ULN2003 драйвер нагрузок на 7 каналов, ULN2803 — на 8 каналов
ULN2003 драйвер нагрузок на 7 каналов, ULN2803 — на 8 каналов
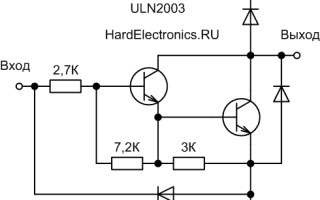
Схема одного из каналов в микросхемах ULN2003A, ULQ2003A и ULN2003AI.

Каждый из семи каналов содержит по два биполярных транзистора, резистор 2,7 кОм ограничивающий базовый ток, и два резистора на 7,2 кОм и 3 кОм защищающие транзисторы от открывания обратным током коллектора. Кроме того к схеме добавлены три защитных диода: первый защищает вход от отрицательного напряжения, два других защищают выход от отрицательного напряжения и от превышения напряжения на транзисторах выше питающего.
Наличие защитных выходных диодов актуально при работе на индуктивную нагрузку: диод для шунтирования обмотки реле или обмотки шагового двигателя уже встроен в микросхему и не нужно устанавливать внешний диод. А при использовании 7 каналов – 7 внешних диодов.





Arduino, шаговый двигатель 28-BYJ48 и драйвер ULN2003
Шаговый двигатель — это мотор, который управляется несколькими электромагнитными катушками.
На центральном валу — роторе — расположены магниты. В зависимости от от того, есть ток на катушках, которые находятся вокруг вала, или нет, создаются магнитные поля, которые притягивают или отталкивают магниты на роторе. В результате вал шагового двигателя вращается.
Подобная конструкция позволяет реализовать очень точное управление углом поворота ротора шагового двигателя относительно катушек — статора. Можно выделить два основных типа шаговых моторов: униполярные и биполярные шаговые двигатели.
В данной статье мы рассмотрим работу униполярного шагового двигателя 28-BYJ48 с драйвером ULN2003.

Униполярные шаговые двигатели имеют пять или шесть контактов для подключения и четыре электромагнитные катушки в корпусе (если быть более точными, то две катушки, разделенные на четыре). Центральные контакты катушек соединены вместе и используются для подачи питания на двигатель. Эти шаговые моторы называются униполярными, потому-что питание всегда подается на один из этих полюсов.
Управление ULN2003
Входная часть сборок ULN2003A, ULN2003AI, ULQ2003A спроектирована так чтобы работать совместно с ТТЛ и 3,3 В и 5 В К-МОП логикой.
ULN2002A создана для p-МОП логики. Во входных цепях ULN2002A добавлен стабилитрон на 7 В и увеличено сопротивление базового резистора до 10,5 кОм, благодаря этому сборка может работать с входными напряжениями от 14 до 25 В.

Сборка ULN2004A, ULQ2004A предназначена для К-МОП логики с уровнем напряжений от 6 до 15В. По сравнению с ULN2003, у ULN2004 просто увеличено сопротивление базового резистора до 10,5 кОм.

Как можно видеть на структурной схеме, входы и выходы расположены напротив друг друга, что весьма удобно при разводке печатной платы.

ULN2003 выпускается как для объемного монтажа: PDIP, так и для поверхностного: SOIC, SOP и TSSOP.
Спецификация и драйвер шагового двигателя
Существуют разные модели драйверов (контроллеров) шаговых двигателей. Среди них можно выделить самые популярные в DIY разработках на базе Arduino: L293, ULN2003, A3967SLB.
Как правило, шаговый двигатель 28-BYJ48 используют в паре с драйвером ULN2003.
Спецификацию шагового двигателя 28-BYJ48 на английском языке вы можете скачать здесь. Краткие выдержки основных технических характеристик приведены ниже:
- Напряжение питания: 5 В (постоянный ток);
- Количество фаз: 4;
- Количество шагов: 64;
- Угол поврота на один шаг: 5.625 градуса
- Частота: 100 Герц;
- Частота холостого хода по часовой стрелке: > 600 Герц;
- Частота холостого хода против часовой стрелки: > 1000 Герц;
- Крутящий момент > 34.3 миллиньютон на метр;
- Сопротивление вращению: 600-1200 грамм на сантиметр;
- Класс элетробезопасности: A;
Внешний вид и схемы подключения ULN2003 приведены на изображениях ниже
Примечание. Если вы захотите использовать плату L293 вместо ULN2003, красный контакт подключать не надо.

