Подключение шагового двигателя FL86STH65-2808A к микроконтроллеру
Подключение шагового двигателя FL86STH65-2808A к микроконтроллеру.
Попал ко мне в руки на днях шаговый двигатель FL86STH65-2808A с драйвером SMD-4.2, задача была научиться управлять ним, используя микроконтроллер.
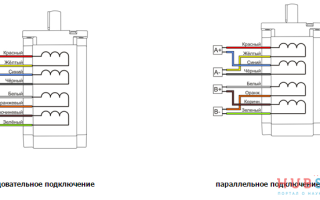
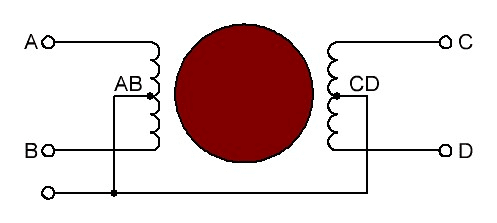
Первым делом надо подключить двигатель к драйверу, из двигателя выходит 8 проводов и их можно соединить двумя способами, как показано на картинке ниже.
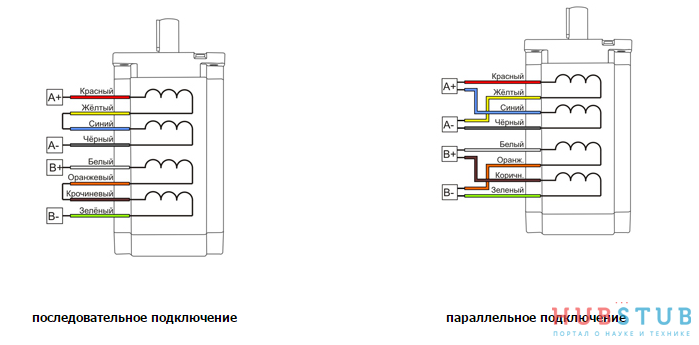
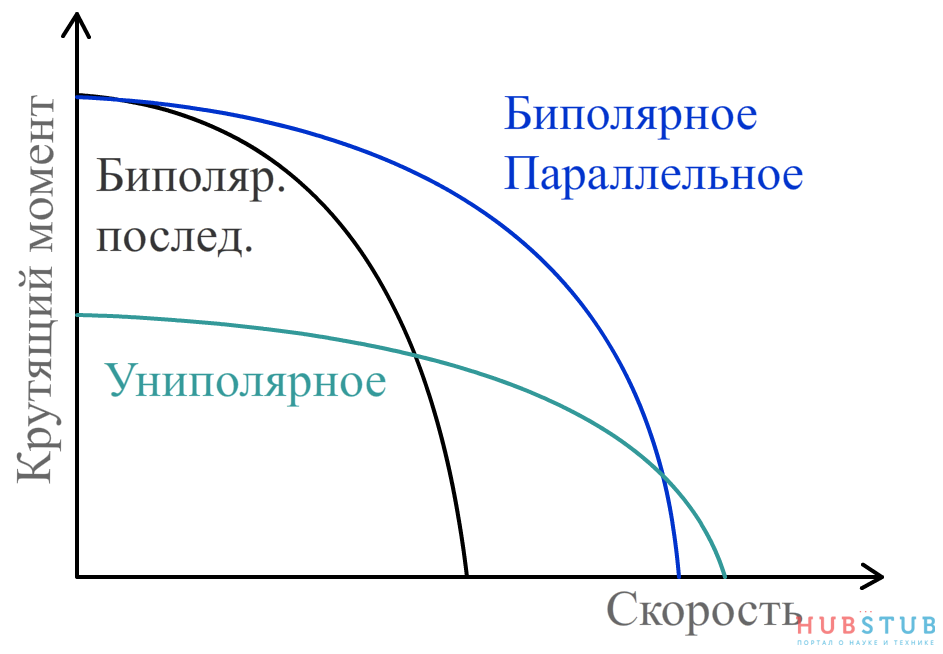
При последовательном соединении обмоток максимального момента можно добиться только на низких скоростях, при этом энергопотребление будет низким, плюс параллельного соединения проявляется на высоких скоростях — момент падает медленнее чем при последовательном, минус — в более высоком энергопотреблении. Зависимость графика от момента показа на картинке ниже.
