
Шаговый двигатель как проверить работоспособность
Шаговый двигатель как проверить работоспособность
Проверка исправности шагового двигателя наручных кварцевых часов
Исправность шагового двигателя проверить измерением сопротивления катушки и сопротивления изоляции катушки шагового двигателя прибором П157А или прибором Ц-4324.
Для измерения сопротивления катушки ШД на панели прибора П157А нажать кнопку „10 к “. Плюсовой щуп подключить к гнезду VIR, а минусовой к гнезду „.“
“. Плюсовой щуп подключить к гнезду VIR, а минусовой к гнезду „.“
Если измерение производится в механизме часов, то необходимо отсоединить ШД от БКГ или снять БКГ.
Установить щупы прибора на выводы ШД, как показано на рис. 16. Сопротивления катушек шаговых двигателей часов указаны в таблице 2.
Если величина сопротивления катушки не в указанном допуске, то шаговый двигатель (катушку) следует заменить на годный (ую).
Для измерения сопротивления изоляции катушки ШД настроить прибор так же, как при измерении сопротивления катушки.
Установить один щуп прибора на „массу», а другой поочередно на выводы катушки ШД (рис. 16). Индикатор VIR должен показать цифру 1.
Для измерения сопротивления катушки ШД прибором Ц-4324 установить кнопочный переключатель рода работы прибора в положение „к“, а переключатель пределов измерения в положение „10 к“. Замкнуть щупы прибора и ручкой „уст. 0“ установить стрелку прибора на „0“ по шкале „к“.
Установить щупы прибора на выводы ШД (рис. 16).
Для измерения сопротивления изоляции катушки шагового двигателя настроить прибор так же, как при измерении сопротивления катушки.
Установить один щуп прибора на „массу», а другой поочередно на выводы катушки ШД.
Стрелка прибора должна остаться в крайнем левом положении шкалы „к“. Если при измерении стрелка прибора отклоняется вправо, это означает нарушение изоляции катушки шагового двигателя. Шаговый двигатель следует заменить на годный.
В случае, когда проверенный ШД в часах не функционирует, следует установить в механизм контрольный, заведомо годный ШД. Если при этом часы работают, то проверяемый ШД обладает недостаточным крутящим моментом и подлежит замене на годный.
Примечание. При наличии приборов для измерения момента вращения на валу ШД контроль этого параметра проводить по методике, изложенной в инструкции по эксплуатации на эти приборы.
Замок с радиоуправлением на Arduino.
Наверное, у каждого есть место, где лежат личные вещи, и вы не хотите, чтобы к ним был доступ у других. Как же защитить от несанкционированного доступа к личным вещам? Сделать навесной замок, или, может, установить врезной замок? Но мы не будем искать легких путей, и, в данном Arduino проекте , сделаем замок с радиоуправлением на Arduino. Это достаточно простой проект, и повторить его будет несложно. Но у вас должна быть возможность распечатать несколько деталей на 3D принтере. Блоги о 3Д принтере сегодня очень распространены, и также можно заказать печать в вашем городе, относительно недорого.
Описание работы механизма замка на Arduino.
Механическая часть замка взята из интернета, и называлась она «Door lock with Arduino», скачать исходные материалы можно со страницы автора. Механическая часть замка сделана неплохо, но кода управления нет, поэтому я решил сделать свою версию замка.
Распечатал всё необходимое для проекта. А из подручных материалов собрал вот такой макет двери, чтобы наглядно можно было проверить работу замка.

