Motor Shield
Motor Shield
 Мы не выдаем Китай за Италию. Платы от российского производителя по сниженным ценам.
Мы не выдаем Китай за Италию. Платы от российского производителя по сниженным ценам.
Описание Motor Shield
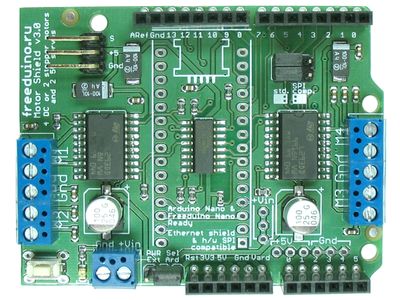
Motor Shield (далее M–Shield) – силовой модуль управления двигателями для микроконтроллеров серии Freeduino/Arduino. Модуль предназначен для упрощения разработки моторизированных и робототехнических устройств и основан на первой версии M–Shield от Adafruit Industries (www.ladyada.net).
Модуль существует в двух версиях: v2 со штыревыми компонентами, и пришедшая ей на замену v3 с поверхностным монтажом компонентов и дополнительным функционалом.
Модуль подключается к Freeduino с помощью установленных на нем разъемов.
Обновленная версия M-Shield v3:

Предыдущая версия с штыревым монтажом M-Shield v2:
Модуль также доступен в виде набора для сборки (Kit). 


Технические возможности M–Shield позволяют реализовать разнообразные проекты, связанные с подключением и управлением слаботочными двигателями следующих типов:
- четырёх двигателей постоянного тока (ДПТ — DC motors);
- двух шаговых двигателей униполярных или биполярных с одинарной или двойной обмоткой (ШД — stepper motors);
- двух 5В сервоприводов (СП — servos).

Возможны следующие комбинации подключаемых к M–shield двигателей:
- 2 СП + 4 ДПТ;
- 2 СП + 2 ШД;
- 2 СП + комбинации ШД и ДПТ, например: возможен вариант замены 1 ШД на 2 ДПТ или наоборот.
Обновленная версия v3 может быть переключена в режим, совместимый с аппаратным SPI (а значит и с модулями типа Ethernet Shield), в котором не используются выводы 10, 11, 12, 13. Также, для v3 возможно простое подключение к базовой плате в формате Nano.
- напряжение питания: +7. + 24 В;
- количество силовых каналов: 4;
- максимально-продолжительный ток каждого канала: 0,6 А;
- напряжение питания сервоприводов: 5 В;
- возможность реверса каждого двигателя;
- возможность независимого управления каждым каналом;
- модуль полностью совместим со всеми известными моделями Freeduino/Arduino: MaxSerial, Through-Hole, Diecimila, 2009, Duemilanove, а также Arduino Mega. Версия v3 может удобно стыковаться с Freeduino/Arduino Nano.
Драйвер двигателей L293D
Управление двигателями осуществляется двумя микросхемами L293D. Каждая микросхема – это четырёхканальный драйвер со встроенными обратными диодами для защиты микросхемы от перенапряжений при работе на индуктивную нагрузку.
Драйверы управляются парами, что позволяет реализовать на одной микросхеме два двуполярных канала управления с ШИМ управлением.
Основные характеристики микросхемы:
- напряжение питания: +4,5. +36 В;
- максимальный продолжительный ток в каждом канале: 0,6 А;
- максимальный пиковый (


В настоящей версии M–Shield верхнее значение напряжения питания ограничено используемыми электролитическими конденсаторами на максимальное напряжение 25 В и может быть увеличено до максимального для микросхемы L293D значения 36 В заменой конденсаторов С7 и С8.
Особенности версии v3
Обновленная версия v3 модуля M-Shield в основном подобна предыдущей версии v2, но выполнена с применением поверхностного монтажа.
Первое важное отличие – возможность работы в режиме совместимости с аппаратным SPI. Оригинальный модуль от Adafruit Industries, как и версия M-Shield v2, в числе прочих задействует вывод 12 для управления микросхемой 74HCT595 и вывод 11 для ШИМ, и поэтому несовместимы с аппаратным SPI, и в частности с Ethernet Shield.
В версии v3 можно с помощью перемычек вместо вывода 12 использовать вывод 2, а вместо вывода 11 – вывод 9.

