Шаговый двигатель схема подключения usb
Шаговый двигатель схема подключения usb
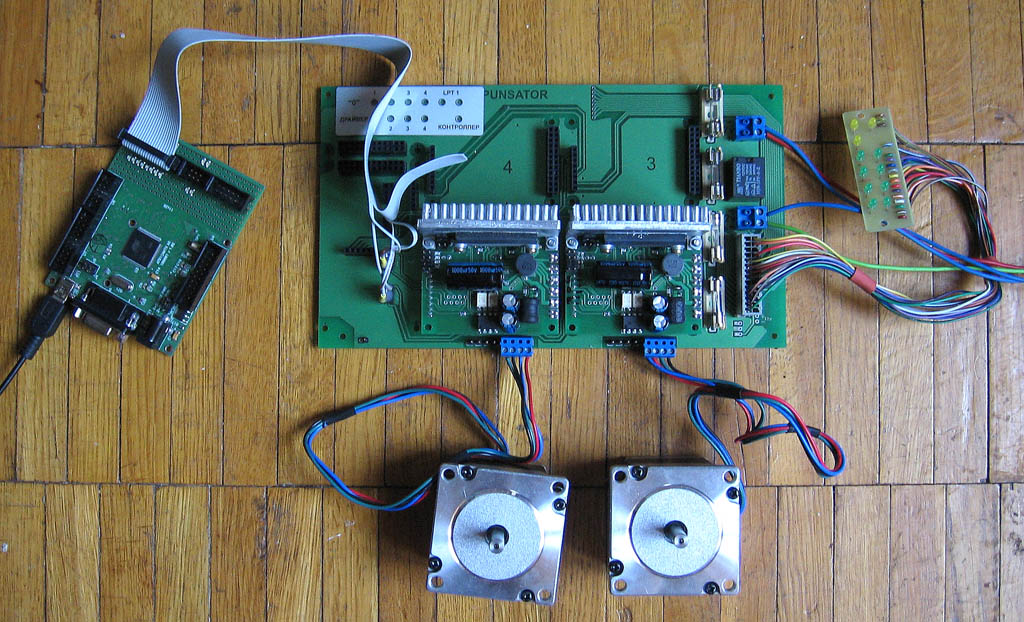
Контроллер собран на макетной плате AT91SAM7X [1] и представляет собой USB-устройство CDC (виртуальный COM-порт). Контроллер может одновременно управлять 8 шаговыми двигателями, откликаясь на простые текстовые команды.
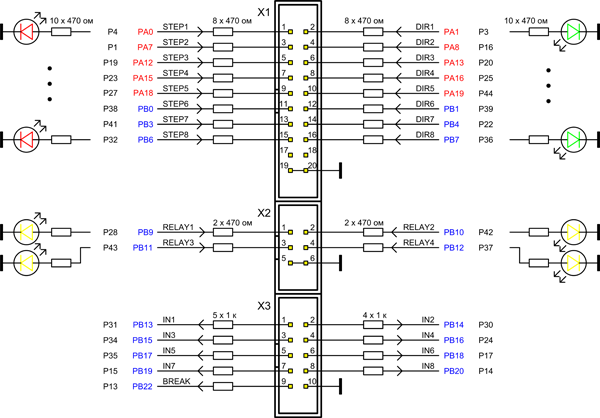
Сигналы STEPn и DIRn вырабатываются контроллером индивидуально для каждого шагового двигателя, и подаются на силовые модули, собранные на микросхеме TB6560HQ (силовые фазы для шагового двигателя формирует именно эта микросхема).
Есть также возможность управлять четырьмя силовыми реле (сигналы RELAY1..RELAY4). Кроме того, имеются 8 входов для подключения датчиков (IN1..IN8) — концевых выключателей, по сигналу которых мотор может останавливаться. Также есть один общий аварийный сигнал BREAK, который останавливает вращение сразу всех двигателей.
Команды для управления шаговыми двигателями и реле можно подавать обычной терминальной программой (putty, HyperTerminal, TerraTerm, SecureCRT и т. п.).
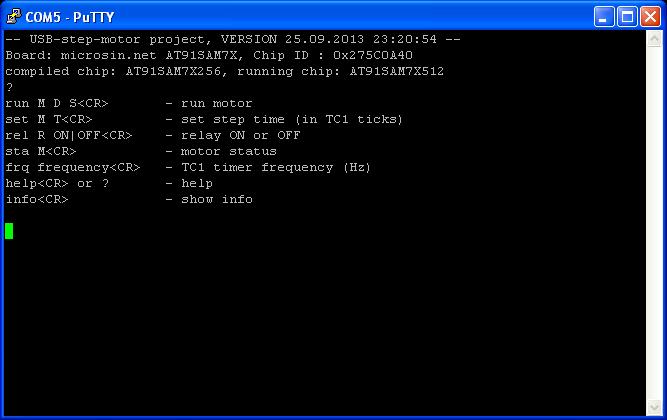
run M D S
Эта команда запускает вращение двигателя M (1..8) в направлении D (L или R) на количество шагов S (0..65000). Если S равно 0, то двигатель останавливается по завершении текущего шага.
set M T
Команда устанавливает длительность периода сигнала STEP мотора M на время T. Число T указывает количество тиков таймера, и может быть в диапазоне от 5 до 6500, что соответствует длительности периода STEP от 50 до 65000 мкс.
rel R ON
rel R OFF
Команда выдает лог. 1 для включения реле R (если указано ON).
