
Как подобрать шаговый двигатель для станка ЧПУ
Как подобрать шаговый двигатель для станка ЧПУ. ШД из принтера.

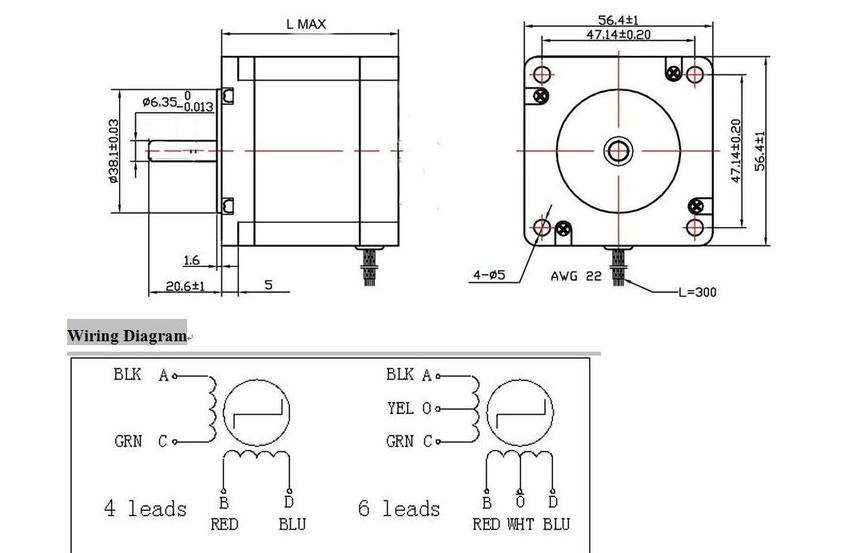
Любая разработка начинается с выбора компонентов. При разработке ЧПУ станка очень важно правильно подобрать шаговые двигателя . Если у вас есть деньги на покупку новых двигателей, в таком случае нужно определить рабочее напряжения и мощность двигателя. Я купил себе для второго ЧПУ станка шаговые двигателя вот такие: Nema17 1.7 А.
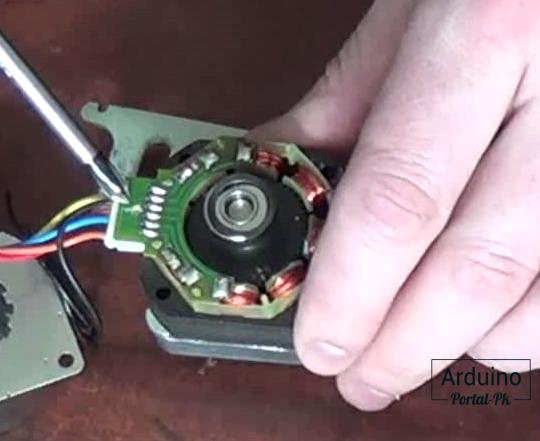
Если у вас нет достаточно денег или вы просто пробуете свои силы в данной сфере. То вы скорее всего будите использовать двигателя из принтеров . Это самый недорогой вариант. Но тут Вы столкнетесь с рядом проблем. У двигателя может быть 4, 5, 6, 8 — проводов для подключения. Как их подключить к драйверам L298n и СNC shield.
Давайте разберемся по порядку. Какие шаговые двигателя бывают. Если вы видите четное количество выводов это биполярный шаговый двигатель . Расположение обмотки для данного двигателя вот такое.
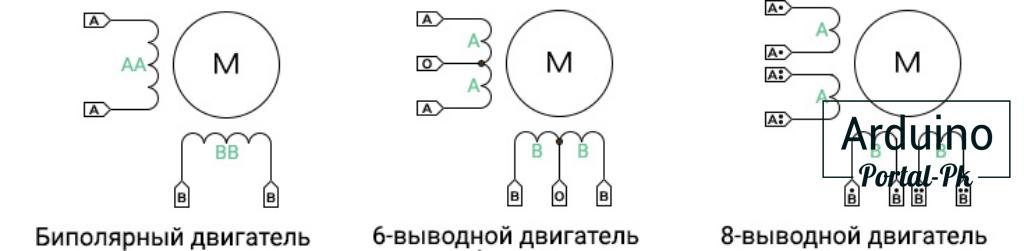
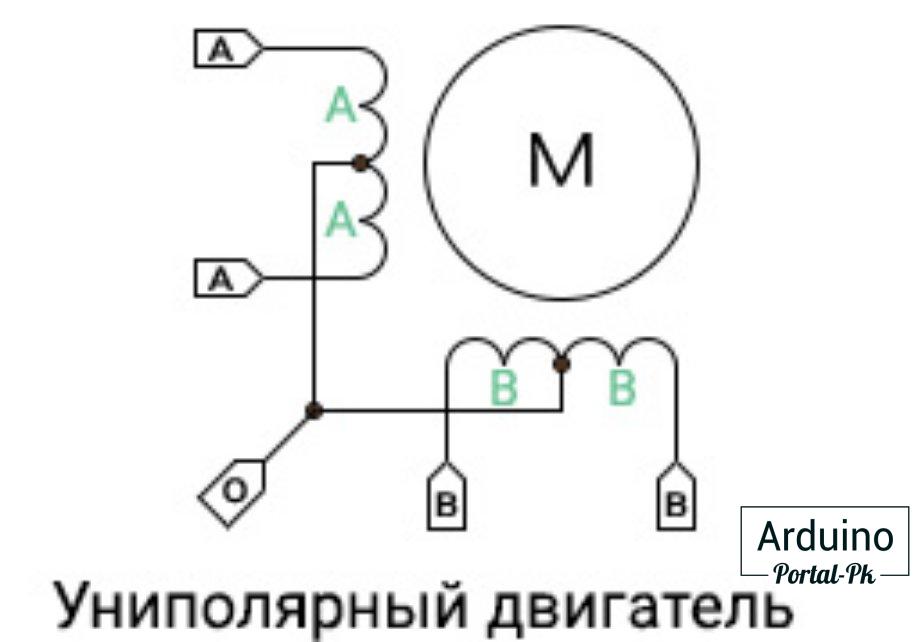
Если у двигателя 5 выводов, это униполярный шаговый двигатель . Вот так выгладит его схема.
