Шаговые двигателя драйвер контроллер схема
Драйвер шагового двигателя
Здесь будет рассматриваться драйвер как отдельный блок. Т.к. я использую блочную конструкцию. Т.е. три драйвера, интерфейсная плата, блок питания.

Пункт первый (набившим плату можно не читать J). После травления, лужения, и сверловки, внимательно осмотрите всю плату на предмет косяков. Сопли, протравленные дорожки, и т.д. могут серьезно обломать весь кайф. Далее набиваем плату, сначала все перемычки, затем сопротивления, диоды, панели, емкости и биполярные транзисторы. Хочу обратить особое внимание на Ваше внимание, извините за… Не ленитесь перед впайкой проверить деталь на исправность. Прозвонка иногда спасает от дыма… Я зная цветовую кодировку резисторов на ура, подкалывался несколько раз, причем со спец. эффектами. Когда используешь резисторы из загашников которые годами выпаивались из всего что под руку попадет, забываешь, что при нагреве красный может стать оранжевым, а оранжевый — желтым… Впаиваем провода питания +5В, степ, GND, и провода контроля Vref. Примерно вот так это выглядит:

Пункт второй (настраиваем режимы работы и удержания). 555 я лично впаиваю в плату, кто поставил панель, значит втыкаем, блок индикации должен быть отключен. Подстроечники на середину. Вывод степ замыкаем на общий (раб. режим). Прозваниваем цепь +5В и если нет короткого, включаем питание. Тестер подключен к контрольным точкам Vref (молодец Dj_smart, предусмотрел на плате), если номиналы подстроечников и сопротивления между ними соответствуют схеме, то подстроечником раб. режима можно регулировать напряжение около 0 – 1В т.е. ток 0 – 5А. Настроим на 1А. Тут все просто. Rизм. у нас 0,2 Ом. Нам нужен 1А. 0,2х1=0,2В. Т.е. если мы установим Vref – 0,2В, ток в обмотке будет 1А. Если нам нужен ток в обмотке скажем 2,5А, то Vref=0,2х2,5=0,5В.
Короче мы выставили 0,2В.

Теперь размыкаем степ и общ. Если все элементы в норме и по схеме, то после размыкания примерно через полсекунды Vref снизится вдвое (если второй подстроечник посередине) Настраиваем им Vref удержания. У меня 50 проц. от рабочего:

Главное обратите внимание на обязательную задержку при переключении. При замыкании степ на общий, мгновенно должен включаться рабочий режим, а при размыкании уходить на удержание с задержкой 0.5с. Если задержки нет ищите проблемы, иначе при работе будут не хилые глюки. Если не заводится, идите в тему форума, не устраивайте пожаров.
Пункт третий (настраиваем блок индикации). Печатка разведена под 315-361, как и у Dj_smarta тоже мешок, надо куда то паять… Но в принципе туда можно паять любую пару, из наших я испытывал 502 – 503, 3102 – 3107, все пашет, только будьте внимательны с цоколевкой! Если все правильно впаяно и рабочее, то работает без проблем. Индикация вносит небольшую корректировку в Vref, так что после подключения индикации, окончательно отрегулируйте ток под свой ШД (лучше для начала 70% от номинального). Фотки как горят светодиоды делать не стал J.
Пункт четвертый, важный (297) Выключив питание втыкаем 297 на свое место. Еще раз проверяем монтаж, и элементы обвязки, если все ОК (при любом сомнении проверяем дважды) врубаем питание. Проверяем осциллографом сигнал на первой ноге, он такой:

Либо на 16 ноге, он такой:

Это означает что шим запустился, счастливчики имеющие частотомер могут померить частоту, она очень приблизительно должна соответствовать 20кГц.
ВНИМАНИЕ. Это важно. Даже если шим не запустится, логическая часть 297 будет работать, т.е. при подключении нагрузки все сигналы пойдут… Но прикиньте 24В без шима на ШД 2Ом. Так что важно убедиться в запуске генератора микросхемы.
