Шаговые двигатели: виды, принцип работы, система управления
Шаговые двигатели: виды, принцип работы, система управления
Шаговые двигатели широко используются в бытовых приборах, транспортных средствах, фрезерных и шлифовальных станках и других производственных механизмах. Устройство представляет собой движок постоянного тока, один оборот которого разделен на несколько одинаковых шагов (это обеспечивается благодаря контроллеру). Главное его отличие от моторов других типов – отсутствие щеточного механизма. Шаговый двигатель оснащен блоком управления (приборной панелью), передатчиками и сигнализаторами.
Как работает шаговый электродвигатель
Зная принцип работы шагового двигателя, вы сможете самостоятельно установить его или произвести ремонт. Он функционирует следующим образом:
- После подачи напряжения на клеммы начинается непрерывное вращение специальных щеток. Входные импульсы устанавливают ведущий вал в положение, которое заранее определено.
- Под воздействием импульсов вал перемещается под фиксированным углом.
- Внешняя цепь управления, чаще всего представленная микроконтроллером, возбуждает электромагниты зубчатого типа. Один из них (тот, к которому приложена энергия) притягивает к себе зубья шестерни, вследствие чего вал движка делает поворот.
- Будучи выровнены по отношению к ведущему электромагниту, остальные магниты смещаются по направлению к следующей магнитной детали.
- Вращение шестеренки обеспечивается отключением первого электромагнита и включением следующего.
- Шестеренка выравнивается по отношению к предыдущему колесу, после чего весь процесс повторяется столько раз, сколько необходимо.
Данные вращения являются постоянным шагом. Для определения скорости мотора нужно подсчитать количество шагов, требуемых для его полного оборота. Точность работы обеспечивается благодаря микропроцессорным системам управления шаговых двигателей.
Виды шаговых двигателей
Существует несколько разных моделей шаговых двигателей. Если конструкция устройства предусматривает наличие постоянного магнита, принцип работы основан на притяжении или отталкивании статором и ротором электромагнитного мотора. В переменно-шаговом движке ротор изготавливается из железа. Минимально допустимое отталкивание в нем происходит при наименьшем зазоре, что обеспечивает притяжение точек ротора к полюсам магнитного статора. В механизмах гибридного типа оба вышеприведенных принципа сочетаются и дополняют друг друга. Из-за сложности конструкции и изготовления такие приборы стоят дороже, чем остальные модели.
Чаще всего в быту и на производстве применяются двухфазные шаговые двигатели. В зависимости от типа обмотки электромагнитных катушек они подразделяются на:
- униполярные;
- биполярные.
Механизмы первого типа оснащены одной обмоткой. Каждая фаза определяется центральным магнитным краном. При включении определенной секции обмотки обеспечивается нужное направление магнитного поля. Такая конструкция предусматривает работу магнитного полюса без дополнительного переключения, что обеспечивает предельно простую коммутацию цепи, равно как и направления тока. Для работы движка (с учетом фазного переключения) обычно достаточно трех проводов на фазу и шести для выходного сигнала. Микроконтроллер используется для активирования транзистора в нужной последовательности (она определяется программой).
Для подключения обмоток соединительные провода должны прикасаться к постоянным магнитам двигателя. При соединении клемм катушки вал проворачивается с трудом. Поскольку общий провод длиннее, чем провод, соединяющий катушки, сопротивление между торцами проводов и торцами катушек в два раза больше сопротивления между торцом катушки и общим проводом.
В механизмах второго типа есть только одна фазовая обмотка. Управляющая схема такого движка обычно сложнее, так как ток в обмотку поступает при помощи магнитного полюса переломным образом. Два провода на фазу не являются общими.
Трехфазный шаговый двигатель устанавливается на фрезерных станках с ЧПУ, запускаемых с компьютера, и транспортных средствах, в которых используется дроссельная заслонка.
Подключение шагового двигателя
Выбор схемы подключения шагового двигателя зависит от:
- количества проводов в приводе;
- способа запуска механизма.
Существующие модели движков имеют 4, 5, 6 или 8 проводов. Прибор с четырьмя проводами можно подключать только к биполярным устройствам. Он оснащен двумя фазными обмотками, каждая из которых имеет два провода. Для пошагового подключения драйвера необходимо определить пары проводов с непрерывной связью с помощью метра.
В механизме с шестью проводами каждая обмотка имеет два провода и центральный кран. Движки этой модели характеризуются высокой мощностью и подключаются как к биполярным, так и к однополярным исполнительным устройствам. В первом случае используется один центр-кран каждой обмотки и один конец провода. Во втором случае используются все шесть проводов. Разделение провода осуществляется с помощью измерительного прибора.
Отличие пятипроводного мотора от шестипроводной модели заключается в том, что соединение центральных клемм представляет собой сплошной кабель, который выходит к центральному проводу. Поскольку отделение одной обмотки от другой без разрывов не представляется возможным, необходимо определить центр провода, после чего соединять его с другими проводниками. Это будет самым безопасным и максимально эффективным решением. Затем движок подключается к сети и проводится проверка его работоспособности.
Для успешной эксплуатации механизма нужно иметь в виду следующие нюансы:
- Номинальное напряжение производится первичной обмоткой при постоянном токе.
- Изменение начальной скорости крутящего момента прямо пропорционально изменению тока.
- Скорость понижения линейного момента на последующих высоких скоростях зависит от индуктивности обмоток и схемы привода.
Благодаря высокой степени защиты шаговые двигатели успешно работают в тяжелых условиях.
Принцип работы шагового двигателя
Каким образом роботизированный манипулятор на предприятии повторяет одни и те же движения снова и снова? Как автоматический фрезерный станок может двигаться с такой точностью? Это возможно благодаря шаговому двигателю. Особенность шагового двигателя заключается в том, что он может контролировать угловое положение ротора без замкнутого контура обратной связи, это простая и точная разомкнутая система.
p, blockquote 1,0,0,0,0 —>