В таком режиме возможно совместное использование модуля M-Shield и Ethernet Shield, но нужно отметить, что выведенные на модуле штыревые разъемы для сервоприводов уже недоступны, т.к. один из них находится на занятом выводе 9, а второй на используемом SPI выводе 10.
Данный модифицированный режим работы требует изменений в управляющей библиотеке. Нами модифицирована библиотека AFMotor-08_12_2009, но ее работа протестирована только в режимах управления двигателями постоянного тока:
Второе отличие версии v3 – возможность стыковки не только с полноразмерной Arduino платой, но и с платами в формате Nano. В законченных решениях можно даже впаять плату Freeduino Nano вместо гнезд, и получить очень компактное устройство. Важно только не перепутать ориентацию платы.


Важно отметить, что модуль не может использоваться как полноценный переходник с формата Nano на полноразмерный формат Arduino, т.к. между разъемами Nano и Arduino разведены только используемые M-Shield выводы.
В последней модификации модуля применены «проходные» разъемы, позволяющие состыковывать M-Shield v3 и другие модули без сдвига относительно платы Arduino.
В комплект поставки входит M-Shield v3, разъемы Arduino Nano и разъемы «классической» Arduino. При заказе монтажа соответствующие разъемы монтируются. Если монтаж разъемов не заказывать, то при необходимости их можно будет смонтировать самостоятельно.
Существует удобная библиотека, упрощающая работу с модулем M-Shield, скачать которую можно с сайта разработчика, или у нас:
Для работы в SPI-совместимом режиме необходима модифицированная библиотека:
Как и в большинстве случаев, установка библиотеки сводится к распаковке архива в подпапку hardwarelibraries папки с ПО Arduino.
Управление двигателями постоянного тока
Для управления двигателями постоянного тока используется класс AF_DCMotor. Ниже рассмотрены его основные методы и приведены примеры работы.
Определение параметров двигателя
Убедитесь, что параметры двигателя – номинальное напряжение и ток соответствуют используемому источнику питания и параметрам M-Shield.
Если потребляемый двигателем ток превышает номинальное для драйвера L293D значение в 0,6 А, можно увеличить значение продолжительного тока до 1,2 А путем параллельного подключения двигателя одновременно к двум портам, например к М1 и М2 и составлением соответствующего алгоритма управления.
Кроме того, с целью увеличения допустимой токовой нагрузки в два раза, можно напаять на микросхему L293D «нога к ноге» ещё одну L293D, это позволит управлять более мощными двигателями с максимально-продолжительным током в каждом канале управления до 1,2 А.
Вы также можете использовать две платы M-Shield, установив одну в разъемы другой, и подключив каждый двигатель к одноименным каналам обеих плат.
Подключение двигателей постоянного тока
Расположенные на плате M-Shield 5-контактные клеммники предназначены для подключения двигателей. Центральный контакт каждого клеммника – «земля», двигатели постоянного тока подключаются к крайним парам контактов, обозначенных по номерам каналов M1, M2, M3, M4.
AF_DCMotor – конструктор объекта
Создает экземпляр класса AF_DCMotor, принимает номер канала После создания объекта можно вызывать его методы.
Задает скважность ШИМ на канале в диапазоне от 0 до 255. Значение 0 соответствует напряжению 0 В на двигателе, значение 255 – полному напряжению питания.
Задает направление движения двигателя (полярность прикладываемого напряжения). Параметр «направление» может принимать одно из следующих значений:
FORWARD – прямое направление вращения
BACKWARD – обратное направление вращения
RELEASE – остановка двигателя
Пример управления двигателями постоянного тока
Ниже приведен пример простой программы, осуществляющей ступенчатое изменение скорости вращения двигателя с интервалами в 3 секунды в следующей последовательности: +50, +75%, +50%, STOP, -50%, -75%, -50%, STOP. После завершения цикл будет повторяться.
