
Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1
Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Статья относится к принтерам:
Добрый день 3д печатники и ‘колхозники’.
Подключение униполярного шагового двигателя NEMA 23 57HM56-2006 к RAMPS 1.4.
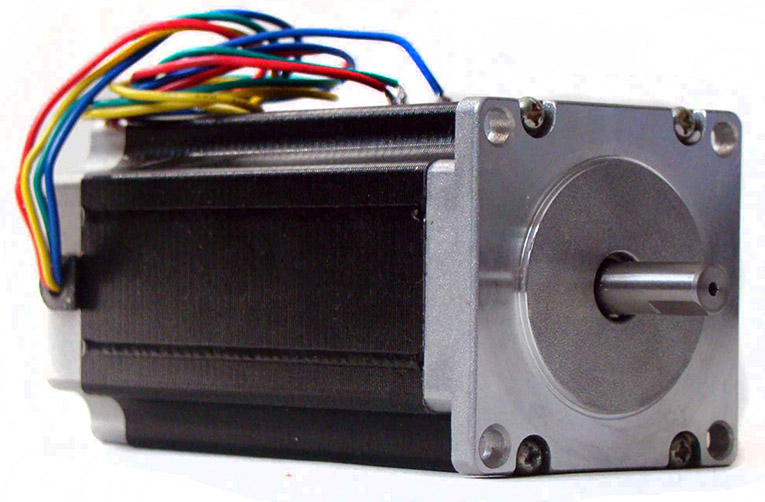
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет шесть проводов, и что бы подключить его к Ramp 1.4 или любой другой плате нам потребуется переделать его из униполярного в биполярный.

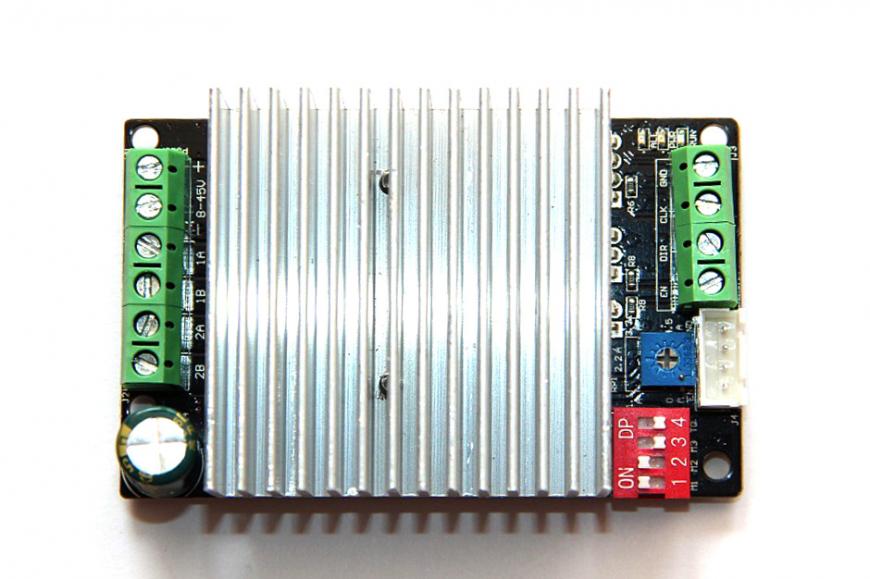
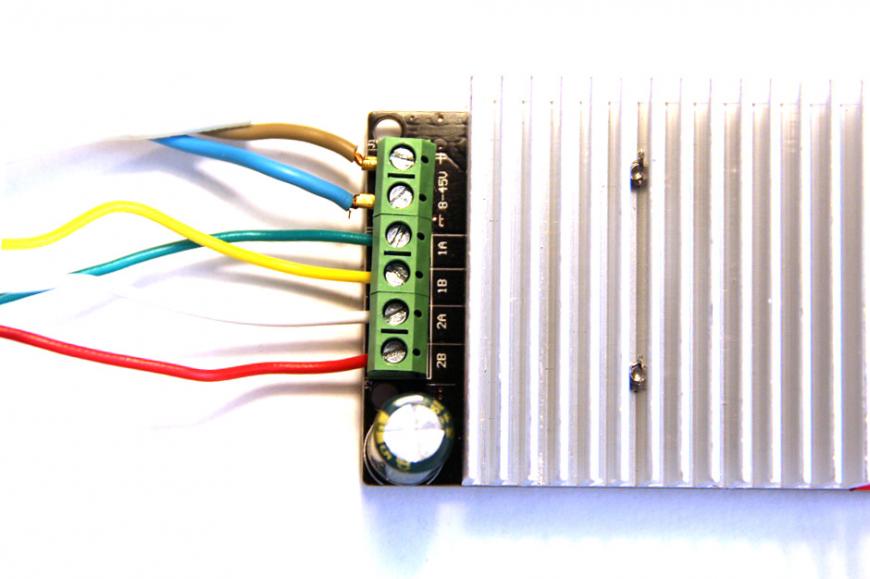
Шаговый униполярный двигатель NEMA 23 57HM56-2006 имеет ток 2 А, поэтому обычный драйвер шагового двигателя A4998 нам не подойдёт. Я буду использовать драйвер ШД TB6600 и плату MKS CD 57/86, что бы подключить его к ramps.
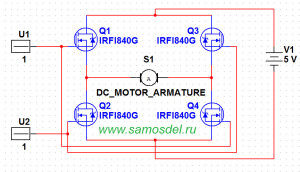
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
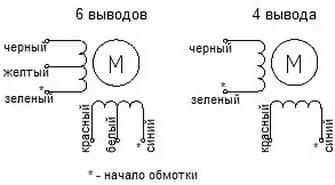
На схеме ниже показаны два двигателя. Слева униполярный, 6 выводов. Справа биполярный, 4 вывода.
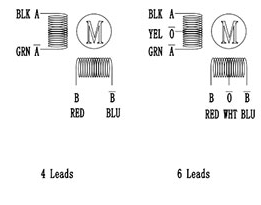
Аналогичная схема ниже, но у же с буквенным обозначением выводов.
