
Шаговый электродвигатель
Шаговый электродвигатель
Ша́говый электродви́гатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.


Содержание
Описание
Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого (ферромагнитного) материала или из магнито-твёрдого (магнитного) материала. Шаговые двигатели с магнитным ротором позволяют получать бо́льший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.
Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8 — 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи.

Использование
В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шаг/об). Точность выставления шага определяется качеством механической обработки ротора и статора электродвигателя. Производители современных шаговых электродвигателей гарантируют точность выставления шага без нагрузки до 5 % от величины шага.
Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага или при увеличении количества фаз.
Режим дробления шага (микрошаг) реализуется при независимом управлении током обмоток шагового электродвигателя. Управляя соотношением токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. Таким образом можно повысить плавность вращения ротора и добиться высокой точности позиционирования. Качество изготовления современных шаговых двигателей позволяет повысить точность позиционирования в 10-20 раз.
Шаговые двигатели стандартизованы по посадочным размерам и размеру фланца: NEMA 17, NEMA 23, NEMA 34, … — размер фланца 42 мм, 57 мм, 86 мм, 110 мм соответственно. Шаговые электродвигатели NEMA 23 могут создавать крутящий момент до 30 кгс*см, NEMA 34 до 120 кгс*см и до 210кгс*см для двигателей с фланцем 110 мм.

Шаговые двигатели создают сравнительно высокий момент при низких скоростях вращения. Момент существенно падает при увеличении скорости вращения. Однако, динамические характеристики двигателя могут быть существенно улучшены при использовании драйверов со стабилизацией тока на основе ШИМ.
Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов, например, в станках с ЧПУ. В отличие от сервоприводов, шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения.
Шаговые двигатели применяются в устройствах компьютерной памяти — НГМД, НЖМД, устройствах чтения оптических дисков.
Датчик поворота
Шаговые двигатели с постоянными магнитами могут использоваться в качестве датчиков угла поворота благодаря возникновению ЭДС на обмотках при вращении ротора.
Преимущества
Главное преимущество шаговых приводов — точность. При подаче потенциалов на обмотки шаговый двигатель повернется строго на определенный угол. К приятным моментам можно отнести стоимость шаговых приводов, в среднем в 1,5-2 раза дешевле сервоприводов. Шаговый привод, как недорогая альтернатива сервоприводу, наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика.
Digitrode
цифровая электроника вычислительная техника встраиваемые системы
- Вычислительная техника
- Микроконтроллеры микропроцессоры
- ПЛИС
- Мини-ПК
- Силовая электроника
- Датчики
- Интерфейсы
- Теория
- Программирование
- ТАУ и ЦОС
- Перспективные технологии
- 3D печать
- Робототехника
- Искусственный интеллект
- Криптовалюты
Чтение RSS
Драйвер шагового двигателя: принцип работы, особенности, как выбрать драйвер
Как управлять шаговым двигателем
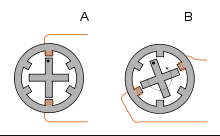
Стандартный шаговый двигатель с постоянными магнитами имеет две обмотки. Если в системе используется биполярный драйвер, вращение достигается путем подачи определенной последовательности сигналов прямого и обратного тока через две обмотки. Таким образом, для биполярного шагового двигателя требуется H-мост для каждой обмотки. В униполярном приводе используются четыре отдельных драйвера, и они не должны иметь возможность подавать ток в обоих направлениях: центр обмотки представляется как отдельное соединение двигателя, а каждый драйвер обеспечивает ток, протекающий от центра обмотки к концу обмотки. Ток, связанный с каждым драйвером, всегда течет в одном и том же направлении.

На рисунке выше представлен биполярный шаговый двигатель (слева) и униполярный (справа). Направление протекания тока в однополярной системе указывает на то, что центр каждой обмотки подключен к напряжению питания двигателя.
Универсальные микросхемы для управления шаговым двигателем
Первое, что нужно иметь в виду – это то, что микросхемы, предназначенные для основных функций управления двигателем могут использоваться с шаговыми двигателями. Вам не нужна микросхема, которая специально помечена или продается как устройство управления шаговым двигателем. Если вы используете биполярный привод, вам нужно два H-моста на шаговый двигатель; Если вы используете однополярный подход, вам нужно четыре драйвера для одного двигателя, но каждый драйвер может быть одним транзистором, потому что все, что вы делаете, это включаете и выключаете ток, а не меняете его направление.
Примером компонента в категории «универсальная микросхема» является DRV8803 от Texas Instruments. Это устройство описано как «драйверное решение для любого приложения переключения нижнего плеча».

В таком устройстве центр обмоток шагового двигателя подключен к напряжению питания, а к обмоткам подается питание путем включения транзисторов нижнего плеча, чтобы они позволяли току течь от источника питания через половину обмотки, далее через транзистор и на землю.
Подход с использованием универсальной микросхемы удобен, если у вас уже есть опыт работы с подходящим драйвером – вы можете сэкономить несколько долларов, повторно использовав старый компонент, или сэкономить время (и уменьшить вероятность ошибок проектирования), включив известную и проверенную микросхему в вашу цепь управления шаговым двигателем. Но более сложная микросхема может обеспечить расширенную функциональность и упростить задачу проектирования, поэтому предпочтительнее взять шаговый драйвер с дополнительными функциями.
Полнофункциональные драйверы шаговых двигателей
Высокоинтегрированные контроллеры шагового двигателя могут значительно сократить объем проектных работ, связанных с применением более мощных шаговых двигателей. Первая полезная особенность, которая приходит на ум – это автоматическая генерация управляющей последовательности, т.е. способность преобразовывать прямые входные сигналы управления двигателем в требуемые последовательности сигналов. Давайте рассмотрим L6208 от STMicroelectronics, в качестве примера.

Вместо логических входов, которые напрямую контролируют ток, подаваемый на обмотки двигателя, L6208 имеет:
- Вывод, который выбирает между полушагом и полным шагом.
- Вывод, который задает направление вращения.
- Вывод «синхроимпульса», который заставляет внутренний конечный автомат управления двигателем меняться на один шаг при появлении фронта сигнала.
Этот интерфейс гораздо более интуитивно понятен, чем фактические последовательности включения и выключения, которые применяются к транзисторам, подключенным к обмоткам (пример которых приведен ниже).

Это последовательность для управления биполярным шаговым двигателем. «A» и «B» относятся к двум обмоткам, а столбцы «Q» указывают состояние транзисторов, управляющих током обмотки.
Микрошаги
Как следует из названия, функция микрошага заставляет шаговый двигатель выполнять вращение, которое значительно меньше одного шага. Это может быть 1/4 шага или 1/256 шага или где-то посередине. Микрошаг гарантирует точное позиционирование двигателя и обеспечивает более плавное вращение. В некоторых приложениях микрошаг совершенно не нужен. Однако, если ваша система может извлечь выгоду из чрезвычайно точного позиционирования, более плавного вращения или уменьшения механического шума, вам следует рассмотреть возможность использования микросхемы драйвера с возможностью организации микрошагов.
TMC2202 от Trinamic является примером микрошагового контроллера шагового двигателя.