Кроме того, имеются 8 входов для подключения датчиков (IN1..IN8) — концевых выключателей, по сигналу которых мотор может останавливаться. Также есть один общий аварийный сигнал BREAK, который останавливает вращение сразу всех двигателей.
sta M
Команда запрашивает статус мотора M — контроллер выдает в ответ оставшееся до остановки количество шагов и направление вращения.
frq frequency
Установка частоты срабатывания таймера TC1, который определяет длительность шагов STEPn всех шаговых двигателей целиком. Период таймера TC1 соответствует одной единице измерения длительности шага.
help или ?
Выдача подсказки по командам.
info
Выдача общей информации по состоянию контроллера — текущие длительность и направление всех шаговых двигателей, частота таймера TC1, время работы контроллера.
[Данные, которые передает контроллер в компьютер]
Если сигнал на входе BREAK перешел из лог. 0 в лог. 1, то контроллер передает BH, а если этот сигнал перешел из лог. 1 в лог. 0, то передает BL, и останавливает все шаговые двигатели.
Контроллер также сообщает об изменениях состояния концевых выключателей (датчиков, подключенных к входам IN1..IN8) следующим образом: DML, DMH. Здесь M номер датчика, а L и H – текущее состояние входа датчика (низкий и высокий уровни соответственно).
[Схема контроллера]
Схемы как таковой нет, так как вся основная обвязка контроллера уже имеется на макетной плате AT91SAM7X. На макетное поле напаяны только коннекторы, резисторы и индикационные светодиоды. Силовые модули шаговых двигателей подключаются через коннектор X1, через X2 подключаются ключи для реле, через X3 подключены датчики (простые замыкатели на землю, GND).
На фото показаны коннекторы и монтаж USB-контроллера шаговых двигателей.
Ethernet контроллер шаговых двигателей SMSD‑4.2LAN
Назад
| Напряжение питания, В постоянного тока | 24 – 48 |
| Максимальный ток фазы, А | 4,2 |
| Величина дробления шага | 1, 1/2, 1/4, 1/8, 1/16, 1/32, 1/64, 1/128 |
| Подключение к ПК | Ethernet, USB |
Вперед
Скачать 3D модель




Описание контроллера шаговых двигателей SMSD‑4.2LAN
SMSD‑4.2LAN — это контроллер для управления шаговыми двигателями нового поколения, с улучшенным и расширенным коммуникационным протоколом. Контроллер разработан для работы с двигателями малого и среднего типоразмеров с выходным током фазы до 4.2А. Основное преимущество контроллера — удаленное управление шаговым двигателем по локальной сети Ethernet. Также предусмотрено подключение контроллера к компьютеру с испольованием USB разъема.
Другая отличительная особенность контроллера — возможность использования вольтового режима управления для большого количества наиболее популярных и распространенных моделей шаговых двигателей. В этом режиме коммутация фаз выполняется с учетом электрических параметров конкретной модели двигателя. Такая коммутация обеспечивает исключительную плавность вращения двигателя и точное дробление шага вплоть до 1/128.
Контроллер предусматривает работу в одном из 5 основных режимов управления: покомандное управление в режиме реального времени, автономная работа в соответствии с одной из 4 сохраненных в памяти программ управления, аналоговое управление скоростью, аналоговое управление углом поворота, импульсное управление положением с использованием сигналов «ШАГ» и «НАПРАВЛЕНИЕ». Дополнительные цифровые входы и выходы контроллера обеспечивают легкое и быстрое подключение к другим электрическим элементам системы.
Режимы управления контроллера SMSD‑4.2LAN:
- Program mode — режим программного управления — контроллер SMSD‑4.2LAN имеет 4 области памяти для загрузки и хранения исполнительных программ. Исполнительные программы состоят из заранее составленных и сохраненных в память контроллера последовательностей команд. Каждая из 4 исполнительных программ может быть впоследствии вызвана по внешнему сигналу во время автономной работы блока или командой при подключении контроллера к компьютеру. Этот режим управления широко используется для циклических и повторяющихся технологических операций. Исполнительные программы записываются в память контроллера с компьютера используя подключение по локальной сети Ethernet или USB. Полный лист исполнительных команд приведен в открытом коммуникационном протоколе контроллера. Программное обеспечение для настройки, управления и программирования контроллера предоставляется нашей компанией бесплатно.
