Шаговый двигатель динамические характеристики
Шаговый двигатель динамические характеристики
Шаговые синхронные двигатели. Принцип действия и основные характеристики
 Шаговые двигатели (ШД) служат для преобразования импульсного или кодового сигнала в угловое перемещение. В последнее время в связи с развитием компьютерной техники и технологии их область применения постоянно расширяется.
Шаговые двигатели (ШД) служат для преобразования импульсного или кодового сигнала в угловое перемещение. В последнее время в связи с развитием компьютерной техники и технологии их область применения постоянно расширяется.
Шаговые двигатели являются синхронными электрическим машинами, у которых обмотки статора питаются от источника постоянного тока. Как и обычные двигатели они бывают активными (с возбужденным ротором) и реактивными. Активный ротор позволяет получить больший вращающий момент и обеспечить фиксацию положения при обесточенных обмотках статора.
На статоре ШД располагаются несколько обмоток, подключаемых в определенной последовательности к источнику постоянного тока с помощью электронного коммутатора. На рис. 1 схематически изображен шаговый реактивный двигатель с тремя обмотками на статоре. На временной диаграмме показаны токи в обмотках. На первом участке ток подается в обмотку 1. Она формирует неподвижное магнитное поле, ось полюсов которого совпадает с геометрической осью обмотки. Ротор разворачивается и ориентируется по оси магнитного поля. Затем к источнику питания подключается обмотка 2. Обе обмотки создают магнитное поле с осью полюсов, проходящей между осями обмоток и ротор поворачивается на . На следующем интервале обмотка 1 отключается и остается включенной обмотка 2. При этом ротор поворачивается еще на , ориентируясь вдоль ее оси. Далее подключается обмотка 3 и алгоритм циклически повторяется, вызывая дискретное перемещение ротора. Коммутацию обмоток в любой момент можно остановить и ротор останется в положении, соответствующем состоянию включенных обмоток.
Угловое смещение ротора при каждой коммутации называется шагом.
 В каждом статическом состоянии между коммутациями ШД работает как обычный синхронный двигатель и имеет угловую характеристику (УХ), соответствующую его типу (активный или реактивный). На рис. 2 а) показаны УХ, соответствующие трём соседним шагам двигателя. Начало координат совмещено с УХ mpqn , соответствующей протеканию тока в некоторой произвольно выбранной обмотке (или комбинации обмоток). Включение обмотки, соответствующей требуемому смещению ротора на один шаг вперёд (+) или назад (–), эквивалентно скачкообразному смещению УХ в положительном или отрицательном направлении или, что то же самое, скачкообразному увеличению или уменьшению угла нагрузки q на величину шага. При этом скачкообразно изменяется и вращающий момент, развиваемый ШД. Однако для движения в положительном направлении вращающий момент после коммутации обмоток M (0+) должен быть больше момента до коммутации M (0–), а для движении в отрицательном направлении – меньше, т.е. M (0+) M (0–). Участки послекоммутационных УХ, соответствующие эти условиям, выделены на рис. 2 а) толстыми линями. Из рисунка следует, что для обеспечения движения в обоих направлениях рабочая точка должна находиться на участке pq исходной УХ, ограниченном точками ее пересечения с послекоммутационными УХ, т.е. угол нагрузки q должен находиться в пределах
В каждом статическом состоянии между коммутациями ШД работает как обычный синхронный двигатель и имеет угловую характеристику (УХ), соответствующую его типу (активный или реактивный). На рис. 2 а) показаны УХ, соответствующие трём соседним шагам двигателя. Начало координат совмещено с УХ mpqn , соответствующей протеканию тока в некоторой произвольно выбранной обмотке (или комбинации обмоток). Включение обмотки, соответствующей требуемому смещению ротора на один шаг вперёд (+) или назад (–), эквивалентно скачкообразному смещению УХ в положительном или отрицательном направлении или, что то же самое, скачкообразному увеличению или уменьшению угла нагрузки q на величину шага. При этом скачкообразно изменяется и вращающий момент, развиваемый ШД. Однако для движения в положительном направлении вращающий момент после коммутации обмоток M (0+) должен быть больше момента до коммутации M (0–), а для движении в отрицательном направлении – меньше, т.е. M (0+) M (0–). Участки послекоммутационных УХ, соответствующие эти условиям, выделены на рис. 2 а) толстыми линями. Из рисунка следует, что для обеспечения движения в обоих направлениях рабочая точка должна находиться на участке pq исходной УХ, ограниченном точками ее пересечения с послекоммутационными УХ, т.е. угол нагрузки q должен находиться в пределах  . Это эквивалентно условию
. Это эквивалентно условию
 (1)
(1)
где: M н – нагрузочный момент на валу ШД; M max – максимальный момент, развиваемый ШД; a – шаг двигателя в электрических угловых единицах измерения, связанный с пространственным шагом ротора отношением  ; z p – число пар полюсов ШД.