Аналоги ULN2003
Разные зарубежные производители выпускают свои аналоги ULN2003: L203, MC1413, SG2003, TD62003. Так же есть и отечественный аналог: К1109КТ22.
8-ми канальный драйвер нагрузки ULN2803A, ULN2804A
Для работы с микроконтроллерами может быть более удобнымы 8-ми канальные драйверы. И у семиканальных ULN2003, ULN2004 есть их восьмиканальные братья ULN2803, ULN2804.

Точно также как и ULN2003 — ULN2803 рассчитан на управление от ТТЛ-логики и низковольной К-МОП, а ULN2804 от К-МОП питающейся в диапазоне 6 .. 15 В. Отличия ULN280X от ULN200X только в дополнительном канале и 18-выводном корпусе. У ULN2803А есть отечественный аналог: К1109КТ63.
Работа с шаговым мотором 28BYJ-48 и драйвером ULN2003
Сегодня вы узнаете о четырехфазном шаговом двигателе 28BYJ-48, работающим от постоянного напряжения 5 Вольт. Также существует его модификация на 12 Вольт. Двигатель потребляет значительный ток, а это значит, что мы не можем подключить его напрямую к выводам Arduino. Воспользуемся для этого драйвером двигателя на микросхеме ULN2003.
Технические параметры двигателя 28BYJ-48
- Модель: 28BYJ-48
- Тип двигателя: Униполярный
- Напряжение питания: 5 Вольт, DC
- Количество фаз: 4
- Частота: 100 Гц
- Сопротивление: 50Ω ± 7% (при 25 ℃)
Общие сведения о движке
4-х фазный шаговый двигатель 28BYJ-48 — это бесколлекторный двигатель, имеющий дискретное перемещение (вращение вала осуществляется шагами). На роторе (валу), расположен магнит, а вокруг него находятся катушки. Подавая поочередно ток на эти катушки, создается магнитное поле, которое отталкивает или притягивает магнитный вал, заставляя двигатель вращаться. Такая конструкция позволяет с большой точностью управлять валом, относительно катушек. Принципиальная схема четырехфазного шагового двигателя 28BYJ-48 приведена ниже.
Двигатель называется четырех фазным, из-за того, что в нем содержится две обмотки, которые, в свою очередь, разделены на четыре. (Это отражено на схеме выше). Центральные отводы катушек подключены вместе и служат для питания двигателя. Так как каждая обмотка подключена к питанию, такие двигатели называют униполярными. На роторе 28BYJ-48 расположено 8 магнитов, с чередующимися полюсами (то есть, четыре магнита с двумя полюсами).
На рисунке видно, что внутри расположен редуктор, с примерным передаточным числом в 1:64, если быть точнее 1:63,68395. Это значит, что двигатель за один оборот осуществляет 4075.7728395 шага. Данный двигатель поддерживает полушаговый режим и за один полный оборот может совершать 4076 шага, а точнее за 1° делает примерно 11,32 шага. (4076 / 360 = 11,32).
Режимы работы двигателя:
Чаще всего, при использовании шагового двигателя 28BYJ 48, используют два режима подключения.
- Полушаговый режим — за 1 такт, ротор делает ½ шага.
- Полношаговый режим — за 1 такт, ротор делает 1 шаг.
Ниже представлены таблицы последовательности тактов:
Модуль управления шаговым двигателем ULN2003:
Цифровой вывод микроконтроллера выдает ток до
40 мА, а одна обмотка 28BYJ-48 в пике потребляет
320 мА, то есть, если подключить двигатель напрямую, микроконтроллер сгорит. Для защиты был разработан модуль шагового двигателя ULN2003, в котором используется микросхема ULN2003A (состоящая из 7 ключей), которая позволяет управлять нагрузкой до 500 мА (один ключ). Данный модуль может работать с 5 Вольтовым и 12 Вольтовым двигателем 28BYJ-48. Для переключения необходимо установить или убрать перемычку (по умолчанию перемычка установлена на питание 5 Вольт).
С принципиальной схемой модуля ULN2003 можно ознакомиться на рисунке ниже
- 1 — GND: «-» питание модуля
- 2 — Vcc: «+» питание модуля (5В или 12В)
- 3 — Vcc: «+» питание модуля (перемычка, только при 5В)
- 4 — Vcc: «+» питание модуля (перемычка, только при 5В)
Подключение шагового двигателя к Ардуино
Подключение будет рассмотрено на примере униполярного двигателя 28BYj-48 и драйверов L298 и ULN2003. В качестве платы будет использоваться Arduino Uno.