p, blockquote 2,0,0,0,0 —>
Как работает шаговый двигатель с переменным магнитным сопротивлением
Для начала давайте разберемся, как работает шаговый двигатель с переменным магнитным сопротивлением, который является самым простым. Позднее мы рассмотрим устройство высокоточного и широко используемого типа двигателя. У этого двигателя 6 зубьев на статоре, которые могут быть запитаны от трех отдельных источников постоянного тока.
p, blockquote 3,0,0,0,0 —>

p, blockquote 4,0,0,0,0 —>
Ротор состоит из ряда стальных пластин. У него отличное от статора количество зубьев в данном случае их 4 это сделано намеренно, для того чтобы только одна пара зубьев ротора могла одновременно находиться напротив зубьев статора.
p, blockquote 5,0,0,0,0 —>

p, blockquote 6,0,0,0,0 —>
Вы и сами можете объяснить, как работает этот шаговый двигатель. Если обесточить обмотку A и запитать обмотку B станет ясно, что ротор будет двигаться, как показано на модели.
p, blockquote 7,0,0,0,0 —>

p, blockquote 8,0,1,0,0 —>
Из уроков геометрии понятно, что один шаг соответствует 30 градусам. Чтобы перейти к следующему шагу обесточим обмотку B и запитаем обмотку C.
p, blockquote 9,0,0,0,0 —>

p, blockquote 10,0,0,0,0 —>
После этого вновь запитаем обмотку A. То есть ротор занимает позицию с наименьшим сопротивлением.
p, blockquote 11,0,0,0,0 —>

p, blockquote 12,0,0,0,0 —>
Размер шага двигателя составляет 30 градусов, точность может быть доведена до 15 градусов при помощи одного простого приема, когда запитана обмотка A, ротор находится в таком положении мы знаем, что если запитать обмотку B он повернется на 30 градусов. Но что произойдет если обмотки A и B будут запитаны одновременно? Ротор займет положение между двумя этими обмотками, то есть повернется на 15 градусов.
p, blockquote 13,0,0,0,0 —>

p, blockquote 14,0,0,0,0 —>
После этого обесточим А. Когда ротор установится напротив обмотки B, запитаем обмотку С, такой тип работы называется режимом дробления шага.
p, blockquote 15,0,0,0,0 —>

p, blockquote 16,1,0,0,0 —>
Как работает гибридный шаговый двигатель
Двигатель который мы рассматривали, называется двигателем с переменным магнитным сопротивлением. Наиболее универсальными и широко распространенными являются гибридные шаговые двигатели. Рассмотрим работу стандартного гибридного двигателя с величиной шага в 1.8 градуса.
p, blockquote 17,0,0,0,0 —>

p, blockquote 18,0,0,0,0 —>
Гибридный двигатель имеет намагниченный по оси ротор со стальными зубчатыми наконечниками. Таким образом, одна сторона ротора является северным магнитным полюсом, а другая южным.
p, blockquote 19,0,0,0,0 —>

p, blockquote 20,0,0,0,0 —>
Точность данного двигателя заключается в продуманном расположении зубьев ротора и статора. Разберемся, как это работает. Ротор имеет 50 зубьев, чтобы понять, как расположены зубья статора для начала, предположим, что у статора тоже 50 зубьев. Однако на самом деле их на 2 меньше, чем у ротора. Таким образом у статор остается 48 зубьев.
p, blockquote 21,0,0,0,0 —>

