Драйвер шагового двигателя A4988 с радиатором
Драйвер шагового двигателя A4988 с радиатором









Описание товара
Драйвер шагового двигателя A4988 — простой и доступный способ управления шаговыми двигателями, может использоваться в маломощных станках ЧПУ, 3D принтерах и других устройствах с применением шаговых двигателей.
Параметры драйвера:
- Напряжения питания шаговых двигателей: 8. 35 вольт постоянного тока
- Дробление шага: в 1, 1/2, 1/4, 1/8, 1/16 раз
- Протокол управления: STEP/DIR
- Напряжение питания логики микросхемы: 3. 5.5 вольт постоянного тока
- Защита от
- перегрева
- перегрузки по току
- пониженного напряжения
- короткого замыкания на землю
- короткого замыкания обмоток двигателя
- Максимальный ток на фазу: до 1 ампер без радиатора, до 2 ампер с радиатором
- Интеллектуальное управление режимом затухания тока
- Габариты модуля: 20*15*10 мм
- Габариты радиатора: 9*5*9 мм
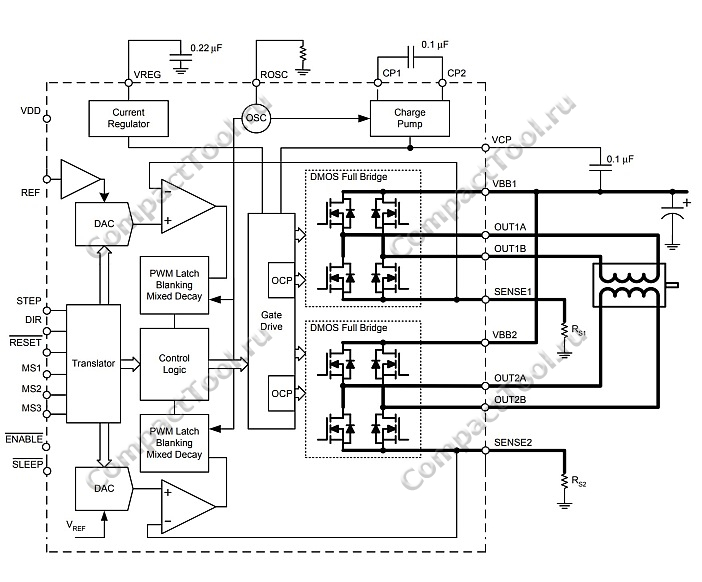
В основе драйвера шагового двигателя — специализированная микросхема А4988, которая включает в себя транслятор интерфеса STEP/DIR , калькулятор микрошага, схему огрнаичения тока, два Н-моста из полевых транзисторов в защитными диодами и драйверы для них.
Диаграма А4988:
 |
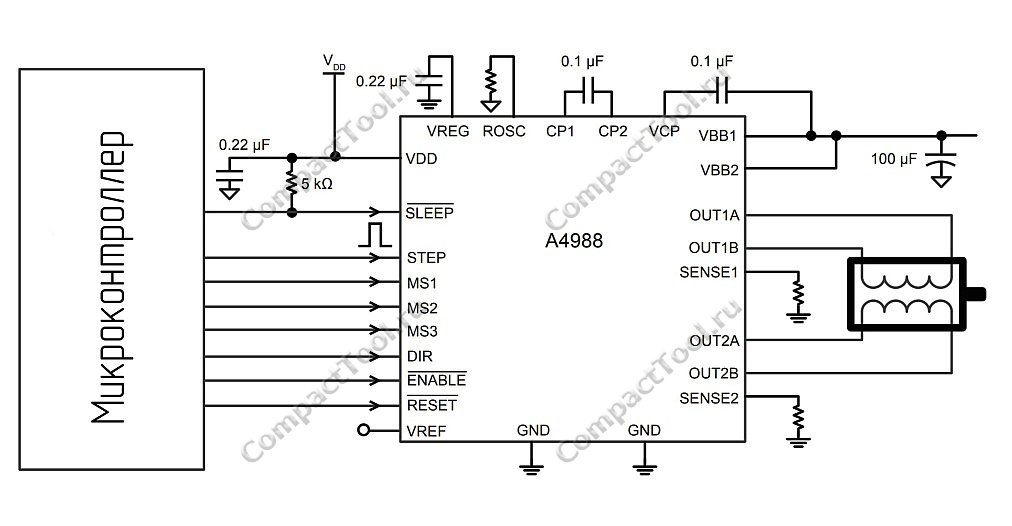
Рекомендуемая даташитом схема подключения микросхемы А4988:
 |
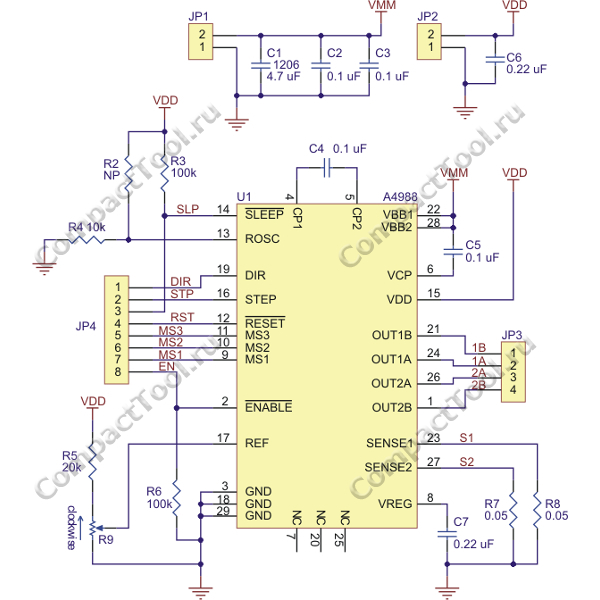
Реальная принципиальная схема драйвера А4988:
 |
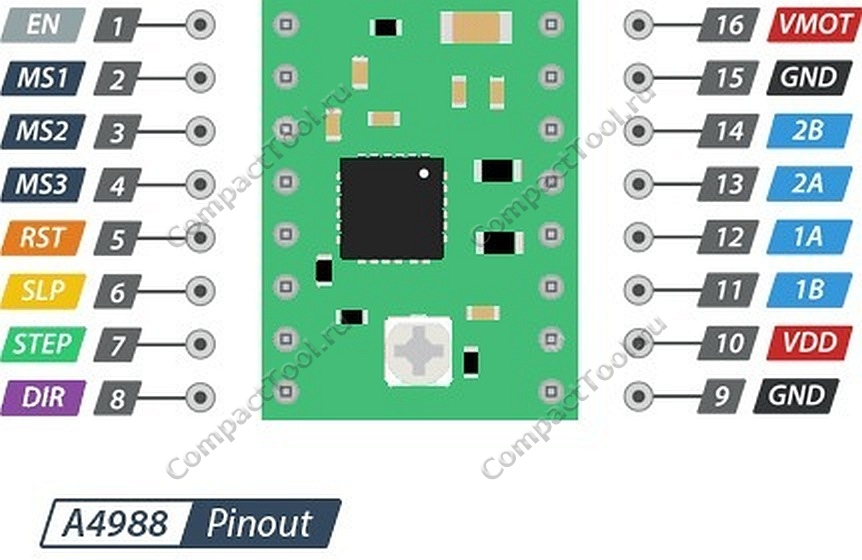
Расположение выводов:
 |
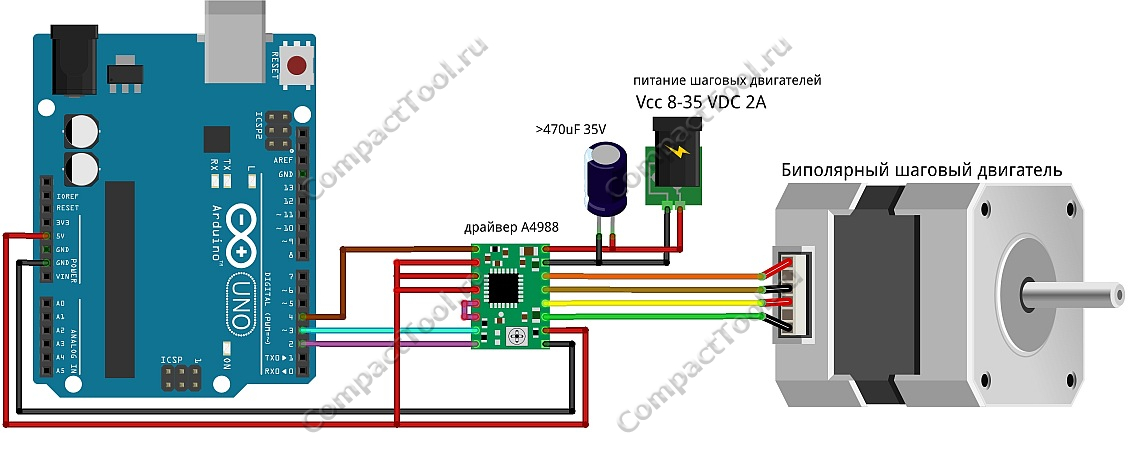
