Все о шаговых двигателях: принцип работы, виды, достоинства и недостатки от интернет-магазина Антриб
Все о шаговых двигателях: принцип работы, виды, достоинства и недостатки от интернет-магазина Антриб
В компании Антриб Вы всегда найдете и сможете купить шаговые двигатели для бытовых устройств и промышленных приборов. Разобраться в многообразии механизмов можно с помощью наших консультантов, которые готовы ответить на все вопросы. Основные принципы и виды ШД с плюсами и минусами освещены в нашей специальной статье.
Принцип работы ШД
Шаговый двигатель представляет собой устройство с синхронным принципом работы и несколькими обмотками. Работа самого двигателя происходит за счет последовательной активации всех обмоток ротора, что обеспечивает его движение либо остановку. Вращению и статора, и ротора способствуют магнитные потоки. Из школьной программы известно, что сила вращения ШД пропорциональна силе магнитного поля, а она, в свою очередь, соответствует числу витков в обмотке, а также показателю тока в ней. Другими словами, шаговый двигатель – это устройство, которое преобразует электроимпульсы в простое механическое движение. Сама конструкция ШД состоит лишь из выводов, вала и округлого корпуса.
Виды ШД
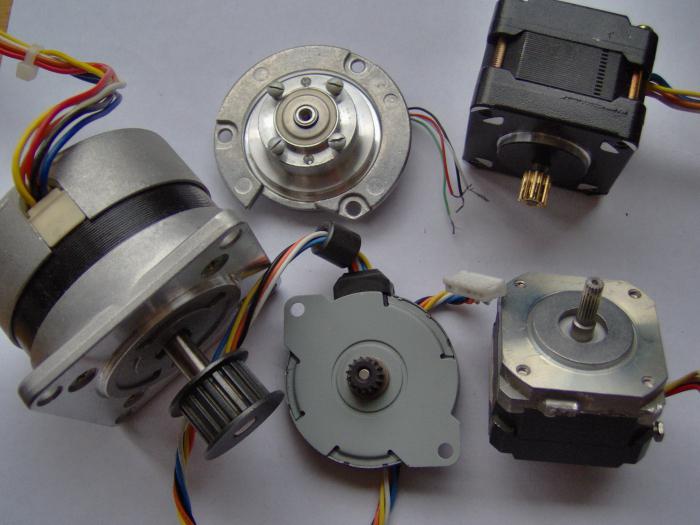
В каталоге компании Антриб представлены самые распространенные виды шаговых двигателей. Как в них разобраться? ШД может быть с переменным магнитным сопротивлением либо с постоянным. Кроме того, существуют гибридные двигатели.
- Шаговый двигатель переменного сопротивления имеет 3-4 обмотки. Он вращается свободно.
- Шаговый двигатель постоянного сопротивления имеет 2 обмотки. При вращении он испытывает сопротивление.
- Гибридный двигатель, по сути, является усовершенствованной моделью ШД с постоянным сопротивлением.
Сферы применения ШД
Шаговый двигатель используется во многих сферах. Их применяют в приводах устройств непрерывного движения или механизмов со стартово-стопном работой, в станках с ЧПУ. Управление в них происходит с помощью последовательности электроимпульсов. ШД часто встречаются в компьютерной памяти и устройствах для чтения оптических дисков. Они распространены и в военной промышленности. Также эти устройства нашли применение в автомобилях, различном производственном оборудовании, в бытовой технике.
Плюсы ШД
Среди самых главных достоинств шаговых двигателей можно назвать следующие параметры:
- Точность вращения — когда на обмотку попадает заряд, ротор поворачивается на нужный уровень.
- ШД могут работать в режиме быстрого старта, моментальной остановки и мгновенного перезапуска.
- Данный вид двигателей характеризуется высокоточной величиной повторяющегося шага без нарастания процента погрешности с каждым последующим оборотом.
- Возможна и работа на пониженных скоростях.
- Конструкция без щеток обеспечивает длительный срок эксплуатации и повышенную надёжность.
- Доступная цена.
Минусы ШД
У шаговых двигателей есть и недостаток – периодическое проскальзывание ШД, которое происходит при неправильной установке программного обеспечения. Для предотвращения этого, на двигатель монтируют датчики контроля за перемещением и вращательной скоростью. Он обеспечивает обратную связь и сигнализирует о возникшей проблеме, необходима перезагрузка производственного процесса. Кроме того, для избежания проскальзывания рекомендуется выбирать шаговый двигателей для ЧПУ с наибольшей мощностью.
Также в нашем магазине вы можете купить направляющие роликовой цепи. Мы уверены, что в каталоге компании Антриб Вы сможете выбрать подходящий ШД для числового программного обеспечения. Будут вопросы, звоните нашим консультантам по телефону +7 (495) 514-03-33 или воспользуйтесь возможностью заказа обратного звонка на нашем сайте.
Шаговые электродвигатели
Шаговые двигатели – это электромеханические устройства, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи.
В настоящее время промышленностью выпускается множество различных типов шаговых двигателей.
Актуальность темы реферата заключается в том, что в современных системах управления широко используются устройства, с цифровой обработкой сигналов. Цифровые системы управления привели к созданию нового типа исполнительных механизмов – шаговых двигателей.
Цель работы – более полное изучение шаговых электродвигателей.
Для достижения поставленной цели необходимо решить несколько задач: рассмотреть устройство и принцип работы шаговых электродвигателей, их характеритсики, типы шаговых двигателей, их применение, а также достоинства, недостатки и другие моменты.
Структура реферата включает в себя несколько частей: введение, основную часть (три главы), заключение и библиографический список, состоящий из пяти источников литературы.
1. Устройство и работа шаговых двигателей
1.1 Устройство и принцип работы
Шаговые электрические двигатели нашли довольно широкое применение в шлифовальных и фрезерных станках, транспортных средствах, бытовой технике, приборах и других механизмах и машинах.
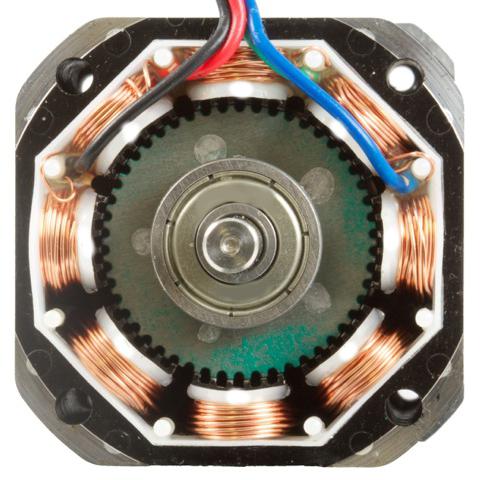
Устройство (Рисунок 1.1) представляет собой движок постоянного тока, один оборот которого разделен на несколько одинаковых шагов (это обеспечивается благодаря контроллеру). Главное его отличие от моторов других типов – отсутствие щеточного механизма.1
Шаговый электрический двигатель оснащен сигнализаторами, передатчиками и приборной панелью.
Рисунок 1.1 — Состав шагового двигателя
1.2 Работа шагового электродвигателя
Зная принцип работы шагового двигателя, вы сможете самостоятельно установить его или произвести ремонт. Он функционирует следующим образом:
1. На клеммы подается напряжение и специальные щетки начинают непрерывно вращаться. Входные импульсы устанавливают ведущий вал в положение, которое заранее определено.
2. Под воздействием импульсов вал перемещается под фиксированным углом.
3. Электромагниты зубчатого типа возбуждаются внешней цепью управления, обычно это микроконтроллер. Один из них (тот, к которому приложена энергия) притягивает к себе зубья шестерни, вследствие чего вал движка делает поворот.
4. Будучи выровнены по отношению к ведущему электромагниту, остальные магниты смещаются по направлению к следующей магнитной детали.
5. Отключением первого электромагнита и включением следующего обеспечивается вращение шестеренки.
6. Шестеренка выравнивается по отношению к предыдущему колесу, после чего весь процесс повторяется столько раз, сколько необходимо. Данные вращения являются постоянным шагом. Чтобы определить скорость мотора, необходимо посчитать число шагов, которое нужно для полного оборота мотора. Точность работы обеспечивается благодаря микропроцессорным системам управления шаговых двигателей.
1.3 Характеритсики
Шаговый двигатель с точки зрения механики и электротехники очень сложное устройство, имеющее много механических и электрических параметров. Ниже приведена расшифровка главных технических параметров шагового электродвигателя, используемых на практике:
• Количество полных шагов за один оборот. Основной параметр двигателя, определяющий его точность, разрешающую способность, плавность движения
Зарегистрируйся, чтобы продолжить изучение работы
. На двигателях серии FL57 этот параметр составляет 200 и 400 шагов на оборот.
