Стабилизатор частоты вращения
Стабилизатор частоты вращения
Cтабилизатор частоты вращения — регулятор с положительной обратной связью по току. Информацию о частоте вращения коллекторного двигателя можно извлечь из потребляемого им тока. Этот ток содержит переменную составляющую, первая гармоника которой имеет частоту, равную частоте вращения двигателя, умноженную на число пластин коллектора. Двигатели, которые чаще всего применяются в магнитофонах, имеют три пластины коллектора. Поэтому эта частота равна утроенной частоте вращения двигателя. Именно на этом принципе и построен описываемый регулятор.
 Принципиальная схема стабилизатора частоты вращения
Принципиальная схема стабилизатора частоты вращения
Для получения сигнала обратной связи в цепь питания двигателя включен датчик тока R1. Ток, потребляемый двигателем, создает на этом резисторе падение, которое имеет переменную составляющую около 100 мВ peak-to-peak (график 1). Основная гармоника выделяется с помощью простейшего ФНЧ R2C1 и через разделительный конденсатор C2 поступает на вход усилителя, собранного на ОУ U1A. Коэффициент усиления задан резисторами R4R5 так, чтобы усилитель работал в режиме ограничения. На его выходе формируетя практически прямоугольный сигнал с частотой, равной утроенной частоте вращения двигателя (график 2). Этот сигнал дифференцируется с помощью цепочки C3R6R7R8 (график 3). Отрицательный выброс ограничивается диодом VD1. Далее сигнал поступает на компаратор, в роли которого использован ОУ U1B. Опорное напряжение задается с помощью делителя R9R10. На выходе компаратора формируются прямоугольные импульсы постоянной длительности (график 4). Постоянная составляющая такой импульсной последовательности пропорциональна частоте следования импульсов, т.е. частоте вращения двигателя. Импульсная последовательность интегрируется с помощью цепочек R11R12C5 и R13C6. Постоянное напряжение, пропорциональное частоте вращения, поступает на пропорционально-интегрирующий регулятор, собранный на ОУ U1C. Для получения образцового напряжения применен регулируемый стабилитрон U2. Нужную частоту вращения устанавливают регулировкой этого напряжения с помощью переменного резистора R19. Выход ОУ U1C умощнен комплементарным эмиттерным повторителем на транзисторах VT1VT2. Казалось бы, направление тока питания двигателя всегда одно и то же и достаточно было бы одиночного эмитерного повторителя, который обеспечивал бы вытекающий ток. Но на самом деле с двухтактным эмиттерным повторителем гораздо лучше поведение системы во время переходных процессов (при пуске двигателя или при резких колебаниях нагрузки на валу).
 Форма сигналов в контрольных точках
Форма сигналов в контрольных точках
Нужно отдельно остановиться на проблеме устойчивости системы автоматического регулирования. В данной ситуации дело усложняется тем, что на устойчивость влияют и механические параметры системы, которые количественно учесть очень трудно. Поэтому в некоторых случаях придется подобрать АЧХ регулятора с помощью элементов R16C7 или даже ограничить коэффициент усиления, включив параллельно этой цепочке резистор. Подбор нужно вести по критерию устойчивости регулятора как в установившемся режиме, так и во время переходных процессов. Для этого нужно с помощью осциллографа контролировать напряжение питания двигателя. При включении оно должно плавно достичь номинального значения, причем без колебательного процесса. Если при работающем я такждвигателе изменить нагрузку на валу, напряжение питание должно принять новое значение без колебательного процесса.
Полную версию этой статьи можно найти в журнале «Схемотехника», №4 за 2001 год. Автор — Л.Ридико
Подпишитесь на наши новости
Получайте первыми актуальную информацию от ООО «Электропривод»
Выбор шагового двигателя
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ О РЕЖИМАХ РАБОТЫ ШАГОВОГО ДВИГАТЕЛЯ
Модель работы идеального шагового двигателя
Шаговый двигатель — устройство с постоянной мощностью, если мощность определить как момент, умноженный на скорость. Это означает, что крутящий момент обратно пропорционален скорости. Чтобы уяснить, почему мощность мотора не зависит от скорости, представим себе идеальный шаговый двигатель.
В идеальном двигателе нет трения, его момент пропорционален амперо-виткам обмоток и единственной электрической характеристикой является индуктивность. Индуктивность L характеризует способность обмотки запасать энергию в магнитном поле. Индуктивности обладают свойством индуктивного сопортивления, т.е. сопротивления переменному току, которое тем больше, чем быстрее меняется ток, а значит, индуктивное сопротивление возрастает вместе со скоростью вращения двигателя. По закону Ома ток прямо пропорционален напряжению и обратно пропорционален полному сопротивлению, откуда следует, что ток обмотки уменьшается при увеличении скорости вращения. Т.к. момент пропорционален амперо-виткам, а ток обратно пропорционален скорости, то момент также будет обратно пропорционален скорости. Т.е. при нулевой скорости момент стремится к бесконечности, при увеличении скорости момент(и ток) начинает стремиться к нулю.
