Шаговый двигатель микрошаг что
CNC-DESIGN
В корзине пусто!
Микрошаг — выбор и применение
Микрошаг — это просто.
При рассмотрении принципов работы шагового двигателя мы узнали, что наиболее распространенные из них имеют 200 шагов на оборот в 360 градусов, следовательно, каждый шаг смещает вал на 1,8 градуса, что влечет за собой определенную точность позиционирования устройства. Если необходимо достичь более более высоких значений, можно разделить эти значения с помощью драйвера шагового двигателя. Они начинаются с половины шага и могут достигать 1/256 микрошагов. Это означает, что каждый из 200 отдельных шагов, встроенных в двигатель, теперь дробится драйвером 256 отдельных шагов. Это позволяет комбинированному двигателю и контроллеру останавливаться в любом из 51200 возможных положений на полный оборот.
Микрошаг не только повышает точность позиционирования.
Бытует мнение, что основное преимущество дополнительного микрошагового режима заключается в обеспечении повышенной точности позиционирования в таких приложениях, как робототехника или станки с ЧПУ. Тем не менее, существует ряд других дополнительных бонусов, которые могут быть получены с использованием микрошагов.
Первое из них включает в себя более тихую работу микрошаг сглаживает сигнал привода, поступающий в шаговый двигатель, заменяя график подачи импульса прямоугольной формы на более сглаженную (более точное разрешение). Это не чисто синусоидальная кривая, которую можно увидеть на бесщеточном электродвигателе, но похоже разницу между цифровым аудио с очень низким разрешением и цифровым аудио с более высоким разрешением.
Использование микрошага незначительно ускоряет систему.
Поскольку микрошаг является более энергоэффективным и использует меньшие, но более частые импульсы, он позволяет шаговым двигателям достигать немного более высоких скоростей, чем обычно., расплачиваться за это приходится падением крутящего момента.
Основываясь на ключевых моментах, указанных выше, можно увидеть, что наиболее подходящие приложения для микрошагов — устройства, в которых либо требуется высокая точности позиционирования, либо когда важны энергоэффективность и шум. В большинстве случаев мы рекомендуем использовать микрошаг только тогда, когда это может привести к общим улучшениям, таким как более тихая и плавная работа, но не забывать о падении крутящего момента в вашем проекте.
Микрошаг — убийца крутящего момента.
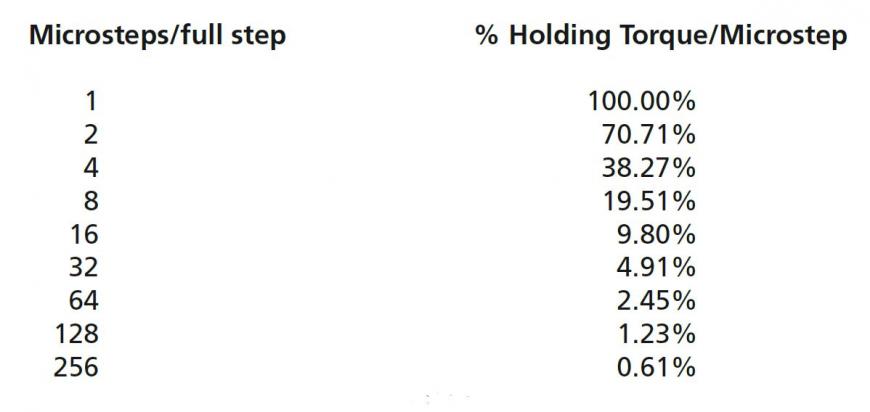
При увеличении количества микрошагов крутящий момент на микрошаг резко падает. Разрешение увеличивается, но точность позиционирования на самом деле не растет прямолинейно с увеличением микрошага. Также важно то, что любой крутящий момент нагрузки приведет к магнитному люфту, смещающему ротор из заданного положения, пока не будет создан достаточный крутящий момент.
Падение момента при увеличении микрошагов:
1 100,00%
2 70 ,71%
4 38,27%
8 19,51%
16 9,80%
32 4,91%
64 2,45%
128 1,23%
256 0,61%
Заключение
Использование микрошагов имеет преимуществав определенных моментах вашего проекта. От повышенной плавности и точности позиционирования до большей энергоэффективности и скорости, смещение резонансной частоты. Но необходимо помнить о падение крутящего момента.