• Номинальное напряжение. Допустимое постоянное напряжение на обмотке двигателя в статическом режиме. Часто этот параметр не приводится. Вычисляется по закону Ома через номинальный ток и сопротивление обмотки.
• Сопротивление обмотки фазы. На постоянном токе сопротивление обмотки электродвигателя. Параметр вместе с номинальным током, показывает какое напряжение можно подавать на обмотку двигателя.
• Угол полного шага. Количество полных шагов за один оборот представляется в другом виде. Показывает на какой угол повернется вал при одном полном шаге. Может быть подсчитан как 360° / количество полных шагов за оборот. Составляет 1,8 ° и 0,9° для шаговых электродвигателей FL57.
• Индуктивность фазы. Параметр становится важным на значительных скоростях вращения. Скорость нарастания тока в обмотке находится в зависимости от индуктивности фазы. При высоких частотах переключения фаз приходится увеличивать напряжение, чтобы ток нарастал быстрее.2
• Номинальный ток. Основной электрический параметр. Наибольший допустимый ток, при котором электродвигатель может работать сколь угодно длительное время. Для номинального тока указаны механические параметры электрического двигателя.
• Крутящий момент. Основной механический параметр. Данный параметр показывает, какой способен создать электрический двигатель максимальный крутящий момент. Иногда приводится механическая характеристика в виде зависимости крутящего момента от частоты вращения.
• Стопорный момент. Данный параметр необходим при отсутствии напряжения питания электродвигателя для того, чтобы провернуть вал.
• Момент инерции ротора. Характеризует механическую инерционность ротора двигателя. Электродвигатель разгоняется быстрее, чем меньше момент инерции ротора.
• Сопротивление изоляции. Как у всех электрических приборов – сопротивление между корпусом и обмотками.
• Удерживающий момент. Это крутящий момент при остановленном двигателе. При этом у двигателя должны быть запитаны две фазы номинальным током.
• Пробивное напряжение. Минимальное напряжение, при котором происходит пробой изоляции между обмотками и корпусом. Пробивное напряжение относится к разделу электрической безопасности.
2. Типы шаговых двигателей
2.1 Двигатели с переменным магнитным сопротивлением
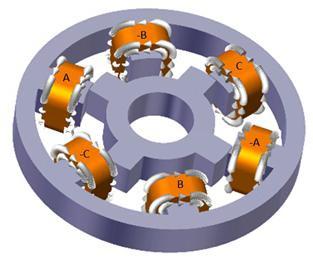
Шаговые электрические двигатели с переменным магнитным сопротивлением включают в себя из магнитомягкого материала ротор зубчатой формы и на статоре несколько полюсов. Намагниченность ротора отсутствует. Для простоты изложения на Рисунке 2.1 ротор имеет 4 зубца, а статор имеет 6 полюсов. Шаговый электрический двигатель с переменным магнитным сопротивлением имеет три независимые обмотки. Каждая из указанных обмоток намотана на противоположных полюсах статора электродвигателя. Такой двигатель имеет шаг 30°.
Рисунок 2.1 — Двигатель с переменным магнитным сопротивлением
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Ротор двигателя поменяет свое положение, если выключить данную обмотку и включить следующую, здесь ротор замыкает магнитный поток своими зубцами.3
Двигатели с переменным магнитным сопротивлением довольно редко используют в индустриальных применениях.
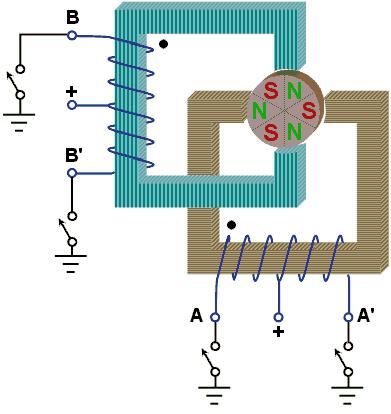
2.2 Двигатели с постоянными магнитами
У шаговых двигателей этого вида ротор содержит постоянные магниты
Шаговый двигатель, виды, принцип работы, плюсы и минусы

![]()
Шаговый двигатель, принцип работы
Шаговый двигатель – это бесщёточное устройство с синхронным принципом функционирования и несколькими обмотками. Работа двигателя основывается на поэтапной активации обмоток ротора, которые обеспечивают перемещения, то есть шаги ротора или его фиксацию. Вращение статора и ротора возникает засчёт магнитных потоков. Сила вращения шагового двигателя пропорциональна силе магнитного поля, которая соответствует числу витков в обмотке и показателю тока в ней. Итак, шаговый двигатель — устройство, преобразующее электроимпульсы в механическое движение. Конструкция двигателя состоит из выводов, вала и круглого корпуса.