Слева биполярный, справа униполярный двигатель.
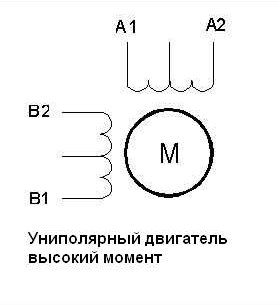
Исходя из схем выше, возможно два варианта переделки униполярного двигателя в биполярный двигатель.
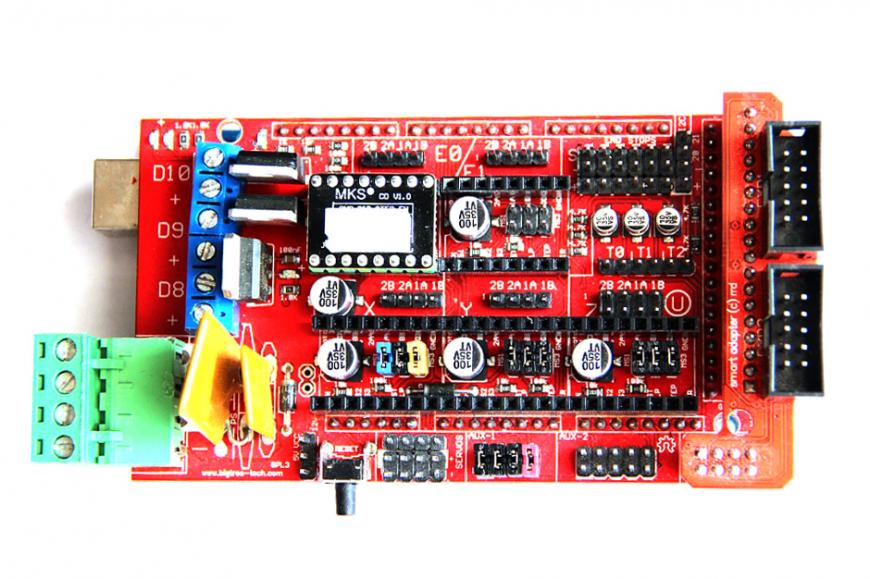
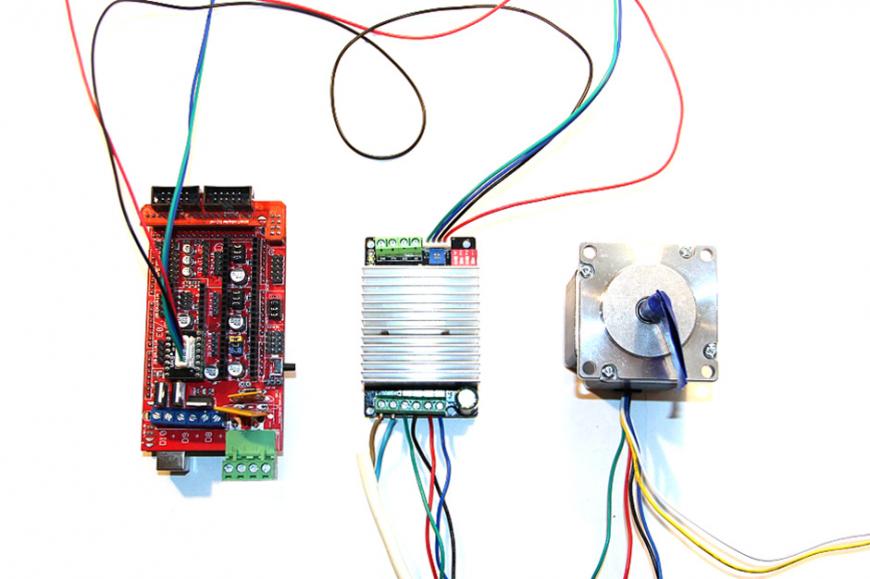
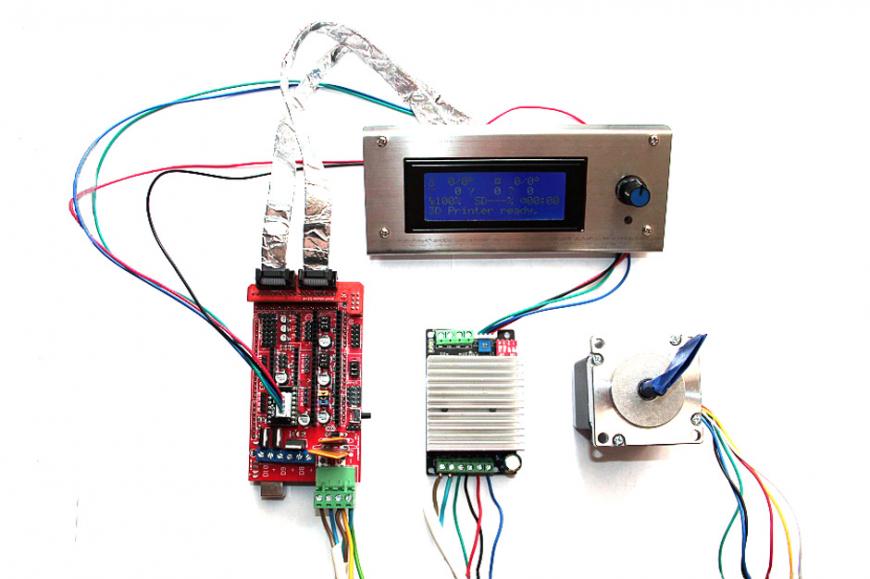
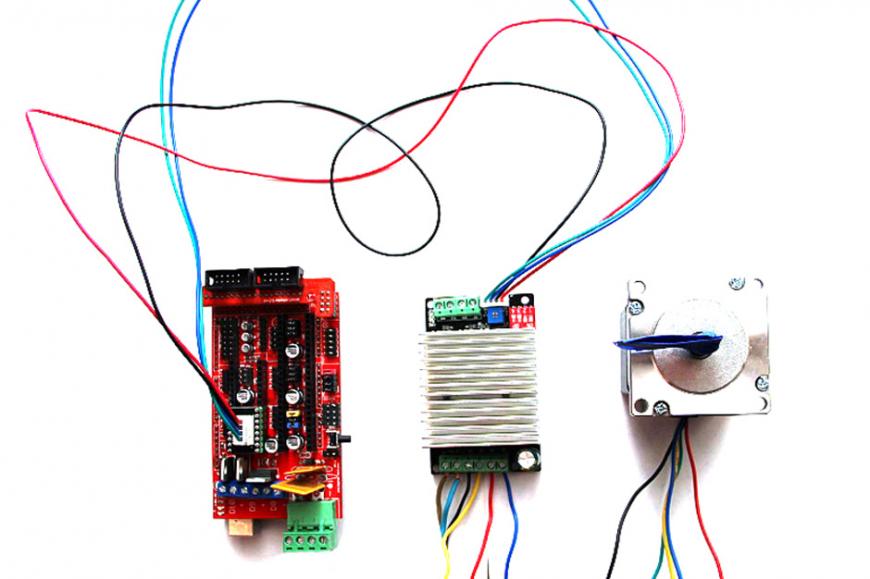
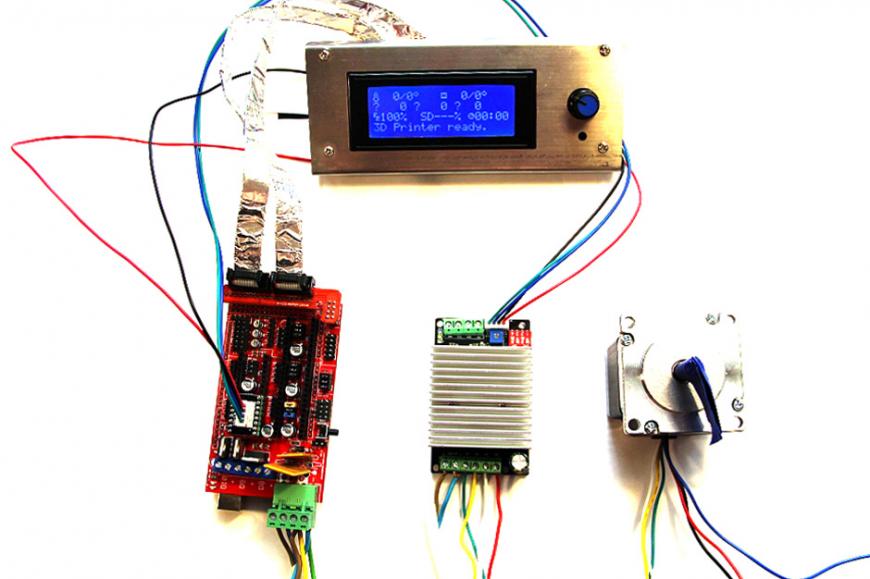
Я соберу тестовый стенд для наглядности, который включает в себя: ramps 1.4, arduino mega 2560, драйвер шагового двигателя TB6600, плата MKS CD 57/86 для