Электрически, реальный двигатель отличается от идеального в основном ненулевым сопротивлением обмотки, а также ферромагнитными составляющими, которым свойствоенно насыщаться магнитным полем, что приводит к гистерезисным потерям и потерям на вихревые токи. Насыщение ограничивает момент, а вихревые токи и гистерезисные потери вызывают нагрев мотора. Рассмотрим кривую зависимости крутящего момента шагового двигателя от скорости.
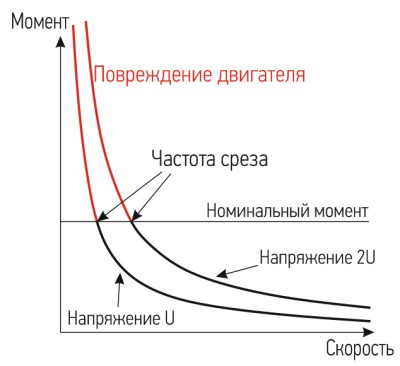
Как видно из графика, при скорости ниже определенного предела, момент, а следовательно и ток, возрастают очень быстро, вплоть до уровней, приводящих к повреждению мотора. Чтобы этого избежать, драйвер должен ограничивать нарастание тока до определенной величины. Поскольку момент пропорционален току, момент будет постоянен начиная с момента удержания до порогового значения скорости, а при скорости выше порога — ток будет ограничен индуктивностью обмоток.
В результате, скорость-моментная характеристика идеального двигателя будет начинаться с отрезка, где момент постоянный, до точки, когда мотор перестанет генерировать и потреблять реактивную мощность. Реальный шаговый двигатель обладает потерями, которые изменяют идеальную скорость-моментную характеристику. Особенно велик вклад момента от зубцовых гармоник магнитного поля(его иногда указывают в документации на двигатель). Потери в двигателе есть всегда, и чем быстрее вращается вал шагового мотора, тем больше потери, и их также необходимо вычитать из идеальной характеристики.
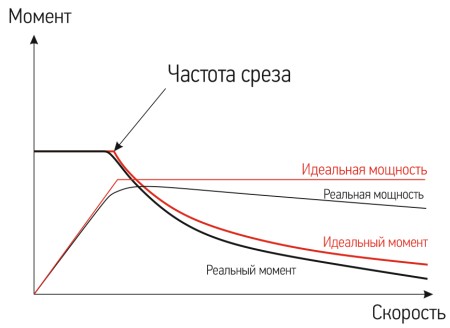
Обратите внимание, как реальная мощность падает вместе с ростом скорости, в том числе и на отрезке «постоянной мощности». Скругление на переходной точке обусловлено переходным процессом в цепи — драйвер постепенно превращается из источника тока в источник напряжения.
Резонанс на средних частотах
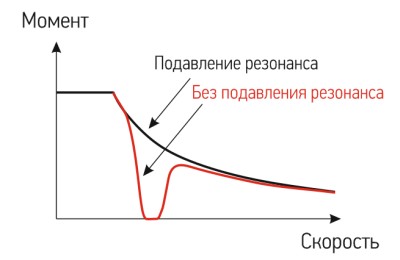
Шаговый двигатель сильно подвержен резонансу, являясь по факту аналогом маятника «подвешенный на пружине груз», где грузом является ротор, а пружиной — магнитное поле, и имеет частоту собственных колебаний, зависящую от силы тока и инерции ротора. В момент, когда разность фаз момента и скорости достигает величины 180 град., возникает резонанс – изменение магнитного поля начинает совпадать со скоростью, и скорость ротора при позиционировании на новый шаг становится слишком велика. При резонансе значительная часть энергии магнитного поля уходит на преодоление инерции ротора при колебании около положения равновесия, что выражается в значительном падении крутящего момента на валу. Накопленная кинетическая энергия ротора расходуется при возникновении резонанса примерно за 1-10 сек, поэтому разогнать двигатель можно, пройдя зону резонанса без последствий, но работать сколь-нибудь продолжительное время не удастся – вал остановится. Для устранения этого явления в драйверах используются различные антирезонансные алгоритмы.
Мощность двигателя
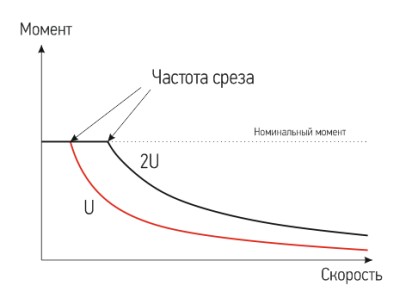
Выходная мощность двигателя (скорость×момент) пропорциональна напряжению, деленному на квадратный корень из индуктивности. Если мы увеличим вдвое напряжение ШИМ, то получим другую кривую СМХ, лежащую выше, и мощность на участке постоянной мощности вырастет вдвое. С током иная картина. Рисунок ниже показывает, что будет при выставлении на драйвере тока в 2 раза больше номинального для двигателя. Мотор начинает выделять в 4 раза больше тепла, а момент на низких оборотах увеличивается менее чем в 2 раза из-за насыщения сердечников обмоток.