Виды шаговых двигателей
Шаговый двигатель купить можно, выбирая из различных видов этих устройств. На современном рынке реализуются следующие виды шаговых агрегатов:
- Гибридные двигатели
- Двигатели с переменным магнитным сопротивлением
- Двигатель с постоянным магнитным сопротивлением
Двигатель переменного сопротивления вращается свободно, имеет три или четыре обмотки. Двигатель с постоянным магнитом испытывает сопротивление вращению, имеет две обмотки. Гибридный двигатель – это усовершенствованная модель двигателя постоянного сопротивления.
Сферы применения
Шаговый двигатель купить уместно для использования во многих технических сферах. Шаговые двигатели применяют в приводах непрерывного движения или в приводах механизмов со стартово-стопным режимом. Купить шаговый двигатель уместно для станков с чпу, поскольку управление в них осуществляется последовательностью электроимпульсов. Благодаря возможности точного позиционирования шаговые двигатели применяют в работе устройств компьютерной памяти и чтения оптических дисков. Высокая надёжность и хорошие технические показатели валовых двигателей объясняют их распространённое использование в военной промышленности. Также эти устройства нашли применение в автомобилях, различном производственном оборудовании, в бытовой технике.
Плюсы и минусы использования
Прежде чем шаговый двигатель купить следует учесть преимущества и недостатки его использования. Несомненным достоинством шаговых двигателей является точность вращения, при попадании заряда на обмотку ротор поворачивается на конкретный уровень. Плюсом является возможность купить шаговый двигатель для чпу по относительно невысокой стоимости. Шаговые двигатели отлично подойдут для оборудования систем автоматизации технических процессов. Шаговые двигатели способны работать в режиме быстрого старта или остановки, а также перезапуска. Этим устройствам присуща высокоточная величина шага, высокая степень повторяемости без нарастания процента погрешности с каждым оборотом. Возможность работы на пониженных скоростях вращения. Ещё одно преимущество шаговых двигателей обусловлено отсутствием в их конструкции щёток, что продлевает срок эксплуатации и повышает надёжность.
К недостаткам относится свойство шагового двигателя проскальзывать. Эта проблема происходит при неправильной установке программного обеспечения, при вхождении вращательной скорости в резонансное состояние, при превышении уровня валовой нагрузки. Чтобы предотвратить возможность проскальзывания на двигатель монтируют датчики для обратной связи для контроля за перемещением и скоростью вращения. В то же время датчик лишь сигнализирует о появлении проблемы, для её устранения потребуется остановка производственного процесса. Для предотвращения проскальзывания рекомендуется купить шаговый двигатель для чпу с увеличенной мощностью. Это позволит избежать проблем с проскальзыванием шагового двигателя и воспользоваться всеми его преимуществами.
Шаговый двигатель: принцип работы, схема, описание, характеристики
В современной электротехнике используется множество самых разнообразных устройств, некоторые из них предназначаются для автоматизации технологических операций. Таковым является и шаговый двигатель. Принцип работы и устройство данного прибора описаны в статье.
Что это такое?
Системы управления с разомкнутой цепью (без обратной связи)
Чаще всего это оборудование управляется специальной электронной схемой. Питается оно только от источника переменного тока. Такие двигатели часто используются в схемах, где требуется управление частотой вращения. Это позволяет избежать необходимости использования дорогого и сложного контура обратной связи, да и защита электродвигателя становится проще (требуется только предусмотреть быстрое обесточивание).
Данный принцип работы применяют в схемах с разомкнутой связью. Следует помнить, что указанная схема (без контура обратной связи) выгодна с экономической точки зрения, но у нее есть ряд существенных ограничений.
Так, поворот ротора является достаточно нестабильным, колебательным, отчего частота вращения и прочие характеристики движения ни в коем случае не могут быть настолько же точными, каковыми они являются в двигателях постоянного тока с контуром обратной связи. Для расширения сферы применения шагового двигателя требуется изыскивать способы снижения вибрации.
