Снятие рабочих характеристик трехфазного асинхронного электродвигателя с короткозамкнутым ротором
Снятие рабочих характеристик трехфазного асинхронного электродвигателя с короткозамкнутым ротором
лабораторная работа 3
Снятие рабочих характеристик трехфазного асинхронного электродвигателя с короткозамкнутым ротором
Цель работы. 1. Изучить устройство трехфазного асинхронного двигателя с короткозамкнутым ротором.
2. Испытать асинхронный двигатель с помощью электро-магнитного тормоза.
3. Построить по опытным данным рабочие характеристики асинхронного двигателя.
Общие теоретические положения.
Асинхронный двигатель трехфазного тока представляет собой электрическую машину, служащую для преобразования электрической энергии трехфазного тока в механическую.
Двигатель имеет две основные части : неподвижную — статор
Статор состоит из чугунного, стального или алюминиевого корпуса, внутри которого находится полый цилиндр, собранный из тонких изолированных друг от друга листов электротехнической стали. На внутренней поверхности цилиндра имеются пазы, в которых размещается трехфазная обмотка статора, состоящая из трех одинаковых частей, называемых фазами. Выводы начала и конца одной фазы сдвинуты в пространстве относительно аналогичных выводов другой фазы иа 120°.
На корпусе двигателя имеется панель с зажимами, с помощью которых обмотка присоединяется к трехфазной сети. К каждому зажиму подключен соответствующий вывод обмотки. Для зажимов приняты следующие обозначения: зажимы, к которым подключены начала обмоток, обозначают С1 — С3; зажимы, к которым подсоединены концы обмоток, — С4 — С6
Обмотки двигателей малой и средней мощности изготовляют на напряжения 380/220 и 220/127 В. Напряжение, указанное в числителе, соответствует соединению обмоток звездой, в знаменателе—треугольником. Таким образом, один и тот же двигатель при соответствующей схеме соединения его обмоток может быть включен в сеть на любое указанное в паспорте напряжение.
Ротор представляет собой цилиндр, собранный, так же как и сердечник статора, из отдельных листов электротехнической стали, надежно укреплен на валу машины и имеет в пазах, расположенных вблизи его поверхности, короткозамкнутую обмотку.
Подключим обмотку статора к сети трехфазного переменного тока (рис. 10.1).
Внутри статора возникает магнитное поле, вращающееся с частотой
где f — частота токов в обмотке статора;
р— число пар полюсов обмотки статора.
Магнитные линии поля пересекают обмотку неподвижного ротора и индуцируют в ней ЭДС. Под действием ЭДС в обмотке ротора протекает ток. Ток ротора, взаимодействуя с вращающимся магнитным полем, создает вращающий момент, под действием которого ротор начинает вращаться в ту же сторону, что и поле с частотой
где s — скольжение, определяемое по формуле: s = (n 0 — n)/n 0
При работе электродвигателя без нагрузки (холостой ход) скольжение очень мало. С увеличением нагрузки на валу двигателя частота вращения ротора уменьшается, а скольжение увеличивается. Скольжение асинхронного двигателя в зависимости от нагрузки меняется незначительно (1—6 %). Чем больше мощность двигателя, тем меньше его скольжение. Частота вращения ротора может быть измерена с помощью тахометра. Для изменения направления вращения (реверсирование) асинхронного двигателя следует поменять местами два любых провода из трех, идущих к обмоткам статора двигателя.