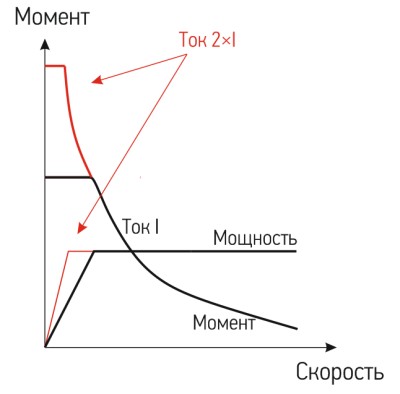
Как можно видеть, мощность не увеличивается вовсе. Всегда рекомендуется выставлять ток на драйвере равным номинальному значению для двигателя. Это в том числе снизит вибрации на низких частотах, улучшит характеристики хода в микрошаговом режиме.
Напряжение питания и нагрев двигателя
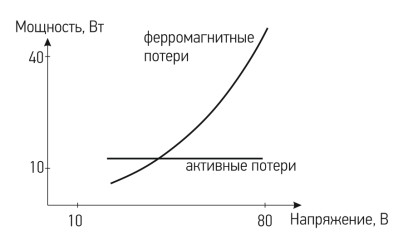
Основные причины нагрева двигателя: потери на сопротивлении обмоток и ферромагнитные потери. Первая часть всем знакома – это тепловая энергия, выделяющяяся на активном сопротивлении проводов обмоток, равная I2R. Вклад этого слагаемого велик только когда двигатель находится в режиме удержания, и резко уменьшается с возрастанием скорости двигателя. Ферромагнитными потерями назваются потери на токи Фуко и гистерезисные потери. Они зависят от изменения тока и, следовательно, от питающего напряжения, и выделяются в виде тепла. Как было сказано выше, мощность двигателя растет прямо пропорционально напряжению, однако ферромагнитные потери тоже растут, причем, в отличие от мощности, — нелинейно, что и ограничивает максимальное напряжения, которое можно использовать для драйвера. Можно сказать, что максимальная полезная мощность шагового двигателя определяется количеством тепла, которое может на нем безопасно выделяться. Поэтому не следует стараться выжать полкиловатта из двигателя 57 серии, подключив драйвер к источнику в 10 кВ – у напряжения есть разумные пределы. Их можно рассчитывать разными способами. Эмпирически было получено несколько оценок сверху для максимального питающего напряжения ШИМ-драйвера: оно не должно превышать номинальное напряжение обмоток более чем в 25 раз или величину 32√ L, где L – индуктивность обмотки.
Для наглядности ниже показан график, показывающий ферромагнитные потери для двигателя с номинальными характеристиками 4 А, 3 В.
Кратко о мощности шагового двигателя
Выбор двигателя и питающего напряжения целиком зависят от задач. В идеале, двигатель должен выдавать достаточный момент на максимальной планируемой скорости. Необходимо отличать момент от мощности двигателя: большой момент на низких скоростях не означает, что двигатель мощный. Выходная мощность – другой, более важный параметр, её примерно можно оценить по кривой скорости-момента. Теоретически, максимальная мощность, которую можно стабильно получать с драйвера, питаемого напряжением 80 В и выходным током 7 А примерно 250 Ватт(1/3 л.с.), в реальности же для этого потребуется 2 или 3 двигателя NEMA 34. Двигатели NEMA 23 слишком малы для отвода тепла, а NEMA 42 из-за размера не подходят по импедансу: если их номинальный ток меньше, чем 7 А, то напряжение будет больше 80 В, и наоборот. Момент от зубцовых гармоник в моторах NEMA 42 существенно больше, чем в малых моторах, и обязательно должен быть учтен при расчете выходной мощности. Другими словами, выходная мощность двигателей NEMA 42 падает быстрее, чем у меньших двигателей. NEMA 42 следует использовать, если требуется получить высокий момент на низких скоростях и нет смысла использовать мотор-редуктор.
О ЧЕМ ГОВОРЯТ ХАРАКТЕРИСТИКИ ШАГОВОГО ДВИГАТЕЛЯ
Если вы опустили все, написанное выше, или прочитали, но мало что поняли, данная глава поможет разобраться, как перейти к практической части. Несколько слов о размере двигателя. Развитие производства шаговых двигателей достигло больших успехов, и теперь шаговые двигатели одного размера разных производителей обладают очень схожими характеристиками. Именно размер двигателя задает рамки, в которых может изменяться его главная характеристика — кривая скорости-момента. Индуктивность обмотки показывает, насколько крута будет кривая СМХ при одинаковом напряжении питания драйвера с ШИМ: если мы возьмем 2 двигателя индентичного размера с разной индуктивностью, и будем управлять ими одним драйвером с одним и тем же питающим напряжением, полученные кривые СМХ будут отличаться крутизной.