; z p – число пар полюсов ШД.
На рис. 2 б) показаны варианты отработки шага в положительном и отрицательном направлениях при выполнении условия (1). Статический режим в исходном положении соответствует точке a . При отработке положительного шага в момент коммутации происходит переход в точку b +, а затем, по мере поворота ротора, в точку c +, соответствующую новому статическому состоянию. Шаг в отрицательном направлении из точки a происходит после коммутационного скачка в точку b – и последующего перемещения в точку c –. В случае нарушения условия (1), например, при отработке шага в положительном направлении, исходная рабочая точка a располагается выше точки q (рис. 2 в). При коммутации происходит переход в точку b + с меньшим, чем у нагрузки вращающим моментом. Поэтому, в соответствии с уравнением движения (  ), ротор ШД начнёт вращаться с отрицательным ускорением e пока не достигнет точки равновесия с ’, смещенной по отношению к точке на угол 2 p – a . В случае
), ротор ШД начнёт вращаться с отрицательным ускорением e пока не достигнет точки равновесия с ’, смещенной по отношению к точке на угол 2 p – a . В случае  ротор после коммутации окажется в положении неустойчивого равновесия в точке q и может случайным образом переместиться на один шаг в положительном направлении или на угол 2 p – a в отрицательном. Таким образом, нарушение условия (1) приводит к полной потере работоспособности ШД.
ротор после коммутации окажется в положении неустойчивого равновесия в точке q и может случайным образом переместиться на один шаг в положительном направлении или на угол 2 p – a в отрицательном. Таким образом, нарушение условия (1) приводит к полной потере работоспособности ШД.
Из выражения (1) следует, что располагаемый вращающий момент ШД всегда меньше максимально возможного и стремится к нему при  . На рис. 2 г) показана зависимость располагаемого момента от числа шагов n на периоде коммутации. Работа ШД с числом шагов менее трёх вообще невозможна. При трёх шагах на периоде момент вдвое меньше максимального, а при десяти отличается от него менее чем на 10%.
. На рис. 2 г) показана зависимость располагаемого момента от числа шагов n на периоде коммутации. Работа ШД с числом шагов менее трёх вообще невозможна. При трёх шагах на периоде момент вдвое меньше максимального, а при десяти отличается от него менее чем на 10%.
Коммутацию обмоток ШД можно производить в разных режимах. Различают следующие режимы работы двигателей.
Статический режим, когда в обмотках статора протекает постоянный ток и магнитное поле неподвижно. Ротор находится в фиксированном положении и может только отклоняться от него на угол нагрузки q .
Квазистатический режим — режим когда коммутация обмоток совершается непрерывно, но между моментами переключения электромагнитные и механические переходные процессы полностью заканчиваются и скорость ротора в начале каждого шага равна нулю. Этот режим по существу является последовательностью статических режимов.
Установившийся режим работы, это режим при постоянной частоте коммутации обмоток. Ротор двигателя в этом режиме имеет постоянную среднюю скорость вращения, но совершает периодические и непериодические угловые колебания. Мерой длительности переходных процессов в ШД является период или частота собственных колебаний ротора , т.е. частота свободных угловых колебаний, которые будет совершать ротор, возвращаясь в состояние равновесия под действие магнитного поля статора. На практике частоту коммутации выбирают из условия . Наименьшую динамическую ошибку обеспечивает режим работы при двойной частоте коммутации . Эту частоту можно считать оптимальной для слабонагруженных приводов.