Микрошаговый режим работы шагового двигателя, дробление шага
Для того, чтобы понять плюсы и минусы дробления шага (работы шагового двигателя в микрошаговом режиме), сначала стоит разобраться, что же это такое.
Микрошаговый режим – это режим, при котором происходит дробление шага большее чем 1/2 за счет получения плавно вращающегося поля статора, т.е. ток плавно снижается на одной обмотке и плавно нарастает на другой. Благодаря этому ротор шагового двигателя теоретически можно зафиксировать в любой произвольной позиции, если установить правильное отношение токов в обмотках (фазах).
Из графика видно, что увеличивая дробление шага мы дискретно приближаемся к изменению значений токов в обмотках по закону Sin, со сдвигом фаз π/2.
Теоретически, благодаря микрошаговому режиму, мы можем повысить разрешение шагового двигателя. Например, взяв двигатель с углом поворота ротора 1.8° (200 шагов на оборот), при микрошаговом режиме 1/8 получаем 800 шагов на оборот, при дроблении 1/16 – 3200 шагов на оборот и так далее. На практике же, для большинства используемых шаговых двигателей, повышение дробления шага больше 1/8 не дает ожидаемого повышения разрешения двигателя. Это происходит из-за несовершенства деталей шагового двигателя, инерции ротора, силы трения и ряда других причин.
Но, помимо увеличения разрешающей способности шагового двигателя, микрошаговый режим помогает значительно снизить вибрации и избежать резонанса на низких частотах вращения шагового двигателя, это получается благодаря меньшей длине между двумя соседними положениями ротора, что снижает влияние инерционных характеристик.
Ниже приведен результат испытаний связки шаговый двигатель + блок управления SMD 4.2 CAN в динамометрическом стенде.
Из графиков можно сделать вывод, что дробление шага отрицательно сказывается на величине максимального момента двигателя, но положительно влияет на его равномерность (особенно это видно при режиме 1/128). Так же микрошаг сильно снижает максимальное количество оборотов в минуту, которое может выдать шаговый двигатель. Это происходит из-за того, что с увеличением дробления шага, растет количество переключений напряжения, подаваемого на обмотки, что ведет к росту потерь. Поэтому в драйверах нового поколения SMD-4.2i разгон и торможение двигателя происходит в микрошаговых режимах, а при увеличении скорости драйвер автоматически понижает дробления шага в момент, когда текущее дробление не дает преимуществ над меньшим дроблением для данной частоты вращения ротора шагового двигателя.
Можно подвести итог, обозначив плюсы и минусы работы шагового двигателя в микрошаговом режиме.
Плюсы:
- повышение разрешающей способности;
- значительное снижение вибраций;
- значительное снижение шума;
- выравнивание момента;
- избегание резонанса.
Минусы:
- снижение максимальной частоты вращения ротора;
- снижение максимального момента шагового двигателя.
Василий Фортуна, Сергей Сергеев
Подпишитесь на наши новости
Получайте первыми актуальную информацию от ООО «Электропривод»
Драйверы для шаговых двигателей

Исполнение: Для 5-и фазовых двигателей, Микро шаг (250 делений)
Длит. импульса, мкс : 0.25
Частота импульса, кимп/c : 500
Шаг: 0.72
Цена, руб. с НДС: 20676.00

Исполнение: Для 5-и фазовых двигателей, Микро шаг (250 делений)
Длит. импульса, мкс : 0.25
Частота импульса, кимп/c : 500
Шаг: 0.72
Цена, руб. с НДС: 27615.00

Исполнение: Для 5-и фазовых двигателей, Микро шаг (250 делений)
Длит. импульса, мкс : 0.25
Частота импульса, кимп/c : 500
Шаг: 0.72
Цена, руб. с НДС: 37190.00

Исполнение: Для 5-и фазовых двигателей, Микро шаг (250 делений)
Длит. импульса, мкс : 0.5
Частота импульса, кимп/c : 50
Шаг: 0.72
Цена, руб. с НДС: 16375.00
Для уточнения цены, пожалуйста, свяжитесь с нами по телефону (812) 779-31-00
Драйверы для шаговых двигателей
Драйверы предназначены для контроля над шаговыми двигателями. Драйверы в свою очередь получают команды от систем управления более высокого класса – ПК, контроллера и т.д. Драйверы двух- и пятифазного шаговых двигателей, имеющие высокое разрешение и малое время отклика, являются наиболее подходящим решением для максимально эффективного управления работой двигателя.