Подключение шагового двигателя к Ардуино
Еще один вариант схемы с использованием L298:

Подключение шагового двигателя к Ардуино на базе L298
Схема подключения на базе ULN2003 изображена на рисунке ниже. Управляющие выходы с драйвера IN1-IN4 подключаются к любым цифровым контактам на Ардуино. В данном случае используются цифровые контакты 8-11. Питание подключается к 5В. Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино.

Подключение шагового двигателя к Ардуино
Принципиальная схема подключения.

Принципиальная схема подключения шагового двигателя
Еще одна схема подключения биполярного шагового двигателя Nema17 через драйвер L298 выглядит следующим образом.
Обзор основных моделей шаговых двигателей для ардуино
Nema 17 – биполярный шаговый двигатель, который чаще всего используется в 3D принтерах и ЧПУ станках. Серия 170хHSхххА мотора является универсальной.
Основные характеристики двигателя:
- Угловой шаг 1,8°, то есть на 1 оборот приходится 200 шагов;
- Двигатель – двухфазный;
- Рабочие температуры от -20С до 85С;
- Номинальный ток 1,7А;
- Момент удержания 2,8 кг х см;
- Оснащен фланцем 42 мм для легкого и качественного монтажа;
- Высокий крутящий момент – 5,5 кг х см.
28BYJ-48 – униполярный шаговый двигатель. Используется в небольших проектах роботов, сервоприводных устройствах, радиоуправляемых приборах.
- Номинальное питание – 5В;
- 4-х фазный двигатель, 5 проводов;
- Число шагов: 64;
- Угол шага 5,625°;
- Скорость вращения: 15 оборотов в секунду
- Крутящий момент 450 г/сантиметр;
- Сопротивление постоянного тока 50Ω ± 7% (25 ℃).
Описание библиотеки для работы с шаговым двигателем
В среде разработки Ардуино IDE существует стандартная библиотека Strepper.h для написания программ шаговых двигателей. Основные функции в этой библиотеке:
- Stepper(количество шагов, номера контактов). Эта функция создает объект Stepper, которая соответствует подключенному к плате Ардуино двигателю. Аргумент – контакты на плате, к которым подключается двигатель, и количество шагов, которые совершаются для полного оборота вокруг своей оси. Информацию о количестве шагов можно посмотреть в документации к мотору. Вместо количества шагов может быть указан угол, который составляет один шаг. Для определения числа шагов, нужно разделить 360 градусов на это число.
- Set Speed(long rpms) – функция, в которой указывается скорость вращения. Аргументом является положительное целое число, в котором указано количество оборотов в минуту. Задается после функции Step().
- Step(Steps) –поворот на указанное количество шагов. Аргументом может быть либо положительное число – поворот двигателя по часовой стрелке, либо отрицательное – против часовой стрелки.
Шаговый двигатель – принцип работы
Шаговый двигатель – это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора. Также в шаговых двигателях имеется возможность быстрого старта, остановки, реверса.
Шаговый двигатель обеспечивает вращения ротора на заданный угол при соответствующем управляющем сигнале. Благодаря этому можно контролировать положение узлов механизмов и выходить в заданную позицию. Работа двигателя осуществляется следующим образом – в центральном вале имеется ряд магнитов и несколько катушек. При подаче питания создается магнитное поле, которое воздействует на магниты и заставляет вал вращаться. Такие параметры как угол поворота (шаги), направление движения задаются в программе для микроконтроллера.
Упрощенные анимированные схемы работы шагового двигателя
Основные виды шаговых моторов:
- Двигатели с переменными магнитами (применяются довольно редко);
- Двигатели с постоянными магнитами;
- Гибридные двигатели (более сложные в изготовлении, стоят дороже, но являются самым распространенным видом шаговых двигателей).
Драйвер шагового двигателя и двигателя постоянного тока L298N и Arduino
Модуль L298N H-bridge можно использовать для двигателей, напряжение питания которых находится в диапазоне от 5 до 35 вольт.
Кроме того, на многих подобных платах есть встроенный 5В регулятор, который дает возможность запитывать ваши устройства.
Подключение модуля L298N
Прежде чем перейти к управлению двигателем постоянного тока и шаговым двигателем, разберемся с подключением модуля L298N (даташит, техническая информация от производителя).
Ссылки для заказа необходимого оборудования из Китая
- КУПИТЬ цифровой датчик температуры DS18B20;
- КУПИТЬ Arduino Uno R3;