Помимо частоты собственных колебаний, для работы двигателей большое значение имеет электромагнитная постоянная времени обмоток статора , где — постоянная составляющая индуктивности обмотки статора, — полное активное сопротивление цепи обмотки. Электромагнитные процессы в двигателе можно не учитывать, если
Кроме указанных режимов работы существуют переходные режимы — пуск, ускорение, замедление, реверс. В этих режимах также недопустима потеря шагов.
Пуск ШД обычно осуществляется из фиксированного неподвижного состояния путем скачкообразного увеличения частоты коммутации. Пусковые свойства двигателей характеризуются частотой приёмистости, т.е. максимальной частотой коммутации, при которой возможен пуск без выпадения из синхронизма (без потери шагов). Частота приёмистости возрастает с увеличением максимального момента, уменьшением шага, снижением постоянной времени обмоток, величины нагрузки и момента инерции, приведённого к валу ротора.
Торможение ротора осуществляется скачкообразным прекращением коммутации. Предельная частота торможения, при которой ротор останавливается без потери шагов, как правило, выше частоты приёмистости.
Реверс осуществляется скачкообразным изменением алгоритма коммутации. Предельная частота реверса всегда меньше частоты приёмистости.
 Основными характеристиками, определяющими свойства ШД как электромеханического преобразователя, являются рабочие динамические характеристики. К ним относятся предельная механическая характеристика и зависимость частоты приёмистости от момента нагрузки. Предельная механическая характеристика – это зависимость тактовой частоты коммутации или, что то же самое, средней скорости вращения ротора, от момента нагрузки на валу, при котором ротор ШД выпадает из синхронизма. Под частотой приемистости понимают максимальную частоту тактовых импульсов, при которой возможен пуск ШД из неподвижного состояния без потери шага. Различие этих двух характеристик заключается в том, что первая из них соответствует выходу из синхронизма в режиме вращения ротора, а вторая – при пуске. Поэтому отличие характеристик чисто количественное. На рис. 3 сплошными линиями показан ряд механических характеристик ШД. Они имеют вид горизонтальных отрезков. У синхронных двигателей с круговым вращающимся полем эти отрезки ограничены максимальным синхронизирующим моментом
Основными характеристиками, определяющими свойства ШД как электромеханического преобразователя, являются рабочие динамические характеристики. К ним относятся предельная механическая характеристика и зависимость частоты приёмистости от момента нагрузки. Предельная механическая характеристика – это зависимость тактовой частоты коммутации или, что то же самое, средней скорости вращения ротора, от момента нагрузки на валу, при котором ротор ШД выпадает из синхронизма. Под частотой приемистости понимают максимальную частоту тактовых импульсов, при которой возможен пуск ШД из неподвижного состояния без потери шага. Различие этих двух характеристик заключается в том, что первая из них соответствует выходу из синхронизма в режиме вращения ротора, а вторая – при пуске. Поэтому отличие характеристик чисто количественное. На рис. 3 сплошными линиями показан ряд механических характеристик ШД. Они имеют вид горизонтальных отрезков. У синхронных двигателей с круговым вращающимся полем эти отрезки ограничены максимальным синхронизирующим моментом  , а у ШД в квазистатическом режиме они ограничены моментом нагрузки в соответствии с выражением (1) или пусковым моментом
, а у ШД в квазистатическом режиме они ограничены моментом нагрузки в соответствии с выражением (1) или пусковым моментом  .
.
В установившемся режиме с частотами коммутации выше предельной частоты квазистатического режима  выход из синхронизма наступает при меньших моментах нагрузки вплоть до нулевого при частоте коммутации
выход из синхронизма наступает при меньших моментах нагрузки вплоть до нулевого при частоте коммутации  , когда работа ШД становится вообще невозможной (линия 1 рис. 3). Однако на практике предельная частота коммутации может быть существенно выше вследствие влияния явления механического резонанса. При этом максимальный момент нагрузки на некоторых частотах может превышать значение, соответствующее статическому режиму. В целом предельная механическая характеристика с учетом резонансных явлений имеет вид кривой 2 на рис. 3.