внешнего драйвера ШД TB6600, LCD Display 2004, шаговый двигатель NEMA 23 57HM56-2006.
1) Первый вариант. Подключаем двигатель к драйверу не используя центральные выводы в обмотках, то есть желтый и белый. Таким способом подключения мы получим высокий момент.
Пошаговая инструкция для чайников :).
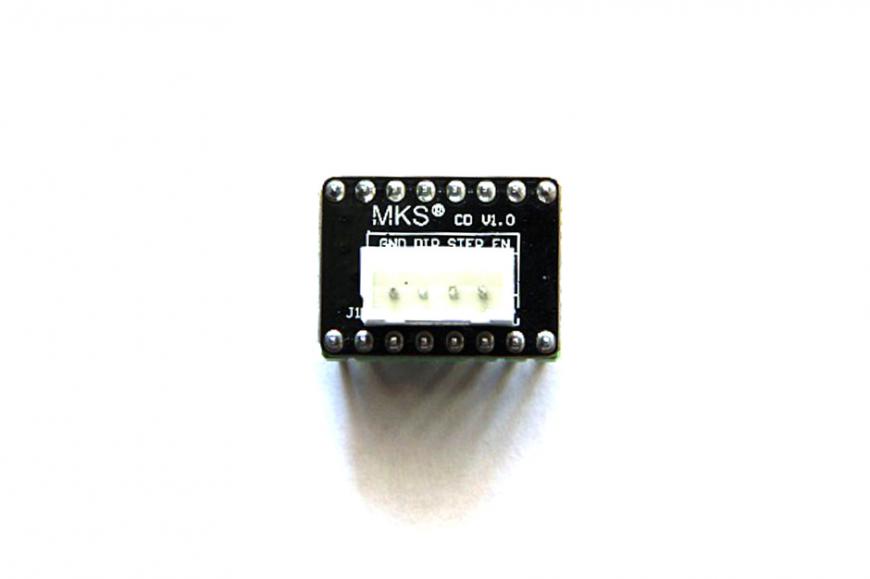
1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.

Пошаговая инструкция уже для опытных мейкеров 8).
1) Устанавливаем плату MKS CD 57/86 в штатный разъем ramps 1.4 для шагового драйвера, соблюдая полярность.