Наши драйвера рассчитаны на двигателя с 4 выводами . Как быть? Как их подключить?
Биполярные ШД с 6-ю выводами подключаются к драйверу двумя способами:
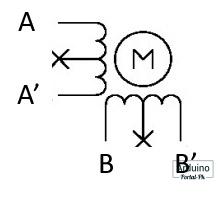
В данном случае ШД имеет момент в 1.4 раза больше. Момент более стабилен на низких частотах.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток — 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R — именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность ШД — I*2 * R
При последовательном включении обмоток потребляемая мощность становится Iпосл.*2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому I*2 * R = Iпосл.*2 * 2* R, откуда
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
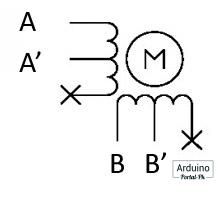
Во втором случае момент более стабилен на высоких частотах. Параметры ШД при таком подключении соответствуют заявленным в datasheet, (момент, ток), момент более стабилен на высоких частотах .
Униполярный шаговый двигатель можно переделать.
Для этого нужно разобрать шаговый двигатель и перерезать провод соединяющий центр обмоток. И при подключении общий провод подключать ни куда не нужно.
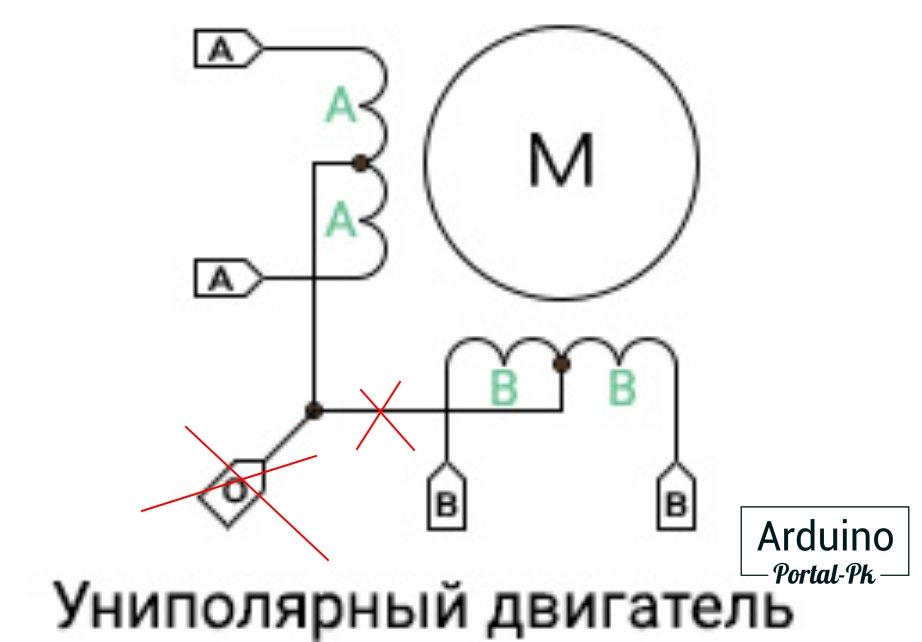
В итоге у нас получается биполярный двигатель с 4 выводами.
Шаговые двигателя с 8-ю выводами можно подключить тремя способами.
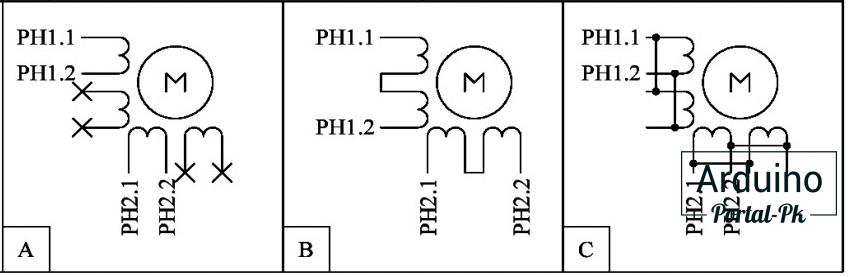
Подключение А — шаговик работает с характеристиками, заявленными в описании (момент, ток), момент более стабилен на высоких частотах.