//Создаем объект для двигателя на 1 канале (M1)
AF_DCMotor motor ( 1 ) ;
void loop ( ) <
//Задаем направление движение вперед
motor. run ( FORWARD ) ;
//Устанавливаем скорость 50%
motor. setSpeed ( 128 ) ;
//пауза 3 секунды — двигатель крутится
delay ( 3000 ) ;
//увеличиваем скорость до 75%, и пауза 3 сек.
motor. setSpeed ( 192 ) ;
delay ( 3000 ) ;
//Снижаем скорость до 50%, и пауза 3 сек.
motor. setSpeed ( 128 ) ;
delay ( 3000 ) ;
//Останавливаем двигатель, и пауза 3 сек.
motor. run ( RELEASE ) ;
delay ( 3000 ) ;
//Переключаем направление вращения
//Двигатель начнет вращаться со скоростью 50%
motor. run ( BACKWARD ) ;
//пауза 3 секунды — двигатель крутится
delay ( 3000 ) ;
//увеличиваем скорость до 75%, и пауза 3 сек.
motor. setSpeed ( 192 ) ;
delay ( 3000 ) ;
//Снижаем скорость до 50%, и пауза 3 сек.
motor. setSpeed ( 128 ) ;
delay ( 3000 ) ;
//Останавливаем двигатель, и пауза 3 сек.
motor. run ( RELEASE ) ;
delay ( 3000 ) ;
>
Управление шаговыми двигателями
Благодаря тому, что вращение ротора осуществляется фиксированными шагами, без необходимости обратной связи по положению, шаговые двигатели часто применяются в различных устройствах и механизмах.
Подключение шаговых двигателей
M-Shield поддерживает одновременное подключение двух шаговых двигателей. Управление шаговыми двигателями осуществляется с помощью той же библиотеки AFMotor, что и для работы с двигателями постоянного тока.
Для подключения однополярного шагового двигателя к M-shield необходимо определиться, какой из выводов двигателя подключен к его соответствующей обмотке. Если у двигателя пять выводов, то один из них является средней точкой двух его обмоток, которая подключается к электрической цепи GND модуля. Остальные выводы это начало, и конец обмоток, которые подключаются к портам M-shield: M1 и M2 или к M3 и M4.
Подключение двуполярного шагового двигателя к M-Shield производится аналогично однополярному за исключением того, что у него отсутствует вывод средней точки обмоток двигателя.
AF_Stepper – конструктор объекта
AF_Stepper имя_объекта(число шагов, канал);
Создает экземпляр класса AF_Stepper, принимает число шагов на один оборот двигателя и номер канала. При подключении двигателя к портам M1 и M2 указывайте 1 в качестве номера канала, при подключении к портам M3 и M4 указывайте 2.
Метод AF_Stepper::setSpeed – задание скорости
Задает частоту вращения ротора в оборотах в минуту. При указании частоты вращения больше рекомендованной для используемого двигателя с учетом напряжения питания и момента сопротивления на валу, возможно пропускание двигателем шагов.
Метод AF_DCMotor::step – вращение на нужное число шагов
имя_объекта.step(число шагов, направление, тип шага)
число шагов – требуемое число шагов;
направление – либо FORWARD (вперед), либо BACKWARD (назад);
тип шага – один из 4 вариантов: SINGLE, DOUBLE. INTERLEAVE или MICROSTEP.
SINGLE – активация одной обмотки двигателя для совершения шага;
DOUBLE – активация двух обмоток двигателя, что обеспечивает больший вращающий момент;
INTERLEAVE – чередование между SINGLE и DOUBLE режимом, с двойной точностью и половинной скоростью вращения.
MICROSTEP – применение ШИМ для управления шаговым двигателем двигателем.
Задает направление движения двигателя (полярность прикладываемого напряжения). Параметр «направление» может принимать одно из следующих значений:
FORWARD – прямое направление вращения
BACKWARD – обратное направление вращения
RELEASE – остановка двигателя
Метод AF_Stepper::release – отключение двигателя
По умолчанию шаговый двигатель удерживает свое положение после завершения шага, однако вызов release() отключает обмотки двигателя для осуществления свободного вращения ротора.
Пример управления шаговым двигателем
Ниже приведен пример простой программы, осуществляющей управление шаговым двигателем ST28, подключенным к портам M3 и M4 модуля.