Устройства управления (драйверы) пятифазным шаговым двигателем серии MD5 отличаются высокой разрешающей способностью, точностью управления и широким выбором моделей для любых областей применения.
Модельный ряд устройств управления пятифазным шаговым двигателем MD5 представлен следующими сериями: MD5-HF28, MD5-HF14, MD5-HD14, MD5-ND14. Каждая серия драйверов имеет свои отличительные особенности и область применения.
MD5-HF28
Устройство с универсальным питанием переменного тока для управления пятифазным шаговым двигателем. Высокое разрешение (миним. деление: 1/250 шага) и низкий уровень вибрации.
Отличительные особенности драйвера MD5-HF28
- Универсальный вход питания (100–220 В
) повышает  удобство в использовании.
удобство в использовании.
Технические характеристики драйвера MD5-HF28
- Электропитание: 100–220 В
50/60 Гц.
Применение драйвера MD5-HF28
Подходит для любых отраслей промышленности, в которых требуется высокая точность управления: роботизированное управление, позиционирование в упаковочном оборудовании, средства транспортировки полупроводников, системы визуального контроля и др.
MD5-HF14
Высокое быстродействие и большой крутящий момент.
Отличительные особенности драйвера MD5-HF14

 Универсальный вход питания (100–220 В
Универсальный вход питания (100–220 В
) повышает удобство в использовании.
Технические характеристики драйвера MD5-HF14
- Питание: 100–220 В
50/60 Гц
Применение драйвера MD5-HF14
Подходит для любых отраслей промышленности, в которых требуется высокая точность управления: роботизированное управление, позиционирование в упаковочном оборудовании, средства транспортировки полупроводников, системы визуального контроля и др.
MD5-HD14
Высокое быстродействие и большой крутящий момент.

Мифы о микрошагах или есть ли смысл делить шаг до бесконечности.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Ходит достаточно много ‘слухов’ о зависимости звуков шаговых двигателей от прошивки, легенд о микрошага и прочих сказках на ночь для репраперов.
Давайте рассмотрим факты о работе шаговиков.
Многим хочется думать,что поделив шаг на большее количество микрошагов мы получим большую точность,как следствие увеличения разрешения.
Но все несколько не так. Увеличивая дробление шага мы очень сильно понижаем крутящий момент. Уменьшая шаг — увеличиваем разрешение. Но уменьшаем точность позиционирования.
У очень немногих двигателей есть чистая синусоидальная зависимость момента от поворота оси. И у всех есть гармоники высшего порядка, искажающие кривую этой зависимости и очень сильно влияют на точность.
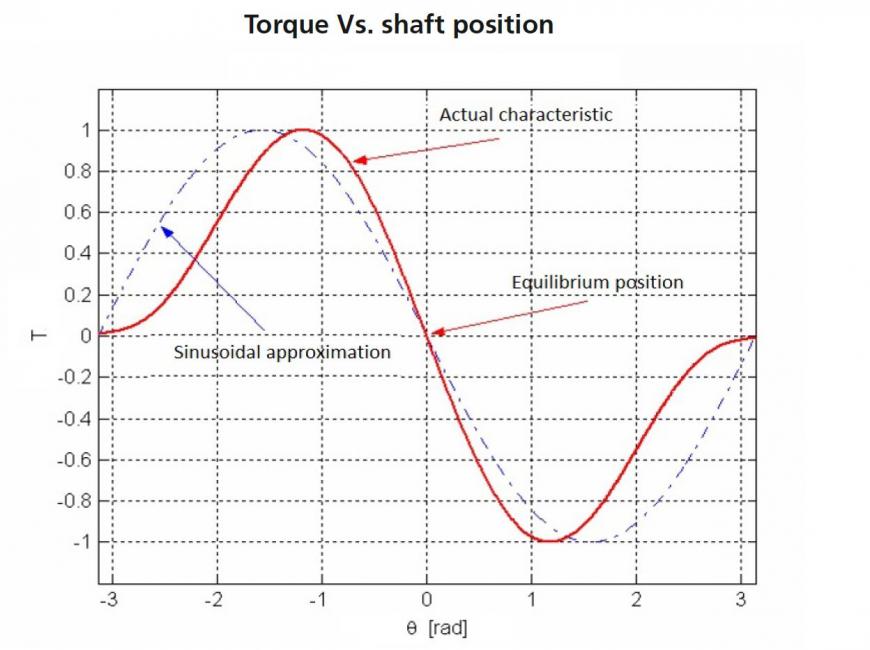
При микропередвижении на длинные дистанции действительные кривые аппроксимируются до синуса.