Большая индуктивность потенциально дает вам возможность получить больший крутящий момент, но чтобы произвести такую конверсию, потребуется драйвер с большим напряжением питания — тогда кривая СМХ поднимется вверх пропорционально увеличению напряжения. На практике почти все фирмы производят моторы одного размера в двух исполнениях — «медленный» и «быстрый», с большой и малой индуктивностью. Причем «быстрые» модели пользуются большей популярностью — для них на высоких оборотах требуется меньшее напряжение, а значит более дешевые драйверы и источник питания. А если вдруг не хватает мощности — можно взять двигатель побольше. «Медленные» модели остаются для специфических применений — в случаях, когда от шагового привода не требуется больших скоростей, нужен большой момент удержания и т.п. Ток обмотки косвенно связан с крутящим моментом, но в основном он говорит о том, какой драйвер нужно будет подобрать к этому двигателю — он должен быть способен выдавать именно такой уровень тока. Напряжения питания обмотки показывает, какое постоянное(не ШИМ) напряжение можно подавать на обмотку — таково значение напряжения, используемое драйверами постоянного напряжения. Оно пригодится при вычислении максимально допустимого напряжения питания драйвера с ШИМ, и тоже косвенно связано с максимальным крутящим моментом.
АЛГОРИТМ ПОДБОРА ШАГОВОГО ДВИГАТЕЛЯ
Так как же выбрать двигатель? Зависит от того, какими вы данными обладаете. По большому счету, выбор двигателя сводится к выбору 4 вещей — производителя, вида двигателя, размера и индуктивности. Первый параметр поддается оценке с трудом — мало у кого репрезентативная выборка образцов от разных поставщиков. Что касается вида двигателя, мы рекомендуем всегда, когда есть неопределенность в выборе, использовать биполярные шаговые двигатели с 4 выводами и малой индуктивностью. Т.е. выбор в основном заключается в выборе размера двигателя(в пределах одного размера характеристики двигателей с одной индуктивностью почти всех производителей практически совпадают). Для выбора конкретной модели можно использовать следующий алгоритм:
- Рассчитайте максимальную скорость вращения V в об/сек, которую хотите получить от привода, и момент M, который необходимо получить от него на этой скорости(закладывайте в это значение запас в 25-40%).
- Переведите скорость вращения в частоту полных шагов PPS, для стандартного двигателя с шагом 1.8 град PPS = 200 * V.
- Выберите примерно подходящий на первый взгляд размер двигателя, из числа доступных моделей этого размера выберите двигатель с не самой большой индуктивностью.
- Воспользуйтесь кривой СМХ, приводимой производителем, найдите на ней ваше значение PPS. Сверьтесь, достаточен ли момент, указанный на кривой.
- Если момент, указанный на кривой слишком мал, рассмотрите двигатель размером побольше, если слишком велик — размером поменьше.
Однако, часто этот способ дает неверные результаты по причине большого количества факторов и допущений при расчете момента. Запросто можно получить, что для управления небольшим портальным фрезером с порталом весом 15 кг вдруг потребуются двигатели ST86-114. Чаще используют эмпирические способы, и они оказываются точнее. Один из таких способов — определение двигателей по весу портала и размеру рабочего поля. Например, выбор шагового мотора для горизонтальной передачи(оси X и Y) можно осуществить исходя из веса подвижной части, передачи, направляющих и материалов, планируемых к обработке. Для портальных станков классической компоновки, с передачей ШВП, шагом 5 мм на оборот, для обработки дерева и пластика, скорость холостого хода до 4000 мм/мин, в предположении, что направляющие оси без преднатяга и отъюстированы так, что подвижная часть ходит по ним без какого-либо сопротивления, можно порекомендовать следующие значения:
- Вес подвижной части менее 5 кг — двигатель серии PL42 или аналогичный.
- Вес подвижной части 5-10 кг — двигатель PL57-56 или аналогичный.
- Вес подвижной части 10-23 кг — двигатель PL57-76 или аналогичный.
- Вес подвижной части 23-35 кг — двигатель PL86-80 или аналогичный.
- Вес подвижной части 35-50 кг — двигатель PL86-114 или аналогичный.
Совместно с этими оценками можно использовать оценки для размеров рабочего поля: Рабочее поле 0,1-0,5 кв.м. — двигатели PL57-76 или аналогичные. Рабочее поле 0,5-1 кв.м. — двигатели PL86-80 или аналогичные. Рабочее поле 1-1,5 кв.м. — двигатели PL86-114 или аналогичные. Если характеристики Вашего станка находятся в пограничных интервалах, скажем, вес портала 23 кг, поле около 0,5 кв. м., стоит использовать дополнительные оценочные методы. Еще один распространенный подход заключается в анализе готовых станков на рынке, которые близки к конструируемому по размерам и характеристикам — проверенная конструкция означает, что двигатели уже подобраны оптимальным образом, и можно взять их характеристики за основу.
И последнее, что можно порекомендовать — обратиться за консультацией к опытным специалистам.