- Direct cotrol mode — командное управление в режиме реального времени — управление шаговым двигателем производится командами, отправляемыми от компьютера по сети Ethernet или через USB подключение. Контроллер выполняет каждую исполнительную команду сразу после получения ее от компьютера. В этом режиме управления предусмотрены вызовы подпрограмм, условные переходы и циклы. Полный список команд приведен в коммуникационном протоколе контроллера.
- Аналоговое управление скоростью — (ручной режим управления) — используется для плавного регулирования скорости аналоговым сигналом без использования компьютера. Скорость вращения двигателя пропорциональна аналоговому сигналу — уровню напряжения на входе «Скорость». Также предусмотрено регулирование скорости внешним потенциометром или встроенным подстроечным резистором. Направление вращения, запуск и остановка двигателя контролируются внешними цифровыми сигналами.
- Аналоговое управление углом поворота — позволяет управлять углом поворота аналоговым сигналом. Положение ротора двигателя зависит от аналогового сигнала на входе контроллера — уровень напряжения или положение потенциометра. Диапазон регулирования — 0. 270°.
- Импульсное управление положением STEP/DIR — стандартный импульсный режим управления сигналами «ШАГ» и «НАПРАВЛЕНИЕ». Скорость вращения двигателя пропорциональна частоте следования сигналов ШАГ (STEP), величина перемещения — количеству импульсов сигнала ШАГ (STEP). Направление вращения зависит от уровня сигнала на входе НАПРАВЛЕНИЕ (DIR). Для разрешения или блокировки вращения мспользуется сигнал РАЗРЕШЕНИЕ (ENABLE).
Функции и возможности контроллера SMSD‑4.2LAN:
- Удаленное управление шаговым двиагтелем по сети Ethernet;
- Автономное управление шаговым двигателем по одной из 4 независимых программ, хранящихся в памяти контроллера;
- Управление шаговым двигателем в режиме реального времени командами, передаваемыми от компьютера по Ethernet или USB;
- Чтение и запись испольнительных программ в память контроллера по сети Ethernet или USB;
- Контроллер хранит в памяти до 4 независимых исполнительных программ. Каждая программа может быть вызвана подачей внешнего сигнала в режиме автономной работы блока или командой при подключении к компьютеру. Каждая из программ может использоваться независимо от других или в качестве подпрограммы совместно с другими программами. Каждая исполнительная программа содержит до 255 исполнительных команд;
- Предусмотрено программное управление реле;
- Параметры управления двигателем (ток фазы, ток удержания, дробление шага, режим управления) настраиваются с использованием внешней панели и меню блока или через коммуникационный интерфейс (Ethernet или USB);
- Импульсное управление положением стандартными сигналами 0/5В (до 24В при условии подключения токоограничительных резисторов) «ШАГ», «НАПРАВЛЕНИЕ» и «РАЗРЕШЕНИЕ»;
- Предусмотрено аналоговое управление скоростью: с использованием внешнего или встроенного потенциометра или аналогового сигнала напряжения 0..5В;
- Предусмотрено аналоговое управление углом поворота двигателя: с использованием внешнего или встроенного потенциометра или аналогового сигнала напряжения 0..5В;
- Предусмотрена остановка двигателя при получении аварийного сигнала;
- Предусмотерно изменение направления вращения двигателя при получении сигнала реверса;
- Предусмотрена функция поиска начального положения;
- Предусмотерна функция запоминания текущего положения и переход в запомненное положение;
- Синхронизация действий нескольких контроллеров обеспечивается внешними входными и выходными сигналами;
- Контроль входного напряжения — при выходе значения напряжения питания за рамки допустимых значений (менее 20В или более 51В) в момент включения или в процессе работы в течение 2 секунд контроллер генерирует аварийный сигнал;
- Ускорение и замедление шагового двигателя настраивается через внешнюю панель и меню контроллера или командой по сети Ethernet или USB;
- В контроллере реализована внутренняя тормозная схема с возможностью подключения внешнего тормозного резистора;
- Предусмотрена звуковая сигнализация критических ситуаций;
- Контроллер оснащен двузнаковым семисегментным индикатором для настройки, отображения критических ситуаций и режимов работы контроллера;
- Для защиты доступа по локальной сети используется 32-битный пароль с интервалом авторизации 1с (136 лет для полного перебора вариантов пароля).
Software
Для настройки и управления контроллером по сети Ethernet или через USB мы предоставляем открытый коммуникационный протокол обмена данными. Также можно использовать бесплатное программное обеспечение SMC-Program Ver.5. Программа позволяет подключать контроллер по сети Ethernt или USB, управлять работой, считывать и записывать управляющие программы в память контроллера, менять настройки управления и параметры двигателя.