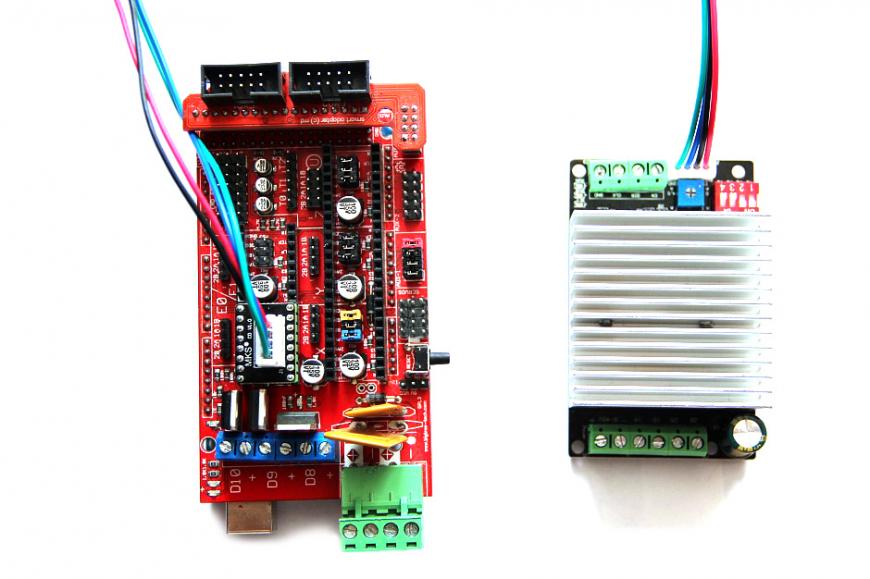
2) Подключаем драйвер шагового двигателя TB6600 к плате MKS CD 57/86 кабелем с разъемом PH-4 и PH-4.
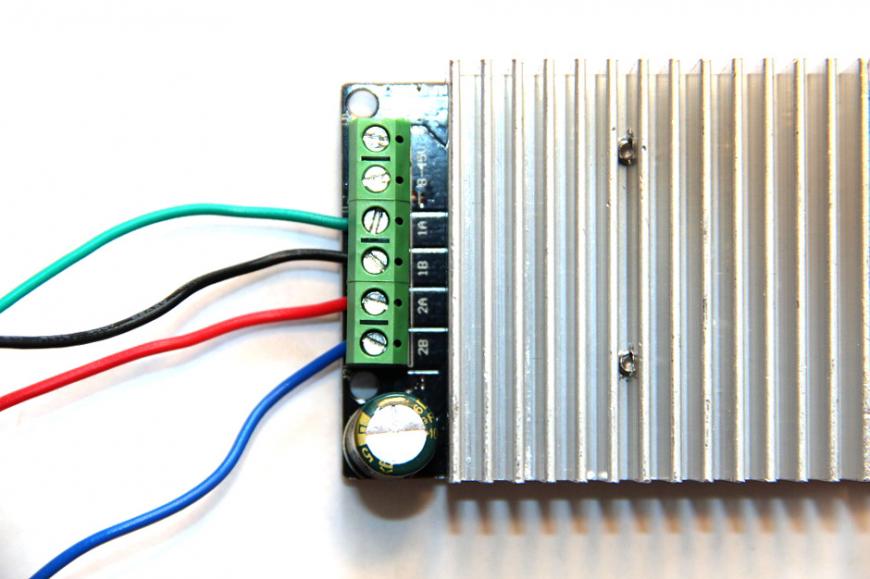
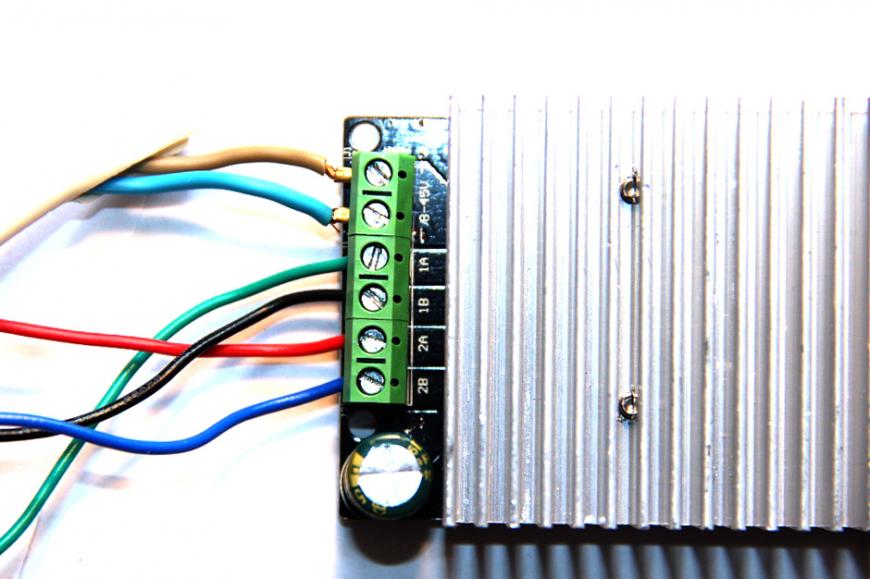
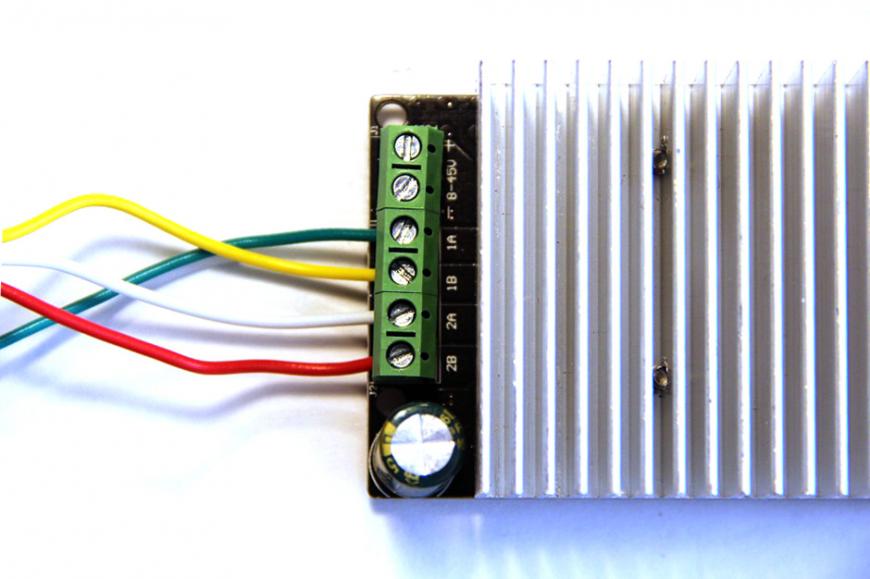
3) Подключаем шаговый двигатель NEMA 23 57HM56-2006 к драйверу ШД TB6600. Зеленый провод в разъём 1A, желтый в разъём 1B, белый в разъём 2A, красный в разъём 2B. Черный и синий провода лучше заизолировать, не ну если Вам нравится прыгать с бубном то не делайте этого.