Формула перевода момента в мощность
![]()
![]()
Как известно — стенды измеряют момент с колёс, (или все-таки мощность напрямую?) а мощность получается путём пересчёта.
Вот нашёл такую формулу, теперь каждый может проверить свой график.
Формула расчета мощности в зависимости от крутящего момента и оборотов двигателя:
P = Mкр х N : 9549, где:
Р — мощность в кВт (кило Ваттах)
Mкр — крутящий момент в Hм (Ньютона метрах)
N — обороты мотора об/мин
9549- это коэффициент, что бы не возится с косинусами альфа и обороты подставлять в об/мин.
Например, если мотор выдает 357 Нм момента при 4400 об/мин, его мощность в киловаттах:
357 x 4400 : 9549 =164,5 (кВт)
164.5 х 1.36 = 223,72 л.с.
Я свой график проверил))
PS: Так я прав: Первично на барабанах снимают момент в Нм?
А силы получают расчётом?
Комментарии 55

стенд измеряет мощность, а момент высчитывает

Что измеряет омметр?
Правильно, сопротивление.
Но на самом деле, чтобы измерить сопротивление, нужно приложить к измеряемому объекту напряжение, измерить ток, протекающий через этот объект, затем поделить напряжение на ток.
Так что измеряет омметр?
ТОК!
А сопротивление он вычисляет.
Мощность — это работа, совершенная за какой-то промежуток времени.
Мы можем измерить мощность?
Мы можем измерить произведенную работу,
и поделить ее на время.

Однажды заехал электромобиль. У него тахометра с оборотами как такового нету. Разьема ОБД нету. Но есть спидометр. Синхронизацию делали по спидометру (по соответствию скорости). Ну какая там точность?
В принципе момент можно нарисовать ЛЮБОЙ. Т.к. сделав неточность (специально завышенную или заниженную по величине синхронизацию) выставления оборотов-скорости ВЫ получите, что пожелаете!
А значит стендом мерится НЕ МОМЕНТ … а мощность
Есть мощность и момент КОЛЕСНЫЕ. В сумме с механическими потерями получается мощность МОТОРНАЯ.
Но что первично мерится МОМЕНТ или МОЩНОСТЬ? (переписываю ВАш вопрос).
Логика говорит, что момент первичен и уже потом пересчет в мощность. Однако наблюдая за работой колесного стенда картина выглядит наоборот…т.е.
— В большинстве случаев операторы делают синхранизацию скорости вращения роликов стенда с оборотами замеряемого ДВИГАТЕЛЯ. У стендов есть такая опция.
Измерение оборотов можно сделать и традиционными методами, скажем прищепкой индукции прикрепленной на высоковольтный провод или оптическим методом от вращения шкиваколенвала и т.п.
Однако в большинстве используют именно синхронизацию вращения роликов с оборотами ДВС.
Предположим мы вообще не делаем синхранизацию. Т.е. стенду быдут передаваться лживые обороты двигателя. Делая замер мотора фольцваген ПОЛО 1,6 литра (атмосферный), Вы получите примерно следующие цифры…
Что по мощности соответствует с реалиями, а по моменту нет! Точность выставления оборотов ДВС и скорости вращения роликов ВАЖНА. НЕ точность приводит и лживому расчету (преесчету) момента.
Но мощность ВСЕГДА верная! А момент может быть разный. Исходя из этого я утверждаю, что замеряется мощность, а момент ПЕРЕСЧИТЫВАЕТСЯ из данных мощности.
вот и реальная картинка замера без синхронизации оборотов двс и скорости роликов. forum.bratsk.org/attachme…entid=551184&d=1429023303

Все верно, стенду вообще ничего не нужно знать об измеряемом а/м (кроме типа привода), он измерит мощность на своих барабанах (или ступицах) и получим первичный график мощности от линейной скорости точки соприкосновения колеса и барабана.
А вот чтобы получить крутящий момент двигателя с потерями в трансмиссии и т.п., нужно уже знать обороты двигателя, т.е. привязку оборотов двигателя к скорости колеса.

Стенды измеряют МОЩНОСТЬ, причем с колёс. Моторная мощность и момент — расчётные величины.

А alexkolomna утверждает обратное)
Я видел.
Вот тебе много букв и много формул: www.drive2.ru/b/2914486/

Это один из текстов, который я почти на изусть знаю)))
А вот ключевые слова именно про инерционный стенд ( читата из текста по ссылке))))
Получается, что все нужное для определения мощности есть – момент (МОМЕНТ !) инерции известен, угловую скорость измеряет датчик вращения на оси, время может отсекать управляющий компьютер.
Так ты сам всё притягиваешь к «курица-яйцо». Стенд занимается измерением мощности с колёс, зная константы. Далее все остальные расчёты.
Момент первичен)
И только потом мощность.
Если не верно указать момент энерции стенда — все остальные расчеты пойдут прахом
Холивара не будет, мы разговариваем на разных языках, я лучше сольюсь.