У шагового двигателя ST28 32 шага на оборот, а также встроенный редуктор с передаточным числом 64, что дает 32*64=2048 шагов двигателя на один оборот выходного вала. В приведенном примере осуществляется поворот на один оборот в прямом направлении в режиме SINGLE, на один оборот в обратном в режиме DOUBLE, на пол-оборота в прямом направлении в режиме INTERLEAVE, и на пол-оборота в обратном в режиме MICROSTEP.
//Создаем объект для двигателя на 2 канале (M3 и M4)
AF_Stepper motor ( 2048 , 2 ) ;
void setup ( ) <
motor. setSpeed ( 10 ) ; // 10 оборотов в минуту
>
void loop ( ) <
motor. step ( 2048 , FORWARD, SINGLE ) ; //1 оборот
motor. step ( 2048 , BACKWARD, DOUBLE ) ; //1 оборот
//в режиме INTERLEAVE скорость в 2 раза ниже, а шаги в
//2 раза меньше. То же число полушагов даст 0.5 оборота
motor. step ( 2048 , FORWARD, INTERLEAVE ) ; //0.5 оборота
motor. step ( 1024 , BACKWARD, MICROSTEP ) ; //0.5 оборота
motor. release ( ) ;
delay ( 1000 ) ;
>
. to be continued. Планируется расширение документации примерами работы с сервоприводами
2 Схемы
Принципиальные электросхемы, подключение устройств и распиновка разъёмов

Motor Shield: плата расширения к Ардуино

Модуль RA022 Motor Shield — обзор платы и её принципиальная схема. Данная плата расширения служит для подключения к плате Arduino UNO относительно мощных исполнительных устройств: элекромоторов постоянного тока, шаговых двигателей и сервомоторов.
Плата Мотор Шилд стоит около 100-200 рублей и поставляется в антистатическом пакете.

Устройство имеет размер 69 х 53 х 20 мм, 30,6 г.

Стандартное расположение выводов позволяет легко подключить плату расширения к Arduino UNO, Arduino Leonardo или Arduino Mega.


На плате располагаются клеммные колодки для подключения четырех электромоторов или двух шаговых двигателей. Максимальный допустимый ток составляет 600 мА на канал [1-3].


Для взаимодействия с Arduino данный модуль использует порты D3-D8 и D11-D12 [2,4]. Порты D9-D10 выведены на плату шилда в виде трехконтактных разъемов для подключения сервоприводов.

Также на плате имеется кнопка перезагрузки Arduino.

Плата Arduino UNO как источник питания сравнительно маломощна, поэтому для надежно работы электродвигателей необходим отдельный источник питания. Для его подключения на плате шилда имеется отдельная клеммная колодка.

Напряжение питания шилда должно лежать в диапазоне от 4,5 до 25 В [4] . Для выбора источника питания на плате имеется перемычка. Если перемычка надета, то питание двигателей осуществляется от платы Arduino.

В этом режиме питание пары электродвигателей [5] оказывается невозможным. На фотографиях хорошо видно, что при установленной перемычке напряжение на USB порту падает до 4 В, электродвигатели при этом не работают.

При отключенной перемычке ток потребляемый через USB порт связкой из Arduino UNO и мотор шилда составляет 140 мА.

Для обеспечения работы электродвигателей был использован отдельный источник электропитания, напряжением 6В. На фотографиях видно, что при этом ток, потребляемый через USB порт, упал до 50 мА. От внешнего источника питания забирается ток около 0,25 А.


Для упрощения работы с данной платой расширения целесообразно использовать специальную библиотеку AFMotor [6]. Следует отметить, что версии библиотеки друг от друга отличаются, у автора устройство заработало с библиотекой, скачанной вот отсюда [7]. Для проверки работоспособности была использована программа _2_motor [2].
Принципиальные схемы
Выводы о модуле
В целом данная плата расширения оставляет достаточно приятное впечатление, за сравнительно небольшую цену (около 110 р. на апрель 2018 г.) мы получаем возможность управлять четырьмя электродвигателями. Разумеется, все то, что делает данный шилд можно реализовать самостоятельно, однако это займет несравнимо больше времени, чем установка и настройка этой платы расширения. Наличие готовых библиотек сильно упрощает программирование.