p, blockquote 22,0,0,0,0 —>
Давайте разделим их на 4 группы попарно, как показано на модели (подробнее смотри на видео).
p, blockquote 23,0,0,0,0 —>
p, blockquote 24,0,0,1,0 —>
Теперь давайте выровняем эти группы, зеленая группа сдвигается так что она оказывается наполовину выровнены с зубьями ротора. Зубья желтой группы полностью смещены относительно зубьев ротора. Синяя группа наполовину выровнена относительно зубьев ротора. Красная группа остается на своем месте, то есть красная группа зубьев полностью выровнена с ротором, а желтая группа смещена. Две другие группы смещены лишь наполовину.
p, blockquote 25,0,0,0,0 —>

p, blockquote 26,0,0,0,0 —>
Следует помнить, что сторона ротора направленная к нам является южным магнитным полюсом. Обмотки статора соединяются следующим образом, они представляют собой две независимые группы обмоток. При подаче питания на обмотку A, статор образует следующую картину намагниченности. Одна пара полюсов статора действует как северный полюс, а другая как южный. Так как противоположные полюса притягиваются, они будут совмещены, полюса с одинаковой полярностью будут смещены.
p, blockquote 27,0,0,0,0 —>

p, blockquote 28,0,0,0,0 —>
Смотрите, что произойдет с ротором при подаче питания на обмотку B, он совершит вращение на небольшой угол чтобы вы равняться с новым северным полюсом. Очевидно, что этот угол составляет одну четвертую часть углового шага. Другими словами, ротор поворачивается на 1,8 градуса, затем задействуется обмотка A с противоположной полярностью и вновь ротор поворачивается на одну целую восемь десятых градуса.
p, blockquote 29,0,0,0,0 —>

p, blockquote 30,0,0,0,0 —>
Данный процесс повторяется и двигатель совершает высокоточные движения. Разрешение угла шага может быть улучшено при помощи дробления шага. Интересно отметить, что северные зубчатые наконечники находятся между южными зубчатыми наконечниками, таким образом гарантируется выравнивание полюсов с противоположными полярностями.
p, blockquote 31,0,0,0,0 —> p, blockquote 32,0,0,0,1 —>
Вот так работает гибридный шаговый двигатель, такие двигатели идеально подходят для применения в областях, где необходимы четкие движения и простое управление.
Принцип работы и разновидности биполярного шагового двигателя
 Практически все электрические приборы функционируют с помощью приводных механизмов. Они могут иметь различное строение и принцип работы, а также особенности настраивания. Существуют разные типы таких приспособлений. Одним из наиболее востребованных и доступных по цене считается биполярный шаговый двигатель, благодаря которому можно обеспечить реализацию систем точного позиционирования.
Практически все электрические приборы функционируют с помощью приводных механизмов. Они могут иметь различное строение и принцип работы, а также особенности настраивания. Существуют разные типы таких приспособлений. Одним из наиболее востребованных и доступных по цене считается биполярный шаговый двигатель, благодаря которому можно обеспечить реализацию систем точного позиционирования.
- Общие сведения
- Принцип работы
- Основные режимы
- Разновидности приспособления
- Прибор с переменными магнитами
- Гибридные модели
- Двухфазные моторы
- Другие типы устройств
Общие сведения
 Существует две разновидности приспособления: униполярный шаговый двигатель и биполярный. Устройство представляет собой синхронный бесщеточный электродвигатель, имеющий одну или несколько обмоток. Ток, который подается на обмотки статора, вызывает фиксацию ротора, благодаря чему осуществляются его дискретные угловые перемещения или шаги.
Существует две разновидности приспособления: униполярный шаговый двигатель и биполярный. Устройство представляет собой синхронный бесщеточный электродвигатель, имеющий одну или несколько обмоток. Ток, который подается на обмотки статора, вызывает фиксацию ротора, благодаря чему осуществляются его дискретные угловые перемещения или шаги.
Первые модели таких приспособлений появились еще в 30-е годы XIX века и представляли собой своеобразный магнит, приводящий в движение храповое колесо. Во время включения оно перемещалось на величину зубцового шага. Раньше механизм использовался на кораблях военного флота Великобритании с целью перемещения торпед в нужную сторону.
Через несколько лет и армия США переняла это приспособление и стала активно применять его в своих военных кораблях и других механизмах. В 1919 году шотландец Уолкер получил патент на двигатель с ротором.
В настоящее время подобные механизмы востребованы и часто применяются. Шаговый мотор используется для обеспечения бесперебойного функционирования шлифовального и фрезерного станков, различных бытовых приборов, производственных механизмов и транспорта, а также жестких дисков персональных компьютеров. Именно поэтому он так востребован. Устройство состоит из нескольких частей:

 контролер, предназначенный для регулирования работы шагового привода;
контролер, предназначенный для регулирования работы шагового привода;- специальные магнитные части;
- обмотки;
- панель, выполняющая роль блока управления;
- сигнализаторы и передатчики, благодаря которым работа устройства отлаженная и бесперебойная.
Биполярные двигатели имеют только одну обмотку в одной фазе, тогда как униполярные содержат две. Первые считаются более сложными в управлении, но обеспечивают плавную работу устройства.
Принцип работы
 Шаговый двигатель работает по простым принципам. Первый этап — приложение напряжения к клеммам. Благодаря этому щетки на самом устройстве начинают постоянно двигаться. Двигатель холостого хода имеет свойство преобразовывать входящие импульсы.
Шаговый двигатель работает по простым принципам. Первый этап — приложение напряжения к клеммам. Благодаря этому щетки на самом устройстве начинают постоянно двигаться. Двигатель холостого хода имеет свойство преобразовывать входящие импульсы.
Эти импульсы имеют прямоугольную направленность и преображение идет в заранее определенное положение ведущего вала, который к нему приложен. Вследствие этого вал перемещается под определенным углом. Оснащенные подобным редуктором приспособления довольно эффективны и надежны при условии наличия нескольких электромагнитов. Находиться они должны вокруг центральной детали из железа, имеющей зубчатую форму.
Внешняя цепь, отвечающая за управление, подает сигнал к магниту. При возникновении необходимости повернуть вал в ту или иную сторону тот электромагнит, на который был послан импульс, начинает быстро притягивать к себе зубья колеса. Они постепенно выравниваются с этим элементом, но смещаются по отношению к другим магнитным частям приспособления.
После выключения первого электромагнита включается второй и начинается беспрерывное движение шестеренки. Благодаря этому деталь выравнивается с предыдущим колесом. Такой цикл повторяется необходимое количество раз. Каждый из них и называется постоянным шагом. Именно поэтому двигатель получил такое название. Вычислить скорость его работы можно с помощью подсчета шагов, которые необходимы для обеспечения полного цикла.
Контролировать работу приспособления можно с помощью специального драйвера. Обычно это необходимо в случае настраивания станка или ветрогенератора.
Основные режимы
Изделие функционирует в нескольких режимах, которые предварительно настраиваются в зависимости от потребностей человека. Наиболее распространенными считаются следующие:
 Волновой режим предполагает протекание электрического тока только через одну обмотку. Сегодня он используется редко, для того чтобы снизить нагрузку на двигатель и количество потребляемой электроэнергии.
Волновой режим предполагает протекание электрического тока только через одну обмотку. Сегодня он используется редко, для того чтобы снизить нагрузку на двигатель и количество потребляемой электроэнергии.- Полношаговый — используется гораздо чаще и считается стандартным режимом для этого типа двигателя. Напряжение на обмотке при такой работе одинаково и приспособлению требует максимальное напряжение для корректного функционирования.
- Полушаговый режим — один из оригинальных способов изменить работу приспособления и при этом не затрагивать блок управления. Заключается в одновременном запитывании всех пар обмоток, что приводит к повороту ротора на половину своего обычного шага. Используя этот метод, можно получить двигатель с двойной мощностью при минимальных затратах электроэнергии. Он будет меньше изнашиваться и прослужит дольше, чем тот, что постоянно работает в полношаговом режиме.
- Микрошаговый режим сегодня считается наиболее часто применяемым при использовании шагового двигателя. Принцип действия заключается в подаче на обмотку не импульса, а сигнала, напоминающего синусоиду по форме. Такой режим делает работу двигателя более плавной, а переход от одного шага к другому незаметным. Благодаря этому уменьшаются рывки и скачки приспособления, оно может функционировать как обычный двигатель постоянного тока.
Последний режим имеет преимущество, поскольку представляет собой скорее метод подпитки двигателя, а не управления обмотками. Именно поэтому может использоваться при волновом или полношаговом способе работы приспособления. Если рассмотреть схему функционирования прибора в микрошаговом режиме, может показаться, что шаги становятся больше. На самом деле это не так, но процесс все равно становится плавным и отсутствуют рывки.
Разновидности приспособления
 В зависимости от некоторых деталей различают несколько типов шаговых двигателей. Каждый из них имеет некоторые особенности функционирования.
В зависимости от некоторых деталей различают несколько типов шаговых двигателей. Каждый из них имеет некоторые особенности функционирования.
Двигатель с постоянным магнитом считается наиболее популярным, отличается простотой настройки и эксплуатации. Устройство несет в себе магнит круглой формы, напоминающий диск и имеющий разные полюса. Обмотки статора при включении прибора притягивают и отталкивают магнит на роторе, что и обеспечивает кручение механизма.
При использовании такого типа двигателя величина шага измеряется, и показатель колеблется в пределах 45−90 градусов. Простота применения приспособления делает его востребованным, а длительный срок службы позволяет не думать о частой замене.
Прибор с переменными магнитами
Такие приспособления не имеют на роторе специального магнита. Эта деталь изготовлена из магнитного, мягкого металла, имеет форму зубчатого диска, напоминающего шестеренку. На статоре расположено более четырех разных обмоток. Запитываются они в противоположных парах и притягивают к себе ротор.
Стоит отметить, что величина крутящегося момента несколько снижается, поскольку в устройстве отсутствует постоянный магнит. Это считается недостатком, но есть и достоинство, поскольку при работе приспособления нет момента стопора.
Стопорящий момент заключается во вращении, создаваемом расположенными на роторе постоянными магнитами. Они притягиваются к статору, а именно к его арматуре при отсутствии в обмотках электрического тока. Зафиксировать этот момент просто — необходимо попытаться рукой повернуть двигатель в отключенном состоянии. При этом обычно слышны щелчки на каждом шаге. Диапазон шага в таком двигателе колеблется в пределах 5−15 градусов.
Гибридные модели
 Название свое этот тип приспособлений получил из-за особенности работы, которая предполагает сочетание принципов шагового двигателя с постоянными и переменными магнитами. Обладает хорошими удерживающими и динамическими крутящими моментами. Достоинством прибора считается минимальная величина шага, которая не превышает показатель в 5 градусов. Именно благодаря этому обеспечивается максимальная точность.
Название свое этот тип приспособлений получил из-за особенности работы, которая предполагает сочетание принципов шагового двигателя с постоянными и переменными магнитами. Обладает хорошими удерживающими и динамическими крутящими моментами. Достоинством прибора считается минимальная величина шага, которая не превышает показатель в 5 градусов. Именно благодаря этому обеспечивается максимальная точность.
Механические части приспособления вращаются гораздо быстрее, чем в других моделях с подобным принципом работы. Часто используются в станках для производства. Главным недостатком такого двигателя считается его высокая стоимость.
Известно, что обычный мотор с 8 обмотками будет иметь по 50 положительных и отрицательных полюсов, но произвести такой магнит невозможно. Именно поэтому устройство гибридного двигателя включает в себя 2 магнитных диска, каждый имеет 50 зубцов, а также постоянный магнит цилиндрической формы.
Диски в процессе изготовления прибора привариваются к разным полюсам этого цилиндрического магнита и получается, что один из них на каждом из своих зубьев имеет положительный полюс, а другой — отрицательный. Если смотреть на конструкцию сверху, она выглядит как один диск, имеющий 100 зубьев.