Ниже приведены разъяснения к рисунку.
- Для двигателя постоянного тока 1 “+” или для шагового двигателя A+
- Для двигателя постоянного тока 1 “-” или для шагового двигателя A-
- Коннектор на 12 вольт. Снимите его, если используете напряжение питания больше 12 вольт.
- Питания вашего двигателя обеспечивается с этого выхода. Максимальное напряжение питания постоянным током 35 вольт. Если напряжение больше 12 вольт, разомкните контакты на 3 коннекторе.
- GND — земля.
- Питание 5 вольт, если коннектор на 12 вольт замкнут. Идеально для питания Arduino и т.п.
- Коннектор для двигателя постоянного тока 1. Можно подключить к ШИМ-выходу для управления скоростью двигателя постоянного тока.
- IN1.
- IN2.
- IN3.
- IN4.
- Коннектор для двигателя постоянного тока 2. В случае использования шагового двигателя, подключать сюда ничего не надо. Можно подключить к ШИМ-выходу для управления скоростью двигателя постоянного тока.
- Двигатель постоянного тока 2 “+” или шаговый двигатель B+.
- Двигатель постоянного тока 2 “-” или шаговый двигатель B-.

L298N, Arduino и двигатель постоянного тока
Данный модуль дает возможность управлять одним или двумя двигателями постоянного тока. Для начала, подключите двигатели к пинам A и B на контроллере L298N.
Если вы используете в проекте несколько двигателей, убедитесь, что у них выдержана одинаковая полярность при подключении. Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Поверьте, с точки зрения программирования Arduino это неудобно.
После этого подключите источник питания. Плюс — к четвертому пину на L298N, минус (GND) — к 5 пину. Если ваш источник питания до 12 вольт, коннектор, отмеченный 3 на рисунке выше, можно оставить. При этом будет возможность использовать 5 вольтовый пин 6 с модуля.
Данный пин можно использовать для питания Arduino. При этом не забудьте подключить пин GND с микроконтроллера к 5 пину на L298N для замыкания цепи. Теперь вам понадобится 6 цифровых пинов на Arduino. Причем некоторые пины должны поддерживать ШИМ-модуляцию.
ШИМ-пины обозначены знаком “
” рядом с порядковым номером.
Теперь подключите цифровые пины Arduino к драйверу. В нашем примере два двигателя постоянного тока, так что цифровые пины D9, D8, D7 и D6 будут подключены к пинам IN1, IN2, IN3 и IN4 соответственно. После этого подключите пин D10 к пину 7 на L298N (предварительно убрав коннектор) и D5 к пину 12 (опять таки, убрав коннектор).
Направление вращения ротора двигателя управляется сигналами HIGH или LOW на каждый привод (или канал). Например, для первого мотора, HIGH на IN1 и LOW на IN2 обеспечит вращение в одном направлении, а LOW и HIGH заставит вращаться в противоположную сторону.
При этом двигатели не будут вращаться, пока не будет сигнала HIGH на пине 7 для первого двигателя или на 12 пине для второго. Остановить их вращение можно подачей сигнала LOW на те же указанные выше пины. Для управления скоростью вращения используется ШИМ-сигнал.
Скетч приведенный ниже, отрабатывает в соответствии со схемой подключения, которую мы рассматривали выше. Двигатели постоянного тока и Arduino питаются от внешнего источника питания.
// подключите пины контроллера к цифровым пинам Arduino
Шаговый Двигатель Схема Подключения
Формирование импульсов отводится микроконтроллерам например Arduino.