Подключение B – момент ↑1.4 раза, момент более стабилен на низких частотах (относительно А).
Подключение C – момент ↑1.96 раза, момент более стабилен на высоких частотах (относительно А).
Вот мы и решили проблему подключения шаговых двигателей. Но не все двигателя у нас заработают. Нужно еще определить рабочее напряжение двигателей. Самый правильный способ это найти datasheet. Так все параметры есть. Но не ко все двигателя из принтера можно найти datasheet. В таких случаях я пользуюсь вот такой таблицой .
Сопротивление обмотки, Ом
Рабочее напряжение, В
Не знаю на сколько данная таблица верная но у меня все сходиться и работает как надо.
Двигателя я выбираю чтобы рабочее напряжение было меньше или равно напряжению источника питания. Для двигателей рассчитанных на меньшее напряжения необходимо настроить ток ниже.
Настраивать СNC shield будем в следующей статье. Не пропустите!
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
Спасибо за внимание!
Понравилась статья? Поделитесь ею с друзьями:
Эксперимент с шаговым двигателем Mitsumi от лазерного принтера.
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Как-то раз достался мне (абсолютно безвозмездно) хладный труп лазерного принтера.
Принтер был разобран на органы, ценного и полезного для rep-rap-а в нем ничего не нашлось, кроме пожалуй шагового двигателя Mitsumi M49SP-1. Польза в котором сомнительная.

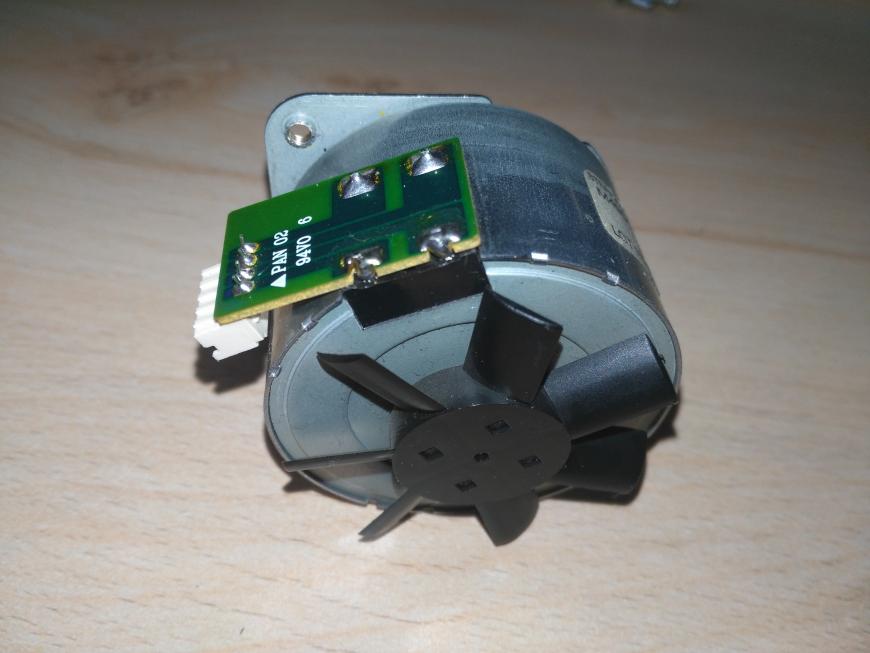
Погуглил, двигатель вроде достаточно мощный. Один весомый минус — шаг в 7,5 градусов.
После раздумий куда его применить, пришла в голову мысль попробовать его в качестве привода экструдера принтера. В качестве эксперимента. Нормальные, обычные Nema17 шаговики у меня есть в некотором количестве,

но вот захотелось поэкспериментировать. Стало интересно, мысль овладела головой и руками.
Еще подумалось что микрошаг 32 ситуацию с шагом в 7,5 градусов слегка улучшит.
