
Классификация электродвигателей
Классификация электродвигателей
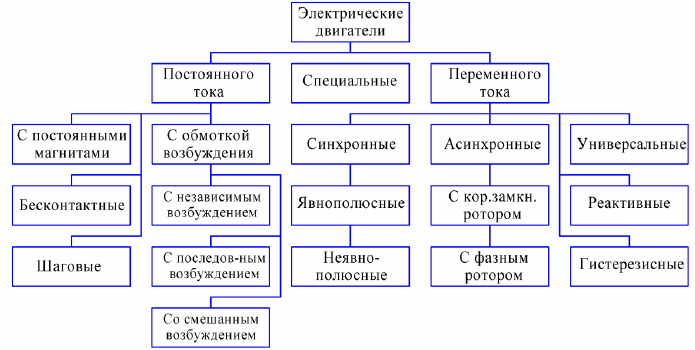
В зависимости от назначения, от предполагаемых режимов и условий работы, от типа питания и т. д., все электродвигатели можно классифицировать по нескольким параметрам: по принципу получения рабочего момента, по способу работы, по роду тока питания, по способу управления фазами, по типу возбуждения и т. д. Давайте же рассмотрим классификацию электродвигателей более подробно.

Возникновение вращающего момента
Вращающий момент в электродвигателях может быть получен одним из двух способов: по принципу магнитного гистерезиса либо чисто магнитоэлектрически. Гистерезисный двигатель получает вращающий момент посредством явления гистерезиса во время перемагничивания магнитно-твердого ротора, в то время как у магнитоэлектрического двигателя вращающий момент является результатом взаимодействия явных магнитных полюсов ротора и статора.

Магнитоэлектрические двигатели по праву составляют сегодня львиную долю всего обилия электродвигателей, применяемых в очень многих областях. Они подразделяются по роду питающего тока на:
- двигатели постоянного тока,
- двигатели переменного тока,
- универсальные двигатели.
В отличие от магнитоэлектрического двигателя, в гистерезисном двигателе допускается перемещение намагниченности ротора относительно его геометрических осей, и именно данная особенность не позволяет распространять на синхронный режим работы гистерезисного двигателя общие закономерности магнитоэлектрического преобразования.
Двигатели постоянного тока

У двигателя, который питается постоянным током, за переключение фаз отвечает сам двигатель. Это значит, что хотя на электрическую машину и подается постоянный ток, тем не менее, благодаря действию внутренних механизмов устройства, магнитное поле оказывается движущимся и становится в состоянии поддерживать вращающий момент ротора (как будто в обмотке статора действует переменный ток).
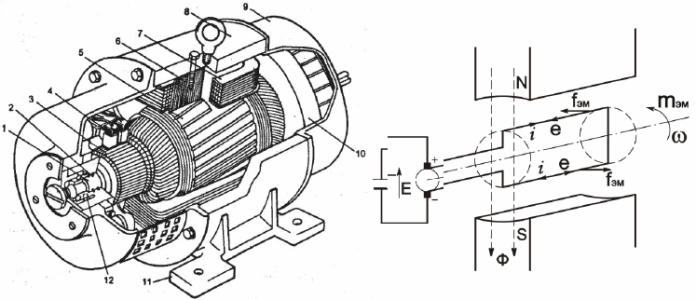
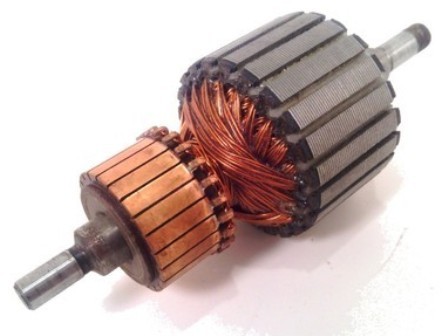
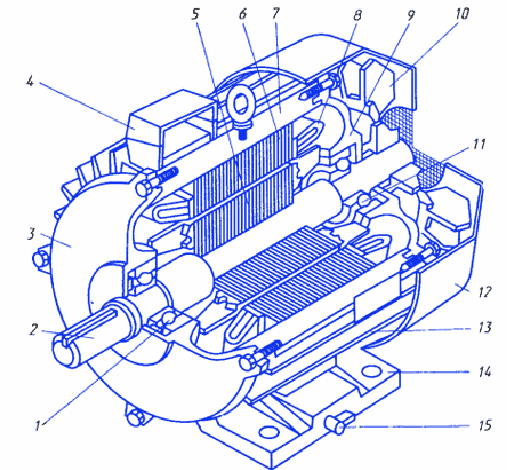
Устройство и приницип работы электродвигателя постоянного тока: 1 — якорь, 2 — вал, 3 — коллекторные пластины, 4 — щеточный узел, 5 — магнитопровод якоря, 6 — магнитопровод индуктора, 7 — обмотки возбуждения, 8 — корпус индуктора, 9 — боковые крышки, 10 — вентилятор, 11 — лапы, 12 — подшипники.