Так ты сам всё притягиваешь к «курица-яйцо». Стенд занимается измерением мощности с колёс, зная константы. Далее все остальные расчёты.
Я всегда думал что стенд сделан по уму… а тут
Вот если бы на стенде стоял генератор и нагрузка: резистор не хилый. Расчетные и практические КПД генератора как константа и вот вам чистая мощность… ток умножаем на напряжение. Нагружаем мотор как хотим Этим резистором.
Да стенд немного усложняется зато киловат в киловат покажет а дальше можно считать и момент и все остальное относительно оборотов движка снятых с диагностического шнура.
Значительно проще и не менее точно посчитает инерционный стенд, с достаточной массой подвижной системы. И не нужно ничего выдумывать.
Предложенная тобой схема, на сколько мне известно, не используется, предположу, что проблемы будут с надежностью и температурной стабильностью. К тому же это не решает самой главной проблемы: стенд по прежнему продолжает измерять мощность с колёс.
Температурная стабильность и все дела все это фигня — печка на 200 кВт пару минут поработает. Даже на пару градусов температура в гараже не поднимится.
Сколес мериет мощность — а она так сильно отличается от моторной? потери на трансмиссии минимальные. Да и какая радость от мощности мотора если фактически используется мощность с колес.
Инерционный стенд в совокупности с колесами взаимодействует а инерционность колес как раз и вносит погрешность измерений. А при измерении тепловой мощности — никакие инерции не внесут погрешность.
Нравится мне, как за 20 минут, тыкая в кнопки клавиатуры, один человек ломает привычную всем картину.
Но не буду я и с тобой спорить. Собери правильный стенд и докажи всем производителям подобного оборудования, а за одно и нам, что твоя теория верна, а все вокруг заблуждались.
Ага мне тоже нравится за 20 минут разломать привычную картину )))
Я не говорю что все вокруг заблуждаются — просто надо понимать что он может измерить имея такой принцип работы.
Давно подумывал собрать сненд такого типа как описал выше, тока генератор дороговат получится.
С законами физики не поспоришь что тут сделать.
Ища инфу натыкаюсь на интересные факты. когда потери на трансмисии достигают 10%-20% — это мотор крутанул до 100 кВт и 10 кВт выделяется на коробке, подшибниках и тягах — 10кВт печка разогреет до красна карданы и тяги к гранатам.
Отсюда вывод что такого быть не может. т.к. никакого тепла не выделяется, по факту. 0,5% не более т.к. подшибники и смазка есть — да нагрев идет незначительный и то больше от колодок чем от потерь на трении всех частей.
Отсюда вывод что стенд измеряет мощность в совокупности с инерционностью колес и шестеренок. Если знать все массы и размеры и построить формулу то все встанет на свои места, а когда масса колеса и всего остального неизвестна то остается догадываться что он там мериет. и почему разница мощности мотора и мощности с колес такая разная получается. — а по факту ее тупо подгоняют имея массу, размер колеса и массу размер вала.
Отсюда и типа литье поставил (легкие диски и машина сразу на 5 лошадок стала мощнее) откуда двигатель становится мощнее если прикрутили диски другие. как вес диска влияет на мощность мотора — никак.
По факту разгон быстрее машине веселее — ДА т.к. инерционность колеса становится меньше и раскрутить мотору проще 3 кг колесо чем колесо в 15 кг. и примерный расчет что 1 кг массы колеса равносилен 40 кг груза в авто. — так и получается. т.к. затраты на кинетическую энергию меньше.
Никто не заморачивается из производителей стендов т.к. всех устраивает то что есть и пару валов на палку насадить и поставить датчик с компом куда проще чем делать настоящую измерительную систему. которую не надо калибровать под каждый авто и которая будет мерить ту мощность которая есть.
Выбор электродвигателя для промышленных применений
При выборе электродвигателя следует учитывать множество факторов, в том числе целевое назначение, требующиеся эксплуатационные и механические характеристики, а также предполагаемые внешние воздействия. Возможные варианты таковы: электродвигатель переменного тока, электродвигатель постоянного тока (рис. 1) или серводвигатель (шаговый электродвигатель). Конечный выбор в основном зависит от того, для какого промышленного изделия подбирается электродвигатель, и от наличия особых потребностей.

Рис. 1. Электродвигатели постоянного тока хорошо подходят для применения в изделиях с невысокой стоимостью, низкой частотой вращения ротора или постоянным крутящим моментом — например, таких, как этот ленточный транспортер
В зависимости от характера нагрузки это может быть электродвигатель с постоянной или переменной частотой вращения и мощностью. Крутящий момент и мощность определяются величиной нагрузки, необходимой частотой вращения, а также разгоном и торможением (особенно если они быстрые и/или частые). Кроме того, следует учитывать требования к регулированию частоты вращения и управлению положением ротора.
Типы нагрузок электродвигателей
Существует четыре типа нагрузок электродвигателей промышленной автоматики:
- переменная мощность и постоянный крутящий момент;
- переменный крутящий момент и постоянная мощность;
- переменные мощность и крутящий момент;
- управление положением ротора или регулирование крутящего момента.