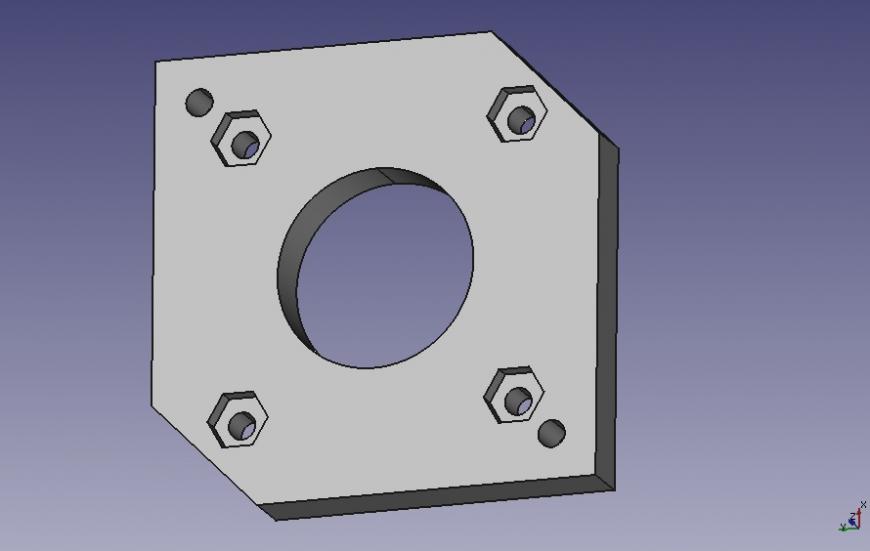
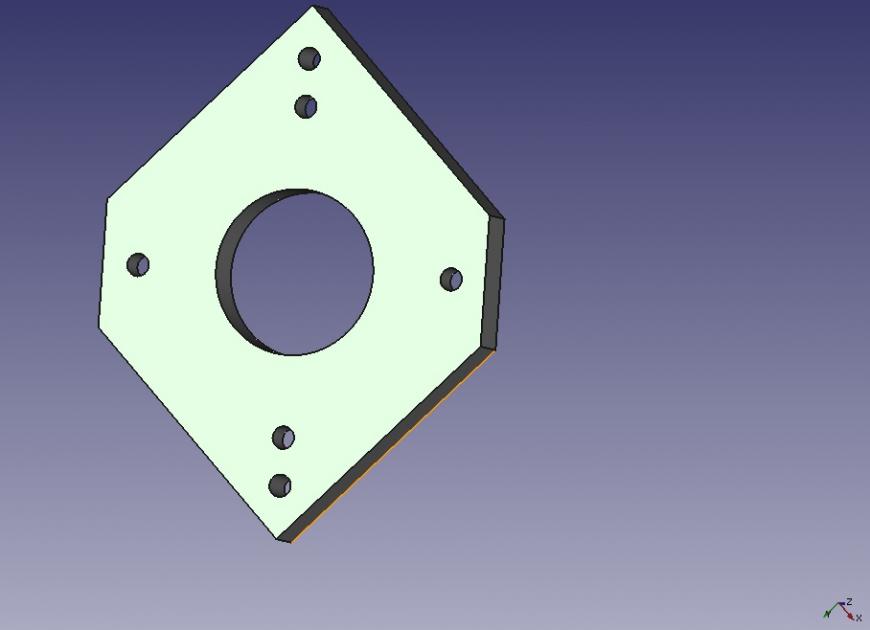
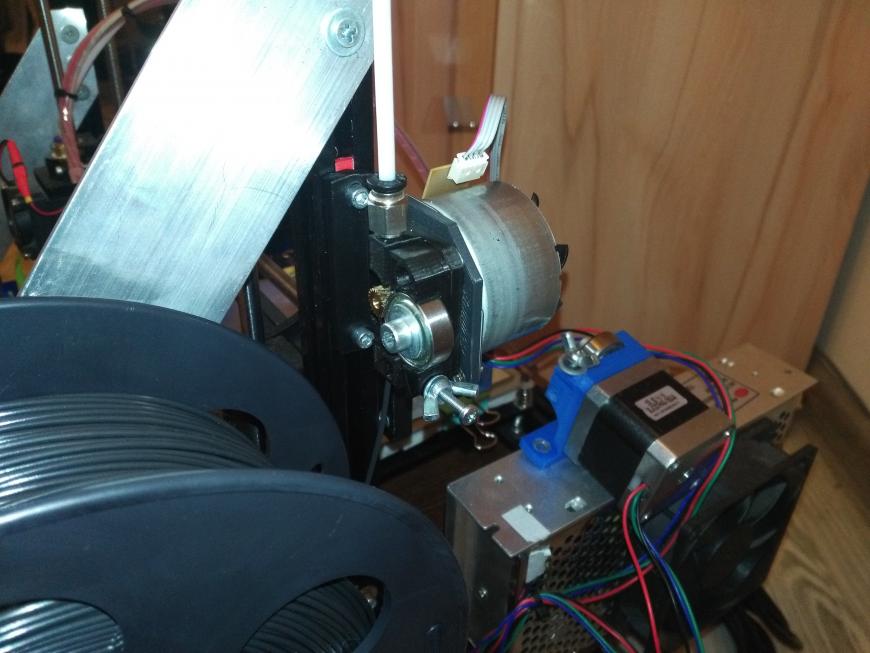
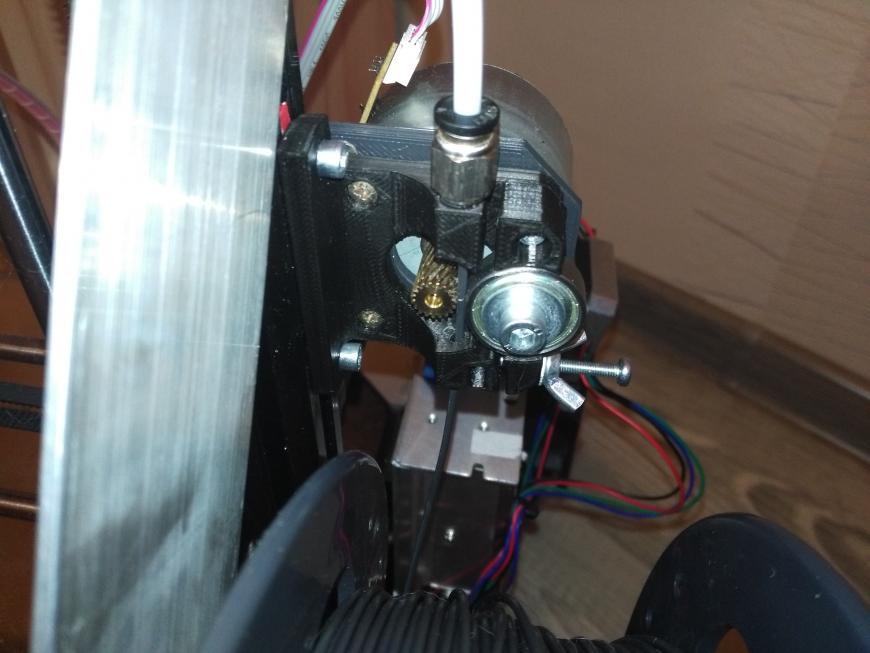
Спроектировал во FreeCAD-е и распечатал переходную пластину с закладными гайками м3 с этого мотора на nema17.