, когда работа ШД становится вообще невозможной (линия 1 рис. 3). Однако на практике предельная частота коммутации может быть существенно выше вследствие влияния явления механического резонанса. При этом максимальный момент нагрузки на некоторых частотах может превышать значение, соответствующее статическому режиму. В целом предельная механическая характеристика с учетом резонансных явлений имеет вид кривой 2 на рис. 3.
Шаговые двигатели находят широкое применение в маломощном приводе систем автоматического управления станков, роботов и манипуляторов, в телемеханике и вычислительной технике.
Динамические характеристики блоков управления шаговых двигателей «НПФ Электропривод»
Компания «НПФ Электропривод» разрабатывает шаговые приводы для любых двух- и четырехфазных двигателей. Главным критерием разработки является возможность управления как отечественными, так и импортными шаговыми двигателями. Определяющим фактором при выборе устройства управления является исключительно ток фазы.
Компания предлагает как драйвера, так и программируемые контроллеры для управления шаговыми двигателями.
Драйвер шаговых двигателей – устройство, управляющее одним двигателем в соответствии с подаваемыми импульсными сигналами шаг/направление, определяющими скорость и направление движения.
Контроллер шаговых двигателей – устройство, управляющее одним или несколькими двигателями и дающее возможность выбора режима управления:
- ручной режим – задание параметров движения осуществляется с помощью кнопок и потенциометров, расположенных на самом блоке;
- режим драйвера – управление подаваемыми импульсными сигналами шаг/направление;
- режим контроллера – запись программы движения в энергонезависимую память блока. Программа дает возможность использовать не только такие простые команды как задание скорости, перемещения, ускорения, но также формировать циклы повторяющихся команд, выставлять паузы, использовать встроенное в контроллер реле и два дополнительных управляющих входа для синхронизации работы с другим оборудованием.
В качестве источника импульсных сигналов может быть использован разработанный двухканальный контроллер SMC-2, который дает возможность управления двумя приводами одновременно и кроме ручного управления предлагает режим программирования каждого канала в отдельности: импульсы подаются в соответствии с составленной программой.
Как известно, одними из основных проблем при использовании шаговых двигателей является потеря момента на больших скоростях и явление резонанса. Для борьбы с резонансом используют дробление шага. Предлагаемые шаговые приводы позволяют дробить шаг в 2, 4, 8, 16, 32 раза.
На больших скоростях ток в обмотках двигателя не успевает достигнуть номинального значения, что приводит к падению момента. Чтобы падение момента происходило как можно медленнее, нужно обеспечить высокую скорость нарастания тока в обмотках двигателя, за что отвечает блок управления. Так же для достижения большой скорости необходимо обеспечивать плавный разгон и торможение, это возможно выполнить с использованием предлагаемых компанией контроллеров.
«НПФ Электропривод» ведет научно-исследовательскую работу в области усовершенствования систем управления шаговыми двигателями.
В целях исследования влияния увеличения скорости на момент в 2012 году был разработан динамометрический стенд, изображенный на рис.1

Рис. 1. Динамометрический стенд
Стенд позволяет снимать характеристики двигателей в диапазоне:
- скорости 0…3000об/мин;
- момента 0…50Нм.
На рис. 2 приведена типичная зависимость момента от скорости шагового двигателя с драйвером серии SMD при напряжении питания 48В, дроблении шага 1/2 и 1/16. Как видно из графика, дробление шага на низких скоростях не приводит к падению момента, уменьшает влияние резонанса и расширяет динамический диапазон работы двигателя.