Принцип работы замка.
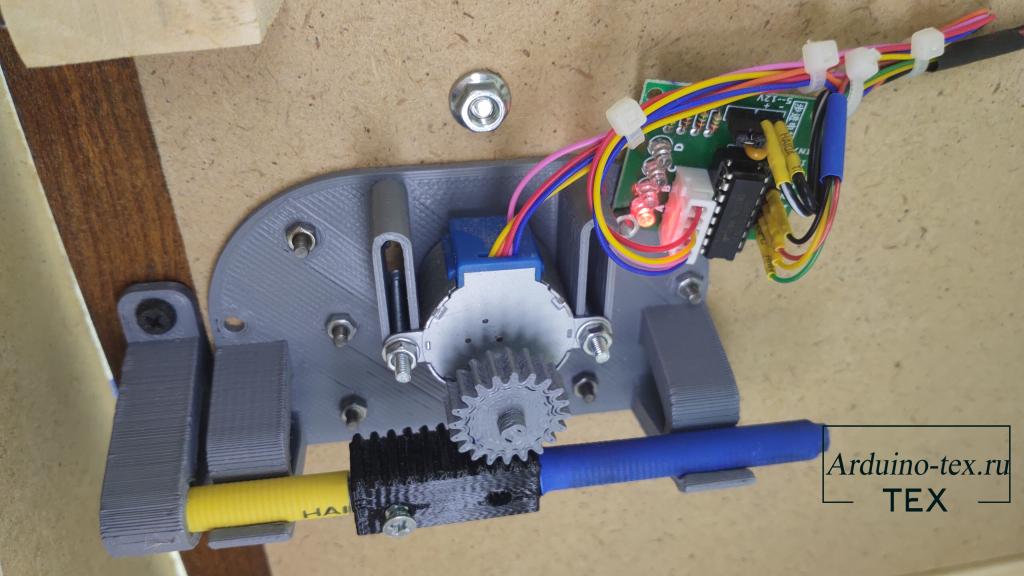
Замок работает достаточно просто, на шпильку диаметром 8 мм надевается напечатанная деталь с зубцами, в виде реечной передачи. Так как у меня не было под рукой нужной шпильки, я использовал строительную шпильку М8 с резьбой, чтобы резьба не мешала скольжению, надел термоусадочную трубку с обоих концов шпильки. Зафиксировал шпильку с помощью винта.
Шпилька устанавливается на основание, которое прикручивается к двери. Также, на основание крепится шаговый двигатель 28BYJ-48. На вал двигателя одевается шестеренка, которая и перемещает нашу шпильку.
Также напечатал ответную часть, которая устанавливается на дверной косяк, и позволяет закрывать двери. Если у вас есть боковая стенка, в которой можно сделать отверстие, данную деталь можно и не печатать.
Электроника радиозамка на Arduino.
Как вы поняли, приводом замка будет шаговый двигатель 28BYJ-48. Шаговый двигатель продается вместе с драйвером ULN2003, что позволяет без проблем подключить шаговый двигатель к ардуино. Подробнее о подключении шагового двигателя 28BYJ-48 читайте в уроке: «Подключаем к Arduino Шаговый двигатель 28BYJ-48 на драйвере ULN2003».
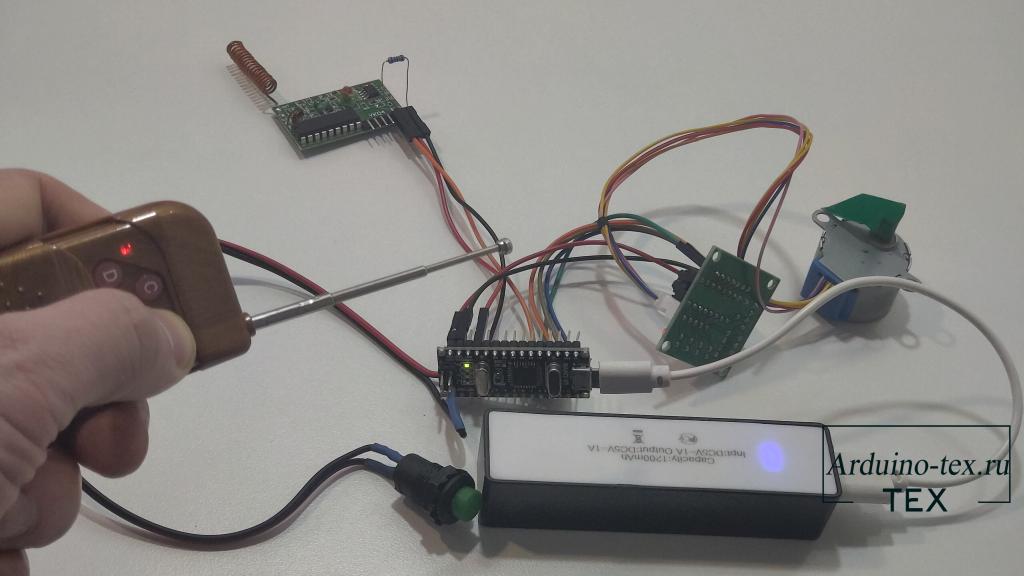
Для проверки работоспособности собрал всю электронику на столе. И вот что получилось.
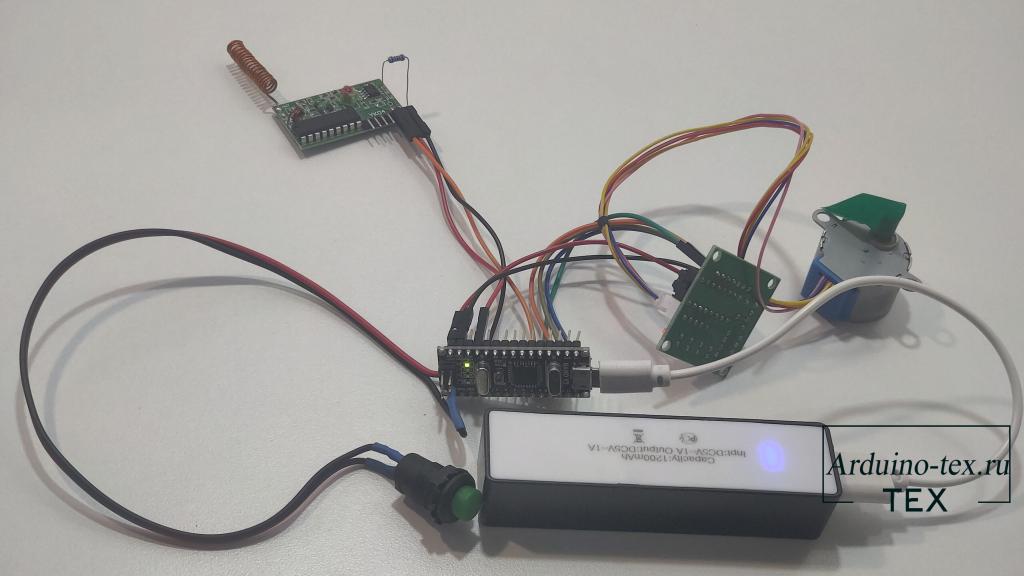
Схема для теста радиоуправляемого замка на Arduino.
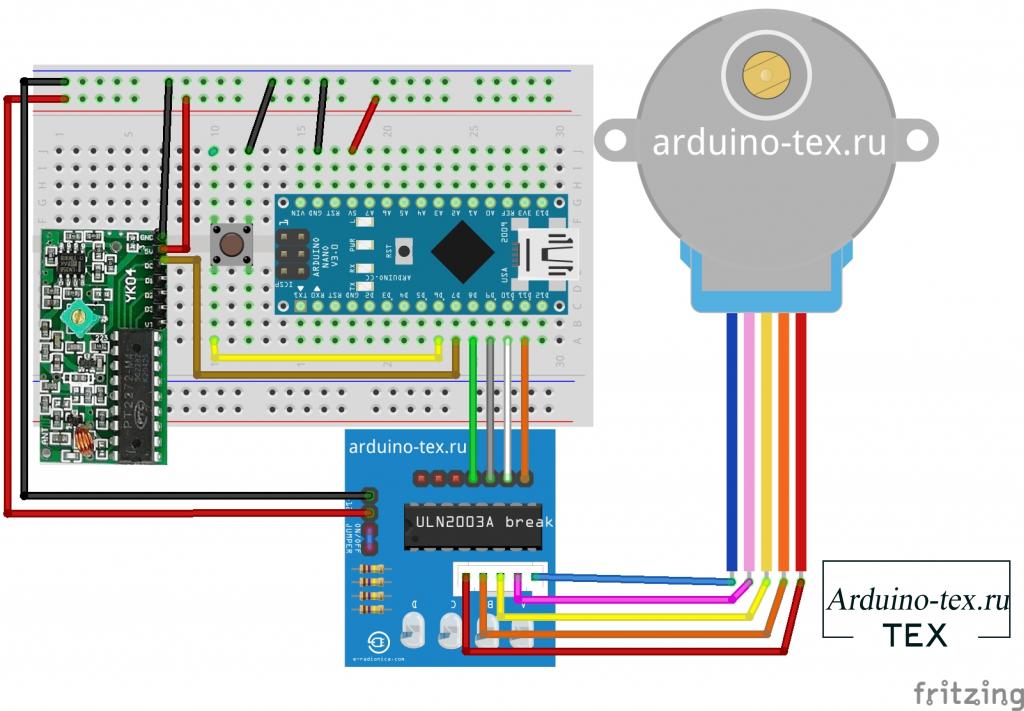
Для проверки работоспособности использовал, вместо конечного выключателя, обычную тактовую кнопку.
Давайте рассмотрим алгоритм работы замка для того, чтобы можно было написать код.
Алгоритм работы радиоуправляемого замка.
Замок должен работать стабильно, и перемещать шпильку в нужном направлении, при определённых условиях. При внештатной ситуации не должно происходить перемещения, чтобы ничего не повредить, и при дальнейшем использовании дверей, без проблем ее открывать и закрывать.