Родную шестерню не удалял, зубчики достаточно острые и по идее должны вполне цепляться за пруток.
Распечатанный экструдер у меня уже был, печатал остатками китайского пла.

С моим принтером пришел такой же, только литой. А модельку случайно нашел на тинге и распечатал в некотором количестве.
Собрал монстр-экструдер воедино.


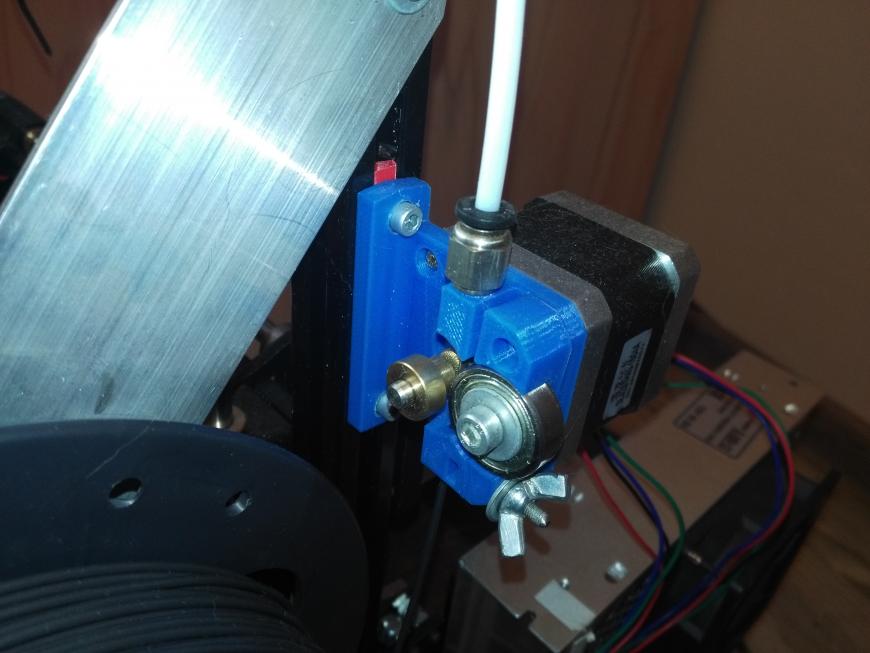
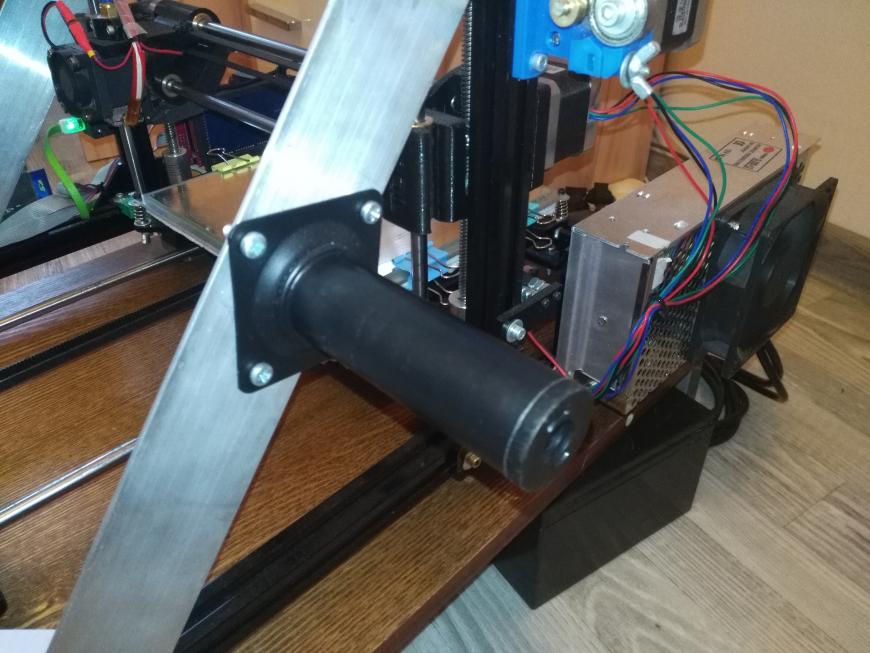
Ножка из Леруа Мерлен на укосине.
А в катушку распечатал вот такие вставки и стопор.




Ток выставил экспериментально, чтоб мотор крутился и не пропускал шаги под нагрузкой.
Экспериментально определил количество шагов на 1см.