К изделиям с переменной мощностью и постоянным крутящим моментом относятся транспортеры, краны и редукторные насосы. Крутящий момент у них постоянен, так как нагрузка не меняется. Требующаяся мощность может различаться в зависимости от типа изделия, поэтому хорошим выбором в этом случае будут электродвигатели постоянного тока с постоянной частотой вращения ротора.
Пример изделия с переменным крутящим моментом и постоянной мощностью — станок для перемотки бумаги. Скорость подачи материала постоянна, поэтому мощность не меняется. Нагрузка, однако, меняется по мере увеличения диаметра рулона. Для небольших систем такого рода хорошо подойдут электродвигатели постоянного тока или серводвигатели. Другой важный фактор в этом случае — энергия рекуперации, которую следует учитывать при выборе размера электродвигателя или метода регулирования мощности. В более крупных системах, возможно, целесообразнее будет использовать электродвигатели переменного тока с датчиками перемещений, регулирование с обратной связью и приводы, работающие в четырех квадрантах.
Для вентиляторов, центробежных насосов и мешалок требуются переменные мощность и крутящий момент. С увеличением частоты вращения ротора электродвигателя растет и мощность на нагрузке, а с нею требующиеся номинальная мощность и крутящий момент. При нагрузках такого типа начинает играть важную роль КПД двигателя. В подобных изделиях применяются электродвигатели переменного тока с инверторным управлением и частотно-регулируемые приводы.
В линейных приводах, которые должны обеспечивать точное перемещение во множество положений, требуется управление положением или регулирование крутящего момента ротора с малой погрешностью, а зачастую и обратная связь для проверки правильности положения. Для этих целей лучше всего подходят серводвигатели и шаговые двигатели, но наряду с ними часто применяются электродвигатели постоянного тока с обратной связью или электродвигатели переменного тока с инверторным управлением и датчиком перемещения, которые позволяют с малой погрешностью регулировать крутящий момент на металлургических и бумагоделательных линиях, а также в других аналогичных применениях.
Типы электродвигателей
Электродвигатели бывают двух основных разновидностей — переменного и постоянного тока, но они, в свою очередь, разделяются более чем на три десятка типов.
Несмотря на большое разнообразие, промышленные применения электродвигателей имеют между собой много общего, и под влиянием рыночных механизмов практический ассортимент типов электродвигателей в большинстве применений сузился. Шесть наиболее распространенных типов электродвигателей, которые можно использовать в подавляющем большинстве изделий, — это бесколлекторные и коллекторные электродвигатели постоянного тока, электродвигатели переменного тока с короткозамкнутым и фазным ротором, серводвигатели и шаговые электродвигатели. Прочие типы электродвигателей применяются только в изделиях специального назначения.
Три основных типа изделий по режиму работы электродвигателя
Три основных типа изделий по режиму работы электродвигателя — это изделия с постоянной частотой вращения, переменной частотой вращения и управлением положением (или регулированием крутящего момента) ротора. В различных изделиях промышленной автоматики требуются разные режимы, и набор вопросов, на который приходится отвечать при выборе электродвигателя, может также различаться (рис. 2).

Рис. 2. Асинхронные электродвигатели переменного тока часто выбирают для промышленных машин с вращательным движением рабочего органа
Например, если требующаяся максимальная частота вращения ротора меньше номинальной, может понадобиться редуктор. Возможно, для этой цели удастся подобрать более компактный электродвигатель, частота вращения ротора которого будет обеспечивать более высокий КПД. В Интернете есть большое количество информации о том, как выбирать электродвигатель по размеру, но пользователям необходимо принимать во внимание и другие факторы. Для расчета момента инерции нагрузки, крутящего момента и частоты вращения ротора требуется знать такие параметры, как полная масса и размер (радиус) нагрузки, а также коэффициент трения, потери на редукторе и цикл работы машины. Кроме того, во избежание перегрева электродвигателя необходимо учитывать изменение нагрузки, темп разгона или торможения и рабочий цикл изделия.
Определившись с типом и размером электродвигателя, пользователю нужно также учесть влияние внешних факторов и выбрать исполнение — например, открытое или в кожухе из нержавеющей стали для работы во влажной среде.
Выбор электродвигателя: три вопроса
Даже после того, как все эти решения приняты, пользователю необходимо ответить на следующие три вопроса, прежде чем сделать окончательный выбор.
Требуется ли постоянная частота вращения ротора?
В изделиях с постоянной частотой вращения ротора электродвигатель часто работает на приблизительно установленной частоте, а характеристики разгона и торможения роли практически не играют. В этом случае обычно применяется релейное управление с питанием непосредственно от сети. Цепи управления часто состоят из ответвления с предохранителем и контактором, устройства защиты от перегрузки при пуске и ручного регулятора электродвигателя или устройства плавного пуска.