Пункт пятый. Опять выключаем питание и вставляем IR, впаиваем полевики. При использовании ШД с током обмотки более 2,5А, необходимо полевики вынести на радиатор. Обратите внимание при впайке диодов, они могут различаться по меткам. Мне правда не встречалось (у меня в перемешку 522 и 1N4148 (аналог) у них цоколевка совпадает) Но учитывая что людям IR с неправильной логикой работы попадаются, будьте внимательны. По цепям питания проверяем на коротыш, проверяем монтаж. Я сразу включал все питание, только вместо ШД припаивал соединенные встречно параллельно светодиоды:

Если они шагают, значит все ОК, подрубаем мотор, подключаем к ЛПТ или интерфейсной плате с опторазвязкой (кому как нравиться) и балдеем .

Данное описание не претендует на бестселлер, оно может дополняться и критиковаться но только по существу…
Проверяем L297 с помощью ТМ2
Короче суть прикола .

Шим у нас около 20кГц. Не услышим. Собираем на ТМ2 делитель на 2, при 10 кгц — уже будет пищать на всю. Вот схема
Вывод 3 соединяем с выводом 1 L297. Вывод 5 через конденсатор 0,01-0,1 мкф на наушник, второй конец наушника — на массу. Тэкс. Да, питание у неё — 14-я +5, 7-я — масса. Остальные ноги оставляем свободными.

Схема и печатная плата — У вас нет доступа к скачиванию файлов с нашего сервера
Видео работы устройства:
Разработка контроллера шагового двигателя
Главная > Дипломная работа >Коммуникации и связь
Пояснительная записка к дипломному проекту: 85 страниц, 15 рисунков, 29 таблиц, 24 источника, 5 приложений, 3 листа чертежей формата А1.
Объект исследований: разработка контролера шагового двигателя робота.
Предмет исследования: контроллер шагового двигателя.
В первом разделе рассмотрены общие принципы разработки устройств на микроконтроллерах и внедрения их в производство, принцип действия шаговых двигателей.
Во втором разделе выполнена разработка структурной, функциональной и принципиальной схем контролера шагового двигателя робота, разработаны алгоритм и ПО микроконтроллера, осуществлен выбор элементной базы.
В третьем разделе выполнено технико-экономическое обоснование объекта разработки, сделан вывод о целесообразности производства данного устройства.
В четвертом разделе проведены расчеты вентиляции, природного и искусственного освещения, уровня шума, полученные значения сопоставлены с нормативными.
АЛГОРИТМ, КВАРЦЕВЫЙ РЕЗОНАТОР, МИКРОКОНТРОЛЛЕР, МИКРОПРОЦЕССОРНАЯ СИСТЕМА, ШАГОВЫЙ ДВИГАТЕЛЬ
Современную микроэлектронику трудно представить без такой важной составляющей, как микроконтроллеры. Микроконтроллеры незаметно завоевали весь мир. Микроконтроллерные технологии очень эффективны. Одно и то же устройство, которое раньше собиралось на традиционных элементах, будучи собрано с применением микроконтроллеров, становится проще, не требует регулировки и меньше по размерам. С применением микроконтроллеров появляются практически безграничные возможности по добавлению новых потребительских функций и возможностей к уже существующим устройствам. Для этого достаточно просто изменить программу.
Однокристальные (однокорпусные) микроконтроллеры представляют собой приборы, конструктивно выполненные в виде БИС и включающие в себя следующие составные части: микропроцессор, память программ и память данных, а также программируемые интерфейсные схемы для связи с внешней средой.
Мировая промышленность выпускает огромную номенклатуру микроконтроллеров. По области применения их можно разделить на два класса: специализированные, предназначенные для применения в какой-либо одной конкретной области и универсальные, которые не имеют конкретной специализации и могут применяться в самых различных областях микроэлектроники, с помощью которых можно создать как любое из перечисленных выше устройств, так и принципиально новое устройство.