Конфигурация системы
Чтобы лучше понимать устройство шагового двигателя и принцип его работы, можно рассмотреть схему функционирования прибора под его управлением, который лет 20 назад использовался для изготовления перфокарт. Для этой цели повсеместно применяли трех- и четырехфазные ШД. Сейчас мы рассмотрим схему работы первого.

Фазы обозначают порядковыми номерами 1, 2, 3 и т.д. либо буквами А, В, С и т.д. Последний вариант используется только в случае некоторых двухфазных двигателей. Таким образом, в каждый конкретный момент времени возбуждена только одна фаза из двух, трех или четырех имеющихся (в зависимости от типа двигателя). При объяснении принципов работы такого устройства это обстоятельство упоминается постоянно, но необходимо понимать, что указанная схема вовсе не является идеальным способом управления.
Шаг и инкремент
Наиболее простым вариантом является подача одиночных импульсов от управляющей схемы. В этом случае, к примеру, двигатель за один раз поворачивает ведущую звездочку конвейера на какое-то расстояние вперед. Следует заметить, что при подаче массивного механизма вперед только на один шаг еще более усугубляется проблема вибрации, да и значительная инерция дает о себе знать.
В таких случаях куда более оправданно использовать шаговый двигатель, который может за один управляющий импульс делать несколько движений. Также не помешает использовать звездочку с более мелкими зубьями. К слову, каждое такое движение называется инкрементом.
В описываемых нами случаях инкремент равен одному и нескольким шагам соответственно. После каждого цикла двигатель на какое-то время останавливается, после чего все повторяется сначала. Это называется инкрементным движением и инкрементным управлением соответственно.
Общий принцип управления
На один инкремент количество шагов больше четырех приходится в каких-то производственных линиях, конвейерах. Когда данные с запоминающего устройства (внутренняя флеш-память, жесткий диск компьютера) отправляются к контроллеру, выполняются они блок за блоком. Каждый из них содержит строго определенное количество символов (32, 48 или 64), причем в разных системах и при различных назначениях устройства эта цифра может серьезно варьироваться.
Неудивительно, что в последние годы стали распространены самоделки на основе микрокомпьютера Arduino. Шаговый двигатель в такой конструкции идеален, так как в такой связке его можно приспособить как в качестве силовой установки для игрушки, так и для довольно сложного промышленного оборудования.
Блок данных перед его использованием переносится в полупроводниковую память на контроллере, после чего движение начнется в соответствии с инструкциями, которые были записаны в первом блоке информации (перед тем как подключить электродвигатель, обязательно нужно выяснить эти характеристики).
После выполнения инструкций система начинает считывать второй массив информации. Если каждое движение состоит из множества мелких шагов, то перед основным контроллером необходимо монтировать дополнительный каскад. Чаще всего его функции выполняются входным контроллером. Он отправляет данные на второй управляющий контур с каким-то интервалом, заданным системой (Arduino). Шаговый двигатель в этом случае защищен от перегрузки запросами.
Некоторая специфика использования ШД
Мы расскажем вам о некоторых нюансах использования шаговых двигателей, а также дадим определение часто используемым в этой области терминам:
— Маленький угол шага. Как вы уже знаете, после каждого управляющего импульса ротор двигателя поворачивается на какой-то определенный градус. Чем шаг меньше, тем более высокой может быть непосредственная частота вращения. Важно знать, что шаговые двигатели вполне могут обеспечивать очень маленький шаг. Шаговым числом в этом случае называется количество оборотов за один шаг, причем это значение очень важно для инженеров. Высчитывается оно по следующей формуле:
S = 360/θS, где S – шаговое число, θ – угол шага (угол поворота).
В большинстве случаев привод шагового двигателя может выполнять 96, 128 или 132 шага за один оборот. Четырехфазные модели иногда имеют значение в 200. Редкие виды прецизионных двигателей за один только оборот могут сделать сразу 500 или 1000 шагов. Впрочем, для простых разновидностей это недостижимо, так как у них угол поворота равен 90, 45 или 15°.
Борьба с нежелательными явлениями
Зазор между роторными и статорными зубцами всегда делается минимальным для увеличения жесткости фиксации. Сама точность позиционирования зависит от характеристик только лишь инвертора, так как прочие факторы на нее влияют в гораздо меньшей степени.