| Скорость | ||
|---|---|---|
| Шаг/с | 1/2 об/мин | 1/16 об/мин |
| 1000 | 150 | 19 |
| 2000 | 300 | 37,5 |
| 3000 | 450 | 56 |
| 4000 | 600 | 75 |
| 5000 | 750 | 94 |
| 6000 | 900 | 112,5 |
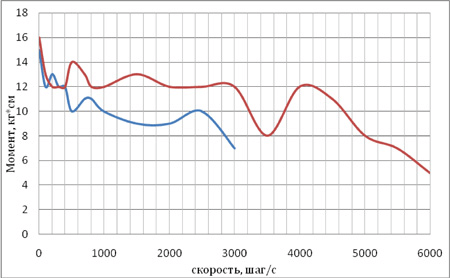
Рис. 2. График зависимости крутящего момента двигателя FL57STH76-2804 с драйвером SMD‑4.2 (напряжение питания 48 В): а – дробление шага 1/2, б – дробление шага 1/16…1/8 оказывает благоприятное влияние на работу двигателя.
На рис. 3 наглядно отображены преимущества и недостатки последовательного и параллельного подключения обмоток.
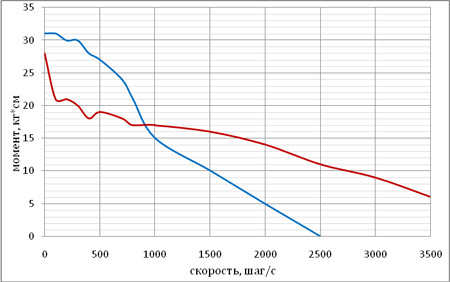
Рис. 3. График зависимости крутящего момента двигателя AD-200-31 с драйвером SMD-4.2 (напряжение питания 48В, дробление 1/2): а – последовательное подключение обмоток, б – параллельное подключение обмоток.
Как видно из графика, при последовательном подключении обмоток статический крутящий момент выше, но с ростом частоты он падает значительно быстрее. При параллельном подключении обмоток статический момент ниже, но сохраняется постоянным дольше.
Такие данные позволяют не только подобрать подходящий двигатель и блок управления, но и выбрать способ подключения обмоток, в зависимости от поставленной перед двигателем задачей.
Подпишитесь на наши новости
Получайте первыми актуальную информацию от ООО «Электропривод»
17HS4401
Nema 17HS4401 характеристики
- Номинальный ток — 1.7 А;
- Крутящий момент — 5.5 кг x см;
- Момент удержания — 2.8 кг х см;
- Угловой шаг — 1.8° ±5%, 200 шагов;
- Индуктивность фазы — 2.8 мГн;
- Сопротивление фазы — 1.5 Ом;
- Число фаз — 2;
- Разъем — 4 PIN;
- Габариты — 42×42×48 мм;
- Диаметр вала — 5 мм;
- Длина вала — 24 мм;
- Фланец — 42 мм.
Шаговый двигатель 17HS4401
Шаговые двигатели имеют достаточно широкое применение в сегодняшнее время. В первую очередь, следует заметить, что это электродвигатели. Следовательно, в них электрическая энергия переходит в механическую. Это недорогой способ решения проблем при сборке различных устройств.
Электродвигатель представляет собой подвижный ротор и неподвижный статор. Первый из них содержит постоянный магнит, а второй катушки, на каждой из которых есть обмотка. Говоря простым языком, намагниченный сердечник окружен катушками с обмоткой. Точно контролируя ток можно заставить вал двигаться дискретно. Электричество подается на одну. Туда притягивается намагниченный вал, потом на другую – снова движение вала. При применении технологии микрошагов, у моторов есть возможность подавать ток одновременно на две катушки и тогда вал будет останавливаться в промежуточном этапе между ними.
Способ подключения обмоток и определяет тип подключения шагового электромотора. Данный вид, исходя из названия, не вращается непрерывно, движение происходит пошагово. Важной характеристикой является шаг ротора, то есть угол, на который поворачивается ротор при одном импульсе, он и является частью полного оборота. И размер этого шага зависит от устройства мотора и от способа управления.
Существуют три вида степперов: с постоянным магнитом, с переменным и гибридные. По видам подключения выделяют униполярный и биполярный. По способам управления: полношаговый, полушаговый и волновой.