Таким образом, подключить униполярный шаговый двигатель к ramps 1.4 не так уж и сложно, достаточно немного знать теории и быть внимательным. Надеюсь, что теперь Вам помощь бубна в этой теме не потребуется ;).
Шаговые двигатели. Введение в тему.
Назначение шагового двигателя

Шаговый двигатель — это электрическая машина, способная преобразовывать электрическую энергию, подаваемую на его обмотки, в ограниченное угловое перемещение ротора и обеспечивающая стабильность его углового положения. Иными словами, шаговый электродвигатель, в отличие от других электродвигателей, способен совершать не только непрерывное вращение, но и поворот ротора на заданный угол, а при необходимости и удерживать заданный угол поворота постоянным.
Угол поворота, на который поворачивается ротор шагового электродвигателя при подаче одного электрического импульса на его обмотки, называется угловым шагом. Для совершения нескольких непрерывных угловых шагов (для поворота более чем на один угловой шаг) на обмотки шагового двигателя необходимо подать непрерывную последовательность электрических импульсов. Для непрерывного вращения ротора такого двигателя импульсы, подаваемые на его обмотки, должны идти непрерывно. Несмотря на наличие возможности непрерывного вращения шаговые двигатели все же не предназначены для работы в этом режиме.
К сведению: Импульс электрического тока, подаваемый на обмотки шагового двигателя, представляет собой по сути однократную смену полярности электрического тока.
Благодаря возможности поворачивать ротор лишь на некоторый, достаточно маленький угол, шаговые двигатели нашли широкое распространение в механизмах точного перемещения рабочих органов, используемых в:
- станкостроении;
- робототехнике;
- средствах измерений, контроля и испытаний;
- системах автоматического управления (САУ) и регулирования (САР);
- в системах типа «Умный дом»;
- в приводах накопителей информации на гибких, жестких и оптических дисках;
- в прочих системах, где требуются точные перемещения.
Основные технические характеристики шаговых двигателей
К основным характеристикам шаговых двигателей, на которые следует обращать внимание при их выборе, относят:
- число шагов на один полный оборот,
- величина единичного углового шага [°],
- максимальный крутящий момент [Н·м],
- номинальный ток обмоток [А],
- тип шагового двигателя (конструкция, схема включения обмоток),
- типоразмер шагового двигателя,
- диаметр выходного вала ротора,
- способ передачи крутящего момента.
Кроме того, в процессе проектирования новых технических средств при выборе шагового двигателя учитывают его габаритные размеры, возможность установки датчика обратной связи (энкодера), сопротивление обмоток, индуктивность обмоток, рабочий диапазон температур и пр.
Важнейшей характеристикой ШД является величина его углового шага. Величина углового шага влияет на точность перемещений исполнительного органа, приводимого в движение шаговым электроприводом. Эта характеристика тесня связана с другой характеристикой ШД — количеством шагов на один полный оборот двигателя. Одну из этих характеристик обязательно указывают в паспорте к шаговому двигателю или даже в обозначении его модели. Например, название ДШИ-200 говорит, что ротор этого двигателя совершает один полный оборот за 200 шагов (200 импульсов, поданных на его обмотки). Несложно подсчитать, что при числе шагов на один оборот вала ротора ШД один угловой шаг для него соответствует 1,8°.
Для иностранных двигателей характерно в названии модели указывать габаритные размеры двигателя. Например, в маркировке двигателя ST57-76 первое число говорит о ширине квадрата присоединительного фланца (57х57 мм), а второе число указывает на длину корпуса двигателя без учёта длины вала (76 мм).
Общее устройство шаговых двигателей
Шаговые двигатели не содержат щёточно-коллекторного узла, как асинхронные электродвигатели переменного тока. В конструкцию ротора двигателя встроена система постоянных магнитов. Статор двигателя содержит набор обмоток. Схема простейшего шагового электродвигателя, поясняющая принцип его работы, представлена на следующем рисунке. Четыре обмотки и двухполюсный ротор позволяют обеспечить двигателю всего четыре шага на один полный оборот, то есть величина углового шага такого ШД составляет 90°.

Если последовательно подавать на обмотки такого двигателя электрический ток, то взаимодействие поля постоянного магнита с полем обмотки статора будет вызывать поворот ротора в направлении, соответствующем направлению смены активных обмоток, как это показано на следующей схеме. Схема демонстрирует последовательность из четырёх состояний шагового двигателя, каждое из которых характеризуется изменением активной обмотки статора и новым угловым положением ротора.

Принцип управления углом поворота вала ротора шагового двигателя с помощью одной активной обмотки называют волновым. Волновое управление ШД обеспечивает низкое энергопотребление, однако оно применяется редко, так как при этом существенно снижается и максимальный развиваемый двигателем вращающий момент.
Конструктивно шаговые двигатели могут быть различными. В простейшем случае шаговый двигатель содержит ротор с постоянным магнитом. По мере усложнения число полюсов ротора возрастает, всегда оставаясь чётным.
Другим типом ШД является двигатель с переменным магнитным сопротивлением. Ротор такого электромотора не содержит магнитов, но состоит из диска из магнито-мягкого материала. Диск на периферии содержит специальные выступы, приобретающие намагниченность в процессе работы от воздействия электромагнитного поля токов, протекающих в обмотках статора. У такого двигателя статор всегда содержит более четырёх обмоток. Отсутствие постоянного магнита отрицательно сказывается на развиваемом вращающем моменте, но также исключает эффект торможения, свойственный предыдущему типу двигателя.