Зависимость между вращающим моментом M и скольжением s называют механической характеристикой (рис. 10.2). В начальный момент пуска s =1 и п = 0, вращающий пусковой момент двигателя относительно невелик. При некотором скольжении, называемом критическим, вращающий момент двигателя максимальный. В режиме холостого хода, когда двигатель не нагружен, а механическими потерями (на трение) можно пренебречь, s = С. Работе двигателя с номинальной нагрузкой соответствует точка A на механической ха-
Рис 10.1. Схема присоединения трехфазного асинхронного двигателя с корот-козамкнутым ротором к питающей сети
Рис. 10.2. График зависимости вращающего момента асинхронного двигателя от скольжения
Рис. 10.3. Характеристики асинхронного двигателя:
а — механическая; б — рабочие
рактеристике. При скольжении S ном двигатель развивает номинальный момент, значение которого (Н-м) вычисляют по формуле:
М ном = 9550 Р 2ном / n ном
где Р 2ном — номинальная мощность двигателя, кВт;
n ном — номинальная частота вращения ротора, мин -1
Свойства асинхронного двигателя определяют по его механической характеристике п = f (М) (рис. 10.3, а) и по рабочим характеристикам п = f (Р 2 ),
s = f(Рг), М = f (Р 2 ), I = f(Р 2 ), cos = f (Р 2 ), — f(Р 2 ) при напряжении U = const и частоте тока I = const (рис. 10.3, б), где М и Р — соответственно момент и мощность на валу двигателя.
Прямой пуск асинхронного двигателя с короткозамкнутым ротором можно производить включением рубильника (магнитного пускателя) и т.п. (см. рис. 10.1). При прямом пуске на двигатель подается полное напряжение сети. При таком способе пуска возникают большие пусковые токи, в 2—7 раз превышающие номинальные токи двигателей. Однако в этом случае на валу дви-
Рис. 10.4. Устройство электромагнитного (индукционного) тормоза:
1 — электромагниты; 2 — стальной диск; 3 — груз; 4—шкала: 5 — стрелка; 6 — вал испытуемой машины
Рис. 10.5. Схема для исследования трехфазного асинхронного двигателя с короткозамкнутым ротором
гателя развивается начальный вращающий момент М п , составляющий 1,2— 2,2 номинального момента М ном , что достаточно для разгона большинства устройств, пускаемых без нагрузок.
Трехфазный асинхронный двигатель с короткозамкнутым ротором характеризуется такими номинальными величинами:
мощностью Р 2НОМ на валу,
линейным напряжением U ном ,
линейным током I ном .
типом соединения фаз статора,
частотой переменного тока f ном ,
частотой вращения ротора n ном ,
коэффициентом мощности cos ном
КПД ном — которые приведены на табличке машины.
Для нагрузки электродвигателей широко применяют электромагнитные
(индукционные) тормозные устройства (рис. 10.4, где 1— электромагниты,
2 — стальной диск, 3 — груз, 4— шкала, 5 — стрелка, 6— вал испыту
емой машины). При некотором угле поворота груза со стрелкой вращающий и
противодействующий моменты уравновешиваются и по заранее проградуиро-
ванной шкале в ньютон-метрах определяют вращающий момент, развиваемый
на валу электродвигателя.
Мощность Р 2 на валу (кВт) определяется по формуле: Р 2 = М n / 9550
Коэффициент мощности вычисляют по формуле: cos = Р 1 / 3 U I
КПД определяют по формуле: = Р 2 / Р 1,
где Р 1 — активная мощность, потребляемая двигателем электрической энергии из трехфазной сети;
U и I —линейные напряжения и ток.
Приборы и оборудование:
источники- питания (трехфазная сеть переменного тока; сеть постоянного тока),
трехфазный асинхронный двигатель с короткозамкнутым ротором,
амперметр и вольтметр электромагнитной системы,
двухэлементный ваттметр ферродинамической системы,
трехполюсный и двухполюсный автоматические выключатели,
Порядок выполнения работы.
Ознакомиться с приборами, аппаратурой и оборудованием, предназ-наченными для выполнения лабораторной работы, записать их технические характеристики.
Собрать электрическую схему для исследования асинхронного двига-
теля (рис. 10.5) и представить ее для проверки преподавателю.
Произвести пуск двигателя без нагрузки на его валу (холостой ход).