Для изделий с постоянной частотой вращения ротора подходят электродвигатели переменного и постоянного тока. Электродвигатели постоянного тока обеспечивают номинальный крутящий момент при нулевой частоте вращения; этот тип электродвигателей очень популярен. Электродвигатели переменного тока — тоже хороший выбор, так как они характеризуются высоким коэффициентом мощности и нетребовательны в обслуживании. Серводвигатель или шаговый двигатель с высокими эксплуатационными характеристиками был бы излишним для простого изделия.
Требуется ли переменная частота вращения ротора?
Изделия с переменной частотой вращения ротора обычно требуют изменения линейной скорости и частоты вращения с малой погрешностью, а также четко определенных характеристик разгона и ускорения. Уменьшение частоты вращения ротора в таких изделиях, как вентиляторы и центробежные насосы, часто позволяет повысить КПД за счет согласования мощности с нагрузкой вместо работы на максимальной частоте с пропорциональным регулированием или демпфированием. Это важно для конвейерных систем, например линий бутылочного розлива.
Электродвигатели как переменного, так и постоянного тока с приводами соответствующего типа эффективно работают в изделиях с переменной частотой вращения ротора. На протяжении длительного времени привод с электродвигателем постоянного тока был единственным вариантом для изделий с переменной частотой вращения ротора, и компоненты для этой комбинации хорошо отработаны и проверены временем. Даже сейчас электродвигатели постоянного тока широко применяются в маломощных (менее 1 л. с.) изделиях этого типа, а также оказываются полезными в изделиях с низкой частотой вращения ротора, так как обеспечивают номинальный крутящий момент на низкой частоте вращения и постоянный крутящий момент в широком диапазоне частот.
Слабой стороной электродвигателей постоянного тока может быть обслуживание, так как во многих из них для коммутации используются щетки, которые со временем изнашиваются от контакта с подвижными частями. Бесколлекторные электродвигатели постоянного тока свободны от этого недостатка, но дороже в приобретении, а их ассортимент — уже.
Избавлены от этой проблемы и асихронные электродвигатели переменного тока, а вкупе с частотно-регулируемым приводом (рис. 3) они позволяют получить более высокий КПД в изделиях мощностью более 1 л. с., таких как вентиляторы и насосы. Некоторые типы приводов предусматривают обратную связь по положению. Если этого требует характер изделия, можно дополнить электродвигатель датчиком перемещений и выбрать привод, использующий сигнал от этого датчика для обратной связи. Такая конфигурация может обеспечить такое же регулирование частоты вращения ротора, как в серводвигателе.

Рис. 3. Сочетание электродвигателя постоянного тока с частотно-регулируемым приводом широко применяется для повышения КПД и эффективно работает в разнообразных изделиях с переменной частой вращения ротора
Требуется ли управление положением ротора?
Управление положением ротора электродвигателя с малой погрешностью обеспечивается путем непрерывной проверки его положения в процессе вращения. В изделиях, где требуется, например, задавать положение линейного привода, можно применять шаговый электродвигатель с обратной связью или без таковой, а также серводвигатель со встроенной обратной связью.
Шаговый электродвигатель предназначен для перемещения в заданное положение на умеренной скорости с последующим сохранением этого положения. Шаговый электродвигатель без обратной связи по положению обеспечивает весьма точное управление положением ротора, если правильно выбрать его размер, а также перемещение на точно заданное число шагов (если только он не столкнется с изменением нагрузки, превышающим его возможности).
С ростом требуемой частоты вращения и динамических нагрузок шаговый привод без обратной связи может уже не обеспечить нужных характеристик системы, и тогда понадобится шаговый привод с обратной связью или сервопривод.
Система с обратной связью обеспечивает точное высокоскоростное перемещение по заданному профилю и регулирование положения ротора. Серводвигатель обеспечивает больший крутящий момент на высоких частотах вращения в сравнении с шаговым электродвигателем, а также эффективнее работает в изделиях, характеризующихся высокими динамическими нагрузками или сложным характером перемещения.
Для быстрого и/или резкого перемещения с малым перерегулированием по положению момент инерции нагрузки должен быть как можно лучше согласован с моментом инерции серводвигателя. Рассогласование в пропорции до 10:1 приемлемо в некоторых применениях, но оптимальным является согласование 1:1.
Уменьшение частоты вращения посредством редуктора — оптимальный способ решить проблему рассогласования моментов инерции, поскольку момент инерции нагрузки обратно пропорционален квадрату передаточного отношения редуктора. При этом в расчетах необходимо учитывать момент инерции редуктора.
Знание особенностей изделия и электродвигателя
Производители предлагают широкий ассортимент электродвигателей для промышленных применений. Шаговые электродвигатели, серводвигатели, электродвигатели переменного и постоянного тока пригодны для использования в большинстве типов изделий промышленной автоматики, но оптимальный выбор электродвигателя зависит от характера изделия. Пользователям следует выбирать электродвигатель для своего изделия, учитывая, какой требуется режим работы — постоянная частота вращения, переменная частота вращения или управление положением ротора, — и в тесном взаимодействии с поставщиками электродвигателя и привода.