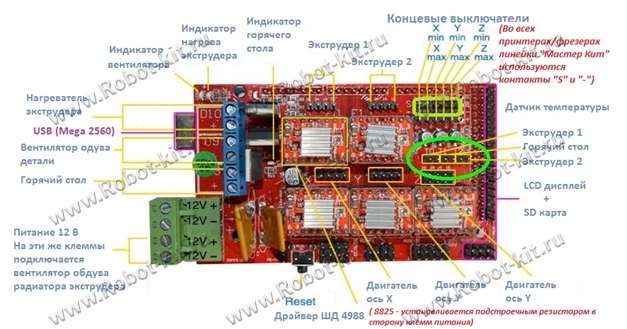
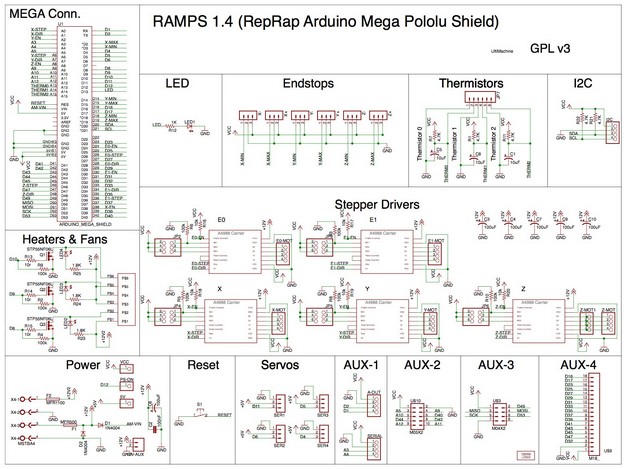
Шилд RAMPS 1.4 подключение к Arduino Mega
Шилд RAMPS 1.4 подключение к Arduino Mega.
Рассмотрим подключение платы Shield-RAMPS-1.4 на примере 3D принтера Mendel90.
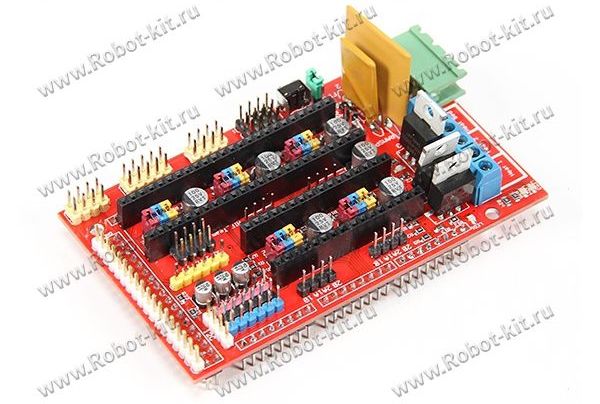
RAMPS 1.4 это шилд (надстройка) для Arduino Mega 2560. Ардуино преобразует G-коды в сигналы и управляет 3D принтером посредством силовой части — RAMPS 1.4.
Плата RAMPS 1.4 одевается поверх Arduino и все подключения, кроме USB, осуществляются через неё. Питание 12В на Arduino подаётся через RAMPS 1.4.
Двухэкструдерная схема подключения
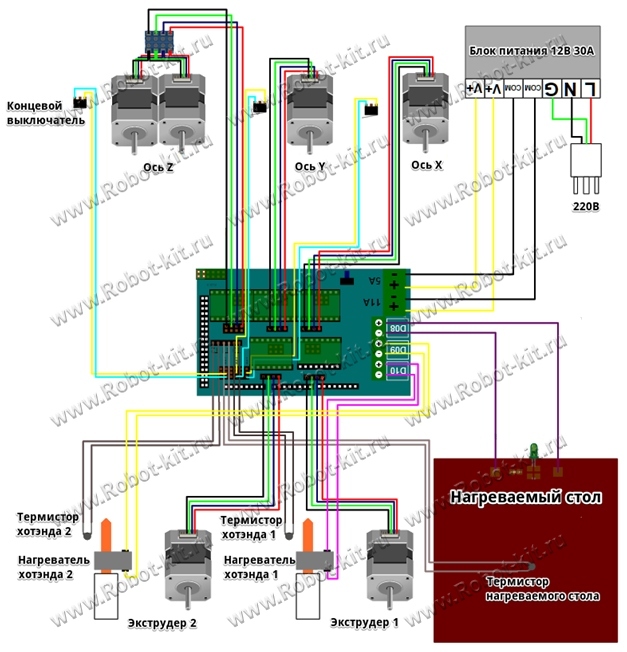
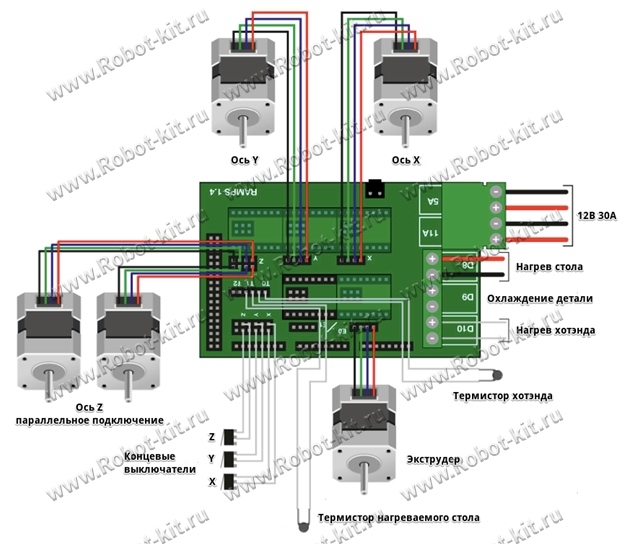
Схема подключения с одним экструдером
Обычно используют билинейные (четыре провода) шаговые двигатели на 1,7 А типоразмера Nema 17. Провода желательно свить в косички для защиты от наводок.
Шаговые двигатели для оси Z можно подключать двумя способами:
- Первый способ.
Параллельное подключение пары шаговых двигателей на одну ось Z — это когда штекер каждого шагового двигателя подключается к своему индивидуальному разъему на плате RAMPS 1.4.
Такой способ подключения шаговых двигателей для оси Z является стандартным подключением к плате RAMPS 1.4.
Следует заметить, что при параллельном (стандартном) подключении могут возникать проблемы с рассинхронизацией шаговых двигателей, если будет иметь место разница в сопротивлении обмоток у подключаемой пары шаговых двигателей. - Второй способ.
Второй способ это подключить шаговые двигатели последовательно одним штекером по схеме показанной ниже.
При таком последовательном подключении двух шаговых двигателей по оси Z проблем с рассогласованием пары движков уже не будет наблюдаться.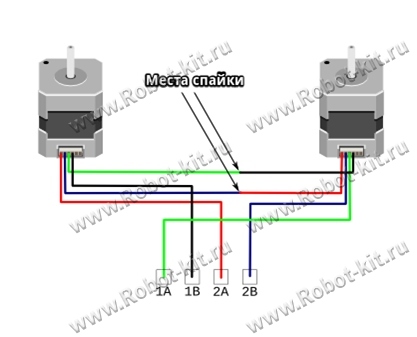

Питание на RAMPS 1.4 подаётся от блока питания 12В 30А.
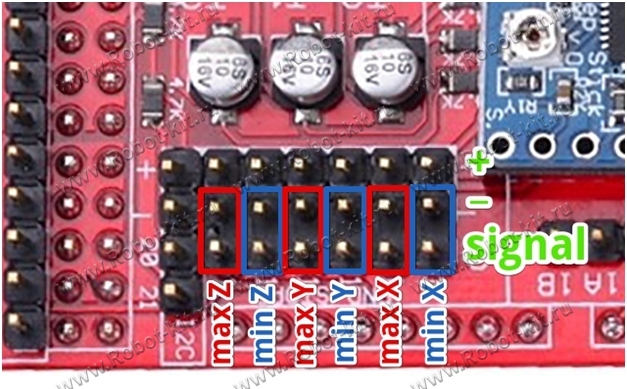
Подключение концевых выключателей
На плате ramps предусмотрено шесть разъемов для подключения концевых выключателей, их порядок следующий: X min, X max, Y min, Y max, Z min, Z max. Подключать концевики нужно соблюдая полярность. Если смотреть на разъемы концевиков со стороны разъемов питания RAMPS, то порядок пинов будет следующий: Signal, GND, +5 В.
Подключение термисторов RAMPS поддерживает три датчика температуры, разъемы для них подписаны — T0, T1, T2. В T0 подключают термистор хотэнда, а в T1 термистор нагревательного стола. Полярность у термисторов отсутствует. T2 служит для термистора второго хотэнда.

На плату могут быть установлены драйверы шаговых двигателей типа A4988 с минимальным микрошагом 1/16 или Drv8825 с минимальным микрошагом 1/32
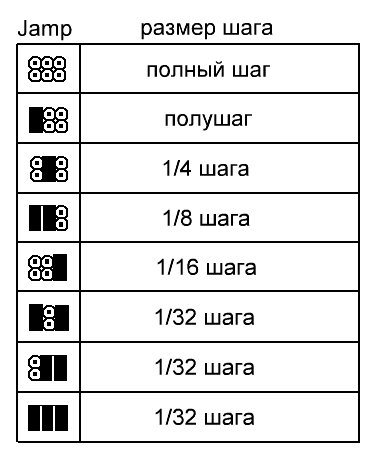
Прежде чем установить драйвера, необходимо выставить микрошаг драйвера, установив необходимую комбинацию джамперов, на разъеме, который находится под соответствующем драйвером.