В моём случае важно чтобы двигатель обладал достаточным моментом на высоких скоростях, поэтому соединил обмотки параллельно.
Скручиваем провода между собой и зажимаем их в клеммнике.
Для получения нужного тока был специально приобретён блок питания на 48 вольт, но для тестов можно использовать обычный компьютерный блок питания.
Что имелось в виду под получением нужного тока?
Так как мы соединили обмотки двигателя параллельно, то ток, протекающий через двигатель, равен Iфазы * √2 или 1.4*Iфазы. Понять это очень просто,в документации указывается рабочий ток обмотки/фазы и её сопротивление. Максимальная мощность потребляемая двигателем, остаётся одинаковой при параллельном и последовательном включении обмоток и равна
При параллельном соединении обмоток, полное сопротивление двигателя в 2 раза меньше сопротивления обмотки, давайте подставим его в формулу
Что и требовалось доказать.
Силовые линии подключили, осталось подключить сигнальные. Для управления двигателем используются три сигнала: ENABLE, DIR и STEP, если перевести их названия, становится понятно какой за что отвечает. Для тех кто учил немецкий разъясню, уровень сигнала DIR определяет направление вращения, по каждому фронту сигнала STEP делается шаг. Отключение обмоток двигателя осуществляется при переходе сигнала ENABLE с низкого в высокое состояние. Ниже изображена осциллограмма управляющих сигналов.

Если посмотреть на драйвер, то можно увидеть, что под управляющие сигналы выделены 6 входов, вместо трёх, это сделано для того, чтобы можно было управлять вращением двигателя сигналами любой полярности.
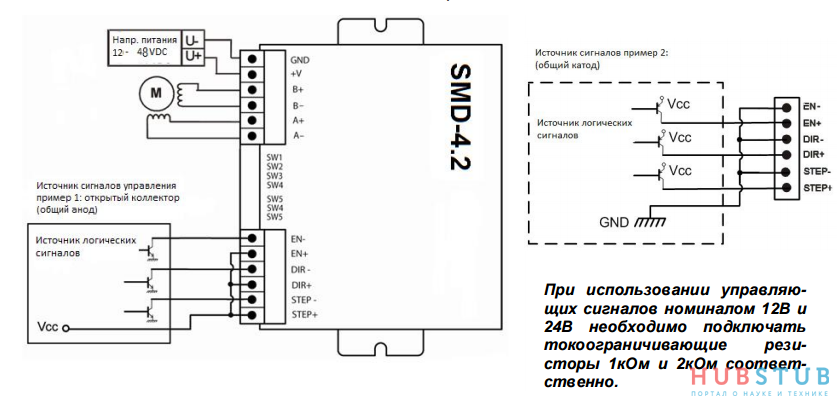
Ток, протекающий через сигнальные линии может быть от 10 до 16mA, поэтому их можно напрямую подключать к выводам МК.
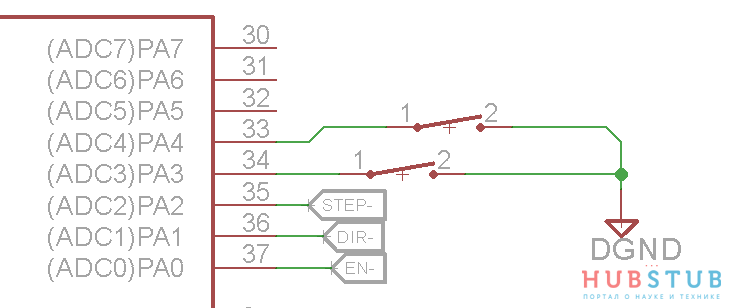
В качестве источника, управляющих сигналов, выберем схему с открытым коллектором, ниже изображена схема подключения драйвера к Atmega16.
Теперь давайте напишем код, чтобы при нажатии на одну кнопку двигатель вращался в одну сторону, при нажатии другой кнопки в другую.
Как подключить электродвигатель?
Часто бывает так, что нужно найти схемы подключения электродвигателя к сети для случаев, которые не согласовываются с паспортными данными оборудования. Двигатель подключенный по таким схемам имеет пониженный КПД, но это иногда бывает оправданным. В этой статье расписаны самые доступные и технически обоснованные схемы подключения асинхронного двигателя к однофазной и трехфазной сети.