Подключение драйвера (на примере использования ШД NEMA17 и Arduino Uno в качестве управляющего микроконтроллера):
 |
Чтобы использовать драйвер необходимо выполнить следующие действия:
1. Подключить шаговый двигатель.
Подключение шагового двигателя производится напрямую к выводом драйвера 1A-1B и 2A-2B. Стоит отметить, что драйвер предназначен для подключения биполярных шаговых двигателей, имеющих две обмотки. Но этот драйвер также можно использовать и с униполярными двигателями. Как подключить униполярные двигатели к биполярному шаговому двигателю читайте в статье на нашем сайте.
2. Подать питание.
Драйвер требует двойного питания: 3-5 вольт для работы логической части микросхемы (выводы Vdd и GND) и 8-35 вольт (в зависимости от используемого шагового двигателя) для силовой части (выводы Vmot и GND). На примере выше питание логической части осуществляется от платы Arduino Uno и составляет 5 вольт. Питание силовой части рекомендуется осуществлять от отдельного блока питания. Кроме того, рекомендуется устанавливать электролитический конденсатор в цепи питания силовой части, емкостью не менее 470 микрафарад и рабочим напряжением выше напряжения питания силовой части.
3. Установить режим микрошага.
Современные шаговые двигатели позволяют управлять углом поворота оси с достаточно большой точностью. Например, шаговый двигатель типоразмера NEMA17 имеет показатель в 200 шагов на оборот вала двигателя, что соответствует минимальному углу 1.8 градуса. Для некоторых задач такой точности может оказаться недостаточно. Более