На один оборот такого двигателя приходится 75 шагов, каждый из которых имеет показатель не более, чем 1,5 градуса.
Двухфазные моторы
Двухфазный шаговый двигатель очень прост в использовании, установить его и настроить может даже человек без опыта и соответствующих навыков. Приспособление имеет два типа обмотки для катушек:
 Униполярная заключается в установке одной обмотки, а также специального магнитного крана в центре, влияющего на любую фазу. Каждая секция включается для обеспечения необходимого направления магнитного поля. Достоинством этой конструкции считается возможность функционирования без специального переключения. На каждую обмотку понадобится один транзистор, поэтому установка прибора облегчается. На одну фазу приходится три провода, а на выходной сигнал необходимо шесть проводов. Подключать обмотки можно также посредством присоединения проводов с постоянными магнитами. Стоит помнить, что повернуть вал будет непросто при прикосновении клемм. Это связано с тем, что общий провод по длине несколько больше, чем та часть, которая используется для присоединения катушек.
Униполярная заключается в установке одной обмотки, а также специального магнитного крана в центре, влияющего на любую фазу. Каждая секция включается для обеспечения необходимого направления магнитного поля. Достоинством этой конструкции считается возможность функционирования без специального переключения. На каждую обмотку понадобится один транзистор, поэтому установка прибора облегчается. На одну фазу приходится три провода, а на выходной сигнал необходимо шесть проводов. Подключать обмотки можно также посредством присоединения проводов с постоянными магнитами. Стоит помнить, что повернуть вал будет непросто при прикосновении клемм. Это связано с тем, что общий провод по длине несколько больше, чем та часть, которая используется для присоединения катушек.- Биполярные типы моторов имеют только одну обмотку. Электрический ток в нее поступает особенным переломным методом посредством полюса, обеспеченного магнитом. На любую фазу приходится два разных провода. Устройство несколько сложнее, чем в униполярных моделях, но эффективность выше.
Существуют также трехфазные двигатели, имеющие узкую область использования: дисководы, различные фрезерные станки, принтеры и некоторые автомобили, где используется необычная заслонка.
Другие типы устройств
 Главная особенность реактивных приспособлений — маленький шаг, который достигает не более 1 градуса, а также расположение зубцов, находящихся на полюсах статора. Недостаток такого мотора — отсутствие синхронизирующего момента в случае обесточивания обмоток.
Главная особенность реактивных приспособлений — маленький шаг, который достигает не более 1 градуса, а также расположение зубцов, находящихся на полюсах статора. Недостаток такого мотора — отсутствие синхронизирующего момента в случае обесточивания обмоток.