В практике часто встречаются исполнительные устройства на шаговых двигателях (ШД). Принтеры, факсы, станки с ЧПУ, стиральные машины, дисководы, видеоплееры, проявочные и упаковочные машины – вот далеко не полный перечень устройств, использующих ШД. Одно из применений в учебных целях – это радиолюбительские модели, исполнительные узлы роботов, привод редукторов точного поворота антенн… Устройство можно также применить в качестве привода в станках для точного сверления и калибровки отверстий небольшого диаметра, в транспортерных линиях и т.п.
Предмет исследования – разработка контроллера шагового двигателя робота.
Целью работы является разработка схемы управления шаговым двигателем на базе микроконтроллера, которая в дальнейшем будет использоваться для управления исполнительных механизмов робота.
Задачей данного исследования является разработка алгоритма работы микроконтроллера, управляющего шаговым двигателем робота; функциональной, структурной и принципиальной схемы устройства.
Проект основывается на микроконтроллере типа AT90S2313 фирмы Atmel.
1. Теоретические основы разработки
1.1 Разработка микропроцессорной системы на основе микроконтроллера
1.1.1 Основные этапы разработки
Микропроцессорная система (МПС) на основе микроконтроллера (МК) используются чаще всего в качестве встроенных систем для решения задач управления некоторым объектом (в конкретном случае – шаговым двигателем). Важной особенностью данного применения является работа в реальном времени, т.е. обеспечение реакции на внешние события в течение определенного временного интервала. Такие устройства получили название контроллеров.
Перед разработчиком МПС стоит задача реализации полного цикла проектирования, начиная от разработки алгоритма функционирования и заканчивая комплексными испытаниями в составе изделия. Методология проектирования контроллеров может быть представлена так, как показано на рис. 1.1.
В техническом задании формулируются требования к контроллеру с точки зрения реализации определенной функции управления. Техническое задание включает в себя набор требований, который определяет, что пользователь хочет от контроллера и что разрабатываемый прибор должен делать. Техническое задание может иметь вид текстового описания.
На основании требований пользователя составляется функциональная спецификация, которая определяет функции, выполняемые контроллером для пользователя после завершения проектирования, уточняя тем самым, насколько устройство соответствует предъявляемым требованиям. Она включает в себя описания форматов данных, как на входе, так и на выходе, а также внешние условия, управляющие действиями контроллера.
Рисунок 1.1 – Основные этапы разработки контроллера
Этап разработки алгоритма управления является наиболее ответственным, поскольку ошибки данного этапа обычно обнаруживаются только при испытаниях законченного изделия и приводят к необходимости дорогостоящей переработки всего устройства. Разработка алгоритма обычно сводится к выбору одного из нескольких возможных вариантов алгоритмов, отличающихся соотношением объема программного обеспечения и аппаратных средств.
При этом необходимо исходить из того, что максимальное использование аппаратных средств упрощает разработку и обеспечивает высокое быстродействие контроллера в целом, но сопровождается, как правило, увеличением стоимости и потребляемой мощности. При выборе типа МК учитываются следующие основные характеристики:
– набор команд и способов адресации;
– требования к источнику питания и потребляемая мощность в различных режимах;
– объем ПЗУ программ и ОЗУ данных;
– возможности расширения памяти программ и данных;
– наличие и возможности периферийных устройств, включая средства поддержки работы в реальном времени (таймеры, процессоры событий и т.п.);
– возможность перепрограммирования в составе устройства;
– наличие и надежность средств защиты внутренней информации;
– возможность поставки в различных вариантах конструктивного исполнения;
– стоимость в различных вариантах исполнения;
– наличие полной документации;
– наличие и доступность эффективных средств программирования и отладки МК;
– количество и доступность каналов поставки, возможность замены изделиями других фирм.
Список этот не является исчерпывающим.