того, сейчас ещё можно встретить устаревшие шаговые двигатели (как правило униполярные, применявшиеся в матричных принтерах), которые имеют всего 48 шагов на оборот (7.5 градусов на шаг). К тому же шаговый двигатель между этими фиксированными положениями перемещается рывками. Для увеличения точности позиционирования и уменьшения рывков при перемещении используют функцию микрошага — разбиение одного шага на несколько частей. Драйвет А4988 способен делить шаги двигателя в 2, 4, 8 или 16 раз, что позволяет получить до 16 раз более точное позиционирование угла поворота (0.1125 градуса при делении на 16) и сгладить рывки перемещения. Для установки микрошага используются выводы MS1-3. Эти выводы подтянуты к «земле» встроенными в драйвер резисторами и по умолчанию принимают значение логического нуля. Для активации дробления шага необходимо подключить выводы MS1-3 к положительному полюсу питания логической части (3-5 вольт). Для вычисления величины деления микрошага используется следующая таблица:
На примере подключения выше все конфигурационные выводы подтянуты к положительному полюсу питания логической части, что дает дробление шага в 16 раз. При включении дробления шага сигнал на выходе силовой части драйвера принимает форму ступенчатой синусоиды (изображена зеленым цветом), пример на изображении ниже. Сигнал на входе STEP изображен в нижней части осциллограммы синим цветом и представляет собой прямоугольные импульсы. Данная осциллограмма отлично иллюстрирует функцию дробления шага драйверами шагового мотора.