Тестовая печать прямоугольного столба в 2 стенки.
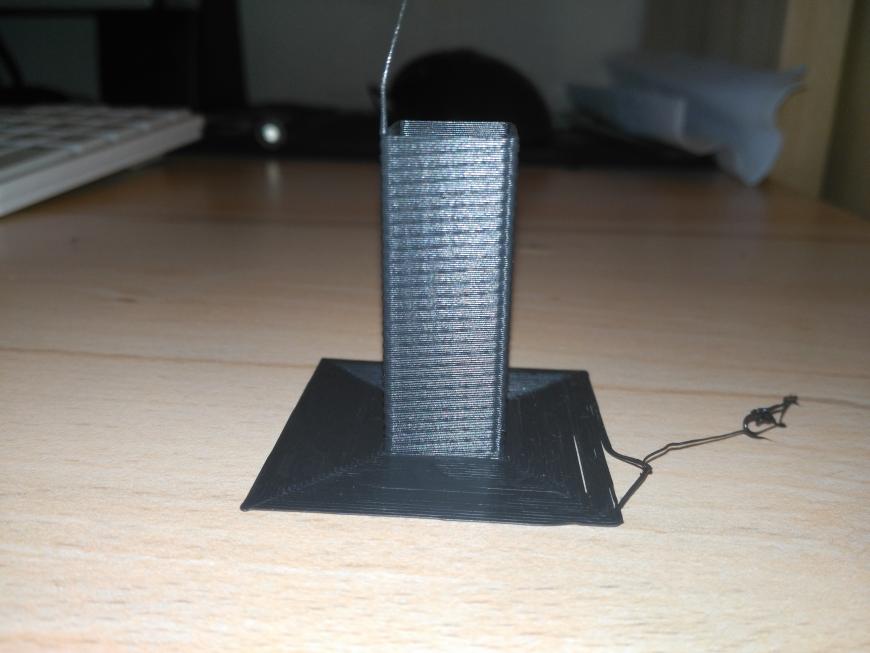
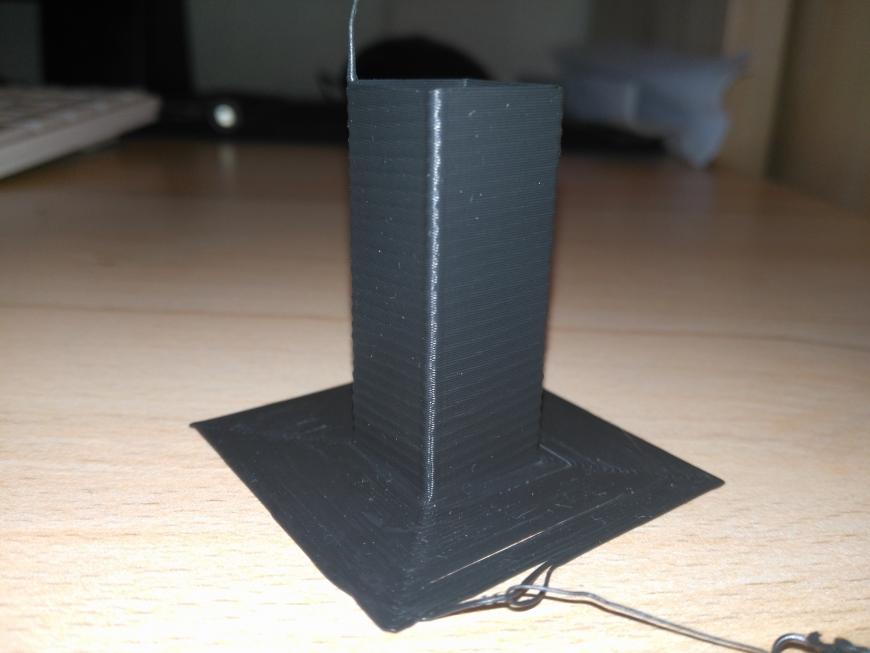
. дала вот такие занимательные артефакты.
Оно даже печатает, но при печати мотор разогрелся.
В общем для прямого привода моторчик явно не годится. 🙂
Надо попробовать собрать экструдер с редуктором или с ременной передачей.
Прекрасно понимаю что все это блажь и баловство, не заменит этот моторчик хорошо работающий nema17 17hs4401.
Подытожу: не каждый эксперимент удачный, зато в процессе приобретается бесценный опыт 🙂
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Выбираем шаговый двигатель для 3D-принтера: особенности и назначение устройств
С появлением 3D-принтеров жизнь людей стала значительно проще. Устройства успешно используют во многих сферах — стоматологии, промышленности, ювелирном деле и медицине. Сейчас 3D-принтер — не предмет роскоши, а вполне доступная по стоимости конструкция. Но все же есть те, кто решается на самостоятельное изготовление печатающих станков. Далее поговорим о том, как выбрать шаговый двигатель для будущего 3D-принтера и какие особенности при этом стоит учесть.
Двигатель на 3D-принтере
В конструкции 3D-принтера основную функцию за движение экструдера по осям выполняют шаговые двигатели. Они имеют незначительный вес и большой крутящий момент.