В одном 8 выводном корпусе SOIC-8 размещены 2 транзистора. 
Путь для повышения магнитного поля — это увеличение тока или числа витков обмоток.
Управление биполярным шаговым двигателем
Двигатели с 4 обмотками имеют преимущество в том, что вы можете подключить обмотки любым удобным для вас образом и получить как биполярный, так и униполярный двигатель. 
Например, двигатели с дисковым намагниченным ротором. Полушаговое управление интересно тем, что становится возможным более точное позиционирование вала двигателя, благодаря к тому, что к целым шагам добавляются еще и половинки это достигается совмещение предыдущих двух режимов работы, а обмотки чередуются, то включаясь попарно, то по одной. 
У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. Оба сигнала имеют логические уровни и, если для их формирования используются выходы с открытым коллектором, то потребуются соответствующие резисторы подтяжки на Рисунке 10 они не показаны. 
Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. 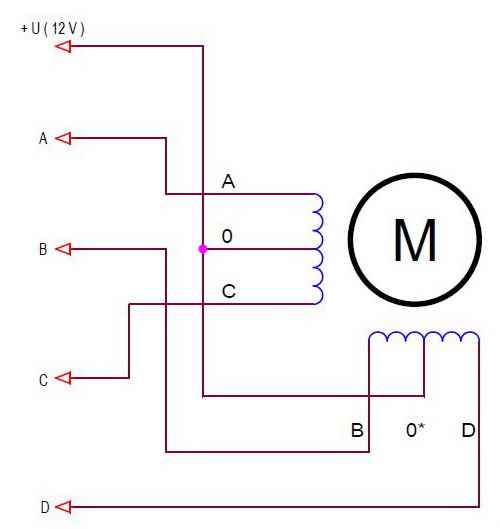
Зависимость момента от скорости, влияние нагрузки Момент, создаваемый шаговым двигателем, зависит от нескольких факторов: скорости. Причиной этого является фильтрующее действие инерции ротора и нагрузки. 
Управление шаговым двигателем
Сморите видео
Несмотря на то, что драйвер, обеспечивающий микрошаговый режим, намного сложнее обычного драйвера, всё равно система может оказаться более простой и дешевой, чем шаговый двигатель, плюс редуктор. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полная схема, приведенная в [ 10 ] и многократно повторенная на интернет-сайтах, пригодна для использования в качестве тестовой платы. С помощью подстроечного резистора видно на правом фото можно задавать выходной ток. 
Схема содержит описанный ранее двунаправленный двухфазовый формирователь на D-триггерах Рисунок 
Современные микроконтроллеры иногда имеют встроенные ЦАПы, которые можно использовать для реализации микрошагового режима взамен специальных контроллеров. 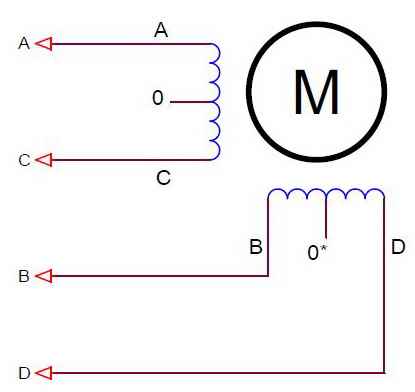
Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал. 
Соответственно, в режиме удержания поскольку используются 8 разрядов ЦАП , максимальный ток составит 1 А. При этом используется номинальное число шагов. 
Синусоидальный ток фаз может быть обеспечен применением специальных драйверов. 
Это означает, что в таком режиме не может быть получен полный момент. Внутри находятся полюсные наконечники в виде ламелей.
Шаговый двигатель БЕЗ ДРАЙВЕРА!
Виды шаговых двигателей по типу ротора:
После этого ротор повернется и будет стараться принять одно из следующих положений равновесия. Для устранения колебаний момента при работе двигателя в полушаговом режиме можно снижать ток в те моменты, когда включены две фазы. 
Соответственно, в режиме удержания поскольку используются 8 разрядов ЦАП , максимальный ток составит 1 А. 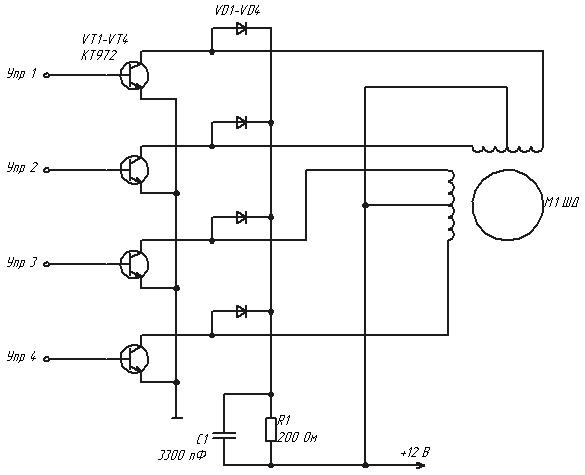
Упрощенная схема коммутатора шагового двигателя без реверса. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть необходимо закладываться на номинальный ток схемы питания, равный удвоенному максимальному току обмоток при выбранном напряжении питания. Из-за этих ограничений микрошаговый режим используется в основном для обеспечения плавного вращения особенно на очень низких скоростях , для устранения шума и явления резонанса. 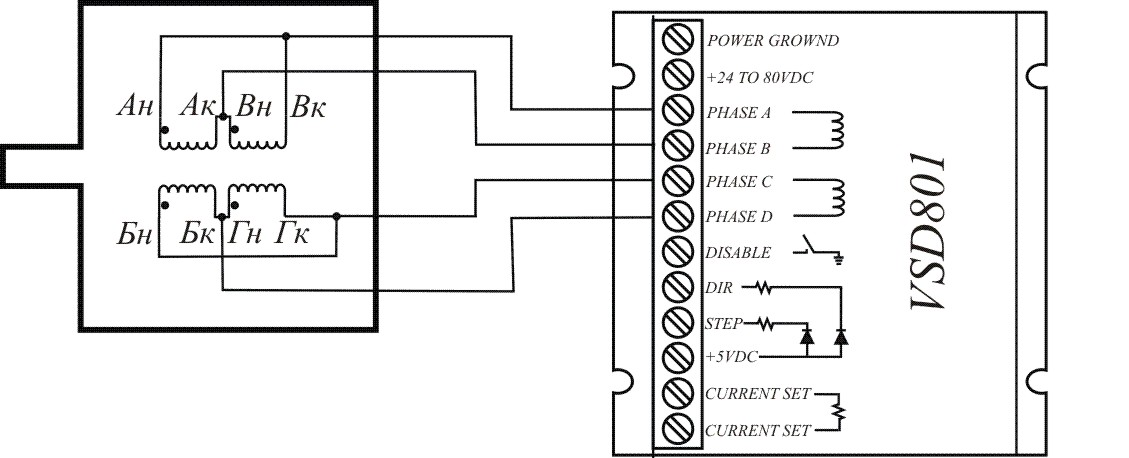
Зависимость момента от угла поворота ротора для двух запитанных обмоток. Обычно у них четыре вывода, две обмотки. 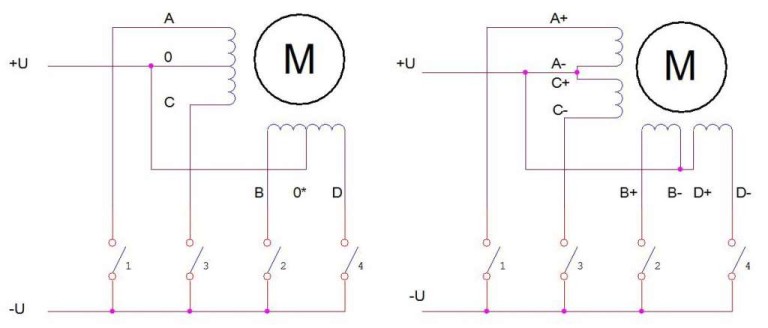
В полношаговом режиме с двумя включенными фазами положения точек равновесия ротора смещены на пол-шага. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов рис.