Для изготовления такого прибора понадобится специальный коммутатор, поэтому стоимость его высока. Самостоятельное создание также исключается по причине сложности конструкции.
Синхронные линейные шаговые моторы используются в случае, когда необходимо автоматизировать производственный процесс. Для этого следует обеспечить перемещение объектов в плоскости. С этой целью применяется специальный преобразователь, который изменяет вращательное движение на поступательное. Достичь этого можно путем использования кинематики.
Именно с этой целью и применяется линейный двигатель, преобразующий импульсы в перемещение по одной линии. Помимо автоматизации процесса, приспособление упростит кинематическую схему проводов. В таком приборе статор изготовлен из мягкого магнитного металла, а также имеется постоянный магнит. Стабильная работа двигателя осуществляется при условии постоянной подачи импульсов на обмотки.
Шаговые моторы — универсальные приспособления, обеспечивающие бесперебойное функционирование множества электрических приборов и производственного оборудования.
Что такое шаговый двигатель, зачем он нужен и как работает
Шаговые двигатели постоянного тока получили широкое распространение в станках с числовым программным управлением и робототехнике. Основным отличием данного электромотора является принцип его работы. Вал шагового электродвигателя не вращается длительное время, а лишь поворачивается на определенный угол. Этим обеспечивается точное позиционирование рабочего элемента в пространстве. Электропитание такого двигателя дискретное, то есть осуществляются импульсами. Эти импульсы и поворачивают вал на определенный угол, каждый такой поворот называется шагом, отсюда и пошло название. Зачастую данные электромоторы работают в тандеме с редуктором для повышения точности установки и момента на валу, и с энкодером для отслеживания положения вала в текущий момент. Эти элементы необходимы для передачи и преобразования угла вращения. В этой статье мы расскажем читателям сайта Сам Электрик об устройстве, принципе работы и назначении шаговых двигателей.
- Как устроен шаговый двигатель
- Принцип действия
- Виды и типы по полярности или типу обмоток
- Типы двигателей по конструкции ротора
- Управление ШД
- Достоинства и недостатки шаговых электродвигателей
Как устроен шаговый двигатель
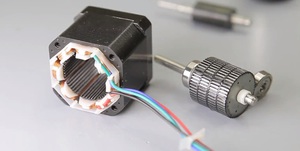
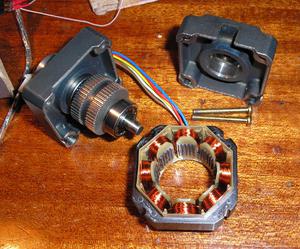
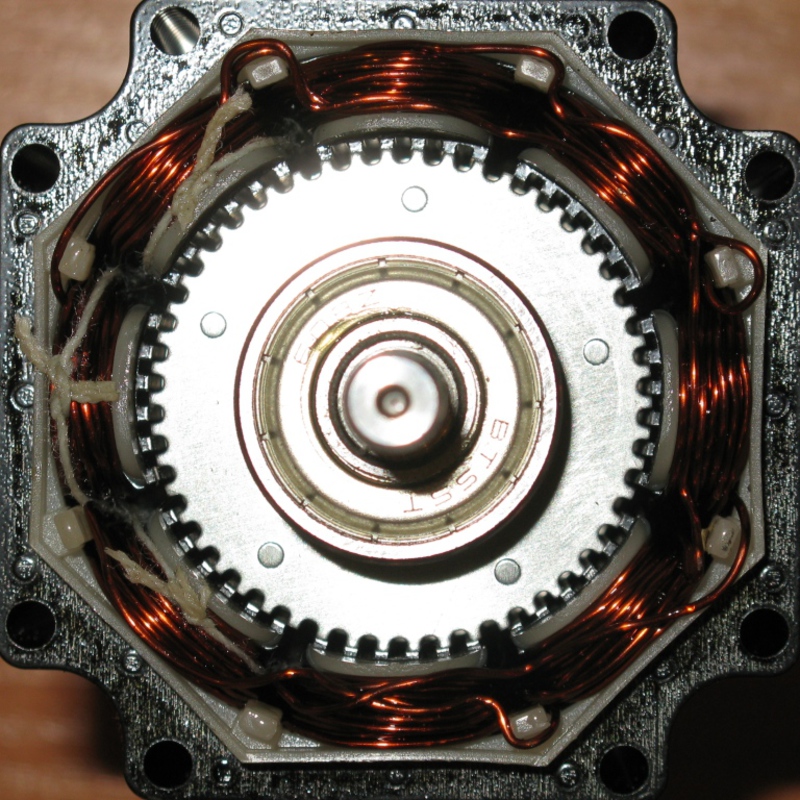
По своему типу это бесколлекторный синхронный электродвигатель. Состоит из статора и ротора. На роторе обычно расположены секции, набранные из листов электротехнической стали (на фотографии это «зубчатая» часть), а те, в свою очередь, разделены постоянными магнитами. На статоре расположены обмотки, в виде отдельных катушек.