Гибридные шаговые, к которым относится 17hs4401 появились позже, и, как и понятно из названия, соединили в себе все плюсы предыдущих вариантов. Основным преимуществом стала возможность сделать угол шага меньше. Мотор прекрасно справляется и с динамическими крутящими моментами и с удерживающими и может производить вращение с гораздо большей скоростью, чем его предшественники. Но стоимость такого выше, однако, это компенсируется его возможностями. Чаще всего можно встретить 100 или 200 микрошагов на целый оборот и с шагом, соответственно 3,6 и 1,8 градуса.
Шаговый электродвигатель NEMA 17hs4401 один из самых популярных из этой серии. Что значит NEMA. Многие ошибочно полагают, что это название компании производителя, однако это Национальная Ассоциация производителей электрооборудования. Хоть она и базируется в США, но, фактически, имеет международные стандарты. В 1984 Ассоциация установила несколько стандартов для размеров, которые используются и сегодня: NEMA 17 и NEMA 23. Часто многие описывая процесс создания какого-либо устройства, а чаще всего его используют для 3D – принтеров, указывают NEMA 17, что характеризует только размер, без учета таких важных факторов как напряжение, ток, угол шага, его полярность.
Основные важные характеристики биполярного гибридного. Размер: 40мм*42мм*42мм. Длина вала 24 мм, его диаметр 5 мм. Расстояние между крепежами 31,5 мм. Сам корпус выполнен из алюминия и пластин стали. Номинальный ток 1,7 А, 2 фазы, сопротивление фазы 1,5 Ом, индуктивность фазы 2,8 мГн, момент инерции 54г*см2, момент удержания 4 кг*1 см, крутящий момент 40 Н/см. Вес 280 грамм. Провода обязательно идут в комплекте. Они могут быть отдельными, а не впаяны в него, а могут быть закреплены внутри. Их четыре и длина обычно около 40 см. Угол 1,8 градуса.
Данный электромотор из-за малого угла вращения позволяет произвести настройки таким образом, что вибрация снижается. Точность возможно увеличить в десять, а то и в двадцать раз. Лучше всего не экспериментировать с драйверами и платами, и использовать Arduino при управлении. Подключается к плате степпер с помощью драйвера А4988. Мотор 17hs4401 биполярный, он более эффективный, так как пользуется всей обмоткой. Минус, а точнее, просто сложность, в том, что для него требуется использование более сложного контроллера. Питаться он может от сети 12 V, что очень удобно при сборке приборов. В этой модели возможно работать с микрошагами, что позволяет лучше позиционировать остановку, и это очень полезно для станков с ЧПУ.
Каким образом подключается двухфазный прибор. При покупке к нему должна прилагаться инструкция с картинками, при отсутствии таковой можно найти фазы опытным путем. Следует использовать мультиметр для «прозвона» проводов попарно. Если сигнала нет, значит, они относятся к разным фазам. Попарно делим провода, основываясь на сигналах мультиметра. Берем драйвер. Либо на нем, либо в его описании есть обозначения А плюс, А минус, и В плюс, В минус. Присоединяем провода, если перепутаются местами плюс и минус, то вращение начнется в другую сторону. Следует поменять их местами для правильного направления.
Использование 17hs4401 очень широко. Его ставят в станках с ЧПУ, аналоговых часах, 3D – принтерах, лазерных граверах, квадрокоптерах. Перечислять можно бесконечно. Увидеть в работе такой движок может даже непрофессионал, когда открывает объектив фотоаппарата и фокусируется на изображении. Скорее всего, именно таким степпером приводится в действие объектив.
Использование такого устройства обеспечивает точность, плавность при грамотном использовании драйверов управления и надежность. Их относительно невысокая стоимость делает процесс создания приборов максимально доступным. Купить такой мотор можно как в магазинах у официальных дилеров, так и в известном всем интернет-магазине. Следует внимательно отнестись к приобретению, потому что качество обмотки – это лотерея в китайских магазинах, но от нее зависит качество двигателя. Единственный момент, необходимо иметь знания для подключения и работы с контроллером, но, скорее всего, человек, который не понимает в электронике и конструировании приборов абсолютно ничего не возьмется за его создание.
§3.5. Режимы работы и характеристики шаговых двигателей
Режимы работы и характеристики шаговых двигателей рассмотрены в данном разделе на примере вращающегося ШД. Однако все основные положения справедливы и для линейного шагового двигателя с заменой моментов на силы и определением электрических углов по формуле (3.21).
Работу ШД считают устойчивой, если он работает без потерь шага, т.е. ротор занимает устойчивое положение, соответствующее положению вектора результирующей МДС статора, при каждом шаге вектора МДС.
Режим работы ШД в значительной мере определяется частотой управляющих импульсов f.
Статический режим (f = 0)
Cоответствует прохождению постоянного тока по обмоткам управления, создающим неподвижное магнитное поле. Основной характеристикой этого режима является зависимость статического синхронизирующего момента Mc от электрического угла рассогласования γэ между продольной осью ротора и МДС статора. Продольная ось ротора совпадает с направлением потока ротора в ШД активного типа и с направлением наименьшего магнитного сопротивления в реактивных и индукторных ШД. Как известно из теории синхронных двигателей (§ 3.1), зависимость Mc периодическая. Основная гармоника синхронизирующего момента
где Mc max — максимальный синхронизирующий момент; Θ1э,Θ2э — электрические углы поворота МДС статора и оси ротора.
Рис 3.25.
На рис. 3.25 показана зависимость (сплошная линия) момента от угла поворота ротора Θ2э при фиксированном положении поля статора когда Θ1э = 0, γэ = — Θ2э
Зоной статической устойчивости Θсу является окрестность точки устойчивого равновесия на угловой характеристике, из любой точки которой после снятия возмущающего воздействия ротор возвращается в исходную точку устойчивого равновесия. При статическом моменте сопротивления Mcт = 0 точка устойчивого равновесия — 0, точки неустойчивого равновесия — А, В, т.е. зона статической устойчивости АОВ симметрична: Θсу = (- π )-(+ π). В случае наличия нагрузки Mcт1 ≠ 0 зона статической устойчивости становится несимметричной, например при Mcт > 0 .
Режим отработки единичных шагов.
Cоответствует частоте управляющих импульсов, при которой переходный процесс, чаще всего колебательный, на каждом шаге заканчивается к началу следующего шага, т.е. угловая скорость ротора Θ2 в начале каждого шага равна нулю (рис. 3.26).
Рис.3.26
В момент времени tα ротор переместился на один шаг, однако он имеет максимальную скорость Θ2 max и кинетическую энергию и продолжает перемещаться против сил поля. Начинается процесс свободных колебаний (качаний) ротора относительно положения устойчивого равновесия, как у всех синхронных микродвигателей (см. § 3.2). Колебания затухают, когда вся кинетическая энергия израсходована на электрические, магнитные и механические потери, вызванные этим процессом. Амплитуда и время затухания колебаний тем меньше, чем больше эти потери.
Основными показателями режима отработки единичных шагов являются перерегулирование ΔΘп , т.е. максимальное отклонение от нового положения устойчивого равновесия ротора при переходном процессе; максимальное значение мгновенной скорости ротора Θ2 max в процессе шага; время затухания свободных колебаний ротора на одном шаге t зат .
У шаговых двигателей желательно уменьшать ΔΘп и t зат при сохранении необходимой мгновенной угловой скорости ротора Θ2.
Установившийся режим работы шаговых двигателей.
Cоответствует постоянной частоте управляющих импульсов, причем t зат больше времени одного такта коммутации.
В установившемся режиме вращение ротора с некоторой средней угловой скоростью
Cопровождается вынужденными колебаниями относительно мгновенной точки устойчивого равновесия. Амплитуда колебаний достигает наибольшего значения при частоте управляющих импульсов, совпадающей с резонансной — собственной частотой ротора.
Если время электромагнитных переходных процессов значительно меньше, чем механических, движение ротора ненагруженного ШД математически можно описать уравнением равновесия моментов:
где Мдин— динамический момент сопротивления; Мдем — демпфирующий электромагнитный момент; Мт — момент трения.