Номенклатура выпускаемых в настоящее время МК исчисляется тысячами типов изделий различных фирм. Современная стратегия модульного проектирования обеспечивает потребителя разнообразием моделей МК с одним и тем же процессорным ядром. Такое структурное разнообразие открывает перед разработчиком возможность выбора оптимального МК, не имеющего функциональной избыточности, что минимизирует стоимость комплектующих элементов.
1.1.2 Разработка и отладка аппаратных средств
После разработки структуры аппаратных и программных средств дальнейшая работа над контроллером может быть распараллелена. Разработка аппаратных средств включает в себя разработку общей принципиальной схемы, разводку топологии плат, монтаж макета и его автономную отладку. На этапе ввода принципиальной схемы и разработки топологии используются, как правило, распространенные системы проектирования типа «ACCEL EDA» или «OrCad».
1.1.3 Разработка и отладка программного обеспечения
Содержание этапов разработки программного обеспечения, его трансляции и отладки на моделях существенно зависит от используемых системных средств. В настоящее время ресурсы 8-разрядных МК достаточны для поддержки программирования на языках высокого уровня. Это позволяет использовать все преимущества структурного программирования, разрабатывать программное обеспечение с использованием раздельно транслируемых модулей. Одновременно продолжают широко использоваться языки низкого уровня типа ассемблера, особенно при необходимости обеспечения контролируемых интервалов времени. Задачи предварительной обработки данных часто требуют использования вычислений с плавающей точкой, трансцендентных функций.
В настоящее время самым мощным средством разработки программного обеспечения для МК являются интегрированные среды разработки, имеющие в своем составе менеджер проектов, текстовый редактор и симулятор, а также допускающие подключение компиляторов языков высокого уровня типа Паскаль или Си. При этом необходимо иметь в виду, что архитектура многих 8-разрядных МК вследствие малого количества ресурсов, страничного распределения памяти, неудобной индексной адресации и некоторых других архитектурных ограничений не обеспечивает компилятору возможности генерировать эффективный код.
1.2 Принципы работы шагового двигателя
Существуют два основных типа шаговых двигателей, применяемых в практике:
• с постоянным магнитом;
• с переменным магнитным полем.
Конструкция типичного биполярного шагового двигателя показана на рис. 1.2.
Двигатели с постоянным магнитом бывают биполярными (рис. 1.3) и униполярными (рис. 1.4).
Биполярные двигатели – наиболее простые для решения несложных задач. Они состоят из постоянного магнита вращающегося ротора и окруженного полюсами статора, состоящего из четырех обмоток. Протекание тока в обмотках статора возбуждает ротор, и при последовательной коммутации обмоток происходит ступенчатое вращение.
Рисунок 1.2 – Конструкция биполярного шагового двигателя
Рисунок 1.3 – Схема биполярного двигателя
Рисунок 1.4 – Схема униполярного двигателя
Для двигателя этого типа существует три метода возбуждения обмоток.
• Возбуждение обмоток происходит в последовательности AB/CD/ BA/DC (ВА указывает на то, что обмотка АВ возбуждается в противоположном направлении). Эта последовательность известна под названием «одна фаза активна», «полный шаг» или «привод волны». В каждый момент возбуждается только одна из фаз (рис. 1.5).
Рисунок 1.5 – Последовательность возбуждения обмоток «одна фаза активна»
• Возбуждение одновременно обеих фаз, чтобы ротор выровнялся между двумя положениями полюса. Такой метод называется «две фазы активны», «полный шаг». Это состояние является следующей последовательностью привода биполярного двигателя и дает самый высокий вращающий момент (рис. 1.6).
• Возбуждение одной фазы, потом – двух, потом – одной и т.д., чтобы ротор двигался поэтапно, вращаясь в квадранте. Эта последовательность известна как «ступенчатый метод половины». Полуволна имеет большой угол вращения за шаг двигателя, но слабый вращающий момент (рис. 1.7).