Назначение этих диодов — гасить ЭДС самоиндукции, возникающую при выключении управляющих ключей. При включени тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно.
Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Но такой ток от микросхем серии 74HCхх забрать невозможно, поэтому потребуются дополнительные драйверы.
Обеспечивает паспортное значение электрических характеристик. Драйверы делятся на две категории: Повторяющие форму сигналов. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Магнитный гистерезис приводит к тому, что магнитный поток зависит не только от тока обмоток, но и от предыдущего его значения. С точки зрения автора статьи, самым оптимальным для управления коммутацией обмоток двигателей небольшой мощности является использование подходящих по току и сопротивлению открытого канала RDC ON MOSFET, но с учетом рекомендаций, описанных выше.
Шаговый двигатель. Micro Step Driver. PLC Omron. Подключение,программирование. (Часть 1)
Технические характеристики A4988
Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Можно увеличить количество шагов в 16, 32, 64 раза и т.
Поддержка такого режима для указанного драйвера осуществляется микропроцессором, управляющим входами ЦАП. Таким образом, выполняется один шаг.
Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки. Режим управления двигателем задается коммутатором. Шаговые двигатели.
Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление — соответственно вдвое меньше. Так, пожалуй, можно дать строгое определение. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки.
Общие сведения:
Микрошаговый режим. Режим удержания уменьшает максимальный ток, потребляемый обмотками двигателя, с двух до одного ампера. Диаграммы, диаграммы
В пределе, шаговый двигатель может работать как синхронный электродвигатель в режиме непрерывного вращения. Схема контроллера униполярного шагового двигателя с драйвером на биполярных транзисторах. Описание библиотеки для работы с шаговым двигателем В среде разработки Ардуино IDE существует стандартная библиотека Strepper. Гибридный двигатель.
Обзор копеечной платы управления шаговым двигателем.
Драйвер для 3-фазного шаговика
Тема раздела Драйверы и контроллеры для CNC в категории Станки ЧПУ, Hobby CNC, инструмент; Помогите определиться какую схему использовать для 3-фазного шагового двигателя. Параметры двигателя (фото прилагаю) 4 вывода включен в звезду с выводом .
Опции темы
- Версия для печати
- Отправить по электронной почте…
- Подписаться на эту тему…
Драйвер для 3-фазного шаговика
Помогите определиться какую схему использовать для 3-фазного шагового двигателя.
Параметры двигателя (фото прилагаю) 4 вывода включен в звезду с выводом от центра.
Сопротивление каждой обмотки 2,2 ома.На сайте производителя JAPAN SERVO описния нет
наверное потому что старый 1972 год. Может есть микросхема для управления 3-фазным шаговым двигателем. есть плата с того же аппарата что и двигатель там выходные ключи на мощных транзисторах 2N6058(дарлингтона) остальная обвязка сильно накрученая на микросхемах SN74..
серии.Посоветуйте.