Принцип действия
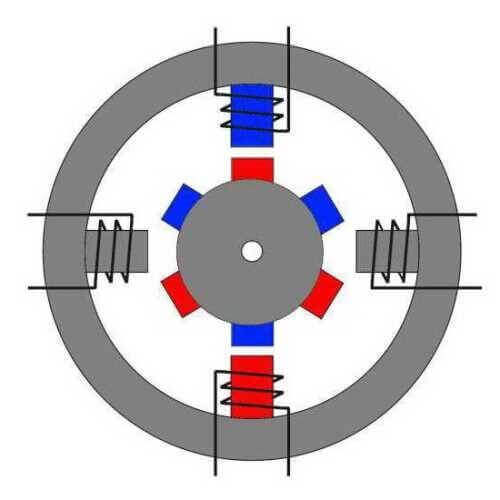
Как работает шаговый электродвигатель можно рассмотреть на условной модели. В положении 1 на обмотки А и В подается напряжение определенной полярности. В результате в статоре образуется электромагнитное поле. Так как разные магнитные полюса притягиваются, ротор займет свое положения по оси магнитного поля. Более того, магнитное поле мотора будет препятствовать попыткам изменения положения ротора извне. Если говорить простыми словами, то магнитное поле статора будет работать на то, чтобы удержать ротор от изменения заданного положения (например, при механических нагрузках на вал).
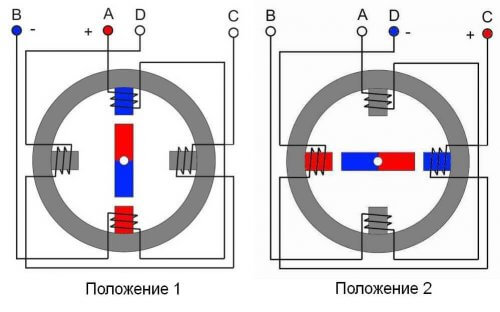
Если напряжение той же полярности подается на обмотки D и C, электромагнитное поле сместится. Это заставит повернуться ротор с постоянным магнитом в положение 2. В этом случае угол поворота равен 90°. Этот угол и будет шагом поворота ротора.
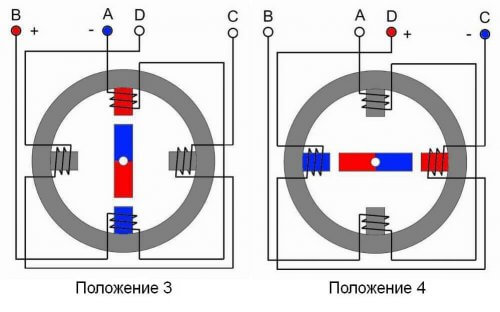
Положение 3 достигается подачей напряжения обратной полярности на обмотки А и В. В этом случае электромагнитное поле станет противоположным положению 1, ротор двигатели сместится, и общий угол будет 180°.
При подаче напряжения обратной полярности на обмотки D и C, ротор повернется на угол до 270° относительно начальной позиции. При подключении положительного напряжения на обмотки А и В ротор займет первоначальное положение — закончит оборот на 360°. Следует учитывать, что передвижение ротора происходит по наименьшему пути, то есть из положения 1 в положение 4 по часовой стрелке ротор повернется только после прохождения промежуточных 2 и 3 положения. При подключении обмоток после 1 положения сразу в 4 положение ротор повернется против часовой стрелки.
Виды и типы по полярности или типу обмоток
В шаговых двигателях применяются биполярные и униполярные обмотки. Принцип работы был рассмотрен на базе биполярной машины. Такая конструкция предусматривает использование разных фаз для питания обмоток. Схема очень сложна и требует дорогостоящих и мощных плат управления.
Более простая схема управления в униполярных машинах. В такой схеме начало обмоток подключены к общему «плюсу». На вторые выводы обмоток поочередно подается «минус». Тем самым обеспечивается вращение ротора.
Биполярные шаговые двигатели более мощные, крутящий момент у них на 40% больше чем в униполярных. Униполярные электромоторы гораздо более удобны в управлении.