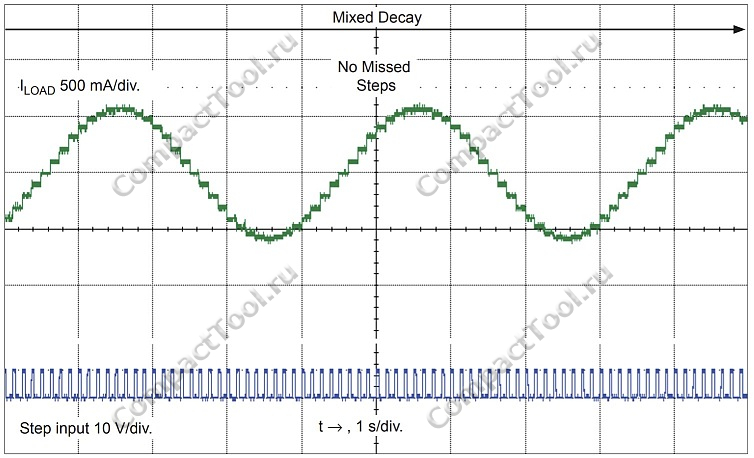 |
Более подробные осциллограммы для каждого режима дробления шага приведены на страницах 14-16 даташита на микросхему А4988.
4. Установить конфигурацию работы драйвера.
Кроме входов MS1-3 драйвер А4988 имеет три входа конфигурации, которые управляют питанием драйвера:
- SLEEP — подача низкого логического уровня переводит микросхему драйвера в спящий режим, подача высокого логического уровня выводит драйвер из спящего режима. Но на самом деле подача высокого логического уровня не нужна,так-как вывод SLEEP подтянут к положительному полюсу логической части питания драйвера через внутренний резистор.
- RESET — подача низкого логического уровня сбрасывает логику микросхемы (транслятор) в предопределенное состояние. Также, пока на выводе RESET присутствует логическая единица драйвер игнорирует все входящщие сигналы управления. Зачастую вход RESET не используют для сброса транслятора и соединяют его с выводом SLEEP на котором присутствует логическая 1, что и изображено на вышепреведенной схеме подключения.
- ENABLE — вход включения драйвера, активируется логическим 0 (присутствует по умолчанию), логическая 1 запрещает работу драйвера. Данный вывод можно не использовать, так как встроенный подтягивающий резистор всегда разрешает работу драйвера, тем не менее в ЧПУ станках и 3D принтерах данный вывод активно используется для разблокировки шаговых двигателей для ручного перемещения без обесточивания всего станка, либо для снижения энергопотребления.
5. Настроить ограничение силы тока шаговых двигателей.
Важно ограничить силу тока, протекающего через обмотки шагового двигателя. Для этого на плате драйвера предусмотрен подстроечный резистор, который задает опорное напряжение на выводе 17 микросхемы А4988. Далее, микросхема A4988 на основе опорного напряжения и данных, полученных по каналам обратной связи, ограничивает силу тока на обмотках шагового двигателя.
Правильно установить силу тока нам поможет даташит, который предлагает формулу для расчета тока: ITripMAX = Vref / ( 8 * Rs), где Vref — напряжение на входе 17 микросхемы драйвера, Rs — номинал резисторов R7 и R8 (см. принципиальную схему драйвера), которые могут иметь номинал 0,1 или 0,05 Ом. Необходимую силу тока можно получить из даташита на шаговый двигатель, номинал сопротивления Rs также известен, поэтому формула приобретает вид Vref = ITripMAX * 8 * Rs
Для примера я приведу расчет опорного напряжения для шагового двигателя NEMA 17 OK42STH33-1334A, который имеет номинальный ток 1.33A. Сопротивления Rs в моем случае имеют номинал 0,1 Ом, поэтому опорное напряжение равно 1,33*0,1*8= 1,064 вольт. Но в таком случае шаговый двигатель будет работать не пределе своих возможностей, поэтому рекомендуется ограничить ток 70% от максимального, а это значит, что полученное опорное напряжение необходимо умножить на 0.7, и в итоге я получаю 1,064*0,7 = 0,7448 вольт.
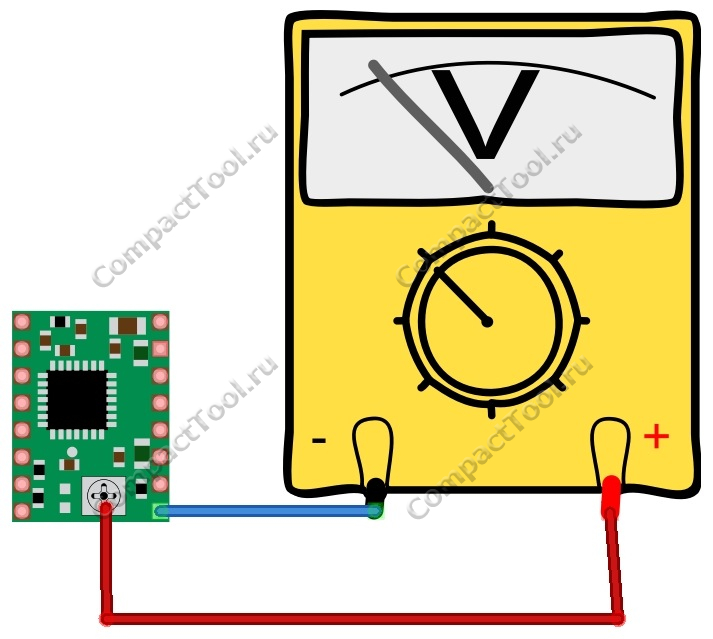
Чтобы измерить опорное напряжение, необходимо измерить напряжение между выводом GND и центральной частью подстроечного резистора, при необходимости подстраивая резистор в определенное положение.
Работа без радиатора допустима при токе не более 1 ампера, но в любом случае мы рекомендуем использовать радиатор, поставляющийся в комплекте с драйвером, а при необходимости использовать активное воздушное охлаждение.
 |
6. Подать управляющие сигналы.
Управление мотором осуществляется по протоколу STEP/DIR, сигналы которого подаются на одноименные выводы драйвера.
- DIR (direction) — задает направление вращения шагового двигателя. Направление вращения зависит не только от значения на входе DIR, но и от полярности подключения обмоток шагового двигателя. Если шаговый двигатель вращается не в ту сторону, то можно изменить значение на входе DIR, либо поменять местами выводы одной из обмоток шагового двигателя.
- STEP — импульс шага, представляет собой прямоугольные импульсы. Один импульс шага поварачивает вал шагового двигателя на определенный угол, например, для двигателей типоразмера Nema17 на 1.8 градусов при отключенном дроблении шага. При включенном дроблении шага угол поворота на один шаг уменьшается пропорционально значению дробления шага.
Стоит отметить, что напряжение импульсов STEP/DIR не должно превышать 5,5 вольт. Источниками управляющих импульсов могут служить как микроконтроллеры, так и простые генераторы прямоугольных импульсов, например, мультивибраторы.
В случае использования драйвера А4988 со специализированными платами для управления станками ЧПУ и 3D принтерами из всех вышеперечисленных шагов подключения драйвера необходимо только осуществить настройку силы тока, так-как остальные нюансы подключения шагового двигателя учтены при проектировании печатной платы.
Nema 17: все о шаговом двигателе, совместимом с Arduino

Мы уже проанализировали все о шаговые двигатели который вы можете использовать в своих проектах Arduino, но есть один из этих двигателей, который выделяется среди остальных моделей, таких как Nema 17, поскольку это очень точный двигатель с несколькими приложениями, в том числе с заменой поврежденного двигателя некоторые принтеры 3Д.
С помощью этого шагового двигателя вы сможете очень точно контролировать вращение его оси, чтобы делать точные движения и таким образом контролировать движение вашей машины или робота. И в этом руководстве вы можете получить всю необходимую информацию, чтобы познакомиться с ним поближе и начать с ним работать.
Технические характеристики Nema 17
Шаговый двигатель Nema 17 — биполярного типа, с углом шага 1,8 °, то есть он может делить каждый оборот или поворот на 200 шагов. Каждая внутренняя обмотка поддерживает ток 1.2 А при напряжении 4 В, что позволяет развивать значительную силу в 3.2 кг / см.
Также этот двигатель Nema 17 надеженВот почему он используется в таких приложениях, как домашние 3D-принтеры и другие роботы, которые должны иметь значительную согласованность. Примером принтеров, использующих этот механизм в качестве основы для своих движений, является Prusa. Он также используется в лазерных резаках, станках с ЧПУ, станках для захвата и размещения и т. Д.
Однако не все чудеса и преимущества в этом двигателе, так как он Более могущественный что надежный, следовательно, не так уж и сбалансирован в этом смысле .
Коротко, технические характеристики являются:
- Шаговый двигатель.
- Модель NEMA 17
- Вес 350 грамм
- Размер 42.3×48 мм без вала
- Диаметр вала 5 мм D
- Длина вала 25 мм
- 200 шагов на оборот (1,8º / шаг)
- Ток 1.2 А на обмотку
- Напряжение питания 4В
- Сопротивление 3.3 Ом на катушку
- 3.2 кг / см крутящий момент двигателя
- Индуктивность 2.8 мГн на катушку
Распиновка и таблица данных

El распиновка этих шаговых двигателей Это довольно просто, поскольку у них не слишком много кабелей для подключения, у них также есть разъем, чтобы вам было легче их подключать. В случае NEMA 17 вы найдете распиновку, подобную той, которую вы видите на изображении выше.
Но если вам нужно узнать больше технических и электрических деталей о пределах и диапазонах, в которых может работать NEMA 17, вы можете поиск по таблице шагового двигателя и, таким образом, получите всю необходимую дополнительную информацию. Здесь вы можете скачать PDF с примером.
Где купить и цена
Ты можешь найти по низкой цене в различных специализированных магазинах электроники, а также в интернет-магазинах. Например, он у вас есть на Amazon. Бывают они от разных производителей и в разных форматах продаж, например, в упаковках по 3 и более единиц, если вам нужно несколько для мобильного робота и т. Д. Вот несколько отличных предложений:
Пример того, как начать работу с Nema 17 и Arduino

Простой пример, чтобы начать использовать это шаговый двигатель NEMA 17 С Arduino вы можете собрать эту простую схему. Я использовал драйвер для двигателей DRV8825, но вы можете использовать другой и даже другой шаговый двигатель, если хотите изменить проект и адаптировать его к своим потребностям. То же самое происходит с кодом скетча, который вы можете изменить по своему усмотрению .
В случае используемого драйвера он выдерживает напряжение 45 В и 2 А, поэтому идеально подходит для шаговых двигателей или шаговых двигателей малого и среднего размера, таких как биполярный NEMA 17. Но если вам нужно что-то «тяжелее», мотор побольше, например NEMA 23, то вы можете использовать драйвер TB6600.
Помните, что вы также можете использовать библиотеку AccelStepper для лучшей управляемости. Библиотека, написанная Майком Макколи, очень практичная для ваших проектов, с поддержкой ускорения и замедления, что является большим преимуществом для множества функций.
Лас- связи суммированы следующие:
- Двигатель NEMA 17 имеет соединения GND и VMOT с источником питания. Который на изображении появляется с компонентом с нарисованным лучом и конденсатором. Источник должен иметь напряжение от 8 до 45 В, а добавленный конденсатор, который я добавил, может быть 100 мкФ.
- Две катушки шагового двигателя подключены к A1, A2 и B1, B2 соответственно.
- Вывод GND дайвера подключен к GND Arduino.
- Вывод VDD драйвера подключен к 5 В Arduino.
- STP и DIR для шага и направления подключены к цифровым контактам 3 и 2 соответственно. Если вы хотите выбрать другие выводы Arduino, вам просто нужно соответствующим образом изменить код.
- RST и SLP для сброса и сна драйвера должны быть подключены к 5v платы Arduino.
- EN или активационный контакт могут быть отключены, так как в этом случае драйвер будет активен. Если он установлен на HIGH вместо LOW, драйвер отключен.
- Остальные контакты будут отключены .
Относительно код эскизаЭто может быть так просто, чтобы заставить NEMA 17 работать и приступить к работе, каламбур .
больше информации, вы можете проконсультироваться с курсом программирования с Arduino IDE пользователя Hwlibre.
Содержание статьи соответствует нашим принципам редакционная этика. Чтобы сообщить об ошибке, нажмите здесь.
Полный путь к статье: Бесплатное оборудование » Электронные компоненты » Nema 17: все о шаговом двигателе, совместимом с Arduino
L298N подключение к Ардуино
Нет так давно мы рассматривали алгоритм сборки ЧПУ своими руками, где затрагивалась тема управления шаговыми двигателями, ведь именно они позволяют просто и точно спозиционировать фрезу в заданной точке.
Конечно, шаговые двигатели (ШД) используются не только в ЧПУ и 3D-принтерах, им есть масса и других применений. Например, вкупе с популярным «конструктором для взрослых», Arduino, на базе которого можно создать всё что угодно. Однако, связка «Ардуино – шаговый двигатель» требует дополнительный элемент – драйвер.
Из-за того, что двигатель требует повышенного напряжения и силы тока, непосредственное подключение его к микроконтроллеру невозможно, напряжения логического нуля в +5В и силы тока в 40 мА не хватит для работы любого шагового двигателя. Функцию усилителя/переключателя берет на себя драйвер.
О нём мы и поговорим подробнее ниже.
Модуль L298N выполняет роль Н-моста (напряжение, прикладываемое к двигателю постоянного тока, может менять полярность для того, чтобы изменить направление вращения в противоположную сторону) и универсального драйвера для независимого управления сразу двумя двигателями постоянного тока или для одного шагового двигателя.
Модуль собирается на основе одноименной микросхемы (L298N).
К L298N можно подключить двигатели, питающиеся напряжением от 5 до 35 вольт. Управление может быть реализовано в активном или пассивном режимах.
1. Активный – доступно не просто включение и отключение вращения мотора, но и управление его скоростью.
2. Пассивный – контроллер будет понимать только логику «включить/выключить двигатель». Управление уровнем выходного напряжения будет недоступно.
L298N – это облегчённая версия платы L293D. По сравнению с последней на L298N отсутствуют защитные диоды (их можно установить самостоятельно при необходимости защиты от скачков тока в процессе пуска двигателей).
Чтобы логика управления была понятнее, сначала разберёмся с джамперами и клеммами на плате.
Рис. 1. Джамперы и клеммы на плате
К клеммникам 1 и 2 подключаются двигатели, логика подключения зависит от моделей двигателей и логики их работы.
Блок клемм 3 отвечает за подключение питания двигателей. Первый контакт — +12. На него подаётся питание от 5 до 12 вольт, если джампер 3 одет, и от 12 до 35 воль, если джампер 3 снят.
При питании до +12В встроенный стабилизатор сам генерирует питание для логической части схемы, поэтому контакт +5В можно не использовать.
Если джампер 3 снят, то контакт +5В требуется запитать отдельно.
Управляющие сигналы от Ардуино или с другого микроконтроллера должны подаваться на контакты IN1-IN4, ENA, ENB. В зависимости от логических уровней и конфигурации джамперов 1,2 будет подаваться питание на двигатели/двигатель.
Джамперы 1 и 2 отвечают за переключение между активным и пассивным режимами работы драйвера. Если джампер одет, то реализуется логика «пассивного» управления.
Теперь для наглядности рассмотрим пару реальных схем подключения.
Управление двумя двигателями постоянного тока
Схема соединения будет выглядеть следующим образом.
Рис. 2. Схема соединения
Напряжение питания двигателей ниже 12 вольт, значит джампер 3 установлен, джамперы 1 и 2 на контактах ENA и ENB сняты.
Стоит особое внимание уделить пинам на Ардуино с ШИМ-модуляцией (рядом с цифровым значением есть специальный символ «
«). Они необходимы для управления скоростью вращения вала (чем выше уровень напряжения, тем выше скорость).
Теперь о логике, на примере левого двигателя (см. изображение выше).
Digitrode
цифровая электроника вычислительная техника встраиваемые системы
- Вычислительная техника
- Микроконтроллеры микропроцессоры
- ПЛИС
- Мини-ПК
- Силовая электроника
- Датчики
- Интерфейсы
- Теория
- Программирование
- ТАУ и ЦОС
- Перспективные технологии
- 3D печать
- Робототехника
- Искусственный интеллект
- Криптовалюты
Чтение RSS
Управляем шаговым двигателем с помощью Arduino и драйвера DRV8825
Шаговый двигатель – это тип двигателя постоянного тока, который работает дискретно и используется повсеместно, от камеры наблюдения до сложных роботов и машин. Шаговый двигатель NEMA 17 имеет угол шага 1,8°, что означает, что для поворота на 360 ° потребуется 200 шагов. Изменяя скорость подачи управляющего сигнала, мы можем легко контролировать скорость двигателя. Шаговый двигатель может работать в различных пошаговых режимах, таких как полный шаг, полшага, ¼ шаг путем применения соответствующих логических уровней к контактам шагового модуля. В нашем предыдущем проекте мы контролировали шаговый двигатель 28-BYJ48 с помощью Arduino. 28-BYJ48 имеет относительно более низкий крутящий момент, чем другие шаговые двигатели, такие как NEMA 14, NEMA17.

В этом проекте мы собираемся управлять шаговым двигателем NEMA 17 с помощью Arduino и шагового модуля DRV8825. Мы также будем использовать потенциометр для управления направлением шагового двигателя, чтобы вращать его по часовой стрелке и против часовой стрелки.
Модуль шагового привода или драйвер контролирует работу шагового двигателя. Драйверы шагового двигателя посылают ток на шаговый двигатель через различные фазы. DRV8825 – это модуль микрошагового драйвера, аналогичный модулю A4988. Используется для управления биполярными шаговыми двигателями. Этот модуль управления шаговым двигателем Nema 17 имеет встроенный транслятор, который означает, что он может управлять как скоростью, так и направлением биполярного шагового двигателя, такого как NEMA 17, используя только два контакта, то есть STEP и DIR. Вывод STEP используется для управления шагами, а вывод DIR – для управления направлением вращения.

Драйвер двигателя Nema 17 DRV8825 имеет максимальную выходную мощность 45 В и ± 2,2А. Этот драйвер может управлять шаговым двигателем в шести различных пошаговых режимах, то есть с полным шагом, полушагом, четвертьшагом, одной восьмой шага, одной шестнадцатой шага и одной тридцать второй шага. Вы можете изменить разрешение шага, используя линии микрошага (M0, M1 и M2). Установив соответствующие логические уровни для этих контактов, мы можем установить двигатели на одно из шести шагов разрешения.
Схема подключения шагового двигателя NEMA 17, Arduino, DRV8825 и сопутствующих компонентов приведена на следующем изображении.

Питание шагового двигателя осуществляется от источника питания 12 В, а модуль DRV8825 получает питание от Arduino. Контакты RST и SLEEP оба подключены к 5V от Arduino, чтобы драйвер оставался включенным. Потенциометр подключен к выводу A0 Arduino; он используется для управления направлением двигателя. Если вы поворачиваете потенциометр по часовой стрелке, то шаговый двигатель будет вращаться по часовой стрелке, а если вы поворачиваете потенциометр против часовой стрелки, то он будет вращаться против часовой стрелки. Конденсатор 47 мкФ используется для защиты платы от скачков напряжения. Выводы M0, M1 и M2 оставлены отсоединенными, это означает, что драйвер будет работать в режиме полного шага.

Перед использованием двигателя измените ограничение тока модуля DRV8825 на 350 мА с помощью потенциометра ограничения тока. Вы можете измерить текущий предел с помощью мультиметра. Измерьте ток между двумя точками заземления и потенциометром и отрегулируйте его до требуемого значения.

Полный код для управления Nema 17 с помощью Arduino приведен далее.