SI-7600 — a control IC used with power MOSFET array to drive a 3-phase stepper motor.
Только, боюсь, радости от этого мало — ее еще найти надо (если продолжают выпускать).
Сделать самому !
пиши на майл помогу !
Валяется статор от автомобильного генератора 24в. Не поленился подсчитать 18полюсов, это 6 шагов на оборот и12 в полу шаге, внутренний Ф87мм., внешний Ф132мм., ширина набора 27мм., ширина с обмоткой 47мм. Если такарка на халяву, можно ротор из магнита от динамика мощного, два краба и немагнитная ось. Если крышки переточить, то вся толщина 50-60мм мотора. А с фрезером можно в каждом полюсе прорезь, уже 24 в полушаге. Для строптивых, можно в перемотке упражняться.
Грубая сила.
Почему замолчали . Помогите со схемой.
Давай алгоритм управления, а я подумаю как его оживить !
Двигателя будут использоватся 3-х кординатном фрезерном станке.
Алгоритм такой же как и для обычных программ управления.
Только я непойму при чем здесь автомобильный генератор.
Если это будет так выглядеть
Последний раз редактировалось STEPMOTOR; 04.04.2009 в 13:51 .
Если это будет так выглядеть
Сделал схему в принципе работает но пропускает много шагов а бывает при подачи одного импульса
делает несколько шагов.Как сэтим боротся.транзисторы мощные полевые SMD использую от материнок И можно при использовании одного контроллера управлять
двумя двигателями X Y ИЛИ ставить надо 2 пика
Ок !
Проверю прошивку выложу завтра.
+ добавлю в прошивку управление вторым движком !
Прошивка c добавленной второй осью и исправлениями :Вложение 35571
Схему чето ни в каком виде добавить немогу , форум глючит !
попозже попробую.
Последний раз редактировалось STEPMOTOR; 04.04.2009 в 13:51 .
Прошивка c добавленной второй осью и исправлениями :Вложение 35571
Схему чето ни в каком виде добавить немогу , форум глючит !
попозже попробую.
Схема открылась а прошивку не могу взять выложи еще раз или отправ пожалуйста на e-mel
wowikpi@rambler.ru
и мне плиз.
oldabrikos@hotbox.ru