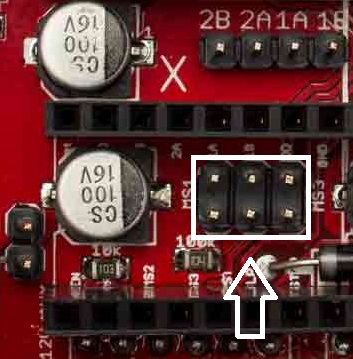
Если используется драйвер A4988, то расположение перемычки будет таким:

Если используется драйвер Drv8825, то расположение перемычки будет таким:
Подключение нагревательного стола и нагрева хотэнда
Разъемы для подключения нагревательных элементов обозначены D8, D9, D10. В D8 подключают нагревательный стол, а в D10 подключается нагрев хотэнда. В D9 подключают вентилятор для программной регулировки обдува печатающихся деталей, либо нагрев второго хотэнда (в зависимости от того, что указать в прошивке).
Подключение LCD дисплея
На плате Ramps есть специальный разъем для подключения дисплея, поэтому подключить любой LCD дисплей не составит труда.
Шилд Shield-RAMPS-1.4 — одна из самых распространённых плат для сборки 3D принтеров.

Эта «материнская» плата позволит Вам без проблем коммутировать все комплектующие воедино.
Управление шаговым двигателем с ПК

Привет всем! Решил продолжить тему с шаговыми двигателями и написать о своей последней разработочке. В общем задача полезна вдвойне. Я думаю что каждому человеку работающему с МК рано или поздно приходится как-то этот МК подключать к персональному компьютеру, то ли для передачи управляющего воздействия с ПК, то ли принимать какие-то данные с микропроцессорной системы. Вот и у меня задача была таковой: разработать стенд, который будет организовывать работу двух шаговых двигателей, а также получать данные о этом управлении с ПК.
Короче говоря вы вводите на компьютере данные о том какому из 2х двигателей в какую сторону и сколько вращаться, данные передаются в микропроцессорный стенд, а тот в свою очередь исполняет вашу команду.
Задача поставлена. Я разбил ее на две подзадачи: организация связи МК с ПК и сам драйвер для ШД. Ну как я делал драйвер описывается в моей предыдущей статье, так что осталось связать микроконтроллер (МК) с персональным компьютером (ПК), а потом связать все это дело в одном устройстве.
Итак связь МК с ПК. Я немного полистал даташит МК ATmega8 (это самый на мой взгляд популярный AVR микроконтроллер, я с ним работаю в основном) и понял, что самый простой и подходящий для меня это интерфейс RS232, по простому СОМ порт. Он есть на любом ПК, а для ноутбука я просто использовал переходник USB to COM. Да и практически на любом МК тоже есть аппаратная реализация этого интерфейса. Говоря проще чтобы на МК заработал СОМ порт нужно просто написать определенную программку и все будет ок. Кусочек необходимого для этой задачи кода на языке С представлена ниже
▼ com.rar 699 b ⇣ 185
Программа есть, остался вопрос аппаратной части реализации задачи. Дело в том что на выходе СОМ порта микроконтроллера 5 вольтовые импульсы, т.е. логическая 1 представляется в виде +5В, а логический 0 в виде 0В. А вот СОМ порт компьютера работает с +12В и -12В. Т.е. по сути необходимо согласовать уровни. Слава богу для этого есть хорошая микросхема MAX232 или ее китайский аналог. Даташит данной микросхемы представлен ниже
▼ max232.rar 635,11 Kb ⇣ 136
Данная микросхема подключается к МК и к ней подключается разъем RS232. Также имеется небольшая обвязка. Принципиальная схема ниже

Схема в Dip trace
▼ rs232.rar 3,67 Kb ⇣ 145
Все ваш МК подключен к компьютеру. Теперь я еще приделал два драйвера для ШД ко всей этой системе и написал программу с помощью которой можно управлять этими двумя движками.
Схема всего устройства с источником первичного питания для МК

Схема в Dip trace
▼ stend_2_shd.rar 9,53 Kb ⇣ 167
А теперь и код программы
▼ main.rar 1,07 Kb ⇣ 223
Программа написана на языке С в IAR (это отладчик+компилятор). Сразу приношу извинения за то, что программа практически без комментариев, но задавайте вопросы, все расскажу.
Система работает так: С ПК через гипертерминал например (виндошное приложение для отправки и получения инфы через СОМ порт) отправляете номер двигателя, например 1 или 2, а после этого колличество оборотов, после того как ШД прокрутится он пришлет на СОМ порт информацию о том что он сделал. Ну если что спрашивайте.