Электродвигатель постоянного тока состоит из неподвижной части, называемой индуктором, и подвижной части, называемой якорем. В зависимости от исполнения, место обмотки возбуждения на индукторе могут располагаться постоянные магниты, что позволяет упростить конструкцию, но не позволяет регулировать магнитный поток двигателя, влияющий на его скорость.
По способу создания движущегося магнитного поля, двигатели постоянного тока подразделяются на:
- вентильные (бесколлекторные),
- коллекторные.
Бесколлекторные двигатели имеют в своей конструкции электронные инверторы, которые и осуществляют переключение фаз. Коллекторные же двигатели традиционно оснащены щеточно-коллекторными узлами, которые призваны чисто механически синхронизировать питание обмоток двигателя с вращением его движущихся частей.
Возбуждение коллекторных двигателей
Коллекторные двигатели по способу возбуждения бывают следующих видов: с независимым возбуждением от постоянных магнитов или от электромагнитов, либо с самовозбуждением. Двигатели с возбуждением от постоянных магнитов содержат магниты на роторе. Двигатели с самовозбуждением имеют на роторе специальную якорную обмотку, которая может быть включена параллельно, последовательно или смешано со специальной обмоткой возбуждения.
Двигатель пульсирующего тока
На двигатель постоянного тока похож двигатель пульсирующего тока. Отличие заключается в наличии шихтованных вставок на остове, а также дополнительных шихтованных полюсов. Кроме того, у двигателя пульсирующего тока имеется компенсационная обмотка. Применение такие двигатели находит в электровозах, где они обычно питается выпрямленным переменным током.
Двигатель переменного тока
Двигатели переменного тока, как ясно из названия, питаются током переменным. Бывают они синхронными и асинхронными.
У синхронных двигателей переменного тока магнитное поле статора движется с той же угловой скоростью, что и ротор, а у асинхронных всегда есть некое отставание (характеризующееся величиной скольжения s) — магнитное поле статора в своем движении как бы опережает ротор, который в свою очередь все время стремится его догнать.
Синхронные двигатели больших мощностей (мощностью в сотни киловатт) имеют на роторе обмотки возбуждения. Роторы менее мощных синхронных двигателей оснащены постоянными магнитами, которые и образуют полюса. Гистерезисные двигатели тоже в принципе относятся к синхронным.
Шаговые двигатели — это особая категория синхронных двигателей с высокой точностью управления скоростью вращения, вплоть до дискретного счета шагов.
Вентильные синхронные реактивные двигатели получают питание через инвертор.
Асинхронные двигатели переменного тока отличаются тем, что у них угловая скорость вращения ротора всегда меньше чем угловая скорость вращения магнитного поля статора. Асинхронные двигатели бывают однофазными (с пусковой обмоткой), двухфазными (к ним относится и конденсаторный двигатель), трехфазными и многофазными.
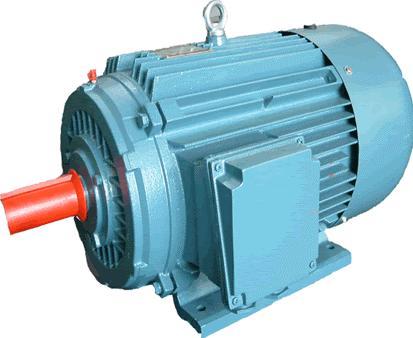
Конструкция трехфазного асинхронного электродвигателя с короткозамкнутым ротором
Асинхронный электродвигатель состоит и неподвижной (статора) части и подвижной (ротора) частей, которые удерживаются подшипниками 1 и 11, установленными в боковые крышки 3 и 9. Ротор состоит из вала 2, на котором закреплен магнитопровод 5 с обмоткой. Статор двигателя состоит из корпуса 7, к которому прикреплен магнитопровод 6. В пазы магнитопровода уложена трехфазная обмотка 8. Так же к корпусу крепится крышка клеммной коробки 4 и защитный кожух 12 крыльчатки 10.
Фазный ротор имеет трехфазную обмотку, выполненную по типу обмотки статора. Одни концы катушек соединены в нулевую точку («звезда»), а другие – подключены к контактным кольцам. На кольца наложены щетки, осуществляющие скользящий контакт с обмоткой ротора. При такой конструкции возможно подсоединение к обмотке ротора пускового или регулировочного реостата, позволяющего менять электрическое сопротивление в цепи ротора.
Асинхронный двигатель с частотным преобразователем для плавного регулирования скороcти вращения вала за счет изменения частоты и питающего напряжения:

Универсальные коллекторные двигатели
Универсальный коллекторнй двигатель может работать хоть от постоянного, хоть от переменного тока (50 Гц). Имеет последовательное возбуждение, используется в бытовых электроприборах, где требуется скорость вращения более высокая чем максимальные для обычных двигателей переменного тока 3000 об/мин. Как правило, мощность таких двигателей не превышает 200 Вт. Встречается тиристорное управление скоростью вращения универсального двигателя.