Народ, а нельзя ли перепрошить какой нибудь обычный контроллер безколлекторника?
у них там вроде атмеги стоят?
т.е. просто чтоб внаглую, без обратной связи.
там же и схема и техника вся уже отработана.
Посмотрите мой вариант схемы управления трех-фазным униполярным шаговым двигателем. За основу взята схема управления шести-фазным шаговым двигателем ШД-5 из журнала «Радио». Управление сигналами Step/Dir. Схема разрабатывалась для различных экспериментов с шаговыми двигателями. К ней можно подключить шаговые двигатели как трех-фаные, так и четырех- и шести-фазные. Возможно управление двигателем через СОМ порт или даже двумя трех-фаными двигателями. В приложении кроме схемы, платы есть прошивка для управления трех-фазным двигателем. Схема проверена с двигателем SM-024-0035-TG и двигателем ШД-5 (шестифазным в режиме трехфазного). В программе регулировка тока пока не реализована. Поэтому для питания двигателей на контакт Х1-4 подаю 5В, чтобы не попалить транзисторы и не перегревать двигатель. Да и при питании от 12В вырубается источник питания ( я использовал компьютерный). Ток через двигатель 1.3А и 4.5А для моих двигателей. Интересно а какие трех-фазные двигатели применяете вы. Я чаще всего встречал четырех-фазные. Чуть не забыл написать про подключение двигателя. Общий провод двигателя к Х3-2, три фазы к Х3-8, Х3-7 и Х3-6
Вот еще один вариант прошивки для управления трехфазным двигателем. Теперь в микрошаговом режиме. Дробление шага 1/4 за счет ШИМ. Возможно и другое дробление шага. Подключение двигателя немного другое. Общий провод двигателя к Х3-2, три фазы к Х3-4, Х3-5 и Х3-6. По плану сделать уменьшение тока при простое двигателя, настройка под параметры двигателя не в прошивке, а через СОМ порт. А также управление четырехфазным двигателем в микрошаговом режиме, но для этого нужно переделывать схему.
Прошивка что-то не присоеденилась.