Чуть не забыл, печатная плата в Lay.
▼ shag_2_1.rar 31,38 Kb ⇣ 176
Камрад, рассмотри датагорские рекомендации
🌼 Полезные и проверенные железяки, можно брать
Опробовано в лаборатории редакции или читателями.
Одноканальное управление шаговым двигателем
Рубрика: Технические науки
Дата публикации: 27.01.2015 2015-01-27
Статья просмотрена: 1162 раза
Библиографическое описание:
Воробьев, Д. В. Одноканальное управление шаговым двигателем / Д. В. Воробьев, В. А. Трусов, И. И. Кочегаров, Н. В. Горячев. — Текст : непосредственный // Молодой ученый. — 2015. — № 3 (83). — С. 110-113. — URL: https://moluch.ru/archive/83/15245/ (дата обращения: 29.08.2021).
При конструировании механических узлов РЭС перед конструктором встает задача позиционирования различных узлов: перемещение считывающих головок, поворот антенн на определенный угол, перемещение узла экструдера 3D принтера в пространстве и так далее. Для выполнения этой задачи идеально подходят шаговые двигатели.
Шаговые двигатели имеют ряд преимуществ перед обычными двигателями постоянного тока:
— Угол поворота ротора определяется числом импульсов, которые поданы на двигатель.
— Прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3–5 % от величины шага. Эта ошибка не накапливается от шага к шагу.
— Возможность быстрого старта/остановки/реверсирования.
— Высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников.
— Возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора.
— Может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов.
Итак, перед нами стоит задача организовать одноканальное управление шаговым двигателем.
Выбор двигателя
Шаговые двигатели в зависимости от конфигурации обмоток подразделяются на биполярные, униполярные и четырехобмоточные. Биполярный двигатель имеет одну обмотку в каждой фазе, изменение магнитного поля в которых происходит за счет изменения направления тока. Это делает управляющую схему достаточно сложной. В униполярных двигателях так же по одной обмотке в каждой фазе, но от середины обмотки сделан отвод, что позволяет управлять двигателем при помощи последовательной коммутации полуобмоток. Четырехобмоточные шаговые двигатели имеют по две обмотки в каждой фазе и управляются последовательной коммутацией обмоток. Схема устройства шаговых двигателей показана на рисунке 1.
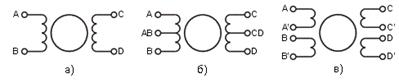
Рис. 1. Устройство шаговых двигателей: биполярный (А), униполярный (Б) и четырехобмоточные (В) шаговые двигатели
Выберем для решения нашей задачи униполярный шаговый двигатель, ввиду простоты его управления.
Управление шаговым двигателем
Задача управления униполярным шаговым двигателем состоит в формировании последовательности импульсов, коммутирующих обмотки через транзисторные ключи. Импульсы формируются при помощи унифицированного модуля Arduino в соответствии с данными, подаваемыми на него с ЭВМ или других блоков управления системой, в которой установлен шаговый двигатель. Схема включения шагового двигателя указана на рисунке 2.
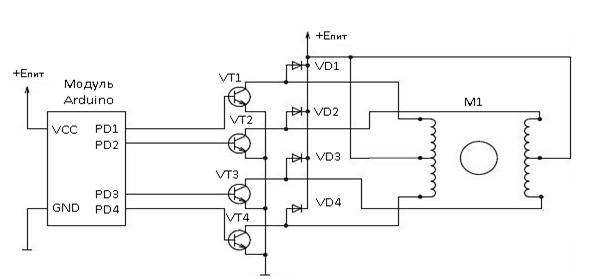
Рис. 2. Схема включения шагового двигателя
В данной схеме диоды VD1-VD4 используются для ускорения времени спада тока обмоток шагового двигателя. Питание подается на отводы обмоток, так как ток, получаемый на выходе модуля Arduino, сравнительно мал.
Шаговый двигатель может работать в шаговом или полушаговом режиме. В шаговом режиме за одну коммутацию двигатель поворачивается на один шаг, в полушаговом — на половину шага соответственно. Последовательности импульсов, формируемых модулем Arduino, указаны в таблице.
Последовательность управляющих импульсов для шагового (а) и полушагового (б) режимов
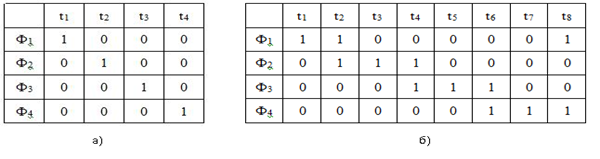
Для поворота двигателя в противоположную сторону управляющие импульсы подаются в обратной последовательности. Скорость поворота двигателя изменяется за счет изменения частоты управляющих импульсов.