Из недостатков можно отметить отсутствие разъемов для работы с незанятыми портами Arduino. Впрочем, радом с контактами аналоговых портов на плате предусмотрены металлизированные отверстия, что позволит при необходимости не только подвести к ним провода, но и собрать на свободной площади платы несложную схему (например, делитель напряжения).
Ссылки
- http://www.zi-zi.ru/module/module-l293
- http://роботехника18.рф/подключение-мотор-шилд-к-ардуино/
- https://arduino-kit.ru/catalog/id/modul-ra022.-motor-shield-na-baze-mikroshem-l293d
- http://robotosha.ru/arduino/motor-shield.html
- http://radioskot.ru/publ/raznoe/shassi_dlja_kolesnogo_robota/18-1-0-1122
- http://iarduino.ru/file/161.html
- http://arduino-diy.com/arduino-motor-shield
Все файлы находятся в общем архиве. Обзор подготовил для сайта 2 Схемы — Denev.
Драйвер биполярного шагового двигателя на Attiny261
Этот драйвер 4-х проводного биполярного шагового двигателя может найти множество применений при проектировании систем автоматизации или игрушек. Несмотря на простоту конструкции, система характеризуется рядом полезных функциональных особенностей.
Принципиальная схема драйвера биполярного шагового двигателя показана на следующем рисунке.

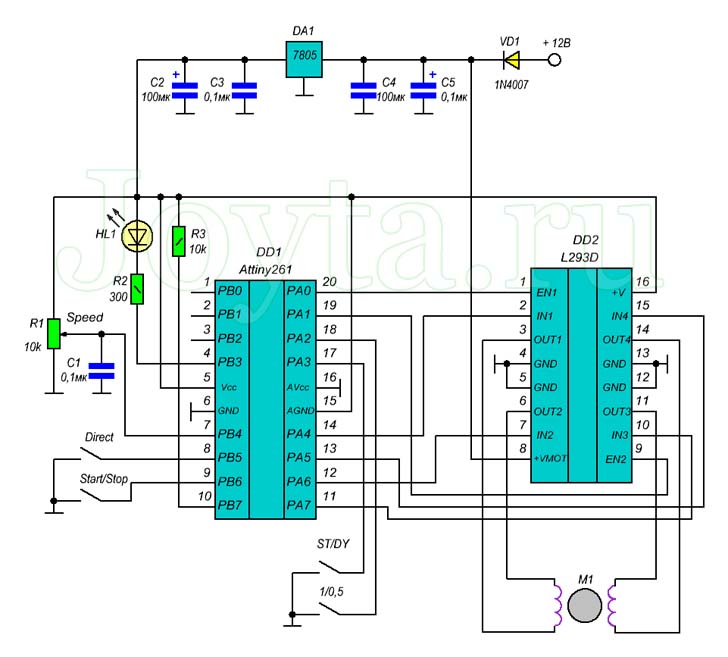
Драйвер запитан от источника постоянного напряжения 12В. Диод VD1 (1N4007) защищает схему от ошибочного подключения полярности входного напряжения, а конденсаторы С2…С5 выполняют роль фильтра питания.
Входное напряжение подается на стабилизатор напряжения DA1 (78L05), который обеспечивает необходимое напряжение +5 В для работы микроконтроллера.
Работой драйвера шагового двигателя управляет микроконтроллер DD1 (ATtiny261), работающий от внутреннего тактового генератора.
Непосредственное силовое управление шаговым двигателем осуществляется микросхемой DD2 (L293D), представляющая собой сборку из двух H-мостов.
Потенциометр R1 используется для регулировки скорости вращения. Светодиод HL1 показывает состояние работы устройства.
Переключатели Direct и Start/Stop используются для управления выбором направления вращения и торможением двигателя, соответственно.
Перемычки 1/0,5 и ST/DY используются для настройки режима работы драйвера. Перемычка 1/0,5 используется для выбора режима работы двигателя. Если перемычки нет — пошаговая работа, перемычка установлена - полшага.