Показания всех приборов записать в табл. 10.1
Постепенно нагружать двигатель с помощью электромагнитного тор-
моза, для этого ступенями изменять ток в обмотках электромагнитов тормоза с помощью делителя напряжения R. Записать показания всех приборов в табл. 10.1 для 6—7 различных случаев возрастающей нагрузки.
5. Произвести необходимые расчеты, результаты записать в табл. 10.1.
Используя полученные результаты, построить в одной системе координат рабочие характеристики: п = f (Р 2 ), s = f(Рг), М = f (Р 2 ), I = f(Р 2 ), cos = f (Р 2 ), — f(Р 2 )
Составить отчет по результатам выполненной работы.
Онлайн журнал электрика
Статьи по электроремонту и электромонтажу
- Справочник электрика
- Бытовые электроприборы
- Библиотека электрика
- Инструмент электрика
- Квалификационные характеристики
- Книги электрика
- Полезные советы электрику
- Электричество для чайников
- Справочник электромонтажника
- КИП и А
- Полезная информация
- Полезные советы
- Пусконаладочные работы
- Основы электротехники
- Провода и кабели
- Программа профессионального обучения
- Ремонт в доме
- Экономия электроэнергии
- Учёт электроэнергии
- Электрика на производстве
- Ремонт электрооборудования
- Трансформаторы и электрические машины
- Уроки электротехники
- Электрические аппараты
- Эксплуатация электрооборудования
- Электромонтажные работы
- Электрические схемы
- Электрические измерения
- Электрическое освещение
- Электробезопасность
- Электроснабжение
- Электротехнические материалы
- Электротехнические устройства
- Электротехнологические установки
Рабочие характеристики асинхронного двигателя
 Рабочие свойства асинхронного мотора представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Рабочие свойства асинхронного мотора представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Высокоскоростная черта n2 = f(P2). Частота вращения ротора асинхронного мотора n2 = n1(1 — s).
Скольжение s = Pэ2/Pэм, т. е. скольжение асинхронного мотора, а как следует, и его частота вращения определяются отношением электронных утрат в роторе к электрической мощности. Пренебрегая электронными потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а потому s ≈ 0 и n20 ≈ n1.
По мере роста нагрузки на валу асинхронного мотора отношение s = Pэ2/Pэм вырастает, достигая значений 0,01 — 0,08 при номинальной нагрузке. В согласовании с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Но при увеличении активного сопротивления ротора мотора r2′ угол наклона этой кривой возрастает. В данном случае конфигурации частоты асинхронного мотора n2 при колебаниях нагрузки Р2 растут. Разъясняется это тем, что с повышением r2′ растут электронные утраты в роторе.

Рис. 1. Рабочие свойства асинхронного мотора мотора
Зависимость М2 =f(P2). Зависимость полезного момента на валу асинхронного мотора М2 от полезной мощности Р2 определяется выражением M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2,
где Р2 — нужная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном движке с повышением нагрузки Р2 частота вращения ротора миниатюризируется, а потому нужный момент на валу М2 с повышением нагрузки растет не сколько резвее нагрузки, а как следует, график М2 =f (P2) имеет криволинейный вид.

Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного мотора I1 имеет реактивную (индуктивную) составляющую, нужную для сотворения магнитного поля в статоре, коэффициент мощности асинхронных движков меньше единицы. Меньшее значение коэффициента мощности соответствует режиму холостого хода. Разъясняется это тем, что ток холостого хода электродвигателя I0 при хоть какой нагрузке остается фактически постоянным. Потому при малых нагрузках мотора ток статора невелик и в значимой части является реактивным (I1 ≈ I0). В итоге сдвиг по фазе тока статора относительно напряжения выходит значимым (φ1 ≈ φ0), только немногим меньше 90° (рис. 2).
Коэффициент мощности асинхронных движков в режиме холостого хода обычно не превосходит 0,2. При увеличении нагрузки на валу мотора вырастает активная составляющая тока I1 и коэффициент мощности растет, достигая большего значения (0,80 — 0,90) при нагрузке, близкой к номинальной. Предстоящее повышение нагрузки на валу мотора сопровождается уменьшением cos φ1 что разъясняется возрастанием индуктивного сопротивления ротора (x2s) за счет роста скольжения, а как следует, и частоты тока в роторе.
В целях увеличения коэффициента мощности асинхронных движков очень принципиально, чтоб движок работал всегда либо по последней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить только при правильном выборе мощности мотора. Если же движок работает значительную часть времени недогруженным, то для увеличения cos φ1, целенаправлено подводимое к движку напряжение U1 уменьшить. К примеру, в движках, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При всем этом магнитный поток статора, а как следует, и намагничивающий ток уменьшаются приблизительно в раз. Не считая того, активная составляющая тока статора несколько возрастает. Все это содействует увеличению коэффициента мощности мотора.
На рис. 3 представлены графики зависимости cos φ1, асинхронного мотора от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).

Рис. 3. Зависимость cos φ1,от нагрузки при соединении обмотки статора мотора звездой (1) и треугольником (2)
ЛАБОРАТОРНАЯ РАБОТА № 13. Исследование трехфазного асинхронного двигателя




![]()
![]()
![]()
![]()
Исследование трехфазного асинхронного двигателя
С фазным ротором
Изучитьконструкции трехфазного асинхронного двигателя с фазным ротором. Снять механическую и рабочие характеристики двигателя.
1.Ознакомиться с устройством трехфазного асинхронного двигателя с фазным ротором, записать его паспортные данные, а также данные измерительных приборов.
1.Собрать схему лабораторной установки согласно рис.13.3
3.Снять механическую характеристику двигателя.
4.Используя результаты опыта, построить график зависимости скорости вращения ротора от момента на валу.
5.Собрать схему лабораторной установки согласно рис.13.4
6.Записать в таблицу необходимые измерения.
Основные теоретические положения
Механическая характеристика – это зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 13.1, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения магнитного поля n1 (скольжение sном = 2– 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая
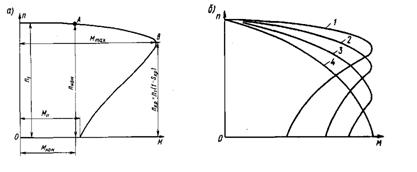
Рисунок 13.1 — Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
на рис. 13.1, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент Mmax двигатель развивает при некоторое скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В). Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть.
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 13.1,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
Рабочими характеристикамиасинхронного двигателя с фазным роторомназывают графические зависимости частоты вращения n2 (или скольжения s),момента на валу М2 , тока статора I1, коэффициента полезного действия η и cos φ1 от полезной мощности Р2 при U1 = constиf1 = const. Их определяют экспериментально или путем расчета по схеме замещения или круговой диаграмме.
По рабочим характеристикам судят об основных свойствах двигателя. В частности, по ним может быть построена механическая характеристика n2 = f (М). Рабочие характеристики двигателей малой мощности можно снять методом непосредственной нагрузки с помощью электромагнитного тормоза.
Для двигателей средней и большой мощности рабочие характеристикиопределяют посредством круговой диаграммы. Примерный вид рабочиххарактеристикасинхронного двигателя приведен на рис. 13.2
Рисунок 13.2 — Рабочие характеристики асинхронного двигателя.

Поведение рабочих характеристик объясняется следующим образом.Ток I1, потребляемый двигателем из сети, неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе cosϕ1 мал и ток имеет большую реактивную составляющую. При малых нагрузках на валу двигателя активная составляющая статора меньше реактивной составляющей, поэтому активная составляющая тока незначительно влияет на ток I1, определяющийся в основном реактивной составляющей. При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает большое изменение тока I1.
Вращающий момент двигателя (M = c ΦI 2 cosϕ2 ) также почти пропорционален нагрузке, но при больших нагрузках линейность графикаM = f (P2 ) несколько нарушается за счет уменьшения скорости вращения двигателя.
Указания по проведению эксперимента
Убедитесь, что устройства, используемые в эксперименте, отключены от сети электропитания.
Соберите электрическую схему соединений тепловой защиты машины переменного тока.
Соедините гнезда защитного заземления »  » устройств, используемых в эксперименте, с гнездом «РЕ» трехфазного источника питания G1.
» устройств, используемых в эксперименте, с гнездом «РЕ» трехфазного источника питания G1.
Соедините аппаратуру в соответствии с электрической схемой соединений.
Переключатели режима работы источника G2 и выключателя А6 установите в положение «РУЧН.».
Установите суммарное сопротивление каждой фазы реостата А9, например, 20 Ом.
Регулировочную рукоятку источника G2 поверните до упора против часовой стрелки, а регулировочные рукоятки активной нагрузки А10 — по часовой стрелке.
Установите переключателем в трехфазной трансформаторной группе А2 номинальные напряжения вторичных обмоток трансформаторов, например, 127 В.
Включите выключатели «СЕТЬ» блоков, задействованных в эксперименте.
Активизируйте мультиметры блока Р1, задействованные в эксперименте.
Включите источник G1. О наличии напряжений фаз на его выходе должны сигнализировать светящиеся лампочки.
Пустите двигатель М1 нажатием кнопки «ВКЛ.» выключателя А6.
Нажмите кнопку «ВКЛ.» источника G2.
Вращая регулировочную рукоятку источника G2 , изменяйте ток I статорной обмотки двигателя М1 и заносите показания амперметра Р1.1 (ток I), ваттметра измерителя мощностей Р2 (активная мощность Pфазы двигателя М1) и указателя Р3 (частота вращения n двигателя М1) в таблицу 13.1
| I, А |
| P, Вт |
| n, мин — 1 |
По завершении эксперимента отключите выключатель А6 и источник G1.
Выключите выключатели «СЕТЬ» блоков, задействованных в эксперименте.
Вычислите электромагнитный момент М двигателя М1 для каждого значения тока Iиз табл. 13.1.1. по формуле
 H . м
H . м
и занесите его в таблицу 13.1.2.
Таблица 13.2.
| М, Н×м |
| n, мин — 1 |
Используя данные таблицы 13.2 постройте искомую механическую характеристику n=f(M)трехфазного асинхронного двигателя с фазным ротором.
Убедитесь, что устройства, используемые в эксперименте, отключены от сети электропитания.
Соберите электрическую схему соединений тепловой защиты машины переменного тока.
Соедините гнезда защитного заземления » » устройств, используемых в эксперименте, с гнездом «РЕ» трехфазного источника питания G1.
Соедините аппаратуру в соответствии с электрической схемой соединений.
Переключатели режима работы источника G2 и выключателя А6 установите в положение «РУЧН.».
Установите суммарное сопротивление каждой фазы реостата А9, например, 20 Ом.
Регулировочную рукоятку источника G2 поверните до упора против часовой стрелки, а регулировочные рукоятки активной нагрузки А10 — по часовой стрелке.
Установите переключателем в трехфазной трансформаторной группе А2 номинальные напряжения вторичных обмоток трансформаторов, например, 127 В.
Включите выключатели «СЕТЬ» блоков, задействованных в эксперименте.
Активизируйте мультиметры блока Р1, задействованные в эксперименте.
Включите источник G1. О наличии напряжений фаз на его выходе должны сигнализировать светящиеся лампочки.
Пустите двигатель М1 нажатием кнопки «ВКЛ.» выключателя А6.
Нажмите кнопку «ВКЛ.» источника G2.