- Когда мы закрываем, дверной замок должен срабатывать на закрытие. Для подачи сигнала установим конечный выключатель, при срабатывании которого подаем сигнал на вращение шагового двигателя для закрытия замка.
- Дверь закрыта, о чем сигнализирует замкнутый контакт конечного выключателя. Для открытия дверей нужно нажать на кнопку на пульте управления. После чего двигатель начнет отрывать замок.
- После открытия замка мы открываем дверь. При открытии дверей, если мы случайно нажмем на пульте на кнопку открыть, ничего не должно происходить. Это связано с тем, что дверь открыта и замок находится в открытом состоянии.
- При закрытии дверей мы должны также запретить повторное закрытие замка. Если вдруг будет ложное срабатывание конечного выключателя, или прочий форс-мажор.
Такой нехитрый алгоритм работы замка должен быть.
Пояснение к коду замка на Arduinoс радиопультом.
Для управления шаговым двигателем будем использовать библиотеку AccelStepper library. Про работу с данной библиотекой рассказывал в уроке про драйвера шаговых двигателей: «Как подключить A4988 (DRV8825) к Arduino? Скетч, библиотека». Но еще раз повторюсь, как её установить.
Установка библиотеки AccelStepper.
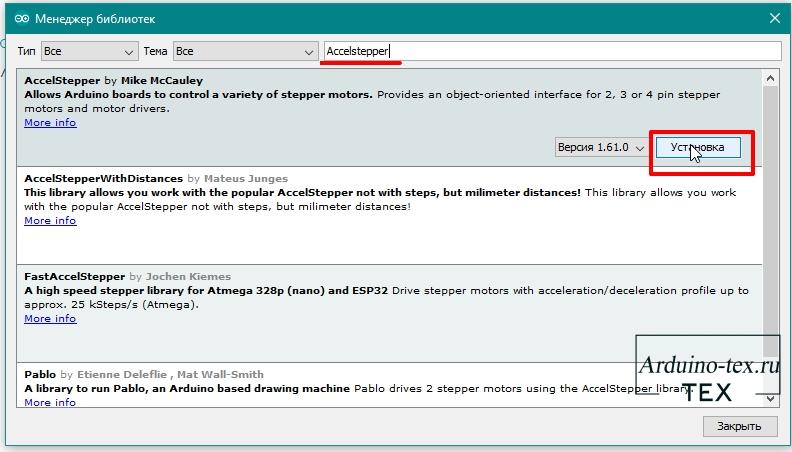
Чтобы установить библиотеку, перейдите в «Скетч» -> «Подключить библиотеку» -> «Управление библиотеками». Подождите, пока диспетчер библиотек загрузит индекс библиотек, и обновит список установленных библиотек.
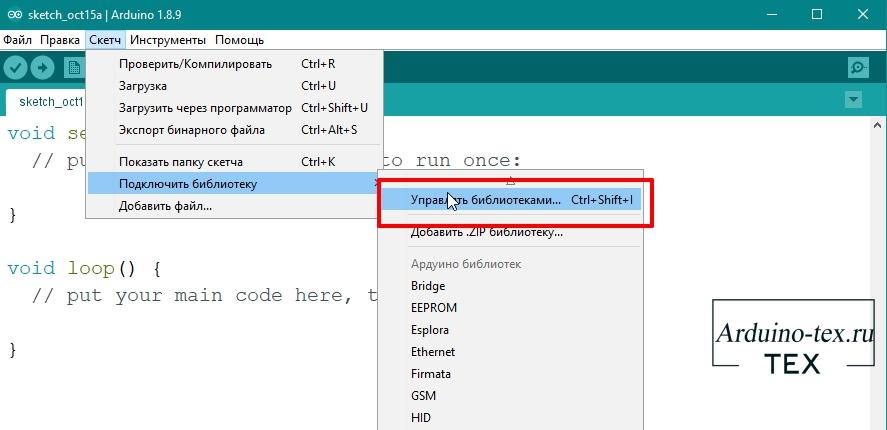
Отфильтруйте свой поиск, набрав «Accelstepper». Щелкните первую запись и выберите «Установка».
Библиотека поддерживает все основные функции для разных типов шаговых двигателей. Достаточно только в коде указать тип вашего шагового двигателя, который вы используйте, и правильно его подключить, и инициализировать работу с ним. В связи с тем, что мы используем в проекте униполярный двигатель, а в уроке, про который я говорил, используются биполярные двигатели, то подключение будет отличаться.
Скетч замка с радиоуправлением на Ардуино.