Пошаговая работа является самым простым способом управления шаговым двигателем, а полушаговая работа заключается в добавлении промежуточных состояний в управлении. На практике это приводит к плавной работе двигателя, но увеличивает потребление тока примерно на 50-60%.
Перемычка ST/DY предназначена для выбора способа торможения двигателя. Нет перемычки — статическое торможение, перемычка установлена – динамическое торможения.
При торможении шагового двигателя в динамическом режиме торможение осуществляется за счет подачи напряжения на соответствующую катушку. На практике это приводит к блокировке оси двигателя в одной точке, но вызывает значительное потребление тока и нагрев обмоток.
Торможение в статическом режиме осуществляется путем отключение питания двигателя. При этом происходит минимальное потребление тока (состояние покоя), но при этом ось двигателя может свободно провернуть.
Все изменения в конфигурации контроллера, сделанные с помощью перемычек 1/0,5 и ST/DY, будут активны только после сброса напряжения питания.
Схема в Proteus:

 Скачать прошивку и модель в Proteus (16,3 KiB, скачано: 669)
Скачать прошивку и модель в Proteus (16,3 KiB, скачано: 669)
Драйвер шагового двигателя TB6560 V2
TB6560 V2 — драйвер управления двухфазными шаговыми двигателями выполнен на специализированном чипе Toshiba TB6560AHQ с питанием 10В – 35В постоянного напряжения, предназначен для использования с двигателями типа NEMA17 – NEMA23 с максимальным током фазы до 3А. Широко используется в ЧПУ системах.
· Напряжение питания 10В – 35В постоянного напряжения;
· Оптоизолированные входы сигналов управления;
· Делитель шага (микрошаг) – 1,2,8,16;
· Установка максимального тока – 14 ступеней.
 |  |
 |  |
Основные характеристики:
10-35В постоянного напряжения
0.3A~3A (в пике 3.5А макс.)
Не допускать конденсат и капли воды
Не допускать проводящих газов и защищать от пыли
Описание:
Разьемы
Маркировка
Описание
Положительный и отрицательный выводы входа тактового сигнала
Положительный и отрицательный выводы входа управления направлением вращения
Положительный и отрицательный выводы входа разрешения работы
Положительный и отрицательный выводы подключения питания
Выводы подключения I фазной обмотки двигателя
Выводы подключения II фазной обмотки двигателя
Назначение выводов TB6560.
| Номер вывода | Вход /выход | Обозначение | Назначение | |
| TB6560AHQ | TB6560AFG | |||
| 1 | 42 | вход | TQ2 | Входы установки крутящего момента (рабочего тока) |
| 2 | 43 | вход | TQ1 | |
| 3 | 45 | вход | CLK | Тактовый вход (STEP) . Импульс инициирует один шаг. |
| 4 | 47 | Вход | ENABLE | Высокий уровень разрешает работу драйвера. Низкий уровень – отключает все выходы. |
| 5 | 48 | Вход | RESET | Низкий уровень вызывает сброс. |
| 6 | 50, 51 | — | SGND | Сигнальная земля. |
| 7 | 53 | — | OSC | Вход подключения конденсатора RC генератора, задающего частоту дискретизации выходов. |
| 8 | 55, 56 | Вход | Vmb | Напряжение питания двигателя (фаза B) |
| 9 | 61, 62 | выход | OUT_BM | Выход фазы B (отрицательный) |
| 10 | 64 | — | PGNDB | Силовая земля |
| 11 | 2, 4 | — | Nfb | Токовый выход фазы B для датчика тока (резистора). |
| 12 | 6, 7 | выход | OUT_BP | Выход фазы B (положительный) |
| 13 | 10, 11 | выход | OUT_AM | Выход фазы A (отрицательный) |
| 14 | 13, 14 | — | Nfa | Токовый выход фазы A для датчика тока (резистора). |
| 15 | 16 | — | PGNDA | Силовая земля |
| 16 | 19, 20 | выход | OUT_AP | Выход фазы A (положительный) |
| 17 | 23 | выход | Mo | Выход индикации начального состояния диаграммы. Открытый коллектор, в начальном состоянии замкнут. |
| 18 | 25, 26 | Вход | Vma | Напряжение питания двигателя (фаза A) |
| 19 | 28 | выход | Protect | Выход индикации срабатывания защиты по перегреву. Открытый коллектор, при перегреве замкнут. |
| 20 | 30, 31 | Вход | Vdd | Питание управляющей части. |
| 21 | 33 | Вход | CW/CCW | Выбор направления вращения (DIR). Низкий уровень прямое, высокий – реверсивное. |
| 22 | 35 | Вход | M2 | Выбор режима (шаг, полушаг, микрошаг). |
| 23 | 36 | Вход | M1 | |
| 24 | 38 | Вход | DCY2 | Выбор режима спада тока обмоток. |
| 25 | 39 | вход | DCY1 | |
Схемы подключения
Управляющие входы можно подключить к портам контроллера двумя способами. Зависит от конфигурации и исполнения портов контроллера (Рис.1, Рис.2).

