Типы шаговых двигателей
Типы шаговых двигателей
Существуют многочисленные типы систем управления движения, основанные на коллекторных двигателях постоянного тока, серводвигателях, шаговых двигателях и пр. Рассмотрим управление движением при помощи шаговых двигателей.
Теоретически, шаговый двигатель очень прост. В нем нет щеток или контактных колец. В целом — это синхронный двигатель, в котором магнитное поле статора вращаются с помощью электроники, а в роторе находятся постоянные магниты. Шаговый двигатель превращает управляющие импульсы в механическое вращение ротора. Преимущество шаговых двигателей — низкая стоимость, высокая надежность, высокий крутящий момент в области низких скоростей и простой конструкции, которая функционирует практически в любой окружающей среде. Главные неудобства в использовании шаговых двигателей — эффект резонанса, часто проявляющийся на низких скоростях и падение крутящего момента на высоких скоростях.
Система управления, основанная на использовании шагового двигателя:
Indexer, он же контроллер — микропроцессор, генерирующий импульс «ШАГ» и «НАПРАВЛЕНИЕ», по сигналам, получаемым от пользователя. Обычно существует множество других сложных функций, возлагаемых на микропроцессор.
Driver, он же силовая часть — преобразователь сигналов контроллера в силовые управляющие импульсы, необходимые для вращения ротора. Есть много различных типов драйверов с различными величинами силы тока и формами управляющих импульсов. Не все драйверы являются подходящими, для различных двигателей. Правильный выбор драйвера является очень важным при проектировании системы управления.
Существуют три типа шаговых двигателей:
- с переменным магнитным сопротивлением
- с постоянными магнитами
- гибридные
В двигателях с переменным магнитным сопротивлением не используются постоянные магниты.
Как следствие, у двигателя отсутствует так называемый «detent torque» — стопорный момент. Этот тип конструкции не обеспечивает высокого крутящего момента.
У двигателей с постоянными магнитами величина шага редко бывает менее 7,5°, что связано с конструктивными особенностями его ротора.
Главным достоинством двигателей с постоянными магнитами является их низкая цена, а недостатком — низкие скорости вращения.
В гибридных двигателях многополюсный статор и ротор с постоянными магнитами позволяют, получить значительный крутящий момент (до 300 кгс*см) и малую величину шага (1,8° и менее).
Стопорный момент гибридных шаговых двигателей обычно составляет 10% от величины статического синхронизирующего момента.
По способу питания шаговые двигатели можно разделить на униполярные и биполярные.
Приведенные на рисунке схемы можно использовать как биполярные, так и как униполярные. В случае если отводы от средних точек обмоток соединены между собой внутри двигателя и пользователю доступны только пять выводов, что бывает очень редко, двигатель можно использовать только как униполярный.
Дополнительные рекомендации по выбору шагового двигателя здесь.
Подпишитесь на наши новости
Получайте первыми актуальную информацию от ООО «Электропривод»
Шаговые и моментные двигатели
1. Принцип действия шаговых двигателей
В схемах автоматики, телемеханики и вычислительной техники наряду с автоматическими системами непрерывного действия, которые выполняются с помощью рассмотренных выше обычных двигателей, широко применяются системы дискретного (импульсного) действия. В таких системах используются специальные исполнительные двигатели, которые получили название шаговых.
Шаговые двигатели — это электромеханические устройства, которые преобразуют электрические импульсы напряжения управления в дискретные (скачкообразные) угловые и линейные перемещения ротора с возможной его фиксацией в нужных положениях.
Первые шаговые двигатели изготовлялись в виде электромагнита, приводящего во вращение храповое колесо (рис.41), которое за одно включение электромагнита под напряжение (за один такт) перемещалось на вполне определенный угол — шаг, величина которого определяется величиной зубцового шага храпового колеса.
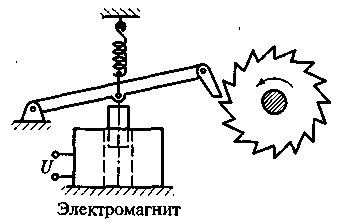
Рис.41. Шаговый двигатель с электромагнитом и храповиком
Для обеспечения реверса на валу двигателя устанавливалось два храповых колеса, повернутых на 180° друг относительно друга, и двигатель снабжался двумя электромагнитами. Несмотря на наличие ряда недостатков храповых шаговых двигателей, они и в настоящее время находят довольно широкое применение в схемах автоматики.
2. Шаговые двигатели с пассивным ротором
Применяемые в настоящее время шаговые двигатели в большинстве являются многофазными и многополюсными синхронными электрическими машинами. В отличие от обычных синхронных двигателей роторы шаговых двигателей не имеют пусковой короткозамкнутой обмотки, что объясняется частотным (а не асинхронным) их пуском. Роторы двигателей могут быть возбужденными (активными) и невозбужденными (пассивными).
На рис. 19.2 изображены схемы работы m-фазного шагового двигателя. Для упрощения анализа физических процессов рассмотрим работу этого двигателя с простейшим невозбужденным ротором, имеющим два полюса.
Питание обмоток статора может быть либо однополярным, либо двухполярным. При однополярном питании напряжение изменяется от нуля до +U; при двухполярном — от +U до -U.
Современные электронные коммутаторы могут обеспечивать питание обмоток статора либо порознь, либо группами в различных сочетаниях. Каждому состоянию — такту коммутации, число которых зависит от способов включения обмоток, соответствует вполне определенные величина и направление вектора F результирующей МДС двигателя, а следовательно, и вполне определенное положение ротора в пространстве. Так, если обмотки двигателя питать поочередно (1, 2, 3, . m) однополярными импульсами, то ротор двигателя будет иметь m устойчивых положений, которые совпадают с осями обмоток (см. рис.42, а). На практике с целью увеличения результирующей МДС статора, а следовательно, и магнитного потока, а также синхронизирующего момента обычно одновременно питают две, три и большее число обмоток. При этом ротор двигателя при холостом ходе занимает положения, в которых его ось совпадает с результирующим вектором МДС.
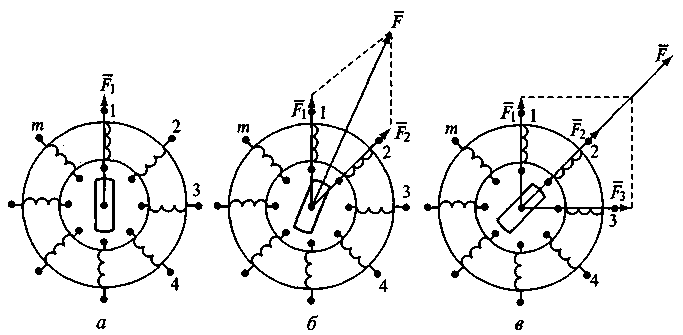
Рис.42. Схемы работы m -фазного шагового двигателя:
а — поочередное питание однополярными импульсами; б — питание четного числа обмоток; в — питание нечетного числа обмоток
В том случае, когда питается четное число обмоток, положения результатирующего вектора МДС и ненагруженного ротора совпадают с линией, проходящей между двумя средними обмотками (см. рис.42, б). В том случае, когда питается нечетное число обмоток, устойчивые положения ротора совпадают с осью средней обмотки (см. рис.42, в). Таким образом, в обоих случаях (при четном и нечетном числе питаемых обмоток) ротор двигателя будет иметь т устойчивых положений. Однако соседние положения в этих случаях будут смещены на угол 2π/(2m) = π /m.
Если поочередно включать то четное, то нечетное число обмоток (например, 1 — 2, 1—2—3, 2 — 3,
2 — 3 — 4 и т.д.), то число устойчивых положений ротора п увеличится вдвое: n = 2m.
На практике управление двигателя, при котором обмотки включаются поочередно равными группами по две, три и т.д., называют симметричным. Поочередное включение неравных групп обмоток называют несимметричным управлением.
Кроме однополярного и двухполярного, симметричного и несимметричного способов управления шаговыми двигателями различают еще потенциальный и импульсный способы управления.
При потенциальном управлении напряжения на обмотках изменяются только в момент поступления управляющего сигнала — команды. При отсутствии последующего сигнала управления одна обмотка или группа обмоток, возбужденные предшествующим сигналом, остаются под напряжением и ротор занимает вполне определенное фиксированное положение.
При импульсном управлении любая обмотка (или группа обмоток), возбужденная сигналом — импульсом управления, по истечении некоторого времени, определяемого длительностью импульса, автоматически обесточивается. Фиксация положения ротора в период паузы между импульсами обеспечивается либо внутренним реактивным моментом (при наличии активного ротора), либо специальными магнитными, электромагнитными или механическими фиксирующими устройствами.
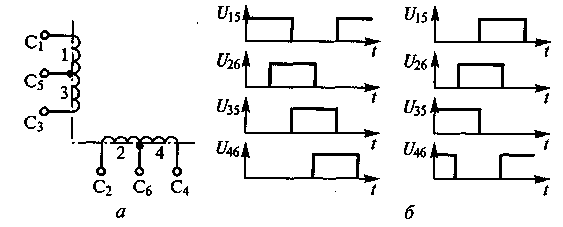
Рис.43. Схема обмоток (а) и порядок коммутации (б) шагового двигателя типа ШД-2-1
На рис.43 показан принцип работы двухфазного шагового двигателя типа ШД-2-1. Обмотки этого двигателя имеют выводы средних точек, что приводит к их расщеплению на две полуфазы и превращает двигатель из двухфазного в четырехфазный. В отличие от двигателей с обычной двухфазной обмоткой, управление которыми должно осуществляться разнополярными импульсами, управление рассматриваемого двигателя осуществляется однополярными импульсами, что значительно упрощает коммутатор.
.3. Шаговые двигатели с активным ротором
Шаговые двигатели по существу являются синхронными двигателями, работающими в несколько иных (необычных) режимах. Последнее накладывает отпечаток на их конструктивное исполнение. В отличие от обычных синхронных двигателей они для обеспечения нужных динамических и статических характеристик имеют минимальные диаметры ротора, выполняются без пусковой короткозамкнутой обмотки, рассчитываются на большие электромагнитные нагрузки и т. п. В настоящее время известно множество конструктивных форм шаговых двигателей.
По числу фаз (обмоток управления) шаговые двигатели можно разделить на однофазные, двухфазные и многофазные.
По типу роторов — на активные (возбужденные) и пассивные (невозбужденные). Активные шаговые двигатели можно в свою очередь разделить на двигатели с постоянными магнитами (магнитоэлектрические) и двигатели с обмотками возбуждения (электромагнитные), а пассивные — на индукторные и реактивные.
По числу пакетов стали магнитопровода двигатели делятся на однопакетные, двухпакетные и многопакетные.
По способу фиксации ротора при обесточенных обмотках управления различают двигатели с внутренней и внешней фиксацией.
Шаговые двигатели можно разделить на группы также по типу магнитной системы и другим признакам.
Описание всех конструкций шаговых двигателей, применяемых в настоящее время на практике, весьма затруднительно, поэтому далее рассматриваются лишь некоторые наиболее типичные из них.
Однопакетные шаговые двигатели с активным ротором по своей конструкции (рис.44) мало отличаются от обычных синхронных двигателей. Их роторы чаще возбуждаются постоянными магнитами, реже — обмоткой возбуждения постоянного тока. Роторы имеют явно выраженные полюсы. С целью уменьшения шага их изготовляют многополюсными в виде магнитов-звездочек. Малые диаметры не позволяют значительно увеличить число полюсов, что приводит к сравнительно крупному шагу таких двигателей, который обычно находится в пределах от 15 до 90°. Уменьшение шага у этих двигателей возможно лишь за счет увеличения числа фаз статора и тактов коммутации. Стремление уменьшить шаг приводит к тому, что обмотки статора обычно выполняются с минимальным числом пазов, приходящихся на полюс и фазу q = 1.
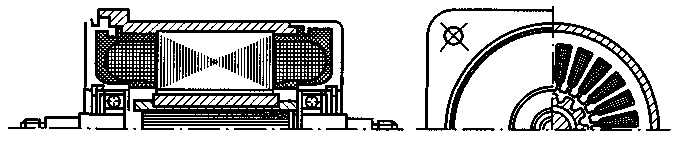
Рис.44. Шаговый двигатель типа ЩЦ-2 с активным ротором в виде магнита-звездочки
Двигатели, от которых не требуется фиксации ротора в обесточенном состоянии, обычно изготовляются со скосом пазов статора. Последнее способствует устранению зубцовых гармоник в кривой момента М=f(θ).
При необходимости фиксации ротора в обесточенном состоянии статоры изготовляются без скоса пазов. Для увеличения фиксирующего момента пазы статора обычно имеют значительные прорези. Наличие такой внутренней фиксации ротора, не требующей конструктивных усложнений и дополнительной мощности извне, является несомненным достоинством магнитоэлектрических шаговых двигателей. Для обеспечения минимального зазора шаговые двигатели часто имеют сквозную конструкцию. Выпускается несколько серий шаговых двигателей с активным ротором — ДШ-А, ШДА, ШДА-3, ДША и др.
Кроме однопакетных шаговых двигателей с активным ротором на практике можно встретить двух-, трех- и многопакетные двигатели. У двухпакетного двигателя в одном корпусе имеется два совершенно одинаковых пакета стали ротора с одинаковыми обмотками. Пакеты стали смещены в пространстве, на половину зубцового деления, что обеспечивает соответствующий сдвиг обмоток в пространстве и расширяет возможности двигателя — ведет к уменьшению шага без увеличения диаметра ротора и т.п. Оба ротора-звездочки располагаются на одном валу и не имеют пространственного сдвига, т. е. оси их полюсов совпадают.
Иногда для индикаторных целей (работы практически без момента сопротивления) применяются гистерезисные шаговые двигатели, у которых ротор не имеет явно выраженных полюсов и возбуждается полем статора. Шаг таких двигателей определяется числом пазов статора.
Подбор и расчет шаговых двигателей для ЧПУ

![]()
При подборе шагового двигателя для ЧПУ необходимо отталкиваться от планируемой сферы применения станка и технических характеристик. Ниже представлены критерии выбора, классификация наиболее популярных двигателей и примеры расчета.
Как выбрать шаговый двигатель для ЧПУ: критерии
- Индуктивность. Следует вычислить квадратный корень из индуктивности обмотки и умножить его на 32. Полученное значение нужно сравнить с напряжением источника питания для драйвера. Различия между этими числами не должны сильно отличаться. Если напряжение питания на 30% и более превышает полученное значение, то мотор будет греться и шуметь. Если меньше, то крутящий момент будет слишком быстро убывать со скоростью. Большая индуктивность потенциально обеспечит возможность для большего крутящего момента. Однако для этого потребуется драйвер с большим напряжением питания.
- График зависимости крутящего момента от скорости. Позволяет определить, удовлетворяет ли выбранный двигатель условиям в техническом задании.
- Геометрические параметры. Имеет значение длина двигателя, фланец и диаметр вала.
Тип двигателя
Важный критерий – тип шагового двигателя для ЧПУ станка. Широко распространены биполярные, униполярные и трехфазные модели. Каждая из них имеет свои особенности:
- биполярные чаще всего используют для ЧПУ благодаря простому подбору нового драйвера при выходе старого из строя, высокому удельному сопротивлению на малых оборотах;
- трехфазные отличаются большей скоростью, чем биполярные аналогичного размера. Подходят для случаев, когда требуется высокая скорость вращения;
- униполярные представляют собой несколько видов биполярных двигателей в зависимости от подключения обмоток.
Примеры расчетов шаговых двигателей для ЧПУ
Определяем силы, действующие в системе
Необходимо определить силу трения в направляющих, которая зависит от используемых материалов. Для примера коэффициент трения составляет 0.2, вес детали – 300 кгс, вес стола – 100 кгс, необходимое ускорение – 2 м/с 2 , сила резания – 3 000 Н.
- Чтобы рассчитать силу трения нужно умножить коэффициент трения на вес движущейся системы. Для примера: 0.2 x 9.81 (100 кгс+300 кгс). Получается 785 Н.
- Чтобы рассчитать силу инерции надо умножить массу стола с деталью на требуемое ускорение. Для примера: 400 x 2 = 800 Н.
- Чтобы рассчитать полную силу сопротивления надо сложить силы трения, инерции и резания. Для примера: 785 + 800 + 3 000. Получается 4 585 Н.
Рассчитываем мощность
Формулы, приведенные ниже, представлены без учета инерции вала самого шагового двигателя и других вращающихся механизмов. Поэтому для большей точности рекомендуется увеличить или убавить требования по ускорению на 10%.
Для расчета мощности шагового двигателя следует воспользоваться формулой F=ma, где:
- F – сила в ньютонах, необходимая для того, чтобы привести тело в движение;
- m – масса тела в кг;
- а – необходимое ускорение m/c 2 .
Для определения механической мощности необходимо умножить силу сопротивления движения на скорость.
Рассчитываем редукцию оборотов
Определяется на основании номинальных оборотов сервопривода и максимальной скорости перемещения стола. Например, скорость перемещения составляет 1 000 мм/мин, шаг винта шариковой винтовой передачи – 10 мм. Тогда скорость вращения винта ШВП должна быть (1 000 / 10) 100 оборотов в минуту.
Для расчета коэффициента редукции учесть номинальные обороты сервопривода. Например, они равны 5 000 об/мин. Тогда редукция будет равна (5 000 / 100) 50.
Классификация шаговых двигателей для ЧПУ
Советские модели
В станках часто применяют шаговые двигатели индукторного типа, изготовленные в СССР. Речь о моделях ДШИ-200-2 и ДШИ-200-3. Они обладают следующими характеристиками:
| Параметр | ДШИ-200-2 | ДШИ-200-3 |
|---|---|---|
| Потребляемая мощность | 11.8 Вт | 16.7 Вт |
| Погрешность обработки шага | 3% | 3% |
| Максимальный статический момент | 0.46 нт | 0.84 нт |
| Максимальная чистота приемистости | 1 000 Гц | 1 000 Гц |
| Напряжение питания | 30 В | 30 В |
| Ток питания в фазе | 1.5 А | 1.5 А |
| Единичный шаг | 1.8 град | 1.8 град |
| Масса | 0.54 кг | 0.91 кг |
При выборе следует обратить внимание на наличие индекса ОС. Это особая серия с военной приемкой. Имеет более высокое качество исполнения, чем обычные модели.
Китайские модели
Примеры китайских шаговых двигателей для ЧПУ и их характеристики представлены ниже.
| Параметр | Модель | ||
|---|---|---|---|
| JKM Nema 17 42mm Hybrid Stepper Motor | JK42HS48-2504 | JK42HS40-1704 | |
| Длина, мм | 48 | 40 | 34 |
| Ток питания в фазе, А | 2.5 | 1.7 | 1.33 |
| Единичный шаг (угловое перемещение), град | 1.8 | 1.8 | 1.8 |
| Масса, кг | 0.34 | 0.32 | 0.22 |
Биполярные шаговые двигатели для ЧПУ от CNC Technology
| Параметр | Модель | ||
|---|---|---|---|
| 86HS156-5004 | 57HS76-3004 | 42HS48-1704A | |
| Ток питания в фазе, А | 5 | 3 | 1.7 |
| Единичный шаг (угловое перемещение), град | 1.8 | 1.8 | 1.8 |
| Индуктивность, мГн | 6 | 3.5 | 2.8 |
| Диаметр вала | 14 | 8 | 5 |
Зная критерии выбора и ориентируясь в предложениях по шаговым двигателям на рынке можно подобрать подходящую модель для станка ЧПУ. Главное – покупать у проверенных поставщиков.
3 причины купить шаговый двигатель для ЧПУ в компании CNC Technology
- Двигатели от надежных производителей, эти же двигатели мы используем в наших станках.
- Всегда в наличии на складе.
- Комплексность: в нашем каталоге можно подобрать не только ШД, но и драйверы, датчики, соединительные муфты и другие комплектующие.
Получить консультацию по выбору шагового двигателя можно по телефону 8 (800) 350 33 60.
Выбор шагового двигателя




Как выбрать шаговый двигатель
В статье содержатся базовые сведения о работе шагового двигателя и рекомендации по способу подбора.
Шаговый двигатель — устройство с постоянной мощностью, если мощность определить как момент, умноженный на скорость. Это означает, что крутящий момент обратно пропорционален скорости.  Чтобы уяснить, почему мощность мотора не зависит от скорости, представим себе идеальный шаговый двигатель.
Чтобы уяснить, почему мощность мотора не зависит от скорости, представим себе идеальный шаговый двигатель.
В настоящее время рынок наполнен предложениями самых разнообразных двигателей, для самых разнообразных приложений, что немудрено запутаться при выборе шагового двигателя, даже если вы подготовились и изучили свойства шаговых моторов, узнали их основное свойство терять момент с ростом скорости вращения и, оценив момент инерции нагрузки, приведенной к валу, примерно определили какой крутящий момент на каких скоростях нужно получить от шаговика. Так как все же выбрать шаговый двигатель и на что необходимо первым делом посмотреть при покупке?
1. Тип двигателя — биполярный, униполярный, 3-фазный и т.п.
Ни один из типов двигателей не имеет каких-то радикальных преимуществ перед другими. Но у каждого из них есть свои небольшие особенности. Так, 3-фазные двигатели более скоростные — имеют меньший момент, чем биполярные такого же размера, но сохраняют его лучше, тем самым их хорошо использовать с редукторами, в скоростных передачах. Биполярные — наиболее распространенные, дают высокий удельный на малых оборотах, под них легко купить драйвер взамен вышедшего из строя. Униполярные — представляют собой гибкое решение, по сути заключают в себе несколько видов биполярных двигателей (в зависимости от того, как подключить обмотки), а также собственно униполярный 6-выводной мотор. В подавляющем большинстве биполярных достаточно, а если нужна высокая скорость вращения — имеет смысл использовать 3-фазный двигатель.
2. График зависимости момента от скорости
Основная характеристика. С этим графиком можно свериться и проверить, может ли данный шаговый двигатель вообще удовлетворить условиям вашего техзадания.
3. Индуктивность
Вычислите квадратный корень из индуктивности обмотки и умножьте на 32, полученное число сравните с напряжением вашего источника питания для драйвера. Эти числа не должны сильно отличаться — если напряжение питания сильно(30 и более %) превышает полученное число, двигатель будет шуметь и греться; если же сильно не дотягивает — крутящий момент будет убывать со скоростью слишком быстро.
4. Геометрические параметры
Фланец, диаметр вала — важны как присоединительные размеры. Фланец вкупе с длиной двигателя также обрисовывает «мощность» шагового двигателя.