Пояснение к коду.
Подключаем библиотеку AccelStepper, и указываем тип шагового двигателя, в нашем случае это «8».
Указываем пины подключения конечного выключателя и радиомодуля HY-DJM-5V. Подробное описание радиопульта и радиоприемника HY-DJM-5V читайте в уроке: «Радиопульт с приемником HY-DJM-5V. Подключаем к Arduino».
Определим пины подключения драйвера ULN2003.
Создадим переменные и функцию для устранения дребезга кнопки. Она будет устранять дребезг контактов конечного выключателя.
Инициализируем с последовательностью выводы IN1-IN3-IN2-IN4, для использования AccelStepper с шаговым двигателем 28BYJ-48.
В блоке setup() устанавливаем параметры для работы с шаговым двигателем.
Инициализируем пин входа конечного выключателя, и пин подключения от радиомодуля.
Инициализируем работу с монитором порта, и выводим «Ok!». Работу с монитором порта можно закомментировать. Я использовал вывод информации в монитор порта для отладки программы.
В основном цикле loop() получаем состояние кнопки из функции устранения дребезга. Что такое дребезг кнопки, и как с ним бороться, читайте в уроке: «Arduino: Дребезг — программное устранение. Нажатие кнопки без ложных срабатываний».
Дальше проверяем, сработал конечный выключатель, или нет.
Если конечный выключатель нажали, то перемещаем шаговый двигатель на 2000 шагов.
После чего отправляем в монитор порта информацию «On».
Если была нажата кнопка на пульте, и при этом конечный выключатель в нажатом состоянии.
То отправляем команду переместить шаговый двигатель в нулевую точку.
Отправляем в монитор порта значение «Off».
В конце цикла loop() переприсваиваем прошлому состоянию кнопки текущее состояние.
Тестирование работы замка.
Пришло время протестировать электронику замка с радиоуправлением. Для этого собираем все по схеме, которая расположена выше, и загружаем код. Тест проходит отлично. Все работает как надо. Пришло время все установить на стенд, и проверить на работоспособность, при работе в реальных условиях.
Проверяем работу замка на стенде.
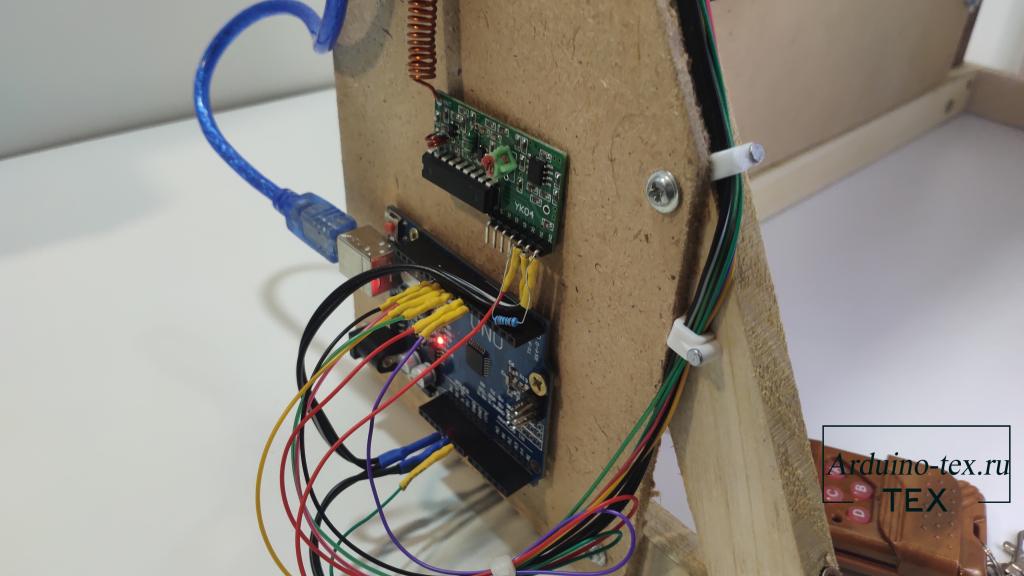
На стенде решил использовать Arduino UNO, и схема подключения будет выглядеть немного по-другому. Но пины подключения будут такие же, что и в примере с использованием Arduino NANO.
Схема подключения радиоуправления замком на Arduino UNO.
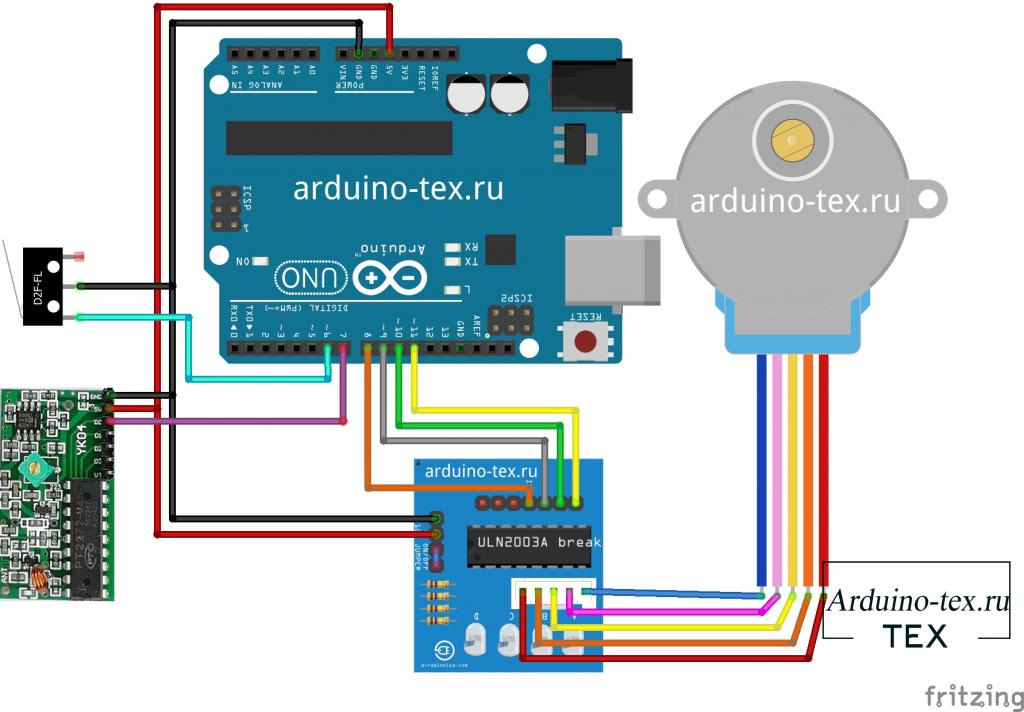
В качестве источника питания использую Powerbank 5В 1А. Пока тестировал, проверял и снимал видео, Powerbank немного разрядился, и шаговый двигатель стал пропускать шаги. Поэтому рекомендую, в качестве источника питания, использовать блок питания на 5В 1А. Можно взять зарядку от старого телефона.
Вывод.
Замок работает отлично и для того, чтобы закрывать полочку с Wi-Fi роутером от детей, или ящик с документами, также, возможно, ящик с лекарствами, будет неплохим решением. Для закрытия межкомнатной, или офисной, двери данное решение не подойдет, так как есть недоработки. А именно, нужно добавить кнопку, чтобы можно было открывать дверь изнутри, без радиопульта. А также добавить звуковую или световую сигнализацию состояния, открыта дверь, или закрыта. Поэтому будет продолжение.
Понравилс я проект Замок с радиоуправлением на Arduino? Не забудь поделиться с друзьями в соц. сетях.
А также подписаться на наш канал на YouTube, вступить в группу Вконтакте, в группу на Facebook.
Спасибо за внимание!
Технологии начинаются с простого!
Шаговый двигатель как проверить работоспособность
Использование Analyzer Q1
.jpg) Опираясь на знание принципов работы кварцевых часов, можно перейти к обсуждению методов их диагностики.
Опираясь на знание принципов работы кварцевых часов, можно перейти к обсуждению методов их диагностики.
В прошлом номере мы начали рассказывать о кварцевых часах и рассмотрели основные принципы их работы. Теперь перейдем к рассказу о методах диагностики с помощью прибора Analyzer Q1 швейцарской фирмы Witschi – универсального, многофункционального и при этом простого в использовании.

К основным возможностям прибора можно отнести измерение отклонения точности хода, сопротивления катушки двигателя, напряжения батареи, а также определение уровня прерывания импульсов шагового двигателя. Analyzer Q1 позволяет просматривать результаты измерений на дисплее, а также сохранять и распечатывать их в виде протоколов и диаграмм, передавать на компьютер. Прибор оборудован датчиком для приема акустических, емкостных и магнитных сигналов, что позволяет тестировать кварцевые механизмы часов как уже установленные в корпус, так и отдельные модули.

Рис.1. Короткий тест с помощью кварцевого сигнала
Общий подход к диагностике кварцевых часов представлен в таблице 1 и учитывает частоту возникновения тех или иных неисправностей. Прежде всего рекомендуется проверить источник питания как расходный элемент. Затем тестируется работа электронного блока – выдает ли он импульсы двигателю. Если генератор импульсов исправен, следует проверить работоспособность шагового двигателя и колесной передачи.

Рис.2. Измерение точности хода и потребляемой мощности
ПРОВЕРКА ТОЧНОСТИ ХОДА
Самой простой и быстрой процедурой является проверка отклонения хода часов, которая позволяет выяснить работоспособность электронного блока механизма. Если в механических часах данный вид диагностики основан на анализе интервалов между шумами, генерируемыми в процессе работы узла спуска, то прибор Analyzer Q1 умеет улавливать и анализировать сразу несколько принципиально разных типов сигналов: магнитное поле, создаваемое катушкой шагового двигателя, импульс тока на ее обмотке, емкостный сигнал от ЖК-дисплея (для часов с ЖК-дисплеем), электрическое поле или механические колебания кварцевого генератора.
Для проведения простейшей проверки не требуется вскрывать часы: достаточно поместить их на приемник сигнала на рабочей панели и перевести Analyzer Q1 в режим Rate and consumption test (диагностика точности хода и потребляемой мощности). После того как прибор «поймает» сигнал кварцевого резонатора, загорится светодиод quartz 32 kHz (кварц 32 кГц), а после обнаружения импульсов двигателя светодиод step motor (шаговый двигатель) начнет мигать в ритме с ними.
При этом на дисплей будут выведены расширенные параметры:
• отклонение частоты кварцевого резонатора (мелкие цифры в верхней правой части экрана);
• действительное отклонение хода часов (большие цифры в верхней левой части дисплея);
• параметры импульса двигателя: период, ширина и уровень импульса.
При этом действительное отклонение хода часов может быть меньше отклонения резонатора – многие современные механизмы имеют схему коррекции импульсов. Период коррекции (Inhibition period) может быть различен для разных механизмов, он может быть определен прибором автоматически или задан мастером на основании данных производителя.
Кварцевый генератор работает исправно, если отображенное на дисплее отклонение кварца составляет от + 0,0 до + 6 сек/день. Для действительного (скорректированного) отклонения хода часов нормой являются значения от +0,0 до 0,5 сек/день.

Рис.3. Тестирование батарей
ДИАГНОСТИКА С ВНЕШНИМ ИСТОЧНИКОМ ПИТАНИЯ
Другие возможности открываются при подаче энергии не от штатной батарейки часов, а от Analyzer Q1. В частности, в этом режиме можно провести измерение точности хода часов на основании измерения тока, протекающего через обмотку двигателя, определить потребляемую мощность, минимальное рабочее напряжение, а также сопротивление двигателя. При этом также определяются параметры импульсов двигателя: период, ширина и уровень.
Для использования этого режима часы удобно разместить на зеркальной поверхности, которая позволит видеть движение стрелок. Прибор имеет два подвижных контактных щупа, вместо которых можно использовать измерительные кабели. При проведении замеров очень важно выбрать правильное напряжение питания. Номинальное напряжение наиболее широко распространенных серебряно-оксидных батарей составляет 1,55 В, реже используются литиевые батареи с номинальным напряжением в 3 В. Analyzer Q1 позволяет регулировать подаваемое на механизм напряжение в диапазоне от 0 до 3,5 В.

ТАБЛИЦА 1. ПОРЯДОК ДИАГНОСТИКИ КВАРЦЕВЫХ ЧАСОВ
При работе от встроенного в прибор источника питания дисплей помимо данных о действительном отклонении хода часов, полученных на основе анализа скачков в потреблении тока, отображает информацию об отклонении частоты кварцевого генератора, потребляемом токе в момент прохождения импульса двигателя и потреблении тока интегральной микросхемой.
Важным параметром, характеризующим работоспособность интегральной схемы и состояние колесной передачи, является минимальное рабочее напряжение. Определить его можно и при помощи встроенного в прибор источника питания. Присоединив тоководы к механизму, следует постепенно увеличивать подаваемое напряжение с 0,5 В до номинального, наблюдая за стрелками: напряжение, при котором они придут в движение, является минимальным рабочим напряжением. Можно идти и от обратного: постепенно понижать напряжение с 1,55 В до момента, пока часы не остановятся. Значение минимального рабочего напряжения выше 1,35 В говорит о неисправности колесной передачи или ее загрязнении.

Рис.4. Тест сопротивления катушки
ТЕСТИРОВАНИЕ БАТАРЕИ
Analyzer Q1 позволяет определить состояние источника питания кварцевых часов. Напряжение современных батареек остается постоянным почти до самого конца срока службы и начинает падать, когда она полностью разрядится. Проверить источник можно путем измерения напряжения в трех режимах: без нагрузки (No Load), с низкой нагрузкой (Low Drain) и с высокой нагрузкой (High Drain).

Рис.5. Диагностика изоляции
Напряжение без нагрузки обычно измеряется при сопротивлении в 1 МОм, что приблизительно соответствует сопротивлению интегральной схемы. Для определения напряжения под слабой нагрузкой прибор автоматически включает в цепь сопротивление в 2 КОм на протяжении 10 мс каждую секунду. Это соответствует процессу, происходящему в момент подачи импульса на шаговый двигатель. Для тестирования под сильной нагрузкой после присоединения батареи к прибору необходимо нажать на кнопку «Старт»: примерно на 1 секунду к источнику питания будет подведена нагрузка в 100 Ом, что имитирует включение подсветки дис плея ЖК-часов или сигнал будильника. Измерения под высокой нагрузкой нельзя повторять несколько раз, поскольку это быстро разряжает батарею.
В таблице 2 приведены типичные значения напряжения для различных типов батарей. Тест батареи показывается только то, что батарея пока еще не разрядилась или же полностью разрядилась. К сожалению, измерить оставшуюся емкость невозможно.

Рис.6. Диагностика шагового двигателя
ПРОВЕРКА СОПРОТИВЛЕНИЯ И ИЗОЛЯЦИИ ОБМОТКИ ДВИГАТЕЛЯ
Способность встроенного в прибор источника питания подавать низкое напряжение используется для тестирования сопротивления обмотки шагового двигателя. Analyzer Q1 помогает обнаружить обрыв или короткое замыкание в обмотке шагового двигателя, нарушение изоляции между обмоткой двигателя и его сердечником или между обмоткой двигателя и платой.
Данный тест выполняется при очень низком напряжении, чтобы предотвратить поломку механизма из-за неправильного соединения контактов. Перед выполнением теста необходимо удалить из часов батарею. Для проверки исправности катушки необходимо подсоединить мобильные контактные щупы к концам ее обмотки (М) и включить режим Resistance (coil) test (тест сопротивления катушки). Полярность при этом не имеет значения. Сопротивление исправной катушки должно лежать в диапазоне от 1 до 2,5 КОм. Очень большое сопротивление говорит об обрыве обмотки, а очень низкое – о коротком замыкании.

ТАБЛИЦА 2. ТИПИЧНЫЕ ЗНАЧЕНИЯ НАПРЯЖЕНИЯ ДЛЯ РАЗЛИЧНЫХ ТИПОВ БАТАРЕЙ
Для проверки пробоя между катушкой и платой механизма один из контактов необходимо подвести к обмотке, а другой – к плате (точка Р на схеме). Нормальные значения сопротивления составляют от 700 КОм до нескольких МОм. Примерно такое же сопротивление прибор должен показать между платой (точка Р) и «минусовым» контактом батарейки (точка «–В»).