Подключение однофазного электродвигателя

Рисунок 1. Схемы включения однофазного асинхронного двигателя
В случае, если в однофазном электродвигателе оставить только одну обмотку (по числу фаз), то магнитное поле статора станет пульсирующим, а не вращающимся, и пуска или толчка при включении двигателя не будет, если ротор не раскручивать вручную. Чтобы исключить ручное вмешательство, добавляют вспомогательную обмотку – пусковую. Это вторая фаза, сдвинутая на 90 градусов, которая в момент включения раскручивает ротор, но, так как двигатель подключен к однофазной сети, его называют однофазным. Другими словами, однофазные асинхронные электродвигатели имеют рабочую и пусковую обмотки. Вторая нужна лишь для запуска ротора поэтому ее включают на короткое время (до 3 секунд), в то время, как рабочая включена постоянно. Если нужно определить выводы обмоток, можно воспользоваться тестером. Для запуска, требуется на обе обмотки подать 220 Вольт, а после выхода на рабочие обороты электродвигателя отключить пусковую. Чтобы добиться сдвига фазы используют омические сопротивления, конденсаторы и индуктивности. Сопротивление при этом не обязательно должно быть в виде отдельного резистора, оно может быть и частью пусковой обмотки, намотанной по бифилярной технологии, когда индуктивность катушки не изменяется, а её сопротивление растет за счет большей длины медного провода. Схема подключения и соотношение обмотки и общего вывода однофазного электродвигателя показана на рис. 1.
Рабочая и пусковая обмотки могут быть постоянно подключены к электросети. Такие двигатели, можно сказать, являются двухфазными. Магнитное поле вращается внутри статора. Конденсатор в этом случае служит для сдвига фаз. Здесь как рабочая, так и пусковая обмотки выполнены проводом одинакового сечения.
Как подключать трехфазный электродвигатель
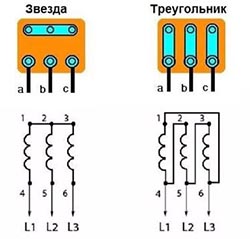
Рисунок 2. Схема подключения: звезда, треугольник
Трехфазные двигатели более эффективны, в сравнении с однофазными и двухфазными. Вращающееся магнитное поле в статоре образуется сразу после включения в сеть 380 вольт, и при этом не задействованы никакие пусковые устройства. Схемы подключения электродвигателя звездой и треугольником — самые распространенные (рис. 2).
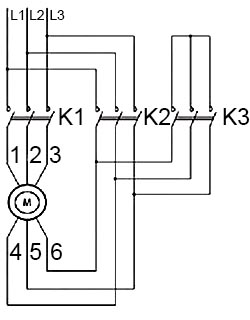
Рисунок 3. Схема включения звезда-треугольник
Также нужно сказать, что подключение звездой делает пуск плавным, но снижает мощность работы электродвигателя. Подключении треугольником позволяет вывести двигатель на полную паспортную мощность, что в 1,5 раза выше чем при подключении звездой, но пусковой ток, в таком случае, вырастет настолько, что может повредить изоляцию проводов. Поэтому мощные двигатели подключают по комбинированной схеме подключения звезда-треугольник. Пуск осуществляется по схеме звезда (небольшие пусковые токи), а после выхода на рабочий режим схема автоматически или вручную переключается на схему треугольник, что повышает мощность двигателя в 1,5 раза (мощность приближается к номинальной). Для переключения используют магнитные пускатели, пакетный переключатель или пусковое реле времени. Схема подключения к сети 380 вольт показана на рис. 3. При замкнутых ключах К1 и К3 двигатель подключен по схеме звезда, а при замкнутых ключах К1 и К2 двигатель включен по схеме треугольник. Подключение трехфазного двигателя к однофазной сети через конденсатор (380 на 220).
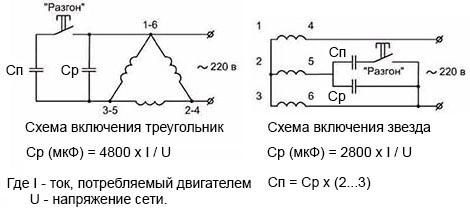
Рисунок 4. Включения трехфазного двигателя в однофазную сеть по схеме: треугольник, звезда.