Типы двигателей по конструкции ротора
По типу исполнения ротора шаговые электродвигатели подразделяются на машины:
- с постоянным магнитом;
- с переменным магнитным сопротивлением;
- гибридные.
ШД с постоянными магнитами на роторе устроен также, как и в рассмотренных выше примерах. Единственным отличием является то, что в реальных машинах количество магнитов гораздо больше. Распределены они обычно на общем диске. Количество полюсов в современных моторах доходит до 48. Один шаг в таких электромоторах составляет 7,5°.
Электромоторы с переменным магнитным сопротивлением. Ротор данных машин изготавливается из магнитомягких сплавов, их также называют «реактивный шаговый двигатель». Ротор собирается из отдельных пластин и в разрезе выглядит как зубчатое колесо. Такая конструкция необходима для того, чтобы через зубцы замыкался магнитный поток. Основным достоинством такой конструкции является отсутствие стопорящего момента. Дело в том, что ротор с постоянными магнитами притягивается к металлическим деталям электромотора. И провернуть вал при отсутствии напряжения на статоре достаточно тяжело. В шаговом двигателе с переменным магнитным сопротивлением такой проблемы нет. Однако существенным минусом является небольшой крутящий момент. Шаг подобных машин обычно составляет от 5° до 15°.

Гибридный ШД был разработан для объединения лучших характеристик двух предыдущих типов. Такие двигатели имеют маленький шаг в пределах от 0,9 до 5°, обладают высоким моментом и удерживающей способностью. Самым важным плюсом является высокая точность работы устройства. Такие электромоторы применяются в самом современном высокоточном оборудовании. К минусам можно отнести только их высокую стоимость. Конструктивно ротор данного устройства представляет собой намагниченный цилиндр, на котором расположены магнитомягкие зубцы.
Для примера в ШД на 200 шагов используются два зубчатых диска с числом зубцов 50 штук на каждом. Диски смещены относительно друг друга на ползуба так, что впадина положительного полюса совпадает с выступом отрицательного и наоборот. Благодаря этому у ротора есть 100 полюсов с обратной полярностью.
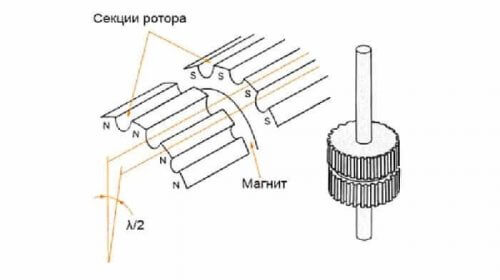
То есть и южный, и северный полюс может сместиться относительно статора в 50 различных положений, а в сумме 100. А смещение фаз на четверть дает еще 100 позиций, производится это за счет последовательного возбуждения.

Управление ШД
Управление производится следующими методами:
- Волновой. В данном методе напряжение подается только на одну катушку, к которой и притягивается ротор. Так как задействована только одна обмотка крутящий момент ротора небольшой, и не подходит для передачи больших мощностей.
- Полношаговый. В данном варианте возбуждаются сразу две обмотки, благодаря чему обеспечивается максимальный момент.
- Полушаговый. Объединяет первые два метода. В данном варианте напряжение подается сначала на одну из обмоток, а затем на две. Таким образом реализуется большее количество шагов, и максимальная удерживающая сила, которая останавливает ротор при больших скоростях.
- Микрошаговое регулирование производится подачей микроступенчатых импульсов. Такой метод обеспечивает плавное вращение ротора и снижает рывки при работе.
Достоинства и недостатки шаговых электродвигателей
К достоинствам данного типа электрических машин можно отнести:
- высокие скорости пуска, остановки, реверса;
- вал поворачивается в соответствии с командой управляющего устройства на заданный угол;
- четкая фиксация положения после остановки;
- высокая точность позиционирования, без жестких требований к наличию обратной связи;
- высокая надежность за счет отсутствия коллектора;
- поддержание максимального крутящего момента на низких скоростях.
- возможно нарушение позиционирования при механической нагрузке на вал выше допустимой для конкретной модели двигателя;
- вероятность резонанса;
- сложная схема управления;
- невысокая скорость вращения, но это нельзя отнести к весомым недостаткам, поскольку шаговые двигатели не используются для простого вращения чего-либо, как бесколлекторные, например, а для позиционирования механизмов.
Шаговый двигатель также называют «электродвигатель с конечным числом положений ротора». Это и есть наиболее ёмкое и в то же время краткое определение таких электромашин. Они активно применяются в ЧПУ-станках, 3D-принтерах и роботах. Главным конкурентом шагового двигателя является сервопривод, но у каждого из них есть свои преимущества и недостатки, которые определяют уместность использования одного или другого в каждом конкретном случае.