизмов с точным позиционированием содержит:
Современные частотные преобразователи для оборудования с претенциозным регулированием положения рабочих органов или частоты вращения имеют функцию IMC, которая позволяет обойтись без сопрягающей платы и контроллера.
Как построить систему позиционирования
При построении системы позиционирования необходимо решить следующие задачи:
- Определить характер перемещения оси (абсолютный или относительный). При относительном перемещении за нулевую точку принимается положение вала при включении оборудования. При абсолютном перемещении при загрузке системы должны определяться абсолютные координаты вала относительно заданных осей координат.
- Подобрать энкодер. Эти элементы выбирают по количеству импульсов или бит за один оборот, типу и количеству выходов, габаритов корпуса, степени защиты IP, диаметру и типу вала.
- Подобрать частотный преобразователь и контроллер. Эти устройства должны иметь функции реверсивного счетчика (для работы с импульсным энкодером), определения координат оси при включении оборудования, аналоговые и цифровые выходы. Для управления шаговым двигателем могут понадобиться частотные входы “шаг/направление” и “по часовой стрелке/против часовой стрелки”.
Установка, подключение и тестирование энкодеров
Энкодер выбирают, исходя из требований к системе и параметров контроллера и частотного преобразователя. Самым важным критерием выбора этого оборудования является разрешение или количество импульсов, генерируемых за один оборот. Чем больше импульсов передает устройство на котроллер или частотный преобразователь, тем выше точность позиционирования положения вала при низкой скорости. Для точного регулирования при низкой частоте вращения необходимо не менее 20 импульсов на один период квантования контроллера.
При высокой скорости вращения ротора, следует выбрать устройство с разрешением, не превышающем максимальную входную частоту реверсивного счетчика частотного преобразователя или контроллера.
Энкодер крепится к валу двигателя, редуктора или другого передаточного устройства. При его установке важно обеспечить жесткое соединение. Скольжение и люфт снижают точность позиционирования и регулирования.
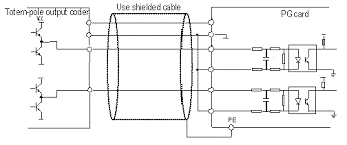
Запрещается запитывать знкодер от общей шины питания цепи управления. Для этих устройств необходимо предусмотреть отдельный источник стабилизированного напряжения. Интерфейсы Danfoss для подключения энкодеров имеют встроенные источники питания.
Соединение датчика скорости и положения необходимо выполнить экранированными кабелями рекомендуемой производителем марки.
При наладке привода ПК, где установлено соответствующее ПО, соединяют с интегрируемым или внешним контроллером. Далее открывают соответствующий раздел в меню котроллера и частотного преобразователя. Затем определяют тип энкодера, вводят его параметры.
Специализированные частотные преобразователи с интегрируемым контроллером движения имеют функции тестирования датчиков. Предусмотрены разные программы испытаний для ведущего и ведомого энкодеров в системе следящего привода. Программа испытаний:
- Автоматически определяет тип и разрешение датчика.
- Выполняет расчет времени замера ПИД-регулятора.
- Проверяет тип перемещения и выбор времени подсчета количества импульсов.
- Рассчитывает коэффициент прямой связи.
Если энкодер не работает, следует проверить качество контактных соединений. Если подсчет импульсов инкрементального датчика осуществляется в обратную сторону, необходимо поменять кабели, подключенные к каналам A и B и A/ и B/.
Преимущества специализированных преобразователей частоты
При использовании специализированных частотников и интегрируемых и внешних котроллеров, отпадет необходимость производить измерения и расчеты вручную. Эти устройства комплектуют программным обеспечением, позволяющим нивелировать дребезг контактов энкодеров, а также избавляет от необходимости писать программы самостоятельно.
Частотно-регулируемый привод способен выполнять следующие базовые функции:
- Определения абсолютной координаты для импульсного энкодера (Home).
- Настройки передаточных отношений и смещений в режиме On-line.