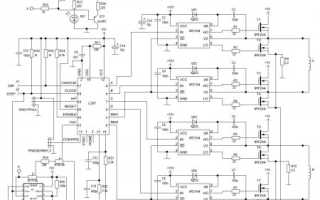
Драйвер биполярного шагового двигателя.
1.3А. Так же греются резисторы R2, R4, R6, R8.
Подскажите пожалуйста, что нужно в данной схеме исправитьдобавить ?
Так же в наличии есть полевики IRF640 IRF9640. Скажите, пожалуйста, можно ли их как-нибудь приспособить для данной задачи.
Помощь в написании контрольных, курсовых и дипломных работ здесь.
Драйвер шагового двигателя
Нужен совет тех, кто хорошо разбирается в управлении ШД. Я открываю шаговым двигателем днище.
Драйвер шагового двигателя на BTS7960B
Собрал драйвер биполярного шагового двигателя на четырёх BTS7960B по даташиту. Управляю сием.
Помехи от шагового двигателя
Собираю схему управления униполярным ШД. Двигатель от эпсона 1050 В настоящий момент все выглядит.
Источник питания для драйвера Шагового Двигателя
Здравствуйте. 1) Не подскажи те, как можно запитать драйвер ШД (см. схема)? datasheet.
1.3А. Так же греются резисторы R2, R4, R6, R8.
Подскажите пожалуйста, что нужно в данной схеме исправитьдобавить ?
[/attachment]
во первых транзисторы силовые я бы поменял, у них максимум 1.5А при ваших номинальных 1А
и пиковые значения в индуктивной нагрузкой легко могут превысить их абсолютный максимум в 3А
во вторых не вижу как силовые транзисторы у вас войдут в ключевой режим
Hfe силовых транзисторов может быть в минимуме 25, значит для рабочего 1А им в базу надо вкачать 40мА, но у вас токи на порялок меньше
а если с учетом индуктивной нагрузки и пиков при открытии вкачивать надо еще больше
почему не возьмете проверенные схемы коих не мало в сети?
а еще проще готовый купить
1.3А. Так же греются резисторы R2, R4, R6, R8.
Подскажите пожалуйста, что нужно в данной схеме исправитьдобавить ?
[/attachment]
20-21в. Резистор, на данный момент, стоит мощностью 0.5Вт.
Да, резисторы-ключи у меня старые, советские, КТ315.
20-21в. Резистор, на данный момент, стоит мощностью 0.5Вт.
Да, резисторы-ключи у меня старые, советские, КТ315.
Не любой КТ315 будет работать на 24В.
Кроме того,в силовых схемах,не рекомендуется,чтобы база «плавала».Для некоторых транзисторов рабочее напряжение К-Э указывалось при определённом сопротивлении база-эмитер.Помнится,в молодости был чрезвычайно разочарован тем,что транзисторы горели при штатном напряжении,пока моё внимание на это не обратили.
То есть,допустим,указано максимум 30В,но при сопротивлении Б-Э-100 ом,что конечно предъявляет к предыдущему каскаду.Рекомендую поставить,хотя бы 1 ком из базы на землю.Можно ограничить ток(соответственно и мощность привода)ограничением тока источника 24В линейно,или используя ШИМ.
вам просто невдомек, что характер токов через обмотки мотора очень далеки от статических значений
если вы не видите радиоволны это не значит, что они не существуют
чтобы увидеть токи в динамике надо смотреть на осциллограф или делать замер очень быстрым АЦП
вы в курсе, что готовая плата нормального драйвера стоит 100-200 рублей?
как бы в даташите написано, что пиковый ток 1А
но вас не смущает, что там же указано Dryve Method — Somstant Current?