Сочетание постоянных магнитов на роторе двигателя и ротора из магнито-мягкого материала привело к созданию гибридных шаговых двигателей. В них в меньшей степени проявляются недостатки предыдущих конструкций. Кроме того, гибридные ШД обеспечивают наименьшие угловые шаги и высокую точность поворота.
Схемы подключения шаговых двигателей
Производимые промышленностью шаговые двигатели изготавливают с разным числом выводов, что связано со схемами их предполагаемого подключения к управляющим драйверам. Исходя из схемы подключения различают биполярные, униполярные и универсальные шаговые двигатели.
Биполярные двигатели содержат всего четыре вывода для подключения к драйверу. В таких двигателях противоположные обмотки соединены последовательно. И для их питания требуются специальные мостовые схемы.

На одну пару выводов такого двигателя приходится одна мостовая схема, содержащая четыре ключевых элемента (транзистора). Для управления биполярным двигателем электронный драйвер содержит две мостовые схемы. Изменения полярности напряжения на выводах ШД добиваются попарным включением ключевых элементов, установленных в противоположных плечах моста.

Униполярные шаговые двигатели содержат шесть (иногда пять) выводов, как показано на рисунках ниже. Дополнительные выводы идут от точек соединения противоположных обмоток, благодаря чему появляется возможность независимого управления каждой из них без использования сложных мостовых схем. При этом реализуется так называемый волновой режим с присущими ему достоинствами и недостатками.


Униполярный двигатель может с успехом использоваться и при его подключении в биполярном режиме, когда его средние выводы просто остаются незадействованными. Это актуально особенно в связи с тем, что современные драйверы для биполярных шаговых двигателей позволяют расширять штатные возможности двигателей за счёт микрошагового режима управления. Однако следует иметь ввиду, что для подключения к мостовым схемам драйверов биполярных двигателей годятся лишь униполярные шаговые двигатели с шестью выводами!
Если каждая из четырёх обмоток шагового двигателя имеет независимую пару выводов, то такой двигатель относят к универсальным. Смотрите схему ниже.

Основные принципы управления шаговыми электродвигателями
Режим полношагового управления ШД
Одним из простейших способов управления шаговым двигателем является полношаговое управление, при котором питание подаётся одновременно на две противоположные обмотки. Полярность напряжения на обмотках должна быть одинаковой, чтобы магнитная цепь, образованная статором и ротором была последовательной (см. рисунок).

При полношаговом способе управления присоединение обмоток к источнику питания может быть любым, как последовательным, так и параллельным. Последовательное соединение обмоток потребует удвоенного напряжения питания для достижения номинального тока в обмотках и развития требуемого вращающего момента на валу электродвигателя. В случае параллельного соединения активных обмоток статора напряжение питания может быть ниже, но при этом уменьшается суммарное сопротивление обмоток, а следовательно, в два раза возрастает ток, потребляемый двигателем от источника питания.
Режим полношагового управления позволяет ШД обеспечить наибольший развиваемый крутящий момент на валу!
Режим полушагового управления ШД
Как было описано выше, количество шагов на один полный оборот шагового двигателя влияет на точность перемещения рабочего органа аппарата, в котором этот двигатель используется. Самые простые современные схемы управления шаговыми двигателями (драйверы шаговых двигателей) способны удвоить число шагов ШД за счет функции деления шага. При этом используется так называемый полушаговый способ управления шаговым двигателем. В промежуточные моменты между основными положениями активных обмоток статора производится подача напряжения питания на все четыре обмотки таким образом, что ротор двигателя может остановиться в промежуточном положении между двумя обмотками, как это показано на следующем рисунке.

То есть используя режим полушагового управления двигателем с номинальным числом шагов на оборот 200 шт. можно получить величину углового шага не 1,8°, а 0,9°, что соответствует 400 шагам!
Волновой полушаговый принцип управления ШД
Может иметь место также и волновой полушаговый режим управления двигателем. В этом режиме одновременно работают не боле двух обмоток, позволяя делить угловой шаг пополам, но снижая развиваемый крутящий момент на валу. Схема полушагового волнового режима приведена ниже.

Благодаря развитию современных средств микроэлектроники появилась возможность реализовать наиболее продвинутый режим управления шаговыми двигателями — микрошаговый. В этом режиме на смежные обмотки двигателя подаются электрические сигналы, отношение которых пропорционально величине деления номинального угла поворота статора. Физически подаваемые электрические сигналы напоминают синусоиды, смещенные по фазе друг относительно друга и дискретизированные по величине. При этом изменяется фаза сигналов, подаваемых на разные обмотки, и ротор позиционируется между полюсами статора в положении, пропорционально токам, действующим в смежных обмотках.
Режим микрошагового управления хорош тем, что обеспечивает высокую плавность вращения ротора двигателя, высокую точность перемещения, низкий уровень шума. Недостатком данного способа управления ШД является снижение развиваемого вращающего момента. Причём, чем больше коэффициент деления шага, тем развиваемый момент на валу ШД будет меньше. Использование современной элементарной базы и аппаратных методов регулирования тока позволяет частично компенсировать этот недостаток. А благодаря возможности существенно повысить точность перемещений исполнительных механизмов режим микрошагового управления шаговыми двигателями занял существенную нишу в современной технике.

Современные схемы управления шаговыми двигателями (драйверы) обеспечивают режим микрошага 1/4, 1/8, 1/16, 1/32, 1/64 и более!
Как сделать драйвер биполярного шагового двигателя ARDUINO
Недавно приобрел ARDUINO в Китае. Мыслей по изготовление различных устройств- море. Мигать светодиодом на плате очень быстро надоело, захотелось чего то более существенного. Конечно надо бы заказать набор но цена его несколько завышена и пришлось что то искать в интернете, что то придумывать самому. В итоге все равно заказал в том же Китае различные датчики, реле, индикаторы… Немного попозже пришел знаменитый индикатор 1602. С ним поучился работать, тоже довольно быстро освоился. Захотелось поуправлять шаговым двигателем от CD-DVD привода. Ждать с Востока посылку 1-2 месяца не захотелось и я решил попробовать сделать драйвер самостоятельно. Нашел вот такую схему включения биполярного шагового двигателя:
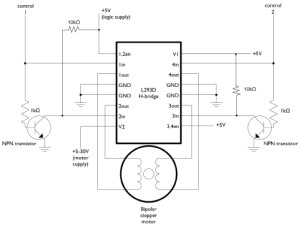 Схема включения биполярного шагового двигателя на микросхеме L293D
Схема включения биполярного шагового двигателя на микросхеме L293D
Микросхемы в нашей глуши я не нашел, или заказывать микросхемы в российских интернет-магазинах по стоимости 2-3 готовых драйверов за 1 микросхему. Микросхема представляет собой Н- мост из транзисторов. Кстати включать в мост надо или составные биполярные транзисторы (так называемые сборки Дарлингтона), или полевые транзисторы. Одиночным биполярным транзисторам нужна хорошая раскачка, которую контроллер дать не может, иначе получается очень высокое падение напряжение на транзисторе из за того что он открыться не может. Т.к. хороший товарищ занимается ремонтом компьютеров, то с полевиками проблем не возникло. Сначала хотел сделать на биполярниках- но получается в 2 раза больше транзисторов, что не совсем хорошо для габаритов драйвера, да и ток они выдержат гораздо меньший. Выпаяв около десятка полевых транзисторов и почитав на них даташиты я снова впал в уныние- в интернете есть схемы только на парах полевых транзисторов n- и p- типов. И ниодной схемы на транзисторах одного типа я просто не нашел. В компьютерах же используются транзисторы n- типа. Пришлось мудрить на макетной плате небольшой девайс на полевиках, попробовал управлять светодиодами, получилось и я решил собрать готовое устройство. Драйвер не нуждается в налаживании ибо налаживать здесь практически нечего. Единственная проблема возникла с программным обеспечением. Нашел даташит на похожий двигатель и по графикам работы выставил состояния выходов. После этого осталось только подобрать delay и все- устройство готово! Собственно схема замены микросхемы L293D.
 Драйвер на полевых транзисторах n-типа
Драйвер на полевых транзисторах n-типа
Данные транзисторов даны просто так- в мультисиме никак не смог их изменить. Я использовал транзисторы P60N03LDG в корпусе ТО-252 . В ней все довольно просто: при поступлении напряжения на один из входов U1 или U2 открываются 2 транзистора в верхнем и нижнем плече, причем крест- накрест. Таким образом переключается полярность напряжения на двигателе. А чтобы не подавалось напряжение сразу на 2 входа (это вызовет КЗ цепи питания) и использовал схему включения L293D. При таком включении NPN-транзистор не позволяет открывать сразу все 4 транзистора Н-моста. Кстати 1 двигатель будет управляться по 2 выходам Arduino, что крайне важно для экономии выходов и входов микроконтроллера. Еще условие- минусовой провод транзисторных ключей обязательно должен быть соединен с минусовым выводом платы управления. Питание подается на плату управления от Arduino, на ключи- от внешнего БП. Это позволяет подключить достаточно мощные двигатели. Все зависит от характеристик транзисторов. Итак для одного драйвера вам нужно 8 полевых транзисторов (P60N03LDG или любые другие n-канальные), любые 2 SMD-биполярных транзистора NPN (у меня стоят с маркировкой t04), smd-резисторы типоразмера 0805, и 4 такие же перемычки того же размера (на них написано 000 или просто 0). Все эти детали можно найти на старых и негодных материнских платах. Обязательно проверьте детали перед установкой.
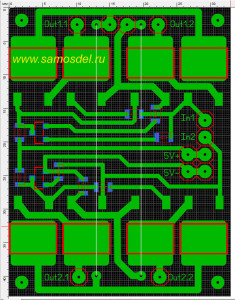 Плата драйвера Arduino
Плата драйвера Arduino
Выкладываю плату в формате Layout6. Плата драйвера скачать. Замечу что у вас должен получится именно такой вид- надписи должны быть читабельными а не перевернутыми, учитывайте это при печати платы, детали ведь будут установлены со стороны дорожек. Разъемы тоже выпаиваем из материнки феном, отрезаем сколько по надо количеству пинов и впаиваем в нашу плату- так гораздо удобнее и надежнее нежели чем паять провода в плату. Разберемся с назначением выводов: выводы Out1 и Out2- подключение обмоток шагового двигателя, In1,2- вход от Arduino, ±5V- питание управления от Arduino (сделал двойной разъем т.к. подключать питание можно шлейфом сразу к нескольким блокам), 2 перемычки располагаются на другой стороне платы, по ним подается напряжение на ключи. Размер платы- 43х33мм. Кто желает- может еще больше минимизировать.
Разберемся с программным обеспечением для шагового двигателя. Для любого шагового двигателя необходимо найти даташит или, на худой конец, диаграмму его работы. Я нашел только диаграмму, она выглядит так:
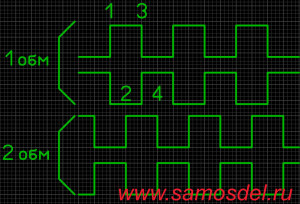 Диаграмма работы шагового двигателя
Диаграмма работы шагового двигателя
Цифрами указаны номера шагов. Исходя из того что при переключении контроллером высокого уровня на низкий драйвер сам переключит нужные ключи, то пишем, например, состояния только для верхних графиков каждой обмотки. Первый шаг: первая обмотка- первый провод +(HIGH), другой автоматически переключится драйвером на минус (LOW), напоминаю что описываем по первому проводу каждой обмотки. Вторая обмотка: первый провод — (LOW), второй + (HIGH), второй провод переключится драйвером автоматически. Переходим к первому изменению графика. Это 2 шаг. Описываем состояние только первых проводов. 1 провод первой обмотки остался HIGH, 1 провод второй сменился с LOW на HIGH . Третий шаг- 1 провод первой обмотки сменился HIGH на LOW, 1 провод второй остался HIGH. Четвертый шаг: 1 провод первой обмотки остался LOW, 1 провод второй обмотки сменился с HIGH на LOW. Описывать можно с любого шага, главное сохранять последовательность. Чтобы двигатель вращался в другую сторону нужно просто сдвинуть в диаграмме значения любой обмотки на полцикла в любую сторону. Таким образом можно писать программное обеспечение для драйверов. Нужно лишь знать диаграмму и правильно описать ее состояние на выходные пины.
Теперь подключаем плату к Arduino, двигателю. Забрасываем такой скетч:
// подключаемся к 8,9 выводам arduino
int input1 = 8;
int input2 = 9;
int stepCount = 5; //задержка между шагами регулирует скорость двигателя
void setup()
<
pinMode(input1,OUTPUT);
pinMode(input2,OUTPUT);
>
void loop()
<
//1-ый шаг
digitalWrite(input1,LOW);
digitalWrite(input2,HIGH);
delay(stepCount);
//2-ой шаг
digitalWrite(input1,HIGH);
digitalWrite(input2,HIGH);
delay(stepCount);
//3-ий шаг
digitalWrite(input1,HIGH);
digitalWrite(input2,LOW);
delay(stepCount);
digitalWrite(input1,LOW);
digitalWrite(input2,LOW);
delay(stepCount);
Подаем питание на драйвер, меняем, если надо, выводы одной обмотки и думаем куда приспособить данный девайс (можно открывать по времени и температуре форточки в теплице, управлять жалюзи и многое другое). Обращаю внимание что двигатель будет крутиться без остановки по данному скетчу, если надо- загоните в цикл и крутите на требуемое значение или, что еще лучше, напишите библиотеку и подключайте ее напрямую. Конечно это не такой крутой драйвер как на микросхеме, но для экспериментов, пока идут нормальные драйверы из Китая, его более чем достаточно. Всем удачи и успехов в осваивании микроконтроллеров. Подробнее о микроконтроллерах ARDUINO читайте ЗДЕСЬ.
Добавить комментарий Отменить ответ
Для отправки комментария вам необходимо авторизоваться.
Шаговый биполярный двигатель схема включение
Биполярный шаговый двигатель (ШД) относятся к виду/классу бесколлекторных двигателей непрерывного (постоянного) тока. Как любые бесколлекторные двигатели – ШД имеют большой срок службы и достаточно высокую надежность, что позволяет использовать их в крайне критичных применениях (например, индустриальных).
Сравнение биполярных шаговых двигателей с традиционным двигателем
Если сравнивать шаговые двигатели с традиционными двигателями постоянного тока, то, безусловно, первые требуют более сложных (причем значительно сложных) схем управления, которые в свою очередь должны выполнять, совершенно все коммутации обмоток во время работы двигателя. Кроме того, сам ШД достаточно дорогостоящее устройство, поэтому, где чрезмерно точное позиционирование не требуется, обычные коллекторные двигатели в таких случаях имеют заметное и явное преимущество. Следует отметить, что для управления коллекторными двигателями в последнее время все чаще и чаще применяют специальные контроллеры, практически не уступающие по сложности и восприятию контроллерам ШД.
Преимущества шагового двигателя фрезерного станка с ЧПУ
Одним из основных существенных преимуществ шаговых двигателей, безусловно, является возможность реализовывать точное позиционирование и соответственно регулировку скорости, причем без датчика обратной связи. Данный факт очень важен, потому как эти датчики могут в разы превышать себестоимость самого двигателя. Но это подходит исключительно для систем, работающих при малом ускорении и к тому, же с относительно постоянной нагрузкой. Однако в это же время системы, обладающие обратной связью вполне способны работать с достаточно большими ускорениями, причем, при переменном характере нагрузок. Если нагрузки шагового двигателя превысят его момент, то соответственно информация о положении его ротора теряется, а система требует обязательного базирования с помощью, к примеру, либо концевого выключателя, либо же другого датчика. Таким образом, системы с обратной связью абсолютно не имеют подобного недостатка.
Что выбрать сервомотор или шаговый двигатель
Во время проектирования конкретных систем приходится выбирать между сервомотором и непосредственно шаговым двигателем. Когда требуется точное управление скоростью и прецизионное позиционирование, а скорость и требуемый момент не выходят за дозволенные пределы, то здесь наиболее экономичным решением является, конечно же, ШД. Как и для традиционно-обычных двигателей, для повышения требуемого момента может быть применен понижающий редуктор. Однако в некоторых случаях для шаговых двигателей такой редуктор не всегда приемлем.
В отличие от коллекторных двигателей, у которых момент растет с постоянным увеличением скорости, шаговый двигатель обладает большим моментом на низких скоростях. При этом шаговые двигатели имеют существенно меньшую максимальную скорость, если сравнивать их с коллекторными, что, безусловно, ограничивает максимальное передаточное число и, конечно же, увеличение момента при помощи редуктора.
Использование и применение шагового двигателя
Готовые ШД с редукторами, хотя в настоящее время и существуют, но на сегодняшний день – являются экзотикой. Еще одним значимым фактором, ограничивающим применение редуктора, выражается в присущему ему люфту. Вероятность получения низкой частоты вращения достаточно часто является основной причиной того, что сами разработчики не в силах спроектировать качественный редуктор, используют шаговые двигатели НЕоправданно часто. При этом коллекторный двигатель обладает более высокой удельной мощностью, весьма низкой стоимостью и достаточно простой схемой управления. А одновременно с одноступенчатым червячным редуктором коллекторный двигатель способен обеспечить такой же диапазон скоростей, как и непосредственно – шаговый двигатель. Ко всему прочему, при всем этом обеспечивается существенно больший момент.
Приводы на основании коллекторных двигателей весьма и весьма часто используются в технике военного предназначения, что косвенно доказывает их отличные параметры качества и высокую надежность. В современных автомобилях, бытовой технике, промышленном оборудовании коллекторные двигатели достаточно сильно распространены. Но, тем не менее, шаговые двигатели имеют свою хоть и довольно узкую, но эффективно впечатляющую сферу применения, где они – просто незаменимы!