Очень часто бывает так, что нужно подключить трёхфазный двигатель к сети 220 Вольт. Несмотря на то, что КПД снижается до 50 % (бывает и до 70%), такая переделка иногда нужна. Двигатель, в таком случае, начинает работать как двухфазный. Осуществляется это по схеме звезда или треугольник с использованием рабочего и пускового конденсатора, которые требуются для сдвига фазы и разгона (рисунок 4). Кнопку разгона удерживаем до максимального раскручивания ротора, после чего отпускаем.
Под нагрузкой и при холостом ходе через обмотки течет разный ток, поэтому емкость подбирается экспериментальным путем для конкретной нагрузки. Двигатель будет перегреваться, если емкость будет больше, чем нужно. Приблизительный подбор номиналов в соответствии с мощностью двигателя можно осуществить по этой таблице:
| Мощность трехфазного двигателя (кВт) | 0,4 | 0,6 | 0,8 | 1,1 | 1,5 | 2,2 |
| Минимальная емкость рабочего конденсатора (мкФ) | 40 | 60 | 80 | 100 | 150 | 230 |
| Минимальная емкость пускового конденсатора (мкФ) | 80 | 120 | 160 | 200 | 250 | 300 |
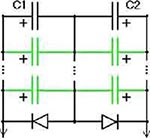
Рисунок 5. Схема подключения электролитических конденсаторов
Напряжение конденсаторов должно быть выше минимум в 1,5 раза, чтобы от скачков напряжения при включении и выключении они не вышли из строя. Из-за проблемы поиска металлобумажных конденсаторов нужной ёмкости, некоторые используют электролитические, спаянные с диодами (по особой схеме). Их нужно закрыть в корпус, во избежание попадания электролита в глаза в случае взрыва. Емкость снизится в 2 раза при соединении схемы в соответствии с рис. 5. Для работы мощных станков все-таки не желательно использовать электролитические конденсаторы.
Если хотите сделать запрос или оформить заказ: 

Подберем оптимальное решение по цене и срокам поставки.
Телефон: (044) 229 65 56
Если нужна техническая консультация: 
Поможем с расчетом нагрузок и подбором комплектующих.
Как управлять шаговым двигателем через Arduino
На производстве и в быту при автоматической работе каких-либо механизмов часто требуется точное позиционирование рабочего органа или оснастки. Для этого могут использоваться серво приводы и шаговые двигатели. Эти два вида электропривода значительно отличаются, как по конструкции, так и по особенности работы и управления. В этой статье мы затронем тему работы с шаговыми двигателями с помощью Arduino и модуля для управления электродвигателями на базе ИМС ULN2003.
Что такое шаговый двигатель?
Прежде чем перейти к статье, давайте сразу договоримся, что статья не направлена на специалистов, а её цель – донести любознательным любителям техники и технологий о таком устройстве, как шаговый двигатель и об основах работы с ними. Поэтому умников и критиков, жаждущих поговорить о великом многообразии управляемого и регулируемого электропривода, прошу идти общаться на тематические ресурсы по ЧПУ-станкам и 3D-принтерам.
Итак, для начала сформулируем определение. Согласно Википедии: «Шаговый электродвигатель — синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора».
Формулировка достаточно понятна, но её последнее предложение может вызвать некоторое недопонимание. Поэтому я предлагаю провести небольшое сравнение.
Всем известно что ротор «обычного» электродвигателя, будь то асинхронного, синхронного, коллекторного или любого другого будет вращаться до тех пор, пока на него подают напряжение питания, и после отключения питания он будет вращаться еще какое-то время по инерции, если же не используются какие-либо средства для его торможения.
Ротор такого двигателя вращается просто вокруг своей оси без каких-либо ограничений, на 360 градусов, и остановится он в любом месте. Зафиксировать его положением можно только механически (тормозом). По этой причине не получится добиться точного позиционирования исполнительных механизмов, что требуется в робототехнике, ЧПУ-станках и другом автоматизированном оборудовании.
Но шаговые двигатели разработаны для применения в механизмах, где детали поворачиваются точно на требуемый угол.
В приведенном выше определении было сказано «…вызывает дискретные угловые перемещения (шаги) ротора…» — это значит, что ротор шагового двигателя не вращается в обычном понимании, а поворачивается на какой-то определенный, «дискретный» угол. Этот угол называется шагом, отсюда и название «шаговый двигатель». Мне нравится еще одно название этих устройств — «двигатель с конечным числом положений ротора».