А сейчас необходимо рассмотреть ряд важных характеристик и понятий, таких, как максимальный статический момент, положения «мертвого» ротора, а также точность позиционирования всех этих положений. Для определения вышеперечисленных терминов существует сразу две общепринятых распространенных концепции.
Максимальный статический эффект
Как мы уже и говорили, он имеет сразу два положения:
- Удерживающий. Это максимально допустимый эффект, который теоретически может быть приложен к валу уже возбужденного шагового двигателя без возникновения движения.
- Фиксирующий. Соответственно, это также максимальный статический эффект, который теоретически может быть приложен к валу невозбужденного двигателя без возникновения последующего вращения.
Чем удерживающий момент выше, тем ниже вероятность возникновения погрешностей позиционирования, вызываемых непрогнозируемой нагрузкой (отказали конденсаторы для электродвигателей, например). Полный фиксирующий момент возможен только в тех моделях двигателей, в которых используются постоянные магниты.
«Мертвые» положения ротора
Существует сразу три положения, в которых ротор полностью останавливается:
- Положение равновесия. В нем происходит полная остановка возбужденного шагового двигателя.
- Фиксация. Также состояние, в котором останавливается ротор. Но используется это понятие только в отношении тех двигателей, у которых в конструкции имеется постоянный магнит.
- В современных моделях шаговых двигателей, которые соответствуют всем нормам экологической и энергетической безопасности, при остановке ротора полностью обесточивается и обмотка.
О точности позиционирования
- Ошибка углового положения. Определяется как положительный или отрицательный уход от нормативного углового состояния, что очень часто наблюдается в случаях перехода ротора из одного положения в другое. Как правило, виновата инерция, а также плохая подгонка деталей.
- Точность позиционирования. Это максимальное значение ошибок углового положения ротора, которые возникают за весь период шагового движения.
Важно! Отыскать нормативные сведения для каждой категории шаговых двигателей можно как на официальной странице их производителей, так и из справочной документации, которая прилагается к такого рода изделиям. Как правило, значение ошибки находится в пределах от +0,08 до -0,03°. Проще говоря, точность позиционирования высчитывается в виде суммы двух этих показателей: 0,08° + 0,03° = 0,11°.
Таким образом, шаговый двигатель, принцип работы которого мы описываем, относится к высокоточному оборудованию.
Высокое отношение электромагнитного момента к моменту инерции
Как вы уже представляете, от шагового двигателя требуется максимально быстро начать движение сразу после поступления на контроллер управляющего импульса. Он должен столь же быстро остановиться, обладая высокой точностью позиционирования. Если во время движения последовательность импульсов управления прервется, двигатель перестанет работать в положении, определяемом последним импульсом.
Также следует иметь в виду, что отношение электромагнитного момента к моменту инерции ротора у ШД должно быть намного выше аналогичного показателя для обычных электромоторов.
Шаговая частота вращения и частота импульсов
Так как частота вращения у ШД фактически представляет собой количество шагов в единицу времени, вместо термина «частота вращения» в специализированной литературе нередко можно встретить определение «шаговая частота вращения». Перед тем как подключить электродвигатель, об этих нюансах нужно обязательно прочесть.
Так как у большинства шаговых двигателей эта частота равна количеству управляющих импульсов, не стоит удивляться необычному ее обозначению в технических справочниках. Точнее, для подобных моторов единицей измерения нередко является герц (Гц).
n = 60f/S, где n – частота вращения, выражается в оборотах в минуту; f – шаговая частота вращения; S – число шагов.
Кстати, а как определить требуемые конденсаторы для электродвигателей? Очень просто! Достаточно только использовать вот эту формулу:
Несложно догадаться, что под Рном понимается номинальная мощность электродвигателя в кВт.
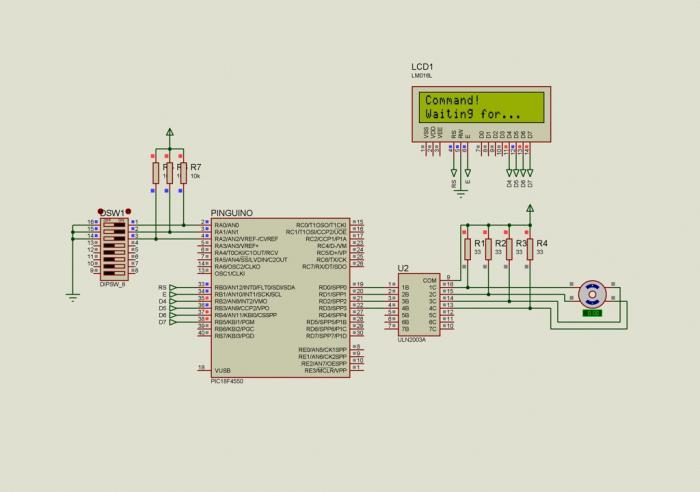
Простейшая схема подключения двигателя EM-178
А сейчас нами будет рассмотрено простейшее подключение шагового двигателя на примере модели ЕМ-178, которая повсеместно используется в промышленных принтерах.
Выполняется подключение шагового двигателя к красному контроллеру
Подключается к синему разъему
Расписать работу более масштабно попросту не получится, так как существуют миллионы самых разнообразных моделей, характеристики которых имеют существенные различия.
В настоящее время используются различные типы электродвигателей этой конструкции. В статье мы обсудим самые распространенные.
Реактивные двигатели
Именно эта разновидность приборов повсеместно используется по сей день. По сути, это почти стандартный трехфазный двигатель, на статоре которого имеется шесть зубцов. Проще говоря, каждые два зубца, противостоящие друг другу, принадлежат к одной и той же фазе. Используется последовательное или параллельное соединение их катушек.
Что касается ротора, то на нем располагается только четыре зубца. Чаще всего статор и ротор производители изготовляют из магнитомягкого материала, но нередко можно встретить просто массивные роторы из обычных металлов. Все дело в том, что к веществам, которые идут на их производство, имеется только одно важное требование: они должны обеспечивать как можно лучшую проводимость магнитного поля. Это чрезвычайно важно, если обсуждать шаговый двигатель: принцип работы напрямую связан с напряженностью магнитного поля.
Устройства с постоянными магнитами
В качестве ротора используется магнит цилиндрической формы, на статоре же есть четыре зубца с индивидуальной обмоткой. Чтобы сильнее уменьшить угол шага, в этих моделях шаговых двигателей приходится увеличивать как количество полюсов ротора, так и число зубцов на статоре. Впрочем, следует помнить о том, что оба этих параметра имеют достаточно строгие физические ограничения. В последнем абзаце нашей статьи есть информация об альтернативной их конструкции (биполярный шаговый двигатель), но такие модели можно встретить не так часто.
Как мы уже говорили, шаговые устройства с постоянными магнитами останавливаются в строго фиксированном положении даже в тех случаях, когда убрано напряжение с обмоток. В этом случае срабатывает тот самый механизм фиксации, который мы обсудили выше, – положение фиксации.
Использование постоянных магнитов оправдано с многих точек зрения, но в то же время их применение может приводить сразу к нескольким проблемам. Во-первых, их цена далека от доступной. Кстати, сколько стоит такой шаговый двигатель? Цена моделей с постоянными магнитами превышает 100 тысяч рублей.
Во-вторых, максимальная плотность магнитного поля может быть не слишком высока, так как это значение ограничено намагниченностью самого носителя. Так, сравнительно дешевые постоянные ферритовые магниты не позволяют получить более-менее достаточной напряженности поля. А какие есть еще типы электродвигателей, работающих по этому принципу?
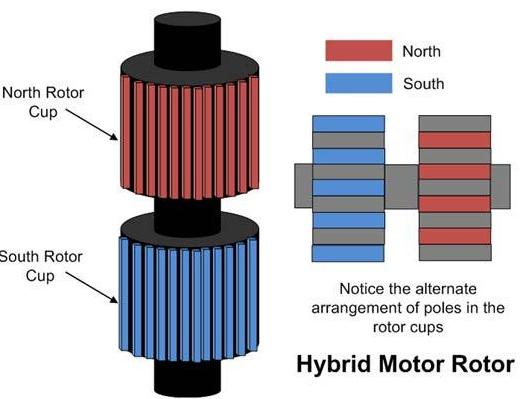
Гибридные установки
Ротор имеет практически ту же конструкцию, что и у реактивного ШД, но вот обмотки производятся по несколько иной схеме. Дело в том, что на каждом полюсе обмотка есть только у одной катушки (трехфазные ШД). Нетрудно догадаться, что в четырехфазных моделях намотано уже две катушки. Намотка ведется по бифилярной схеме. Особенность в том, что при возбуждении на катушках создается магнитное поле разных полярностей (биполярный шаговый двигатель).