Вращая регулировочную рукоятку источника G2 , изменяйте ток I статорной обмотки двигателя М1 и заносите показания амперметра Р1.1 (ток I), ваттметра и варметра измерителя мощностей Р2 (активная P11и реактивная Q11мощности фазы двигателя М1), указателя Р3 (частота вращения n двигателя М1), амперметра Р1.2 и вольтметра Р1.3 ( ток Iа и напряжение Uа якорной обмотки генератора G4) в таблицу 13.3.
| I, A |
| P11, Вт |
| Q11, В×Ар |
| n, мин — 1 |
| Ia,A |
| Uа, В |
По завершении эксперимента отключите выключатель А6 и источник G1.
Выключите выключатели «СЕТЬ» блоков, задействованных в эксперименте.
Используя данные таблицы 13.3, вычислите для каждого значения тока I значения, полезной активной мощности Р2, полной потребляемой из сети активной мощности P1, полезного механического момента М, коэффициента мощности cosj, скольжения s и коэффициента полезного действия h асинхронного двигателя с короткозамкнутым / фазным ротором по формулам
и занесите полученные результаты в таблицу 13.4.
Таблица 13.4.
| I, A |
| P2, Вт |
| P1, Вт |
| М, Н×м |
| cos j |
| s, % |
| h, % |
Используя данные таблицы 13.4 постройте искомые рабочие характеристики I=f(P2), P1=f(P2), s=f(P2), h=f(P2), cosj=f(P2), M=f(P2)трехфазного асинхронного двигателя с фазным ротором.
Контрольные вопросы
1) В чём особенность устройства асинхронных двигателей с фазным ротором?
2) Каково назначение пускового реостата в цепи ротора?
3) Сформулируйте достоинства и недостатки асинхронного двигателя с фазным ротором.
4) Как влияют на вид механической характеристики напряжение сети и сопротивление ротора?
5) Какие существуют способы регулирования скорости асинхронного двигателя с фазным ротором?
6) Почему способ регулирования частоты вращения двигателя изменением скольжения не экономичен?
7) Какие графики называются рабочими характеристиками трехфазных двигателей?
Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя (рис. 13.7) представляют собой графически выраженные зависимости частоты
вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя
Скольжение по (13.5)
т. е. скольжение двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности Рэм. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1. По мере увеличения нагрузки на валу

Рис. 13.7. Рабочие характеристики асинхронного двигателя
двигателя отношение (13.24) растет, достигая значений 0,01—0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора r2‘ угол наклона этой кривой увеличивается. В этом случае изменения частоты вращения n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2‘ возрастают электрические потери в роторе [см. (13.3)].
Зависимость М2 =f(P2). Зависимость полезного момента на валу двигателя М2 от полезной мощности Р2 определяется выражением
где Р2 — полезная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 =f (P2) имеет криволинейный вид.

Рис. 13.8. Векторная диаграмма асинхронного
двигателя при небольшой нагрузке
Зависимость cosφ1 = f (P2). В связи с тем что ток статора I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму х.х. Объясняется это тем, что ток х.х. I при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I). В результате сдвиг по фазе тока статора  , относительно напряжения
, относительно напряжения  , получается значительным (φ1 ≈ φ), лишь немногим меньше 90° (рис. 13.8). Коэффициент мощности асинхронных двигателей в режиме х.х. обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и
, получается значительным (φ1 ≈ φ), лишь немногим меньше 90° (рис. 13.8). Коэффициент мощности асинхронных двигателей в режиме х.х. обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и

Рис. 13.9. Зависимость cos φ1,от нагрузки при
соединении обмотки статора звездой (1) и треугольником (2)
коэффициент мощности возрастает, достигая наибольшего значения (0,80—0,90) при нагрузке, близкой к номинальной. Дальнейшее увелиичение нагрузки сопровождается уменьшением cosφ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cosφ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в  раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. На рис. 13.9
раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. На рис. 13.9
представлены графики зависимости cosφ1, асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).