Питание такого двигателя невозможно без системы управления, или как его еще называют, драйвера — он подаёт импульсы в нужные обмотки, чтобы повернуть ротор на нужный угол. Это наглядно иллюстрирует приведенная ниже анимация.
Кроме того, что можно поворачивать двигатель на определенный угол и фиксировать его в этом положении, делать это всё можно без схемы обратной связи (датчиков положения и прочего).
Рассматривать типы шаговых двигателей в пределах этой статьи мы не будем, лишь кратко перечислим, какими они бывают. По конструкции:
- Реактивные.
- С постоянными магнитами.
- Гибридные.
По способу питания:
- Униполярные (однополярные — ток пропускают через обмотки только в одну сторону).
- Биполярные (ток пропускают через обмотки в обе стороны). Здесь драйвер должен подавать напряжение различной полярности, что несколько усложняет схемотехнику. При тех же размерах развивают б О льшую мощность по сравнению с униполярными.
В униполярном двигателе зачастую 5 проводов — 1 общий, от середины каждой из двух обмоток, и 4 от концов обмоток. Иногда говорят «4 обмотки» – это также правильно, поскольку фактически мы получаем 4 обмотки соединенных в общей точки.
 Униполярный шаговый двигатель
Униполярный шаговый двигатель
Также ШД могут отличаться и по количеству проводов, это зависит от того, как соединены обмотки и какое питание предполагается, некоторые варианты вы видите в таблице ниже.
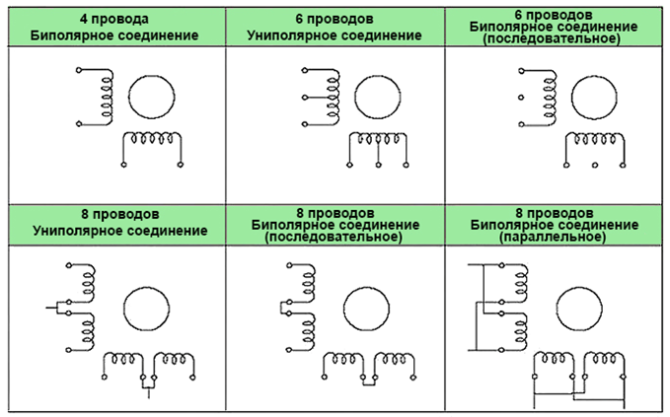 Варианты схем соединения обмоток в шаговых двигателях
Варианты схем соединения обмоток в шаговых двигателях
Управление шаговым двигателем
Различают два способа управления шаговым двигателем:
- Полношаговое. Одновременно включается только пара обмоток (без перекрытия с другими). Достигается максимальный момент на валу, но точность установления угла меньше, чем в других способах.
- Полушаговое. В этом случае увеличивается количество шагов, соответственно повышается точность установки положения вала. На каждый первый шаг включается одна обмотка, на каждый второй шагами (полушаг) – пара обмоток. Но когда включена одна обмотка момент на валу снижается вдвое.
На анимациях ниже наглядно продемонстрировано
В некоторых источниках отдельно обозначают микрошаговое управление. Используется, когда необходимо максимальное количество шагов и точность управления. По способу управления оно похоже на полушаговый режим, между шагами включаются две обмотки, а отличие в том, что токи в них распределяются не равномерно. Главный недостаток такого подхода — усложняется коммутация (система управления).
Перейдем к практике
Теория всегда запутана и непонятна, чтобы разобраться, что и как, нужно брать и делать. Поэтому перейдем к практической стороне вопроса.
Итак, из рассмотренного ранее набора у меня есть:
- Arduino UNO;
- Модуль ULN2003;
- Шаговый двигатель 28BYJ-48 5V DC;
- Куча перемычек, бредборд и источник питания для него.
Модуль ULN2003 – предназначен для управления униполярным шаговым двигателем. Схематически это транзисторная сборка Дарлингтона с 7-ю каналами и, в принципе, ею можно управлять чем угодно. Технические характеристики приведены ниже:
- Номинальный ток коллектора одного ключа — 0,5А;
- Максимальное напряжение на выходе до 50 В;
- Защитные диоды на выходах;
- Вход адаптирован к разным видам логики;
- Возможность применения для управления реле.
В модуле, кроме самой микросхемы ULN2003, есть светодиоды для индикации напряжения на выходе, колодка для подключения и перемычка для отключения питания.
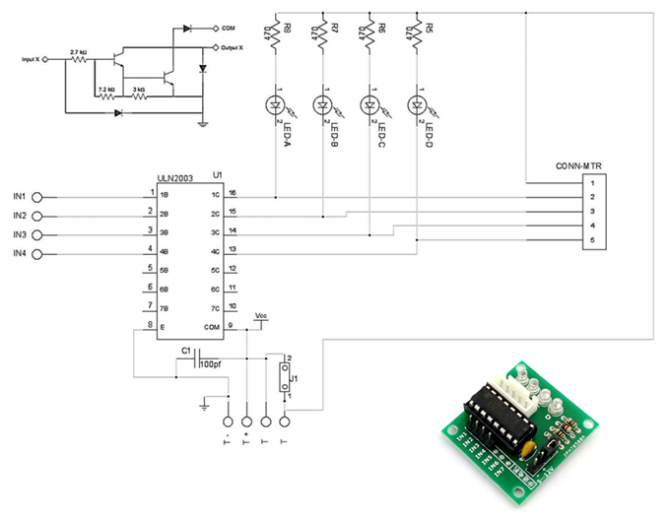 Схема модуля на ULN2003, в левом верхнем углу принципиальная схема одного канала (таких в ней 7)
Схема модуля на ULN2003, в левом верхнем углу принципиальная схема одного канала (таких в ней 7)
Двигатель 28BYJ-48 5V DC подключается штатным разъёмом к белой колодке на плате. У него 5 проводов — красный общий, и 4 от обмоток.
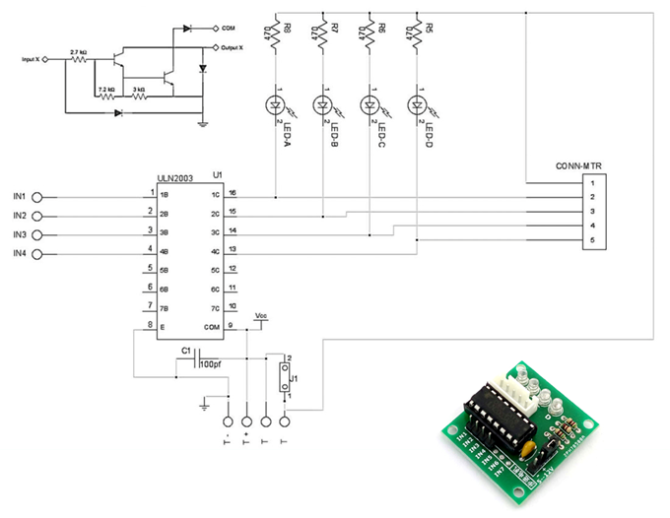 Схема фаз двигателя 28BYJ-48 5V DC
Схема фаз двигателя 28BYJ-48 5V DC
Основные характеристики:
- 32 шага за один оборот ротора;
- Встроенный редуктор с передаточным отношением 63.68395:1, благодаря этому вал делает 1 оборот за 2048 шагов, при полношаговом режиме и 4096 при полушаговом;
- Cкорость вращения: номинальная 15 об/мин, максимальная 25 об/мин;
- Напряжение питания 5 В;
- Ток одной обмотки 160 мА;
- Полный ток: в 4-шаговом режиме 320 мА, при быстром вращении 200 мА.
- Коэффициент редукции: 1/63,68395
- Угол шага ротора (без учета редуктора): при 4-ступенчатой последовательности сигналов управления 11,25 ° (32 шага на оборот); при 8-ступенчатой — 5,625 ° (64 шага на оборот)
- Крутящий момент не менее: 34,3 мНм (120 Гц);
- Тормозящий момент: 600–1200 гсм;
- Тяга: 300 гсм;
- Вес:33 г.
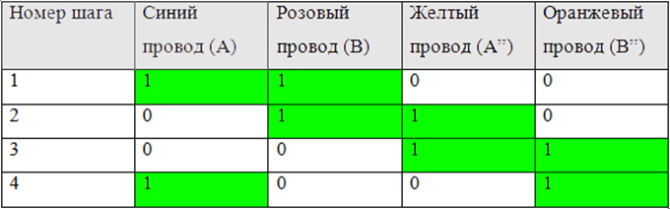
Итак, рассмотрим простейшие примеры управления двигателем без использования библиотек. Как нам известно на обмотки нужно подавать импульсы определенной последовательности.
Значит, попробуем выдать такие сигналы с ардуино. Для этого я подключаю модуль ULN2003 по такой схеме (пин ардуино – контакт модуля)
- 13 – IN1;
- 12 – IN2;
- 11 – IN3;
- 10 – IN4.
 Схема в сборе
Схема в сборе
Дальше напишем в Arudino IDE код, который будет подавать на выходы сигналы в соответствии с таблицей выше.
// назначим переменные с номерами портов
const int dl = 2; // переменная для задержки
Наборы Ардуино
Наборы электроники (Starter Kits)
Образовательные наборы Arduino – конструкторы научно-исследовательского направления для детей. Специфика наборов позволяет с малых лет изучать основы программирования, робототехники, микроконтроллеров.
Ардуино отличается от привычных электронных конструкторов, позволяя совмещать элемент игры с реальным созданием проектов. В зависимости от типа конструктора, можно создавать прототипы, изучать микросхемы, алгоритмы проектирования. Готовое устройство синхронизируется с компьютером и может пере программироваться при помощи специального софта.
Конструкторы Ардуино представлены в 3 направлениях:
- Сбор электрических схем;
- Сбор и программирование машинок;
- Сбор сложных механизмов.
Польза наборов неоспорима. С ранних лет ребенок получит техническую базу знаний, что в дальнейшем придет на помощь в школе и университете. В современном мире все меньше сфер, где не используют умные технологии и с каждым годом процесс роботизации ускоряться.
Виды стартовых наборов для Ардуино
Для первого знакомства подойдет Arduino Stater Kit. Он содержит базовые элементы, контроллер Ардуино, светодиоды, макетную плату, соединительные провода.
- Набор Arduino Uno – конструктор включает 23 детали: датчики, резисторы, кнопки, инфракрасные приемники. С помощью элементов можно собрать квадрокоптер, станок ЧПУ, «умный» дом, 3D-принтер и другое. Перед ребенком открывается бесконечный мир вариантов перестановки модулей и изучения прототипов. Процесс сборки происходит без паяльника. Предназначен для детей от 8 лет.
- Робот-конструктор Fermi – пошаговое изучение в построении управляемого робота. Готовую фигурку можно запрограммировать обходить препятствия, находить выход из лабиринта. В этом поможет пошаговая инструкция, которая включена в комплект поставки. Предназначен для детей от 8 лет.
- Робот-конструктор Otto – интерактивная фигурка из 3D пазлов, которая умеет танцевать и ходить. Кроме инженерной сборки, исследователь сможет изучить основы кодирования, ведь, чтобы оживить Отто, придется составить схематический блок команд.
- Стартовый набор Arduino «RoboStart» – помогает понять основы электроники, изучить 4 среды программирования, среди них Ardublock, Arduino IDE. Также можно создать приложение для Android и домашнего окружения (умное освещение, климатконтроль, система безопасности. Дополнительно к набору можно приобрести учебник с заданиями и ответами. Он дает безграничные возможности при проведении физических исследований.
- Робот-конструктор Ящерица, Клешня, Автомобиль – эти конструкторы Ардуино продолжают знакомить малышей с инженерией, кодированием, схемами. Большинство наборов поддерживают работу с программными оболочками Ardublock, Arduino IDE.
- Представленные наборы подходят для детей от 8-10 лет и старше.
Часто задаваемые вопросы
Для какого возраста подходят наборы Ардуино?
Оптимальный возраст знакомства с контроллером – от 6 лет. В каталоге также представлены модели для подростков от 15 лет. Многие специалисты IT не могут устоять при виде этих конструкторов.
Какие методы сборки необходимы для работы с конструктором?
В комплекте поставки представлены все необходимые элементы и инструкции. Сборка происходит без использования пайки. Все собранные фигурки можно программировать и управлять, если это предусмотрено моделью.
Где купить набор Ардуино для начинающих в Украине?
В интернет-магазине RoboStore представлен широкий ассортимент Starter Kits и других наборов электроники. Мы находимся в Киеве, но доставляем наборы во все регионы Украины.