Пример подключения драйвера при исполнении порта контроллера на NPN ключах с открытым коллектором.

Пример подключения драйвера при исполнении порта контроллера на PNP ключах с открытым коллектором.
Значение сопротивлений R_CLK, R_CW и R_EN зависят от питающего напряжения VCC:
· При VCC=5В, R_CLK = R_CW = R_EN = 0;
· При VCC=12В, R_CW = R_EN = 1кОм, R_CLK = 1.5кОм;
· При VCC=24В, R_CW = R_EN = 2кОм, R_CLK = 3кОм.
 |
| Принципиальная схема драйвера шагового двигателя TB6560-V2. |
Оптоизоляция входных сигналов выполнена на оптопарах 4Т35, 6N137 и PC817. Для сигнала STEP используется быстродействующий оптрон 6N137. Частота сигнала STEP может достигать 15 кГц. Остальные сигналы такого быстродействия не требуют.
Блок установки номинального тока подключает параллельно до трех резисторов, тем самым задавая разное сопротивление датчиков токов фаз (резисторы NF).
Единственная функция модуля TB6560-V2, которой нет в микросхеме TB6560 – это снижение тока при остановке двигателя. Очень удобная функция. Когда двигатель останавливается, нет необходимости держать на его обмотках полный рабочий ток. Выключать драйвер нельзя, так как ротор может повернуться от механического воздействия или притянуться к ближайшей фазе при микро шаговом режиме. Т.е. ток в фазах надо оставить, только снизить до уровня удерживающего тока.
Блок определения остановки двигателя реализован на одновибраторе 74HC123 (74HC23.pdf). Сигнал STEP перезапускает одновибратор по каждому отрицательному фронту. Когда импульсы сигнала STEP прекращаются, т.е. двигатель останавливается, одновибратор заканчивает отрабатывать последний выходной импульс и переходит в состояние высокого уровня (вывод 4). Время импульса одновибратора задано элементами R1, C1 и составляет 45 мс. Таким образом, если импульсы сигнала STEP следуют с периодом не реже приблизительно 50 мс, то вывод 4 одновибратора 74HC123 находится в низком состоянии, и рабочий ток определяется переключателем S1. Когда импульсы сигнала STEP прекращаются, вывод 4 переходит в высокий уровень и устанавливает на входах TQ1 и TQ2 микросхемы TB6560 режим пониженного тока.
В схеме драйвера удивляет отсутствие защитных диодов. Если покрутить двигатель в выключенном состоянии драйвера, то он будет работать как генератор и микросхема может выйти из строя. Для защиты выходных ключей драйвера обычно используется простая схема из диодных ограничителей. На каждый из четырех выходов микросхемы TB6560 необходимо подключить по два диода: к земле и напряжению питания (сигнал 24 V). С учетом того, что в драйвере используется ШИМ выходных сигналов, диоды должны быть высокочастотными.
Схема подключения к контроллеру
3. Настройка DIP переключателей
Микрошаг — режим управления шаговым двигателем, под которым понимают режим деления шага. Микрошаговый режим отличается от простого режима полношагового управления двигателем тем, что в каждый момент времени обмотки шагового мотора запитаны не полным током, а некими его уровнями, изменяющимися по закону SIN в одной фазе и COS во второй. Такой принцип позволяет фиксировать вал в промежуточных положениях между целыми шагами. Количество таких положений задается настройками драйвера. Скажем, режим микрошага 1:16 означает, что с каждым поданным импульсом STEP драйвер будет перемещать вал примерно на 1/16 полного шага, и для полного оборота вала потребуется подать в 16 раз больше импульсов, чем для режима полного шага.
 |
Делитель шага (микрошаг) устанавливают переключателями S3, S4 в соответствии с таблицей: