
Шаговый двигатель как подключить провода
Arduino.ru
шаговый двигатель с 5 выводами
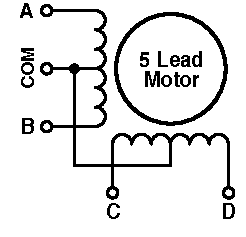
 Имеется шаговый мотор с 5 выводами.Что я смог выяснить — этот моточик имеет 4 обмотки и один из выводов общий для всех выводов и сопротивление 5 Ом.
Имеется шаговый мотор с 5 выводами.Что я смог выяснить — этот моточик имеет 4 обмотки и один из выводов общий для всех выводов и сопротивление 5 Ом.
Заказал с китая CNC шилд с драйверами DRV8825. Можно ли этот движок как то подключить к этому шилду?

Вы уверены, что именно четыре обмотки?
Скорее вскего у вас обычный двухобмоточный униполярник. Просто подключите обмотки (без общего) к драйверу. Ваш униполярный шаговик станет биполярным.
В принципе, это может быть на самом деле четырехобмоточный униполярник, но тогда должно быть больше выводов.
Электрические параметры не удалось узнать?
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Не станет, у обмоток середина общая. Вот если удастся разъединить средний провод обмоток, то можно сделать биполярный, но это потребует разборки двигателя. Проще подключить через ULN2003 или подобным способом.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Не станет, у обмоток середина общая. Вот если удастся разъединить средний провод обмоток, то можно сделать биполярный, но это потребует разборки двигателя. Проще подключить через ULN2003 или подобным способом.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
 Это плата принтера. «Армия транзисторов» на снимке -это драйвер на 2 шаговика?
Это плата принтера. «Армия транзисторов» на снимке -это драйвер на 2 шаговика?
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии

Сопротивление между «общим» и » любым другим » 5 Ом?
А между двумя любыми 10 ОМ?
Тогда униполярник. И что-то типа 2003 для управления (4 ключа на землю.)
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Не станет, у обмоток середина общая. Вот если удастся разъединить средний провод обмоток, то можно сделать биполярный, но это потребует разборки двигателя. Проще подключить через ULN2003 или подобным способом.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Сопротивление между «общим» и » любым другим » 5 Ом?
А между двумя любыми 10 ОМ?
Тогда униполярник. И что-то типа 2003 для управления (4 ключа на землю.)
Поменял тестер.Сопротивление между «общим» и » любым другим » 4,2 Ом.А между двумя любыми 7ОМ(?возможно тестер не точный)
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Там еще 1 драйвер SLA 7024M имеется.А можно этот драйвер подключить к ардуине?
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Я их плохо умею читать, так что со схемой не подскажу.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Там еще один моторчик(биполярный) SLA 7024M крутит его. но этот моторчик с шестерней на валу и поменьше, для него и DRV8825 подойдет. А мотор с 5 выводами с с шкивом и не знаю как подключить к CNC шилду. Вернее можно pro mini + что-то типа 2003 или полевики , но облом с дроблением шага и с всякими защитами который предоставляетDRV8825
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
ну зачем впихивать невпихуемое
купите драйвер для вашего мотора или купите мотор под ваш драйвер
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии

используй родной драйвер и не парься. 4 вывода управления. по даташину и плате найдешь куда выходят. скорее всего какой то разъем
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Открыл верхнюю крышку, как и предполагали — один из выводов общий для всех выводов. Перепаял провода. получился биполярник Сопротивлением обмоток 5,5 Ом. (Прежние измерения не правильные из-за щупа тестера). Приедут драйверы проверю работу мотора, а так покрутил руками ротор никаких заеданий об статор не ощущается.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
У вас классический шаговик униполярник.
Надо вскрывать так чтобы отрезать средний провод разьединив обе обмотки в самостоятельные. Читайте разницу униполярного и биполярного моторв. Вопросы сами отпадут.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Там не 2 а 4 обмотки логических,реальных 8.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
 Вот схема. Где крестик перерезал. art100 а почему с драйверами DRV8825 работать не будет? посылка думаю недели через 2 доедут посмотрим
Вот схема. Где крестик перерезал. art100 а почему с драйверами DRV8825 работать не будет? посылка думаю недели через 2 доедут посмотрим
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Вот схема. Где крестик перерезал. art100 а почему с драйверами DRV8825 работать не будет? посылка думаю недели через 2 доедут посмотрим
Ваш двигатель уже не делается или другими словами модно разьемчик http://www.eminebea.com/content/html/en/hybrid_list/pdf/17PM-K.pdf
В принципе разобрать порезать собрать не проблема. Проблема когда магнит прижимается всей мощью к статору собрать и чтоб вращался. Поэтому если есть возможность не раскручивая держащие винты-шпильки порезать провода проблемы нет. Я так много раз делал.
P.S.перечитал ваш пост еще раз не на скорую руку. Раз порезали и не заклинили. Поздравляю. Работать будет.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Вот схема. Где крестик перерезал. art100 а почему с драйверами DRV8825 работать не будет? посылка думаю недели через 2 доедут посмотрим
Ваш двигатель уже не делается или другими словами модно разьемчик http://www.eminebea.com/content/html/en/hybrid_list/pdf/17PM-K.pdf
В принципе разобрать порезать собрать не проблема. Проблема когда магнит прижимается всей мощью к статору собрать и чтоб вращался. Поэтому если есть возможность не раскручивая держащие винты-шпильки порезать провода проблемы нет. Я так много раз делал.
P.S.перечитал ваш пост еще раз не на скорую руку. Раз порезали и не заклинили. Поздравляю. Работать будет.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Я подключился просто к 4м проводам 5й оставил в покое и работает подобные оставил на 3д принтер.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Я подключился просто к 4м проводам 5й оставил в покое и работает подобные оставил на 3д принтер.
Нет. Это слишком простое решение.
- Войдите или зарегистрируйтесь, чтобы получить возможность отправлять комментарии
Я подключился просто к 4м проводам 5й оставил в покое и работает подобные оставил на 3д принтер.
Чисто теоретически это возможно.
Ведь каждая пара обмоток является делителем напряжения на 2
и в соединённых средних точках напряжение равно половине питания.
Но это всё справедливо только при полной симметрИи катушек. Включая и их индуктивность.
Чего в природе обычно не бывает.
Поэтому по проводнику соединяющему эти средние точки будет протекать ток.
Надеюсь небольшой .
Провод подключения шагового двигателя 4pin — 6pin 80см
Провод подключения шагового двигателя 4pin — 6pin 80см
Кабель предназначен для передачи питания на шаговые двигатели с разъемом XH2.54 — 6pin, на другом конце стандартный XH2.54 — 4pin разъем.
Стандартная расцветка жил для 4-х проводного подключения: черный и зеленый A +, A- красный и синий B +, B-
Длина: 80 см
Разъем: XH2.54 — 4pin
Разъем: XH2.54 — 6pin
- Рекомендации
- Каталог
- Пластик для 3D-принтеров
- Фотополимеры для 3D-печати
- 3D-принтеры
- Запчасти Материалы Инструменты для 3D-печати
- Адгезия
- Клеи для 3D-печати
- Лопатки, шпатели
- Подложки, покрытия стола
- Блоки, картриджи нагревательные
- Блоки нагревательные
- Картриджи нагревательные
- Термисторы
- Валы
- Вентиляторы
- Зубчатые ремни, шкивы, ролики
- Ремни зубчатые
- Ролики
- Шкивы
- Инструменты для 3D-печати
- Механика 3D-принтера
- Муфты
- Рельсы
- Трапециедальные гайки и винты
- Шаговые двигатели
- Подшипники
- Линейные подшипники
- Радиальные подшипники
- Постобработка
- Механическая постобработка
- Химическая постобработка
- Сопла
- Иглы, сверла для чистки сопел
- Сопла для 3D-принтеров
- Термобарьеры, тефлоновая трубка
- Экструдеры
- Механизмы подачи пластика
- Радиаторы
- Хотенды
- Шестерни подачи
- Электроника
- Блоки питания
- Датчики
- Драйвера
- Нагревательные столы 3D-принтера
- Платы управления
- Провода, розетки
- Шаговые двигатели
- Экраны
- Элементы корпуса
- Алюминиевый профиль
- Винты
- Гайки Т-образные
- Сухари пазовые
- Уголки, заглушки для профиля
- Адгезия
- Профиль алюминиевый конструкционный
- Алюминиевый профиль
- Винты
- Гайки Т-образные
- Сухари пазовые
- Уголки, заглушки для профиля
- 3D-ручки
- Пластик для 3D-ручки
- Трафареты для 3D-ручек
- Наборы трафаретов
- Трафареты для скачивания
- Гаджеты
- Роботы
- Пистолеты виртуальной реальности
- 3D-ручки
- Услуги 3D-печати
- Каталог
- Как купить?
- Доставка
- Оплата
- О магазине
- Контакты
- Перейти на сайт г.Москва
- Войти
- Регистрация
Телефон: +7 (4212) 936-836, +7 (924) 403-68-36
Шаговые двигатели (подробный разбор 4 типов)
Шаговые двигатели (подробный разбор 4 типов)
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей: переменной индуктивности, двигатели с постоянными магнитами, и гибридные двигатели.
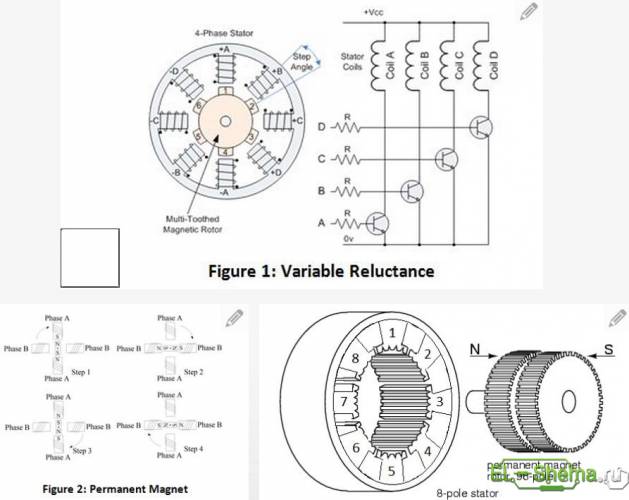
Двигатели переменной индуктивности используют только генерируемое магнитное поле на центральном валу, заставляющее вращаться и находиться на одной линии с напряжением электромагнитов.
Двигатели с постоянными магнитами похожи на них, за исключением того, что центральный вал поляризован у северного и южного магнитных полюсов, которые будут соответствующим образом поворачивать его в зависимости от того, какие электромагниты включены.
Гибридный мотор — это сочетание двух предыдущих. У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. В связи с двойным набором зубов на центральном валу, гибридный двигатель имеет наименьший доступный размер шага и поэтому является одним из наиболее популярных типов шаговых двигателей.
Работа схемы
Схема подключения шагового двигателя к плате Arduino представлена на следующем рисунке.
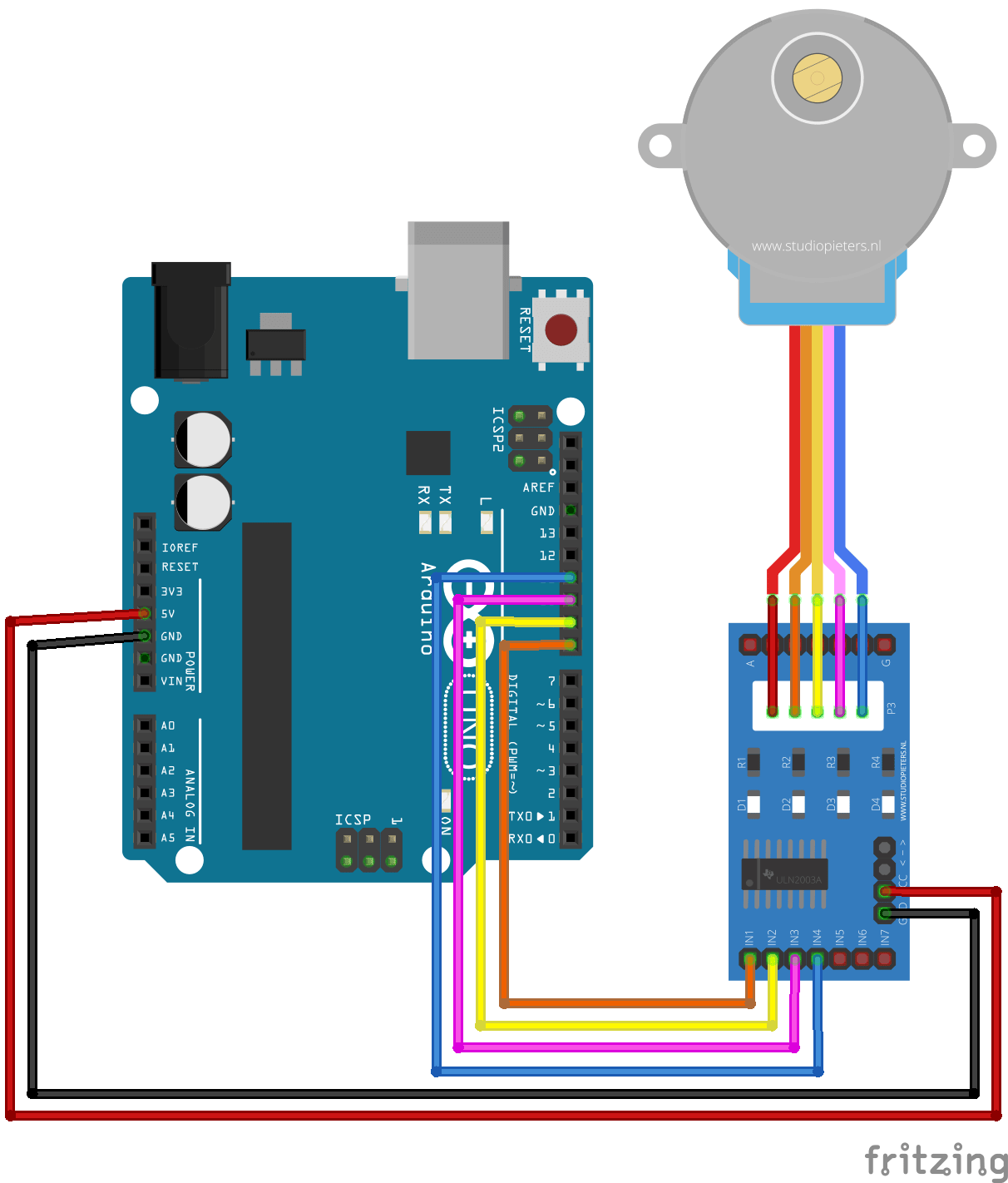
Мы использовали шаговый двигатель 28BYJ-48 и драйвер мотора ULN2003. Для подачи питания на 4 катушки шагового двигателя мы будем использовать контакты платы Arduino 8, 9, 10 и 11. Драйвер мотора запитывается от контакта 5V платы Arduino.
Но если вы будете подсоединять какую-нибудь нагрузку к шаговому двигателю, то вам потребуется внешний источник питания для драйвера мотора. Мы в нашем примере эксплуатируем шаговый двигатель без нагрузки, поэтому нам и хватило питания от платы Arduino. И не забудьте соединить землю платы Arduino с землей драйвера мотора.
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу.

В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером. Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
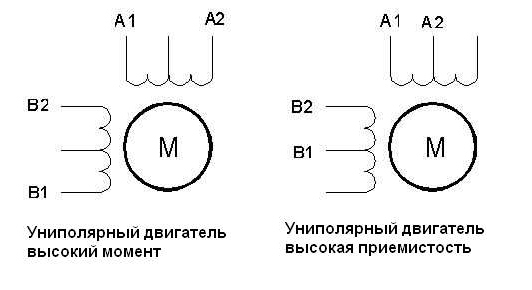
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
Принцип работы шагового двигателя
В зависимости от конструкции, сегодня применяются три вида шаговых двигателей: с постоянным магнитом, с переменным магнитным сопротивлением и гибридные двигатели. У двигателей с постоянным магнитом число шагов на один оборот вала доходит до 48, то есть один шаг соответствует повороту вала на 7,5°. Гибридные двигатели обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).
 Фото. Устройство шагового мотора в разрезе
Фото. Устройство шагового мотора в разрезе
Подсчитав количество сделанных шагов, можно определить точный угол поворота ротора. Таким образом, шаговый двигатель является сегодня идеальным приводом в 3D принтерах, станках с ЧПУ и в другом промышленном оборудовании. Это лишь краткий обзор устройства и принципа работы stepper motor, нас больше интересует, как осуществляется управление шаговым двигателем с помощью Ардуино.
Описание библиотеки для работы с шаговым двигателем
В среде разработки Ардуино IDE существует стандартная библиотека Strepper.h для написания программ шаговых двигателей. Основные функции в этой библиотеке:
- Stepper(количество шагов, номера контактов). Эта функция создает объект Stepper, которая соответствует подключенному к плате Ардуино двигателю. Аргумент – контакты на плате, к которым подключается двигатель, и количество шагов, которые совершаются для полного оборота вокруг своей оси. Информацию о количестве шагов можно посмотреть в документации к мотору. Вместо количества шагов может быть указан угол, который составляет один шаг. Для определения числа шагов, нужно разделить 360 градусов на это число.
- Set Speed(long rpms) – функция, в которой указывается скорость вращения. Аргументом является положительное целое число, в котором указано количество оборотов в минуту. Задается после функции Step().
- Step(Steps) –поворот на указанное количество шагов. Аргументом может быть либо положительное число – поворот двигателя по часовой стрелке, либо отрицательное – против часовой стрелки.
Шаг 6: Схема соединения
Схема соединения нашего проекта Ардуино шагового двигателя ниже.




Для шагового двигателя Ардуино 4 вывода на H-Bridge должны подключаться к 4 выводам двигателя. Затем 4 логических вывода подключаются к Arduino (8, 9, 10 и 11). Как показано на диаграмме выше, для питания двигателей можно подключить внешний источник питания. Чип может обрабатывать внешний источник питания от 4,5 до 36 В (мы выбрали батарею 9В).
Шаговый двигатель как подключить провода
В предлагаемом материале описана несложная разработка, позволяющая управлять шаговым двигателем, подключенным к LPT порту IBM-совместимого компьютера.
Параллельный порт является великолепным интерфейсом, позволяющим подключать к персональному компьютеру множество самых различных устройств. Однако он может быть легко поврежден, поэтому при его использовании для подсоединения самодельных внешних устройств нужно быть очень внимательным. Если вы не уверены в том, что вы все делаете правильно, сначала проконсультируйтесь у специалистов и только потом экспериментируйте.
Ниже приводится краткое описание параллельного порта.
Параллельный порт имеет несколько линий ввода/вывода, которые могут быть разделены на две группы — линии передачи данных и линии сигналов управления. Линии передачи данных — двунаправленные (разумеется, речь идет о режимах ЕСР/ЕРР), и именно их мы и будем использовать. В табл.1 описано назначение выводов разъема порта LPT.
Для эксперимента был использован шаговый двигатель от старого 5,25-дюймового дисковода модели FD-55GFR фирмы Теас. У этого двигателя оказалось пять выводов. В большинстве источников описываются шаговые двигатели, имеющие шесть выводов. Существуют также описания 4-выводных шаговых двигателей, у которых не подключены средние выводы и которые требуют двухполярного напряжения для управления. Поиск в Интернете дал ответ: этот шаговый двигатель похож на шаговые двигатели с шестью выводами, но две обмотки у него соединены в одной точке, и наружу выведен один провод, подсоединенный к ним. Для более подробного знакомства с шаговыми двигателями можно посетить страницу в Интернет по адресу: www.HowStuffWorks.com, задав поиск для шаговых двигателей (страница на английском языке — прим. переводчика).
Процесс извлечения двигателя из дисковода несложен — требуется всего лишь отвернуть несколько винтов. К валу двигателя с помощью винтика прикреплена тонкая металлическая полоска, нужно соблюдать осторожность, чтобы не порезаться об нее в процессе ее извлечения.
После извлечения шагового двигателя следует убедиться, что он исправен. Простейший способ это сделать — замкнуть все выводы двигателя между собой и попробовать повернуть его вал. Вал должен проворачиваться с трудом, по сравнению с тем, как он проворачивается при разомкнутых выводах. Также с помощью тестера можно проверить целостность обмоток двигателя. Выводы каждой из обмоток следует пометить. Идентифицировать выводы шагового двигателя можно следующим способом:
1. Подсоедините вывод любой обмотки двигателя к выводу питания +12 В, а к другому выводу этой обмотки — общий провод. Вал должен провернуться на небольшой угол. Пометьте первый вывод цифрой 1.