Несмотря на все свои положительные стороны, шаговые двигатели имеют ряд недостатков:
— шаговым двигателем присуще явление резонанса;
— возможна потеря контроля положения ввиду работы без обратной связи;
— потребление энергии не уменьшается даже без нагрузки;
— затруднена работа на высоких скоростях;
— невысокая удельная мощность;
— относительно сложная схема управления.
Приведенные выше недостатки следует учитывать при применении шаговых двигателей в различных системах управления.
1. Андреев П. Г. Анализ программных пакетов моделирования влияния электромагнитных воздействий на изделия радиоэлектронных средств / П. Г. Андреев, С. А. Бростилов, Т. Ю. Бростилова, Н. В. Горячев, Г. П. Разживина, В. А. Трусов // Информационно-вычислительные технологии и математическое моделирование в решении задач строительства, техники, управления и образования: сб. статей. Междунар. научн.чтения– Пенза: ПГУАС, 2014. — C 126–130.
2. Бростилов С. А. Метрологический анализ измерительной подсистемы информационно-измерительной системы для исследования средств воздушного охлаждения / С.А Бростилов, Н. В. Горячев, Т. Ю. Бростилова // Труды международного симпозиума Надежность и качество. 2014. Т. 2. С. 127–129.
4. Шуваев П. В. Формирование структуры сложных многослойных печатных плат / П. В. Шуваев, В. А. Трусов, В. Я. Баннов, И. И. Кочегаров, В. Ф. Селиванов, Н. В. Горячев // Труды международного симпозиума Надежность и качество. 2013. Т. 1. С. 364–373.
5. Горячев Н. В. Подсистема расчета средств охлаждения радиоэлементов в интегрированной среде проектирования электроники / Н. В. Горячев, И. Д. Граб, А. А. Рыжов // Известия высших учебных заведений. Поволжский регион. Технические науки. 2010. № 4. С. 25–30.
6. Сивагина Ю. А. Разработка ретранслятора радиосигналов и его компьютерной модели / Ю. А. Сивагина, Н. В. Горячев, Н. К. Юрков, И. Д. Граб, В. Я. Баннов // Современные информационные технологии. 2013. № 17. С. 207–213.
7. Горячев Н. В. Концептуальная схема разработки систем охлаждения радиоэлементов в интегрированной среде проектирования электроники / Н. В. Горячев, Н. К. Юрков // Проектирование и технология электронных средств. 2009. № 2. С. 66–70.
8. Трифоненко И. М. Обзор систем сквозного проектирования печатных плат радиоэлектронных средств / И. М. Трифоненко, Н. В. Горячев, И. И. Кочегаров, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2012. Т. 1. С. 396–399.
9. Горячев Н. В. Тепловая модель учебной системы охлаждения / Н. В. Горячев, Д. Л. Петрянин // Прикаспийский журнал: управление и высокие технологии. 2014. № 2. С. 197–209.
10. Grab I. D., Sivagina U. A., Goryachev N. V., Yurkov N. K. Research methods of cooling systems. Innovative Information Technologies: Materials of the International scientific — рractical conference. Part 2. –M.: HSE, 2014, 443–446 pp.
11. Горячев Н. В. Уточнение тепловой модели сменного блока исследуемого объекта / Н. В. Горячев, И. Д. Граб, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2013. Т. 1. С. 169–171.
12. Горячев Н. В. Методика формирования контура печатной платы в САПР электроники с помощью сторонней механической САПР / Н. В. Горячев, Н. К. Юрков // Цифровые модели в проектировании и производстве РЭС. 2010. № 15. С. 127.
14. Горячев Н. В. Концептуальная структура СППР в области выбора теплоотвода электрорадиоэлемента / Н. В. Горячев // Труды международного симпозиума Надежность и качество. 2012. Т. 2. С. 241–241.
16. Горячев Н. В. Комплексы и системы теплофизического проектирования электронной аппаратуры / Н. В. Горячев, Ю. А. Сивагина, Е. А. Сидорова // Цифровые модели в проектировании и производстве РЭС. 2011. № 16. С. 178.
18. Горячев Н. В. Проектирование топологии односторонних печатных плат, содержащих проволочные или интегральные перемычки / Н. В. Горячев, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2011. Т. 2. С. 122–124.
20. Горячев Н. В. К вопросу реализации метода автоматизированного выбора системы охлаждения / Н. В. Горячев, И. И. Кочегаров, Н. К. Юрков // Алгоритмы, методы и системы обработки данных. 2013. № 3 (25). С. 16–20.
21. Меркульев А. Ю. Системы охлаждения полупроводниковых электрорадиоизделий / А. Ю. Меркульев, Н. В. Горячев, Н. К. Юрков // Молодой ученый. — 2013. — № 11. — С. 143–145.