Усовершенствованная разновидность универсального двигателя — синхронный двигатель с датчиком положения ротора, где роль коллектора выполняет электронный инвертор.
§ 23.3. Гистерезисные двигатели
Работа гистерезисного двигателя основана на действии гистерезисного момента. На рис. 23.6, а показаны два полюса постоянного магнита (поле статора); между ними расположен цилиндр (ротор) из магнитно-твердого материала. Под действием внешнего магнитного поля ротор намагничивается. На стороне обращенной к северному полюсу постоянного магнита, возбуждается южный полюс, а на стороне ротора, обращенной к южному полюсу постоянного магнита, — северный полюс. На ротор начинают действовать силы  , направленные радиально к его поверхности. Если полюсы постоянного магнита вращать вокруг ротора, то вследствие явлениямагнитного запаздывания (гистерезиса) активная часть ротора не будет перемагничиваться одновременно с изменением направления вращающегося магнитного поля и между осью поля ротора и осью внешнего поля появится угол
, направленные радиально к его поверхности. Если полюсы постоянного магнита вращать вокруг ротора, то вследствие явлениямагнитного запаздывания (гистерезиса) активная часть ротора не будет перемагничиваться одновременно с изменением направления вращающегося магнитного поля и между осью поля ротора и осью внешнего поля появится угол  .
.
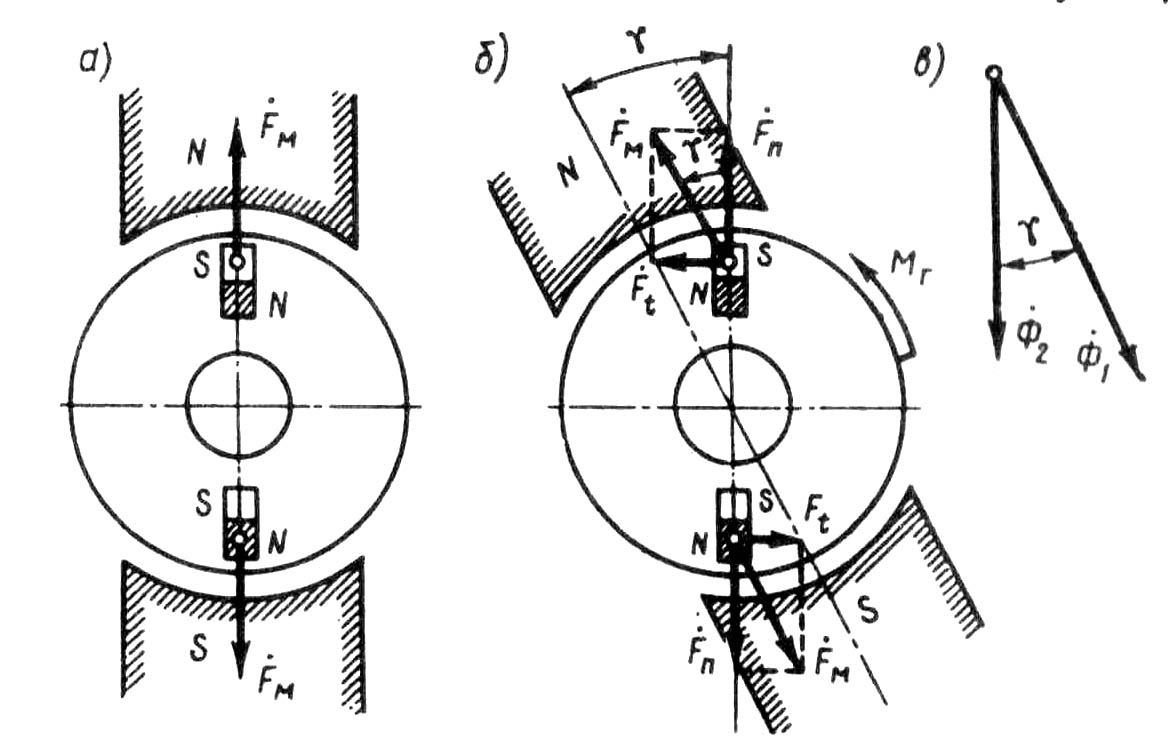
Рис. 23.6. К понятию о гистерезисном моменте
Силы  , действующие на ротор, также изменят свое направление на угол
, действующие на ротор, также изменят свое направление на угол  ,а тангенциальные составляющие этих сил
,а тангенциальные составляющие этих сил  , создадут гистерезисный момент Мг (рис. 23.6, б).
, создадут гистерезисный момент Мг (рис. 23.6, б).