Шаговый электродвигатель — это двигатель, не имеющий коллектора, у которого вращение производится не плавно, а дискретно (шагами). Задавая скорость и длительность импульсов, можно заставить устройство вращаться в определенном направлении. При этом есть возможность регулировать направление вращения и количество оборотов ротора.
Если говорить о конструкции подобных устройств, то выделяют три основных вида:
- Двигатели с переменным магнитным сопротивлением — имеют несколько полюсов на статоре и ротор, изготовленный из мягкого материала, и 3 независимые друг от друга обмотки. Этот вид практически не используется.
- Двигатели с постоянным магнитным сопротивлением — в комплектацию входит статор и намагниченный ротор. Такие двигатели имеют от 24 до 48 шагов на один оборот.
- Устройства, сочетающие переменное и постоянное магнитное сопротивление (гибриды) — сочетание лучших свойств переменного и постоянного вращающего двигателя. Число шагов составляет от 100 до 400.
Гибридный двигатель — наиболее часто встречающаяся конструкция, которая, в свою очередь, делится на униполярный и биполярный тип.
Какие шаговые двигатели выбрать для 3D-принтера: лучшие варианты
При покупке вращающего устройства для 3D-принтера стоит обратить внимание на следующие параметры:
- размер вращающей конструкции;
- момент удержания — от 2,5–4 кг/см;
- номинальный ток — оптимальная версия на 1,7 А;
- вал — диаметр должен соответствовать конструктивным параметрам принтера.
Самые распространенные двигатели, которые устанавливают на конструкцию печатного устройства — биполярный с четырьмя выводами. Такие конструкции в случае поломки легко найти и заменить.

В 3D-принтерах устанавливаются вращающие моторы с маркировкой NEMA.
NEMA — Национальная ассоциация производителей электрооборудования, которая стандартизировала вращающие устройства по таким параметрам, как размер фланца и посадочные параметры. Такой стандарт позволяет разным производителям выпускать двигатели по определенным параметрам в зависимости от маркировки.
Самые востребованные модели в серии NEMA:
- NEMA 17 с фланцем 42 * 42 мм;
- NEMA 23 с фланцем 57 * 57 мм;
- NEMA 34 размером 86 * 86 мм.
Драйверы шаговых двигателей для 3D-принтера
Для управления двигателями в 3D-устройствах были разработаны драйверы, устанавливаемые в гнездо платы.

Драйверы бывают несколько типов:
- Постоянного напряжения — такие драйверы неэффективны и используются в изделии с малыми скоростями.
- Двухуровневые — подобные контроллеры поддерживают шаговые и полушаговые режимы. Они снижают нагрев двигателя и эффективны в работе.
- Драйверы с ШИМ — самые популярные, которые можно встретить на рынке. Они высокоинтеллектуальные и имеют множество дополнительных функций.
Также при выборе драйвера стоит обращать на следующие параметры:
- сила тока;
- напряжение питания;
- наличие опторазвязанных входов;
- наличие механизмов подавления резонанса;
- наличие протоколов, необходимых для работы двигателя;
- защита от скачков напряжения;
- микрошаговый режим;
- качество драйвера.
Собрать качественный 3D-принтер вполне реально, если следовать рекомендациям и внимательно изучить конструктивные устройства. Вполне возможно, что такой печатный станок обойдется его владельцу дешевле. Но новичкам мы рекомендуем заказывать готовые 3D-устройства в специализированных магазинах. Так вы сможете освоить азы 3D-печати и ознакомиться с устройством принтера. Желаем удачи!
- 17 мая 2021
- 517
Станок с ЧПУ
Станок с ЧПУ (Числовым Программным Управлением) – станок, работа которого подчиняется заранее заданной программе. Благодаря этому для обработки детали не нужен человек. Нарисовал на компьютере детальку, установил в станок заготовку, нажал пуск и пошел пить чай. По возвращении достаешь готовую детальку из станка. Фантастика? Совсем нет, такой станочек можно сделать самостоятельно!

Оригинальная статья была опубликована на портале licrym.org Здесь публикуется с сокращениями. Как обычно — это единственный репост.
Текст приведенный ниже не будет содержать пошаговых инструкций – что как пилить и куда вставлять. Поняв концепцию и ориентируясь на те детали, что есть в наличии вы сможете собрать свой, уникальный вариант станка. Если есть возможность – можно купить готовый комплект для сборки, или заказать определенные узлы. Результат прямо зависит от аккуратности изготовления, количества промышленно изготовленных деталей и усидчивости.
Станок у нас будет с 3мя степенями свободы – поступательные движения по осям X, Y и Z. Рабочее поле прямо пропорционально длине направляющих, которые мы используем. Точность во многом будет зависеть от качества сборки.
Станок будет называться «Гефест».
Инструменты и материалы
При создании данного станка из инструмента использовались:
* Шуруповерт
* Лобзик
* Электроточило
* Резьбонарезной инструмент/напильники/надфили и прочая мелочь.
* Фанера
* алюминиевый уголок
* много всяких винтиков и гаечек
* Эпоксидный клей и эпоксилин
* Два шаговых моторчика протяжки бумаги от лазерных принтеров,
* Шаговый двигатель привода головки из матричного принтера
* Направляющие с бронзовыми подшипниками скольжения из матричных принтеров
* Метровая шпилька М10
Материалы закупаются в любом строительном магазине, детали вытаскиваются из старой техники.