Размер шага может быть всего лишь 1/32 от полного шага, также здесь есть некоторая функциональность интерполяции, которая обеспечивает «полную плавность 256 микрошагов». Эта микросхема также дает вам представление о том, насколько сложным может быть шаговый драйвер – он имеет интерфейс UART для управления и диагностики, специализированный алгоритм драйвера, который улучшает работу в режиме ожидания и низкоскоростную работу, а также различные другие вещи, о которых вы можете прочитать в 81-страничной документации на TMC2202.
Заключение
Если у вас есть микроконтроллер для генерации последовательностей для управления шаговым двигателем и достаточно времени и мотивации для написания надежного кода, вы можете управлять шаговым двигателем с помощью дискретных полевых транзисторов. Тем не менее, почти во всех ситуациях предпочтительнее использовать какую-либо микросхему, и, поскольку на выбор имеется так много устройств и функций, у вас не должно возникнуть особых проблем с поиском компонента, подходящего для вашего приложения.
Глава 4. Модель крана как пример применения шаговых двигателей
Делись добром 😉
- Введение
- Глава 1. Виды, устройство и принцип работы шаговых двигателей [6]
- 1.1 Общие принципы шаговых двигателей
- 1.2 Виды шаговых двигателей
- · двигатели с переменным магнитным сопротивлением
- 1.2.1 Двигатели с переменным магнитным сопротивлением
- 1.2.2 Двигатели с постоянными магнитами
- 1.2.3 Гибридные двигатели
- 1.2.4 Биполярные и униполярные шаговые двигатели
- 1.3 Способы управления фазами ШД
- Глава 2. Контроллеры шаговых двигателей
- 2.1 Управление шаговым двигателем с помощью автономного контроллера
- 2.2 Управление шаговым двигателем с использованием ЭВМ
- 2.3 Реализация адаптера шагового двигателя
- Глава 3. Управление контроллером с помощью системы программирования PureBasic
- 3.1 Особенности системы программирования PureBasic
- 3.2 Синтаксис
- 3.3 Сравнение с Basic и Pascal
- 3.4 Особенности PureBasic
- 3.5 Программирование LPT порта
- Глава 4. Модель крана как пример применения шаговых двигателей
- 4.1 Устройство модели
- Заключение
Похожие главы из других работ:
1.4 Область применения и пример использования
Основное преимущество работающих на природном газе АБХМ — сокращение эксплуатационных расходов за счет сокращения потребления относительно дорогостоящей электрической энергии и выравнивание пиковых нагрузок на систему электроснабжения.
Пример выполнения работы
Тема: Проектирование заготовки для заданной детали из заданной марки стали методом свободной ковки на молотах (по ГОСТ 7829). Задание: Назначить основные и дополнительные припуски и предельные отклонения.
Глава 1. Виды, устройство и принцип работы шаговых двигателей [6]
1.1 Общие принципы шаговых двигателей
Шаговый двигатель — механическое устройство, преобразующее электрические импульсы в механическое, причём, в отличие от других двигателей, «управляемое» движение, т.е.
1.2 Виды шаговых двигателей
Существуют три основных типа шаговых.
Глава 2. Контроллеры шаговых двигателей
2. Пример практического применения FМЕА — методологии
5. Пример реализации метода
Широкое применение для очистки шахтных вод находят напорные скорые фильтры диаметром от 1 до 3,4 метров, они применяются в подземных водоочистных установках типа «Дон» и хорошо себя зарекомендовали.
4. Пример расчета неопределенности
Результаты испытаний представлены в таблице 4.1 Таблица 4.1 № измерения qi, дм3 ti, с 1 158,08 66,93 2 159,21 68,18 3 157,85 67,14 4 158,17 67,82 5 157,34 66,81 Среднее 158,13 67,38 Площадь точечной пробы: А=0,005 м2.
3.5 Пример расчета поставов
Производится расчет количества пиломатериалов, подлежащих выпиловке в погонных метрах (кроме разнотолщинных). Первая вторая и третья графа таблицы заполняется по данным задания на проектирование (приложение А).
5. Пример фрезерного станка
Фрезерные станок модели ФСМ 250/676М, предназначен для обработки деталей из черных и цветных металлов и их сплавов фрезерованием, сверлением, развертыванием.
Виды шаговых двигателей
Существуют три основных типа шаговых двигателей: Двигатели с переменным магнитным сопротивлением.
Принцип работы шаговых двигателей
Принцип действия шагового двигателя состоит в том, что при прохождении токов по обмоткам статора (обмоткам управления) ротор развивает синхронизирующий момент.
Характеристики шаговых двигателей
Существуют статические и динамические характеристики. Статические характеристики- характеристики, относящиеся к заторможенному двигателю. Рисунок 11- характеристики шаговых двигателей Т-?-характеристика.
Резонанс шаговых двигателей
Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде внезапного падения момента на некоторых скоростях. Это может привести к пропуску шагов и потере синхронности.
Шаговый двигатель: принцип действия, схема, описание, характеристики
В современной электротехнике используется множество самых разнообразных устройств, некоторые из них предназначаются для автоматизации технологических операций. Таковым является и шаговый двигатель. Принцип работы и устройство данного прибора описаны в статье.
Что это такое?
 Так называется электромеханическое устройство, служащее для передачи управляющего сигнала в механическое движение ротора. Каждое движение заканчивается фиксацией в строго заданном положении. Прибор бывает угловым или же линейным. Стоит помнить, что шаговый двигатель, принцип работы которого будет изложен ниже, является синхронным устройством.
Так называется электромеханическое устройство, служащее для передачи управляющего сигнала в механическое движение ротора. Каждое движение заканчивается фиксацией в строго заданном положении. Прибор бывает угловым или же линейным. Стоит помнить, что шаговый двигатель, принцип работы которого будет изложен ниже, является синхронным устройством.
Системы управления с разомкнутой цепью (без обратной связи)
Чаще всего это оборудование управляется специальной электронной схемой. Питается оно только от источника переменного тока. Такие двигатели часто используются в схемах, где требуется управление частотой вращения. Это позволяет избежать необходимости использования дорогого и сложного контура обратной связи, да и защита электродвигателя становится проще (требуется только предусмотреть быстрое обесточивание).
Несложно догадаться, что под Рном понимается номинальная мощность электродвигателя в кВт.
Простейшая схема подключения двигателя EM-178
А сейчас нами будет рассмотрено простейшее подключение шагового двигателя на примере модели ЕМ-178, которая повсеместно используется в промышленных принтерах.
Выполняется подключение шагового двигателя к красному контроллеру
Подключается к синему разъему
Расписать работу более масштабно попросту не получится, так как существуют миллионы самых разнообразных моделей, характеристики которых имеют существенные различия.
В настоящее время используются различные типы электродвигателей этой конструкции. В статье мы обсудим самые распространенные.
Реактивные двигатели
Именно эта разновидность приборов повсеместно используется по сей день. По сути, это почти стандартный трехфазный двигатель, на статоре которого имеется шесть зубцов. Проще говоря, каждые два зубца, противостоящие друг другу, принадлежат к одной и той же фазе. Используется последовательное или параллельное соединение их катушек.
Что касается ротора, то на нем располагается только четыре зубца. Чаще всего статор и ротор производители изготовляют из магнитомягкого материала, но нередко можно встретить просто массивные роторы из обычных металлов. Все дело в том, что к веществам, которые идут на их производство, имеется только одно важное требование: они должны обеспечивать как можно лучшую проводимость магнитного поля. Это чрезвычайно важно, если обсуждать шаговый двигатель: принцип работы напрямую связан с напряженностью магнитного поля.
Устройства с постоянными магнитами
В качестве ротора используется магнит цилиндрической формы, на статоре же есть четыре зубца с индивидуальной обмоткой. Чтобы сильнее уменьшить угол шага, в этих моделях шаговых двигателей приходится увеличивать как количество полюсов ротора, так и число зубцов на статоре. Впрочем, следует помнить о том, что оба этих параметра имеют достаточно строгие физические ограничения. В последнем абзаце нашей статьи есть информация об альтернативной их конструкции (биполярный шаговый двигатель), но такие модели можно встретить не так часто.
Как мы уже говорили, шаговые устройства с постоянными магнитами останавливаются в строго фиксированном положении даже в тех случаях, когда убрано напряжение с обмоток. В этом случае срабатывает тот самый механизм фиксации, который мы обсудили выше, – положение фиксации.
Использование постоянных магнитов оправдано с многих точек зрения, но в то же время их применение может приводить сразу к нескольким проблемам. Во-первых, их цена далека от доступной. Кстати, сколько стоит такой шаговый двигатель? Цена моделей с постоянными магнитами превышает 100 тысяч рублей.
Во-вторых, максимальная плотность магнитного поля может быть не слишком высока, так как это значение ограничено намагниченностью самого носителя. Так, сравнительно дешевые постоянные ферритовые магниты не позволяют получить более-менее достаточной напряженности поля. А какие есть еще типы электродвигателей, работающих по этому принципу?
Гибридные установки
 Есть и другой тип шагового двигателя, частично использующий тот же принцип. Гибридные модели работают с применением как реактивного, так и магнитного двигателей.
Есть и другой тип шагового двигателя, частично использующий тот же принцип. Гибридные модели работают с применением как реактивного, так и магнитного двигателей.
Ротор имеет практически ту же конструкцию, что и у реактивного ШД, но вот обмотки производятся по несколько иной схеме. Дело в том, что на каждом полюсе обмотка есть только у одной катушки (трехфазные ШД). Нетрудно догадаться, что в четырехфазных моделях намотано уже две катушки. Намотка ведется по бифилярной схеме. Особенность в том, что при возбуждении на катушках создается магнитное поле разных полярностей (биполярный шаговый двигатель).