2. Оставьте эти два вывода в одном месте. Теперь подключите выводы других обмоток к источнику питания 12 В. Обратите внимание, что эти два вывода заставляют шаговый двигатель поворачивать вал на небольшой угол в другую сторону. Отметьте один из них номером 2, другой — номером 4.
3. Оставшийся вывод обозначьте номером 3.
Прим. переводчика: я использовал шаговый двигатель от русского дисковода. Тип двигателя: ПБМГ-200-265Ф(аналоги). Для определения выводов применялся тестер. При этом я зарисовал схему обмоток, фиксируя на ней измеренные сопротивления. Оказалось, что двигатель имеет четыре обмотки. Две обмотки соединены друг с другом и имеют общий провод белого цвета, вторые выводы этих обмоток красного и зеленого цвета. Две другие обмотки также соединены друг с другом и имеют общий провод черного цвета, вторые выводы этих обмоток голубого и желтого цвета. Если соединить белый и черный провода, получается практически та же схема, что и описанная в оригинальной статье. Порядок подключения выводов я определил опытным путем.
Для управления шаговым двигателем можно использовать микросхему драйвера ULN2003, которая содержит семь мощных транзисторных ключей, собранных по схеме Дарлингтона. Каждый ключ способен управлять нагрузкой с током потребления до 500 мА. Микросхема имеет резисторы в цепи базы, что позволяет напрямую подключить ее входы к обычным цифровым микросхемам. Все эмиттеры соединены вместе и выведены на отдельный вывод. На выходах транзисторных ключей имеются защитные диоды, что позволяет управлять с помощью этой микросхемы индуктивными нагрузками при минимуме внешних компонентов. В нашей конструкции использовано только четыре транзисторных ключа. Электрическая схема подключения шагового двигателя показана на рис. 2.
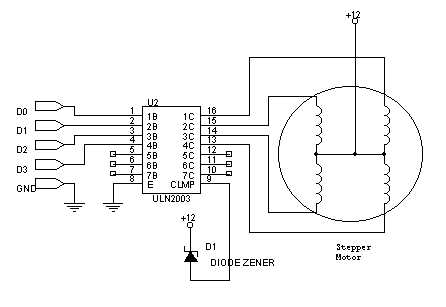
Обратите внимание, что первый вывод шагового двигателя, идентифицированный с помощью описанной ранее процедуры, подсоединен к линии DO параллельного порта (разумеется, через микросхему ULN2003). Каждый следующий вывод подсоединен к соответствующему выводу параллельного порта. Если порядок подключения выводов шагового двигателя неверный, вал мотора будет не вращаться, а лишь поворачиваться на небольшой угол из одной стороны в другую и наоборот. Общий провод схемы подсоединен к источнику питания не напрямую, а через стабилитрон. Это сделано с целью защиты схемы от напряжения ЭДС самоиндукции, возникающего в катушках при резком выключении напряжения питания схемы.
Программа, разработанная для описываемого устройства, достаточно проста. Она управляет выводами порта и формирует на них специальную последовательность импульсов. Эта последовательность показана в табл. 2 и 3.
Различие между алгоритмами (полным и половинным углом поворота вала на один шаг) состоит в том, что во втором случае скорость вращения оказывается в два раза ниже, при этом в два раза уменьшается угол поворота вала двигателя на каждом шаге, т. е. увеличивается разрешающая способность системы. Также во втором случае примерно в два раза увеличивается потребляемая мощность, и кроме того, двигатель способен развивать в два раза больший крутящий момент.
Для изменения направления вращения вала двигателя необходимо формировать указанные последовательности в обратном порядке.
| № шага | D0 | D1 | D2 | D3 |
|---|---|---|---|---|
| 1 | 1 | |||
| 2 | 1 | |||
| 3 | 1 | |||
| 4 | 1 |
| № шага | D0 | D1 | D2 | D3 |
|---|---|---|---|---|
| 1 | 1 | |||
| 2 | 1 | 1 | ||
| 3 | 1 | |||
| 4 | 1 | 1 | ||
| 5 | 1 | |||
| 6 | 1 | 1 | ||
| 7 | 1 | |||
| 8 | 1 | 1 |
Ниже приведен короткий пример программы для Turbo С, работающей в операционной системе MS-DOS. Эта программа заставляет шаговый двигатель вращаться в прямом направлении, в режиме полного угла на один шаг.