Механика
Есть отличная статья где всё по полочкам расписано как надо бы делать станки.
Конструктивно была выбрана конструкция с жестким порталом, перемещающимся по оси X столом. Строгих требований к станку не предъявлялось – было просто интересно попробовать и не было желания тратить на эксперимент больших сумм денег. В итоге практически полностью станок был собран из того, что было в моих закромах.
Направляющие были использованы из матричных принтеров, вместе с родными подшипниками скольжения. В качестве ходовых винтов – стальные строительные шпильки М10. Гайки на ходовых винтах – самые обыкновенные – шестигранные.
Если есть возможность – можно купить готовый координатный стол, например proxxon сразу исчезнет проблема с обеспечением точности.
По оси Z используется мебельная направляющая с шариками. В интернете видел станок полностью выполненный на таких мебельных направляющих.
Качество работы станка прямо зависит от точности изготовления. Шпильки, обточенные вручную на электроточиле дадут более худший результат, чем шпильки обточенные на токарном станке. В данном случае шпильки были обточены вручную, как выяснилось в итоге с небольшим нарушением соосности, что в конечном итоге привело к биениям.
Шпильки по оси X и Y упираются своими концами в шарикоподшипники, которые закреплены при помощи эпоксилина. Вторым своим концом шпильки через муфты соединены с двигателями. Муфты выполнены из отрезка стальной трубочки с отверстиями под зажимающие винты. В качестве муфты можно использовать несколько слоев термоусадочной трубочки, дополнительно скрепленных нейлоновыми стяжками. При отсутствии сильного нагрева они могут дать приемлемый результат.
В связи с невозможностью изготовить все детали станка точно (а делалось всё вручную фактически на коленке) многие соединения выполнены на винтах, с последующей регулировкой. На фото станина станка и предварительно установленные направляющие с ходовыми винтами:

Стол с прикрепленным к нему приводом оси X:

После установки направляющих было необходимо выставить опоры с подшипниками скольжения так, что бы они не были перекошены и стол двигался по направляющим легко. После достаточно длинных танцев с надфилем этого удалось добиться и винты были затянуты.
Привод оси Y был сделан аналогичным образом:

Привод оси Z не имеет шарикоподшипника на конце винта.
В собранном состоянии детали станка должны перемещаться при вращении винта пальцами без значительных усилий. В противном случае мощности двигателя может просто не хватить на преодоление сил трения и деформации вследствие неточности станка.
В качестве шпинделя использована бормашинка proxxon. Можно закрепить любой достаточно мощный двигатель.
В качестве фрез можно использовать стоматологические буры, насадки для дремелей.
Двигатели
В качестве двигателей вполне подойдут шаговые двигатели от принтеров. Чем двигатель крупнее – тем лучше – бОльшую мощность от него можно получить. По оси X и Y установлены двигатели из привода бумаги лазерных принтеров, имеют 48 шагов на один оборот вала. По оси Z используется двигатель от привода головки матричного принтера с 200 шагов на один оборот вала. К сожалению, полную документацию на двигатели найти не удалось.
Электроника
Механика станка собрана, двигатели установлены. Теперь нам нужно сделать две вещи – это контроллер, который будет принимать сигналы от компьютера, и включать соотвествующие обмотки двигателей, и блок питания, который будет прокармливать всё это хозяйство.
Контроллер собран на базе микросхем L297 и L298 по следующей схеме.
Фото платы в сборе: 
Это так называемый step/dir контроллер. Название говорит о том, что на вход подается для каждой из осей 2 сигнала: шаг (step) и направление (direction). Направление указывает – по часовой стрелке вращается двигатель или против. Каждый импульс step будет поворачивать вал двигателя ровно на один шаг.
Блок питания – простой трансформаторный, со сглаживающим конденсатором. Можно использовать компьютерный блок питания.
Контроллер вместе с блоком питания: 
Контроллер подключается к компьютеру через LPT порт.
Программное обеспечение
Без программы станок всего лишь груда железа. Станки с ЧПУ обычно управляются G кодом, который стандартизирован. Прежде всего нам необходима программа, которая бы принимала на входе некоторую последовательность G команд и выдавала необходимые импульсы в LPT порт, к которому у нас подключен драйвер.
Примеры таких программ:
TurboCNC (работает под ДОС)
Mach3
KCAM
LinuxCNC
Я использовал программу Mach3, скриншот работы которой ниже:

В комплекте с Mach3 есть программа LazyCAM в которую был загружен dxf файл с картинкой, которая была превращена в набор управляющих G-кодов. Эти коды были отправлены в mach3 и запущена обработка.
Испытания
Испытания фломастером: 
Вот процесс гравировки станком логотипа кафедры: 
Отгравированное лого: 
Как видим станок работает. На выполнение гравировки ушло порядка 15 минут. Из-за неточности обработки хвостов шпилек и неточности изготовления деталей есть биения, например видно волнистость линии на вершине елочки, шаг волнистости 1,5 мм как раз соответствует шагу резьбы.
Фактическая точность станка выходит порядка 0,5 мм. Максимальная скорость перемещения – 200 мм/мин. Рабочее поле 230*230 мм.