Рис.7. Правильно функционирующие часы с прерыванием импульса
ИСПОЛЬЗОВАНИЕ ГЕНЕРАТОРА СИГНАЛОВ
Помимо встроенного источника тока, Analyzer Q1 имеет и встроенный генератор импульсов. Это позволяет протестировать шаговый двигатель и механическую часть кварцевых аналоговых часов независимо от электронной схемы и ускорить поиск механических повреждений, таких как заедание стрелок, или проблем, связанных со сменой даты.
Для проверки двигателя необходимо вынуть из механизма батарейку, подсоединить щупы к концам обмотки катушки и включить на приборе генератор сигналов (Signal generator). После этого можно задать режим в соответствии со спецификой конкретного механизма.

Рис.8. Неправильно функционирующие часы с прерыванием импульса
АНАЛИЗ ДИАГРАММ ИМПУЛЬСОВ
Прибор Analyzer Q1 может записывать текущие импульсы тока шагового двигателя в виде осциллограммы. Форма импульсов предоставляет дополнительную информацию о состоянии часов – в частности, анализ диаграммы импульсов помогает обнаружить неисправности в колесной системе. Для этого можно сравнить полученные результаты с таковыми для механизма того же типа, но в хорошем состоянии. Ширина импульса и уровень прерывания отображаются в числовой форме.
В исправном механизме потребляемый ток будет увеличиваться непрерывно с момента начала импульса, достигнет максимума, затем будет некоторое время уменьшаться, а потом опять увеличиваться до самого конца импульса. Если в часах есть какие-то механические поломки, ток будет увеличиваться непрерывно с начала подачи импульса, достигнет максимума и останется таким до конца импульса. Кроме того, если часы блокированы, часто можно наблюдать асимметрию между положительными и отрицательными импульсами, так как каждый второй импульс подается с противоположной полярностью. Значительная асимметрия между положительными и отрицательными импульсами у работающих часов указывает на проблемы с шаговым двигателем.

Рис.9. Правильно функционирующие часы без импульса прерывания
ТЕСТ ЗУММЕРА
Если часы имеют устройство для подачи звукового сигнала (будильник, таймер), Analyzer Q1 позволяет протестировать и его. Для этого используется режим так называемого теста зуммера, в котором прибор генерирует биполярный тестовый сигнал с настраиваемым напряжением и фиксированной частотой в 2 КГц. Этот сигнал можно подать на зуммер и на слух проверить его исправность.
Arduino + THB6064AH + шаговый двигатель Nema 23
Чип THB6064AH можно использовать для управления шаговым двигателем Nema 23 с передачей команд управления от Arduino.
В этой статье мы рассмотрим сборку Massmind 6064, в состав которого входит чип THB6064AH и пример программы для Arduino для управления шаговым двигателем Nema 23.
Помимо компонентов, которые приведены на рисунке ниже, вам понадобится термопаста, паяльник, припой, дрель, винты и т.д. и т.п. В общем, необходимы инструменты. Все необходимые компоненты кроме самого основания платы вы можете купить на ближайшем радиорынке.


Пайка THB6064AH
Установите плату в держателе и сформируйте последовательность компонентов, которые вы будете паять. В нашем случае сначала был припаян R200s. После этого были припаяны светодиоды, два небольших резистора, два маленьких конденсатора. В общем, сначала рекомендуем припаять маленькие компоненты и постепенно паять компоненты с большими и большими габаритными размерами. На 6-ти первых фотографиях этого раздела ошибка. На них светодиод и несколько резисторов припаяны неверно, так что рекомендуем ориентироваться на последние две фотографии, на которых ошибка исправлена.
 |  |
|---|---|
 |  |
 |  |
 |  |
Установка и пайка 6064 IC
IC будет нагреваться при работе драйвера. Так что рекомендуется использовать дополнительный радиатор. Желательно установить плату на радиатор таким образом, чтобы площадь контакта была максимальной. Для фиксации платы и чипа необходимо предусмотреть отверстия в радиаторе. Возможно, надо будет установить несколько дистанционных колец, чтобы выровнять положение платы относительно чипа. Одно отверстие в радиаторе предназначено для платы и два — для IC (чипа).

IC — это последний компонент, который надо припаять на плату. Лучше паять его в самом конце, чтобы случайно не повредить при пайке других менее чувствительным к электростатике компонентов. После пайки, нанесите на чип IC термопасту с той стороны, которая будет установлена на радиатор. Теперь можете затягивать крепежные винты на плате и на чипе.
 |  |
|---|
Подключение платы и платы ramps
На плате ramps v. 1.4, которая рассматривается в данном примере, 5 контактов для установки драйверов для шагового двигателя Allegro Pololu A4988. Каждый драйвер использует 16 контактов, но для подключения к THB6064AH нам понадобится только 4 пина: Step, Dir, VDD и GND. Рекомендуем распаять небольшую плату по размерам A4988 с возможностью подключения к ней коннекторов от THB6064AH .
 |  |
|---|

Arduino управляет Nema 23 с помощью драйвера THB6064AH
Результат работы шагового двигателя Nemа 23 с управлением от Arduino и драйвером THB6064AH приведен на видео ниже:
Снизу приведен код простой программы для проверки работоспособности собранного драйвера в паре с Arduino.
int stepPin8 = 8;
int duration = 100;
// инициализируем режимы работы пинов: на вход или на выход