насколько я понимаю это означает, что драйвер должен обеспечить постоянный ток не более 1А
а вовсе не то, что если вы подадите 24В то ток не превысит 1А
по крайней мере с шаговиками на чпу станках именно так. Сопротивление обмотки у мотора как правило позволяет вогнать токи куда больше рабочих
но именно драйвер обеспечивает заданные задачей/производителем границы
кстати тот драйвер что вам рекомендовали выше это умеет
в принципе вы можете делать как делаете, но во первых ток надо ограничить ибо обмотки на ток более 1а не расчитаны
ну и исходите из того, что крутящий момент будет меньше чем по даташиту и его кривая тоже изменится
Новое в мире полупроводников
Читаем, обсуждаем, задаем вопросы
STMicroelectronics: STSPIN220 — низковольтный драйвер шагового двигателя
 STSPIN220 — это драйвер шагового двигателя, интегрирующий, в компактном 16-выводном корпусе QFN, размером 3 мм х 3 мм, как логическую схему управления, так и силовой каскад на основе полевых транзисторов с малым сопротивлением открытого канала.
STSPIN220 — это драйвер шагового двигателя, интегрирующий, в компактном 16-выводном корпусе QFN, размером 3 мм х 3 мм, как логическую схему управления, так и силовой каскад на основе полевых транзисторов с малым сопротивлением открытого канала.
Встроенный контроллер реализует схему управления по току с ШИМ и фиксированным временем закрытого состояния, а также микрошаговый режим с разрешением до 1/256 шага. Устройство разработано для использования в приложениях с аккумуляторным питанием и может быть принудительно переведено в режим нулевого энергопотребления, позволяющий значительно увеличить время работы системы от источника питания. STSPIN220 поддерживает полный набор функций защиты: от короткого замыкания, перегрузок по току и от перегрева.
Отличительные особенности:
- Диапазон напряжения питания: от 1.8 В до 10 В
- Уровень логического входного сигнала: от В до 5 В
- Максимальный выходной ток: 1.3 А (скз.)
- Общее сопротивление открытого канала для ключей верхнего и нижнего плеча: 0.4 Ом
- Режим формирования микрошага: до 1/256 шага
- Режим управления по постоянному току с регулируемым временем закрытого состояния
- Полный набор функций защиты:
- Защита от перегрузок по току без рассеивания тепла
- Защита от короткого замыкания
- Выключение при перегреве
- Энергоэффективное решение с продолжительным временем работы от аккумуляторной батареи, благодаря току потребления менее 80 нА
Область применения:
- Портативные устройства с питанием от аккумуляторной батареи, оснащенные шаговым двигателем
- Игрушки
- Портативные принтеры
- Роботы
- Терминалы точек продаж
 Инструментальные средства:
Инструментальные средства:
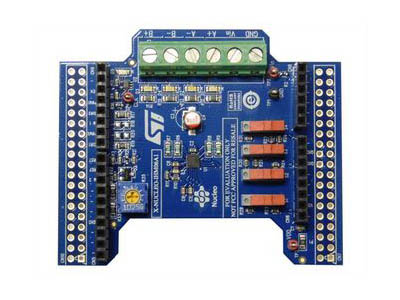
- X-NUCLEO-IHM06A1 — плата расширения низковольтного драйвера шагового двигателя на основе STSPIN220 для платформы STM32 Nucleo.
Представляет собой доступное и простое в использовании решение для управления низковольтными шаговыми двигателями в проектах, создаваемых на платформе STM32 Nucleo, для таких приложений, как термопринтеры, робототехника, игрушки и т.д. Плата оснащена драйвером шагового двигателя, работающим от низковольтного источника питания и поддерживающим состояние с нулевым энергопотреблением. Устройство реализует схему управления по постоянному току с фиксированным временем закрытого состояния силового затвора и максимальным разрешением 1/256 шага.
X-NUCLEO-IHM06A1 совместима с разъёмом Arduino UNO R3 и может дополняться другими платами расширения платформы STM32. Допускается также установка соединителя ST morpho.
 Документация на STSPIN220 (англ.)
Документация на STSPIN220 (англ.)