- Синхронизации скорости, положения по метке ведущего и ведомого привода в следящей системе регулирования.
- Приема и передачи данных по поддерживаемым протоколам связи.
- Абсолютного и относительного позиционирования.
- Автоматического вычисления, сравнения данных от датчиков.
- Совместимости с различными типами энкодров, поддержка разных конфигураций системы управления.
- Отладки встроенных программ.
Программирование преобразователей частоты и контроллеров движения осуществляется при помощи ПО, разработанного производителем. Схемы подключения различных типов энкодеров представлены в паспорте электропривода.
Для построения систем точного позиционирования на базе частотных преобразователей и контроллеров Danfoss не требуется глубоких знаний сервотехнологии и навыков написания программ. Эти устройства разработаны по принципу “ все в одном”. Такие приводы широко используются для станков с ЧПУ, кранов, высокоточных дозаторов и другого промышленного оборудования.
- Все
- Тематические
- Персональные
- TOP
- Проекты и идеи
- Arduino,
- шаговый двигатель,
- энкодер
- 17 июля 2018, 10:44
- admin
- комментировать
- Проекты и идеи
- Arduino,
- ЧПУ,
- энкодер,
- редуктор,
- автоматизация
- 22 ноября 2015, 07:33
- admin
- 1
- Блог им. Ferum
3. Разработка алгоритма обработки информации
Магниты расположены на валу якоря коллекторного двигателя постоянного тока. Вал вращается с максимальной скоростью 90 об/сек по паспорту. Количество магнитов 6. На рисунке 4.1 показан график сигнала во времени, поступающий с датчиков Холла.
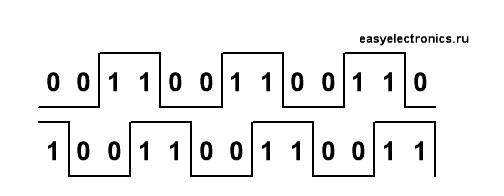
рисунок 4.1.
- кибервесна,
- энкодер,
- датчик Холла,
- алгоритм
- 30 мая 2013, 22:27
- Ferum
- комментировать
2. Энкодер. Разработка. Выбор компонентов
- Блог им. Ferum
2. Выбор электротехнических компонентов
2.1. Датчик Холла
Эффе́кт Хо́лла — явление возникновения поперечной разности потенциалов (называемой также холловским напряжением) при помещении проводника с постоянным током в магнитно поле (рисунок 2.1.).
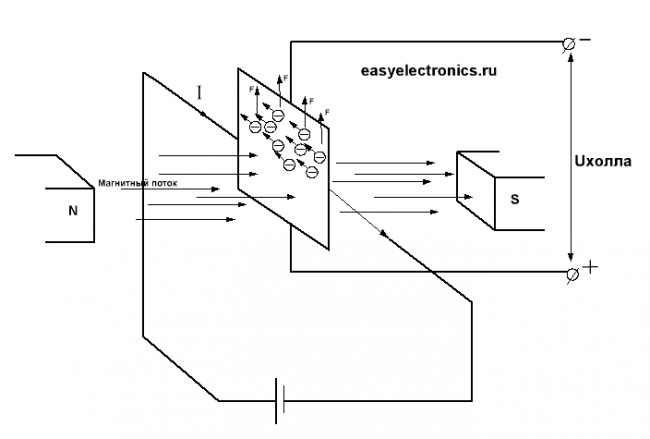
рисунок 2.1.
Схема подключения датчиков Холла (SA1, SA2) к микроконтроллеру (блок управления) изображена на рисунке 2.2.
- кибервесна,
- энкодер,
- датчик Холла
- 30 мая 2013, 22:19
- Ferum
- комментировать
1. Энкодер. Разработка.
- Блог им. Ferum
1. Введение. Исходные данные. Требования. Выбор типа датчика.
В данной статье описывается разработка встраиваемого энкодера для популярного среди мобильной робототехники моторедуктрора стеклоподъемника. Энкодер используется в мобильной платформе, поэтому разрабатывался в соответствии с исходными данными и техническими требованиями.
Стоимость одного энкодера (датчики Холла + магниты) составила 120руб.
Макет углового преобразователя собран и протестирован.
Моторедуктор стеклоподъемника: 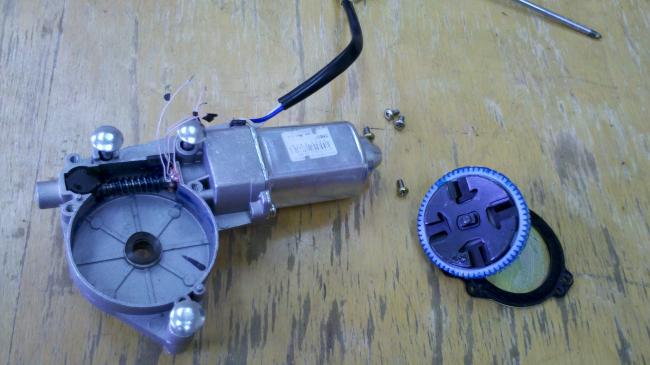
- кибервесна,
- энкодер,
- датчик Холла
- +1
- 30 мая 2013, 22:06
- Ferum
- комментировать
4.Энкодер. Разработка. Тестирование
- Блог им. Ferum
4. Тестирование
Программа выводит некоторые данные о системе позиционирования. Результаты тестирования приведены в таблице 5.1.
Таблица 5.1. 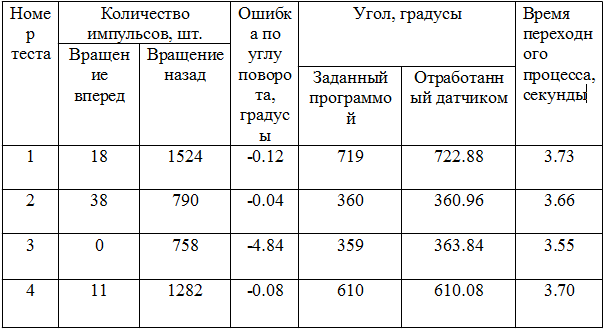
По результатам теста можно сказать
- кибервесна,
- энкодер,
- датчик Холла
- 28 мая 2013, 08:49
- Ferum
- комментировать
Забористые колёса
- Механика
 Давно уже мы ломали голову как порадовать общественность (и себя=) доступным и качественным движителем для роботов. Ничего не выходило — готовые компоненты — слишком дорого, заказывать производство — тоже не бюджетно выходило, самим делать из не предназначенных для этого деталей — получается жуткий колхоз.
Давно уже мы ломали голову как порадовать общественность (и себя=) доступным и качественным движителем для роботов. Ничего не выходило — готовые компоненты — слишком дорого, заказывать производство — тоже не бюджетно выходило, самим делать из не предназначенных для этого деталей — получается жуткий колхоз.
И вот после долгой и безуспешной борьбы с сервами , стеклоподъёмниками, шуруповёртами, колёсами от роликовых коньков, мебели и ещё чёрт знает от чего, когда мы уже сдались — закупили дорогие мотор-редукторы, крепёж и колёса… Совершенно неожидано, братья-коммунисты решили проблему с перевыполнением плана=)
Встречайте — колёсный узел от китайского робота-пылесоса!
Это законченный агрегат с 12 вольтовым мотором, металлическим редуктором, энкодером, с симпатичным колесом в цепкой резиновой покрышке, с подвеской и датчиком отрыва от пола! Причём всё это весьма приличного качества.
Ниже всё подробно, с разборкой и большим количеством фоток.
- колесо,
- энкодер,
- мотор-редуктор,
- пылесос
- +5
- 28 августа 2012, 16:50
- Zoltberg
- 24
Автономная навигация на Arduino. Энкодеры
- Блог им. lokki
Сегодня большая часть поста будет посвящена энкодерам на основе фотоинтеррапторов: 
Поехали!
- Arduino,
- кибервесна,
- фотоинтерраптор,
- энкодер
- +7
- 23 марта 2012, 18:51
- lokki
- 9
STM32: Урок 6.2 — Таймеры общего назначения и продвинутые
- ARM
 Продолжаем тему таймеров в STM32. В прошлый раз мы рассмотрели базовые таймеры, которые довольно-таки просты. Но сегодня мы поиграемся с более крутой игрушкой — таймерами общего назначения, которые на голову выше предыдущих.
Продолжаем тему таймеров в STM32. В прошлый раз мы рассмотрели базовые таймеры, которые довольно-таки просты. Но сегодня мы поиграемся с более крутой игрушкой — таймерами общего назначения, которые на голову выше предыдущих.
- STM32,
- ARM,
- Cortex-M3,
- микроконтроллеры,
- таймеры,
- ШИМ,
- PWM,
- энкодер
- +5
- 18 февраля 2012, 11:27
- burjui
- 39
- Страницы:
- 1
- 2
- последняя
Система управления шаговым двигателем
В современном мире всё большую роль играет автоматизация процессов. Для этого необходимо преобразовывать сигналы управления в механические движения. Одним из способов достижения данной цели является использование шаговых двигателей.
Шаговый двигатель — это электромеханичское устройство, которое преобразует электрические импульсы в дискретные механические перемещения.
Преимущества применения шаговых двигателей
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель;
- если обмотки запитаны, то двигатель в режиме остановки обеспечивает полный момент;
- хорошие шаговые двигатели обеспечивают точность 3-5% от величины шага, при этом ошибка не накапливается от шага к шагу;
- возможность быстрого старта/остановки/реверсирования;
- высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников;
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи;
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора;
- может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов.
Недостатки применения шаговых двигателей
- шаговым двигателем присуще явление резонанса;
- из-за работы без обратной связи возможна потеря контроля положения, поэтому рекомендуется дополнять системы управления шаговым двигателем энкодером;
- потребление энергии не уменьшается даже без нагрузки;
- затруднена работа на высоких скоростях;
- невысокая удельная мощность;
- относительно сложная схема управления.
Применение шаговых двигателей:
- приводы осей координатных столов и манипуляторов;
- системы линейного перемещения;
- упаковочные и конвейерное оборудование;
- оборудование для текстильного и пищевого производств;
- полиграфическое оборудование;
- устройство подачи, дозирования;
- сварочные автоматы.
Принцип работы шагового двигателя
Основной принцип работы шагового двигателя заключается в следующем — двухполюсный ротор электродвигателя, сделанный из специальной магнитомягкой стали, располагается в четырехполюсном статоре. Первая полюсная пара сделана из магнитов (постоянных), на второй паре имеется обмотка управления шаговым электродвигателем. В то время, когда ток в обмотках управления отсутствует, ротор двигателя располагается вдоль магнитов и стабильно удерживается с некоторым усилием (зависящее от силы магнитного потока).
Как только осуществляется подача напряжения (постоянного) на обмотку управления шаговым электродвигателем, появляется магнитный поток, что больший магнитного потока имеющихся постоянных магнитов. Под воздействием усилия (электромагнитного) ротор начинает менять угол, стараясь войти в положение соосное с полюсами обмотки управления. Последующий импульс управления полностью отключает электрическое напряжение с обмотки управления. Вследствие этого ротор движка движется под воздействием магнитного потока магнитов.
В данной работе описывается алгоритм управления шаговыми двигателями двухфазного (биполярного) и четырёхфазного (униполярного) типа с помощью модуля управления шаговым двигателем с интерфейсом CAN ZET 7160-S StepMotor-CAN или интерфейсом RS-485 ZET 7060-S StepMotor-485.
Биполярный (двухфазный) шаговый двигатель
Двухфазный шаговый двигатель (биполярный шаговый двигатель) имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
 Рис. 1 Внутренняя схема биполярного Ш.Д. |  Рис. 2 Схема выводов биполярного Ш.Д. |  Рис. 3 Схема подключения биполярного Ш.Д. к ZET7X60-S |
Униполярный (четырёхфазный) шаговый двигатель
Четырёхфазный шаговый двигатель (униполярный шаговый двигатель) также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов.
 Рис. 4 Внутренняя схема униполярного Ш.Д. |  Рис. 5 Схема выводов униполярного Ш.Д. |  Рис. 6 Схема подключения униполярного Ш.Д. к ZET7X60-S |
Режимы работы шагового двигателя
Существует несколько способов управления фазами шагового двигателя. Наиболее распространёнными из них являются полношаговый и полушаговый режим. Существуют также режимы управления с 1/4, 1/8, 1/16 шага. Но эти режимы нужны только для узкого круга задач, и они требуют значительного усложнения схемы микроконтроллера и алгоритма управления. Ниже приводится последовательность генерируемых импульсов для различных режимов работы шагового двигателя, на примере униполярного двигателя.
Рис. 7 Полношаговый режим, с 1-ой активной обмоткой на каждом шаге
Рис. 8 Полношаговый режим, с 2-мя активными обмотками на каждом шаге
Рис. 9 Полушаговый режим
Разгон и торможение шагового двигателя
Такой параметр шагового двигателя, как зависимость момента от скорости является важнейшим при выборе типа двигателя, выборе метода управления фазами и выборе схемы драйвера. При конструировании высокоскоростных драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (рис. 10а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения (рис. 10б).
Рис. 10 Зависимость тока в обмотках Ш.Д. от частоты
Таким образом, для работы с шаговым двигателем на большой скорости необходимо выполнять его разгон и замедление, в противном случае произойдёт потеря синхронности между шаговым двигателем и контроллером, и положение ротора шагового двигателя будет утеряно.
Управление шаговым двигателем с помощью модуля ZET7X60-S StepMotor
Перед началом работы с шаговым двигателем необходимо выставить необходимые параметеры на вкладке «Настройки»:
- Частота опроса — частота, с которой будет обновляться информация в канале о количестве проделанных шагов;
- Тип двигателя — тип двигателя, подключенного к модулю ZET 7X60-S StepMotor.
После этого с помощью вкладки «Управление» можно начинать управление шаговым двигателем.
- Старт/Стоп — начать /остановить движение шагового двигателя;
- Направление вращения — задаём направление вращения шагового двигателя, по или против часовой стрелки;
- Кол-во шагов до остановки — количество шагов, которое проделает шаговый двигатель после запуска;
- Время одного шага — скорость вращения шагового двигателя.
 Рис. 11 Вкладка «Настройки» в программе MODBUS-ZETLAB |  Рис. 12 Вкладка «Управление» в программе MODBUS-ZETLAB |
Во время выполнения команды, контроллер сообщает о количестве проделанных шагов на данный момент с частотой заданной в настройках (Настройки —> Частота опроса).
Рис. 13 Отображение количества проделанных шагов в программе ZETLAB «Многоканальный осциллограф»
Система управления шаговым двигателем с обратной связью
Система управления шаговым двигателем с обратной связью строится на базе модуля управления шаговым двигателем ZET 7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN) и интеллектуального энкодера ZET 7060-E Encoder-485 (ZET 7160-E Encoder-CAN). Для подключения к системе ZETLAB используется преобразователь интерфейса ZET 7070. Управление шаговым двигателем осуществляется подачей сигналов с модуля ZET7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN). Контроль состоянием шагового двигателя осуществляется энкодером, сигнал с которого обрабатывается модулем ZET 7060-E Encoder-485 (ZET 7160-E Encoder-CAN). Обработка сигналов с интеллектуального энкодера и программное управление модулем ZET7060-S StepMotor-485 (ZET 7160-S StepMotor-CAN) осуществляется с помощью программного обеспечения ZETLAB.
Схема системы управления шаговым двигателем с обратной связью
Состав системы управления шаговым двигателем с обратной связью