На графике: пунктирная линия — синус, по которому приблизительно оценивается позиционирование вала, красная линия — действительные характеристики двигателя.
Так же, важно отметить,что любая моментная нагрузка на валу создает так называемые ‘магнитные люфты’, то есть ротор будет перемещаться до того положения, пока нужный момент не будет получен. Судя по графику смещение может достигать 0,2-0,3 радиана, а это 11- 15°.
Формула для вычисления крутящего момента полного шага:
T inc = T hold × sin 90°, где
T hold — момент удержания на полном шаге;
Крутящий момент для N микрошагов:
T inc = T hold × sin ((90×N)/m, где
m- делитель микрошагов
N — число микрошагов, меньшее или равное m. То о чем писал выше,что ротор может не сделать четко полный микрошаг,а недовернуться немного, пока не получит необходимый крутящий момент.
В таблице ниже представлена зависимость между делителем шагов и соотношение момента удержания от крутящего момента.
О чем это говорит?
Что как следствие — если нагрузка на роторе,плюс трение в самом двигателе и тормозящий момент будут больше,чем крутящий момент, то точные микрошаги будут происходить до тех пор, пока суммарный момент не превысит значения нагрузки на роторе, плюс трение в двигателе и момент удержания. Иначе будет пропуск шагов.
В то же время, давая импульс на ногу драйвера совсем необязательно,что двигатель повернется. Если нужно изменить направление вращения,то на некоторое количество микрошагов ротор повернется, прежде чем изменится направление. Поэтому момент вращения должен быть постепенно уменьшен до нуля,что бы изменить направление вращения.
Точность или разрешение.
Шаговый двигатель при повороте преодолевает силу трения качения в подшипниках и это тормозящий момент (в дополнении к другим гармоническим искажениям). И для движения крутящий момент должен быть больше тормозящего. Чаще всего тормозящий момент это от 5% до 20% от момента удержания.
Некоторые компании производят двигатели с уменьшенным шагом,то есть вместо обычных 1,8°, делают 0,9°. Это делается для того,что бы приблизить кривую момент-положение ротора к синусоидальному графику и улучшить линейность графика момент-ток.
Так зачем тогда нужен микрошаг?
Есть несколько доводов почему:
1. Снижение механического шума.
2. Более плавные вращения.
3. Снижение резонансных проблем.
В сумме,микрошаг дает большее разрешение,а улучшение точности невозможно.
Реальный толк от микрошага — сокращение механических и электромагнитных помех. Сокращение резонансных проблем — лучшая синхронизация в системах без обратной связи (наш случай,мы не можем проконтролировать действительно ли вал повернулся на 2 микрошага ,или на 3. Энкодеры,к сожалению- большая редкость на принтерах).
Фактически, бесконечное увеличение микрошагов на полный шаг дадут только безщеточные двигатели с энкодером. В них скорость это функция от частоты в питании двигателей и ротор отстает от вращающегося магнитного поля,до тех пор пока вращающий момент не будет достигнут.
Поэтому использование шаговых двигателей — это только начало в развитии принтеростроения.
А нагрев драйверов DRV8825 или TMC2100 обусловлен постоянной нагрузкой в поиске того положения,где целевой момент будет получен. И это для каждого микрошага. Больше шагов — больше нагрузка, больше нагрев. Ну и увеличивая разрешение,мы теряем в мощности. Думаю,что дискуссия на эту тему будет полезна.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.