Динамический момент определяется моментом инерции ротора J и ускорением:
Мдин= J·d 2 Θ2 /dt 2 = J/Pм · d 2 Θ2э/dt 2 (3.25)
Внутренне электромагнитное демпфирование колебаний ротора обеспечивается за счет наведения ЭДС вращения в обмотках управления. В ШД активного типа ЭДС вращения наводится потоком возбуждения ротора, в индукторных и реактивных ШД — переменной составляющей потока возбуждения, возникающей в результате изменения магнитного сопротивления при вращении ротора. ЭДС вращения вызывает в цепи обмоток управления дополнительные токи, которые во взаимодействии с вызвавшим их потоком создают демпфирующий момент, препятствующий изменению угловой скорости ротора. Значение демпфирующего момента пропорционально угловой скорости ротора:
Мдэм=D·d 2 Θ2э/dt 2 (3.26)
где D — коэффициент демпфирования.
Наибольший коэффициент демпфирования у ШД активного типа, у реактивных двигателей он близок к нулю.
Если пренебречь моментом трения Мт и рассматривать работу ШД при малых углах рассогласования осей ротора и МДС статора (sin γ ≈ γ), то подставив (3.22), (3.25) и (3.26) в (3.24), получим дифференциальное уравнение движения ротора:
 (3.27)
(3.27)
В выражении (3.27) коэффициент при есть квадрат угловой частоты собственных колебаний ротора (рад/с): ω=√(Mc max·pм /J). Частота управляющих импульсов, соответствующая главному резонансу, f=ω/2π.
Важной характеристикой установившегося режима является предельная механическая характеристика — зависимость предельного вращающего момента шагового двигателя Mдвиг.от частоты управляющих импульсов (рис. 3.27, а).
Рис. 3.27
Она определяет тот предел, до которого при данной частоте управляющих импульсов можно плавно нагружать вал ШД, сохраняя при этом синхронный режим. Предельную механическую характеристику рассматривают обычно при f > f.
С увеличением частоты происходит уменьшение вращающего момента ШД, что объясняется в основном двумя факторами: действием демпфирующего момента от ЭДС вращения и тем, что ЭДС самоиндукции в обмотках управления становится соизмеримой с напряжением источника питания и ток в обмотках управления за время такта не успевает нарастать до установившегося значения, что снижает результирующий поток статора. Снижение синхронизирующего момента тем резче, чем больше электромагнитная постоянная времени обмоток управления.
Переходные режимы.
Переходные режимы — пуск, торможение, реверсирование, переход с одной частоты на другую — сопровождаются переходными процессами в ШД, вызванными изменением частоты управляющих импульсов и угловой скорости ротора.
Важным показателем переходного режима является приемистость ШД — наибольшая частота управляющих импульсов fш.дв., отрабатываемых шаговым электродвигателем без потери шагов при пуске из состояния фиксированной стоянки под током.
Скачкообразное увеличение частоты управляющих импульсов при пуске от нуля до рабочей частоты приводит к тому, что в начале ротор отстает от МДС статора под действием момента инерции вращающихся частей. По мере ускорения он достигает угловой скорости МДС статора и за счет запасенной кинетической энергии может опередить МДС. Постепенно колебания затухают и двигатель переходит в установившийся режим. Таким образом, в процессе пуска может возникнуть расхождение между числом шагов ротора и МДС статора. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага и момента инерции вращающихся частей; момент трения отрицательно влияет на приемистость (рис. 3.27, б).
С целью повышения приемистости при пуске ШД может применяться форсировка. В современных схемах форсировка часто производится модуляцией амплитуды импульса напряжения на обмотках управления. В начальный момент подачи импульса амплитуда напряжения с помощью специального регулятора устанавливается завышенной. Ток, нарастая по экспоненте с повышенным установившимся значением, достигает номинального значения за более короткий отрезок времени; в этот момент времени напряжение снижается до номинального. Указанный регулятор должен функционировать с частотой коммутации обмоток.
Предельная частота торможения из установившегося режима вращения несколько выше предельной частоты пуска, поскольку, в частности, момент трения на валу двигателя способствует торможению. Предельная частота реверса на 30—40% ниже предельной частоты пуска.