Явление магнитного запаздывания заключается в том, что частицы ферромагнитного материала (помещенного во внешнее магнитное поле), представляющие собой элементарные магниты, стремятся ориентироваться в соответствии с направлением внешнего поля. Если внешнее поле изменит свое направление, то элементарные частицы меняют свою ориентацию. Однако повороту элементарных частиц препятствуют в магнитно-твердых материалах внутренние силы молекулярного трения. Для изменения направления этих частиц необходима определенная МДС, вследствие чего перемагничивание ротора несколько отстает от изменении направления внешнего поля. Это отставание (магнитное запаздывание) характеризуется углом гистерезисного сдвига  между вектором магнитного потока ротора
между вектором магнитного потока ротора  и вектором магнитного потока обмотки статора
и вектором магнитного потока обмотки статора  , (рис. 23.6, в). Этот угол зависит исключительно от магнитных свойств материала ротора.
, (рис. 23.6, в). Этот угол зависит исключительно от магнитных свойств материала ротора.
На преодоление сил молекулярного трения расходуется часть подводимой мощности, которая составляет потери на гистерезис. Величина этих потерь зависит от частоты перемагничивания ротора  , а следовательно, от скольжения:
, а следовательно, от скольжения:
 (23.2)
(23.2)
где  — потери на гистерезис при неподвижном роторе (при
— потери на гистерезис при неподвижном роторе (при =1),
=1),
т. е. в режиме к. з.
Так как электромагнитная мощность, передаваемая ротору, равна потерям в роторе, деленным на скольжение [см. (13.5)]:
 , (23-3)
, (23-3)
а вращающий момент — электромагнитной мощности, деленной на синхронную угловую скорость:
 (23.4)
(23.4)
то, очевидно, величина гистерезисного момента не зависит от частоты вращения ротора (скольжения). График Мг = представляет собой прямую, параллельную оси абсцисс (рис. 23.7).
представляет собой прямую, параллельную оси абсцисс (рис. 23.7).
Угол гистерезисного сдвига зависит от ширины петли гистерезиса: чем шире петля гистерезиса магнитного материала, тем больше угол гистерезисного сдвига. На рис. 23.8, а представлены две петли гистерезиса: обычной стали (кривая 2) и сплава викаллой (кривая 1).
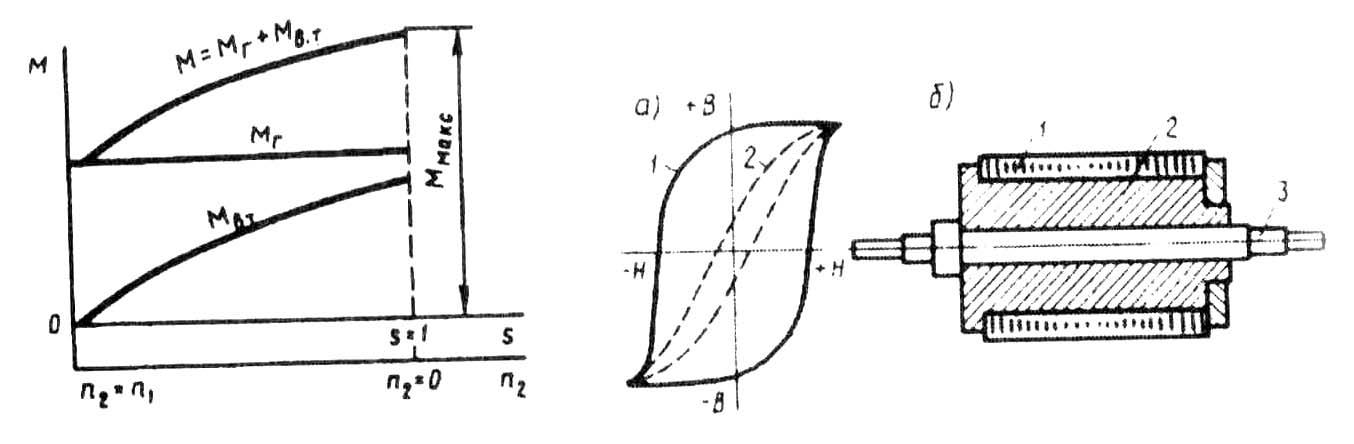
Рис. 23.7. Механические характеристики гистерезисного двигателя
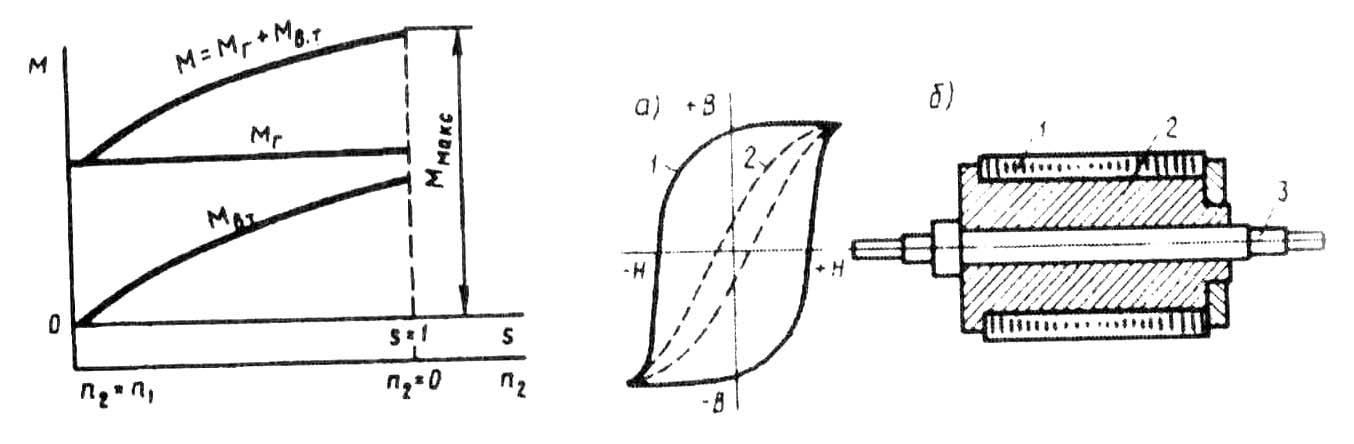
Рис. 23.8. Петли гистерезиса обычной электротехнической стали
и сплава викаллой (а) и устройство сборного ротор;
гистерезисного двигателя (б)
Применение обычной стали для изготовления ротора не обеспечивает гистерезисного момента достаточной величины. Только магнитно-твердые материалы, например такие, как
викаллой, дают возможность получить большой гистерезисный момент. Роторы гистерезисных двигателей обычно делают сборными. Магнитно-твердая часть выполняется в виде шихтованного или массивного кольца 1, размещенного на втулке 2 (рис. 23.8, б). Последняя жестко посажена на вал 3.
В машинах с нешихтованным (массивным) ротором вращающееся поле статора наводит в роторе вихревые токи. В результат взаимодействия этих токов с полем статора возникает электромагнитный момент  , значение которого пропорционально скольжению:
, значение которого пропорционально скольжению:
 (23.5)
(23.5)
где  — потери на вихревые токи в роторе при
— потери на вихревые токи в роторе при = 1, т. е. в режиме к.з., Вт;
= 1, т. е. в режиме к.з., Вт;  , — угловая синхронная скорость, рад/с.
, — угловая синхронная скорость, рад/с.
Наибольшего значения момент  достигает при неподвижном роторе (
достигает при неподвижном роторе ( = 1), т. е. в момент пуска электродвигателя. Затем помере возрастания частоты вращения (уменьшении скольжения) момент
= 1), т. е. в момент пуска электродвигателя. Затем помере возрастания частоты вращения (уменьшении скольжения) момент  убывает (см. рис. 23.7), при синхронной частоте онстановится равным нулю.
убывает (см. рис. 23.7), при синхронной частоте онстановится равным нулю.
Таким образом, электромагнитный вращающий момент гистерезисного двигателя создается совместным действием моментов от вихревых токов  и гистерезисного Мг:
и гистерезисного Мг:
М=Мвт + Мт= . (23.6)
. (23.6)
На рис. 23.7 представлена зависимость результирующего момента гистерезисного двигателя от скольжения: М =  . Характер этой кривой зависит от соотношения моментов
. Характер этой кривой зависит от соотношения моментов  и Мг.
и Мг.
Гистерезисный двигатель может работать с синхронной и асинхронной частотами вращения. Однако работа двигателя в асинхронном режиме неэкономична, так как связана со значительными потерями на перемагничивание ротора, величина которых возрастает с увеличением скольжения.
Достоинства гистерезисных двигателей — простота конструкции, бесшумность и надежность в работе, большой пусковой момент, плавность входа в синхронизм, сравнительно высокий КПД, малое изменение кратности тока от пуска до номинальной нагрузки ( ).
).
Недостатки гистерезисных двигателей — низкий коэффициент мощности ( , = 0,4—0,5) и сравнительно высокая стоимость.Кроме того, при резких колебаниях нагрузки гистерезисные двигатели склонны к качаниям, что создает неравномерность хода (вращения). Объясняется это отсутствием у гистерезисных двигателей пусковой клетки, которая при резких изменениях нагрузки оказывает на ротор успокаивающее (демпфирующее) действие. Наиболее сильные качания наблюдаются у шихтованного ротора, в котором вихревые токи сильно ограничены. Вызываемая качаниями неравномерность вращения ограничивает области применения гистерезисных двигателей.
, = 0,4—0,5) и сравнительно высокая стоимость.Кроме того, при резких колебаниях нагрузки гистерезисные двигатели склонны к качаниям, что создает неравномерность хода (вращения). Объясняется это отсутствием у гистерезисных двигателей пусковой клетки, которая при резких изменениях нагрузки оказывает на ротор успокаивающее (демпфирующее) действие. Наиболее сильные качания наблюдаются у шихтованного ротора, в котором вихревые токи сильно ограничены. Вызываемая качаниями неравномерность вращения ограничивает области применения гистерезисных двигателей.
Принцип работы гистерезисных тормозов

Гистерезисные тормоза создают номинальный крутящий момент (нагрузку) от 0 оборотов и обеспечивают стабильную нагрузку по всему диапазону частоты вращения. Отличительной особенностью является обеспечение плавного нагружения, длительный срок службы, превосходная повторяемость, высокая степень управляемости и меньшее время обслуживания и простоя. Это позволяет использовать их в системах контроля крутящего момента, испытательных и промышленных стендах.
Принципы работы и особенности данной технологии описаны ниже.
Принцип работы
В подобных тормозах эффект магнитного гистерезиса применяется для управления крутящим моментом с использованием двух основных компонентов: сетчатой конструкции полюса и чаши ротора/вала в сборе, но без физического контакта. Пока на катушку возбуждения не подается напряжение, чашка и вал могут свободно вращаться на подшипниках. Когда подается ток воздушный зазор становится областью действия магнитного поля. Ротор сдерживается данным полем, при этом обеспечивается торможение в конструкции между полюсом и ротором. Соответственно, усилие торможения регулируется путем изменения электрического тока, который подается к устройству системой управления тормозом. Поскольку крутящий момент создается через магнитный воздушный зазор, не происходит какого либо физического контакта частей и механизмов, а, следовательно, не образуются продукты взаимодействия (например, при трении накапливаются отколовшиеся частицы соприкасающихся материалов), гистерезисные тормоза позволяют обеспечивать следующие характеристики:
- Длительный срок службы;
- Практически отсутствует необходимость в обслуживании;
- Плавность нагружения;
- Крутящий момент не зависит от скорости;
- Широкие возможности по регулировке усилия сопротивления;
- Высокая степень повторяемости;
- Стабильность и неприхотливость в работе.
Контроль и управление.
Величина тормозного момента, создаваемого тормозом, пропорциональна величине тока, протекающего через тормозную катушку. Возможна регулировка крутящего момента от минимального значения (значения сопротивления подшипника как единственной части, обеспечивающей физический контакт в механизме) до максимального значения момента. Направление тока (полярность) никак не влияет на работу тормоза. Для оптимальной стабильности крутящего момента рекомендуется использовать источник постоянного тока с высоким разрешением по регулировке. Это поможет свести к минимуму смещение момента, связанное с изменением температуры катушки и линейного напряжения, что может привести к изменению тока в катушке и, как следствие, к изменению крутящего момента.
Номинальный крутящий момент отдельных экземпляров может быть больше указанных в описании к соответствующей модели. Данное значение, благодаря наличию собственной испытательной лаборатории Magtrol, указывается в техническом паспорте конкретного оборудования (увеличение номинала при этом не увеличивает стоимость) и подтверждается TestData от лаборатории Magtrol.
Электродвигатели синхронные гистерезисные серии Г
Общие сведения
Двигатели синхронные гистерезисные серии Г (трехфазные и однофазные) предназначены для комплектации различных изделий в качестве встраиваемого привода механизмов со строго постоянной частотой вращения.
Двигатели изготовляются для внутригосударственных и экспортных поставок.
Структура условного обозначения
ГХХХ УХЛ4:
Г — гистерезисный;
Х — габарит двигателя (2, 3, 4, 5);
ХХ — порядковый номер разработки (04, 05, 07, 09, 11, 12, 13,
14, 15, 16);
УХЛ4 — климатическое исполнение и категория размещения по ГОСТ
15150-69 и ГОСТ 15543.1-89.
Условия эксплуатации
Высота над уровнем моря до 1000 м.
Температура окружающей среды от 0 до 45°С.
Относительная влажность воздуха до 80% при температуре (25±10)°С.
Требования техники безопасности по ГОСТ 12.2.007.1-75.
Двигатели также соответствуют требованиям «Правил технической эксплуатации электроустановок потребителей» и «Правил техники безопасности при эксплуатации электроустановок потребителей».
Условия транспортирования двигателей в части воздействия механических факторов по группе Л ГОСТ 23216-78, в части воздействия климатических факторов по группе условий хранения 5 ГОСТ 15150-69.
Условия хранения двигателей по группе 1 ГОСТ 15150-69 при сроке хранения 0,5 года для внутригосударственных поставок и 1 год для экспортных поставок.
Двигатели отвечают требованиям ГОСТ 16264. 0-85, ГОСТ 16264.2-85
Нормативно-технический документ
ТУ 16-512.243-76.
Двигатели, поставляемые на экспорт, дополнительно отвечают требованиям РД 16 01.007-88. A ГОСТ 16264.0-85,ГОСТ 16264.2-85,ТУ 6.512.243-76, РД 16.01.007-88
Технические характеристики
Основные технические данные двигателей приведены в таблице.
| Наименование параметра | Значение параметра двигателей типов | |||||||||||||
| Г205 | Г216 | Г304 | Г313 | Г314 | Г316 | Г411 | Г412 | Г413 | Г415 | Г504 | Г507 | Г509 | Г511 | |
| 1 | 3 | 1 | 3 | 1 | 3 | 1 | ||||||||
| 1,6 | 0,8 | 12 | 7 | 8 | 4 | 30 | 20 | 16 | 12 | 60 | 45 | 40 | 30 | |
| 220 | 127 | 220 | ||||||||||||
| 3000 | 1500 | 3000 | 1500 | 3000 | 1500 | 3000 | 1500 | 3000 | 1500 | 3000 | 1500 | 3000 | 1500 | |
| 0,51 | 0,53 | 3,92 | 4,51 | 2,55 | 2,55 | 9,74 | 12,75 | 5,1 | 7,65 | 19,6 | 29,4 | 12,75 | 19,1 | |
| 19 | 16 | 40 | 32 | 34 | 28,6 | 70 | 57 | 60 | 50 | 120 | 105 | 100 | 90 | |
| – | – | 28 | 24 | 28 | 26 | 40 | 35 | 40 | 39 | 60 | 55 | 60 | 60 | |
| 0,09 | 0,15 | 0,26 | 0,18 | 0,17 | 0,16 | 0,5 | 0,42 | 0,4 | 1,16 | 1,1 | 0,7 | 0,6 | ||
| 0,12 | 0,15 | 0,3 | 0,2 | 0,21 | 0,2 | 0,6 | 0,48 | 0,55 | 0,5 | 1,35 | 1,2 | 0,9 | ||
| 8,4 | 5 | 30 | 21,9 | 23,5 | 14 | 43 | 35,1 | 26,7 | 30,8 | 50 | 42,9 | 40 | 33,3 | |
| 0,96 | 0,84 | 0,405 | 0,465 | 0,91 | 0,81 | 0,36 | 0,35 | 0,68 | 0,56 | 0,272 | 0,25 | 0,65 | 0,68 | |
| 2 | 5 | – | – | 2,5 | 2 | – | – | 5 | 4 | – | – | 10 | 9 | |
| 170 | 250 | – | – | 250 | 300 | – | – | 300 | – | – | 390 | 300 | ||
| 0,32 | 1 | 1,9 | 3,7 | |||||||||||
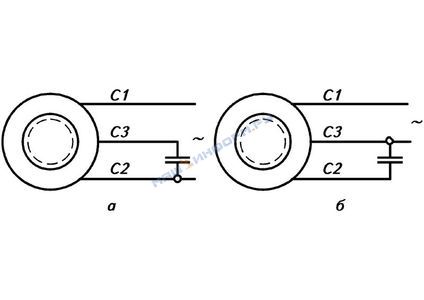
Схемы включения и обозначение выходных концов синхронных гистерезисных электродвигателей типов Г314, Г316, Г413, Г415, Г509 и Г511:
а — правое вращение;
б — левое вращение
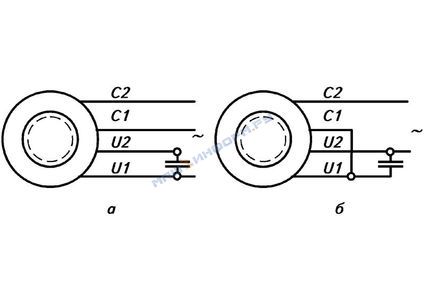
Схемы включения и обозначение выходных концов синхронных гистерезисных электродвигателей типа Г216:
а — правое вращение;
б — левое вращение
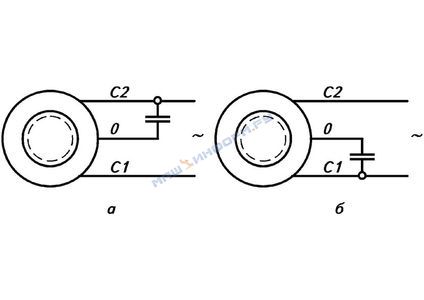
Схемы включения и обозначение выходных концов синхронных гистерезисных электродвигателей типа Г205:
а — правое вращение;
б — левое вращение
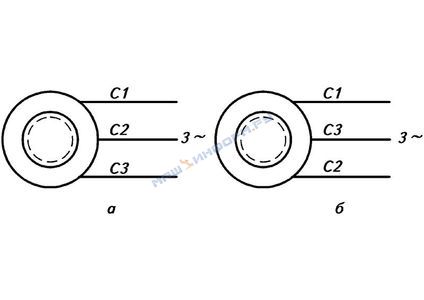
Схемы включения и обозначение выходных концов синхронных гистерезисных электродвигателей типов Г304, Г313, Г411, Г412, Г504, Г507:
а — правое вращение;
б — левое вращение
Двигатели в течение 5 с при номинальном напряжении выдерживают без повреждений режим короткого замыкания.
Сопротивление изоляции обмоток относительно корпуса составляет не менее:
100 МОм — в практически холодном состоянии;
10 МОм — при установившейся рабочей температуре.
Изоляция обмоток двигателей относительно корпуса в течение 1 мин выдерживает без повреждений в нормальных климатических условиях и после испытания на нагревание практически синусоидальное напряжение (действующее значение) 1500 В частотой 50 Гц.
Испытание на электрическую прочность изоляции потребителем допускается не более трех раз напряжением, составляющим 80% указанного.
Среднее квадратичное значение виброскорости 1,8 мм/с.
Средний уровень звука на расстоянии 1 м от наружного контура 53 дБА.
Класс нагревостойкости Е по ГОСТ 8865-87.
Превышение температуры обмоток или отдельных частей двигателей над верхним значением температуры окружающей среды не должно быть более 75, а для двигателей Г205 УХЛ4 — 95°С.
Установленная безотказная наработка — 500 ч.
Срок службы — не менее 3 лет.
Гарантийный срок — 3 года со дня ввода двигателя в эксплуатацию при наработке, не превышающей 1000 ч, но не более 4 лет со дня его выпуска.
Для двигателей, предназначенных на экспорт, гарантийный срок эксплуатации по ГОСТ 16264.0-85.
Электродвигатель представляет собой синхронную машину, на статоре которой расположена трехфазная или однофазная обмотка. При подключении обмотки к сети в воздушном зазоре машины возникает вращающееся магнитное поле, которое перемагничивает активную часть неподвижного ротора. Вследствие явления магнитного запаздывания (гистерезиса) возникает электромагнитный момент, который увлекает ротор в сторону вращения поля.
В тонкостенный стальной кожух завальцованы два стальных щита, между которыми установлен статор. Статор представляет собой пакет, набранный из листов электротехнической стали. Статор составной, имеет закрытые пазы, в которые уложена обмотка. Выводные концы обмотки припаяны к контактным клеммам.
Ротор представляет собой вал с напрессованной на него немагнитной втулкой, на которую набран пакет из колец магнитотвердого сплава. Ротор динамически сбалансирован с помощью напрессованных на вал двух балансировочных колец; вращается в подшипниках.
Двигатель с двух сторон закрыт фланцами с кольцевыми лабиринтовыми канавками, заполненными смазочным материалом.
Габаритные, установочные и присоединительные размеры двигателя представлены на рис. 5.
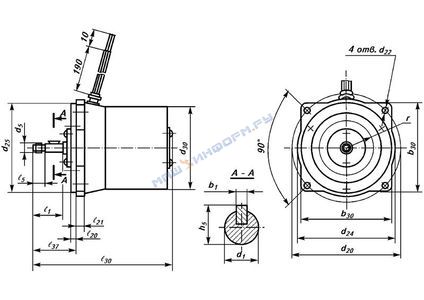
| Габарит двигателя | Размеры, мм | ||||||||||||||||
| b 1 | b 30 | d 1 | d 5 | d 20 | d 22 | d 24 | d 25 | d 30 | h 5 | l 1 | l 5 | l 20 | l 21 | l 30 | l 37 | r | |
| 2 | 1,5 | 53,5 mах | 4 | М4 ? 0,5 | 64 | 3,5 | 58,5 mах | 55 | 49,5 mах | 4,7 | 15 | 5 | 3 | 6 mах | 79,5 mах | 22,5 | 16 |
| 3 | 70,5 mах | 5 | М4 ? 0,5 | 85 | 4,5 | 77,5 mах | 72 | 65,5 mах | 5,7 | 17 | 7,5 mах | 111,5 mах | 24,5 | 20 | |||
| 4 | 2 | 82,5 mах | 6 | М5 ? 0,5 | 102 | 93,5 mах | 88 | 80,5 mах | 6,9 | 20 | 6 | 7,5 mах | 138,5 mах | 28 | 25 | ||
| 5 | 97,5 mах | 7 | М5 ? 0,5 | 120 | 5,6 | 110,5 mах | 103 | 95,5 mах | 7,9 | 23 | 4 | 8,5 mах | 172,5 mах | 32,5 | 29 | ||
В комплект поставки входят: двигатель, паспорт (на каждый двигатель), инструкция по эксплуатации (1 экз. на упаковку при поставке первой партии двигателей потребителю), ведомость упаковки и сертификат качества (для экспортируемых двигателей).

