Шаговый двигатель за что отвечает
Шаговый двигатель за что отвечает
Шаговый двигатель — что это такое и как им управлять.
Автор: Поздеев Андрей aka moLCHec
Опубликовано 20.07.2007
Сегодня шаговые двигатели (далее ШД) активно используются в различных приводах и позиционирующих системах, что объясняется их невысокой ценой и достаточной надёжностью, также применение шаговых двигателей позволяет обойтись без дорогого контура скорости и положения, при этом не накапливается ошибка положения. Первые модели ШД имели малое число шагов и большие габариты, что сильно ограничивало их использование.
Существует 3 типа ШД:
Реактивные:
Поперечное сечение реактивных ШД.
а) трехфазный б) четырёхфазный.
На постоянных магнитах:
Поперечное сечение четырехфазного ШД на постоянных магнитах.
Конструкция гибридного ШД:
1 — магнитопровод статора, 2 — обмотки, 3 — магнитопровод ротора, 4 — обмотка статора, 5 — постоянный магнит.

Структура ротора гибридного ШД:
1 — шихтовая сталь, 2- постоянный магнит.
Из доступных радиолюбителю являются движки от принтеров которые являются гибридными ШД, других я просто не встречал, поэтому в дальнейшем речь пойдёт о них.
Ну вот из чего состоит ШД и, что он себя представляет разобрались самое время вникать как этим добром управлять. Различают одно и двухфазное возбужде-ние. В дальнейшем я буду рассматривать четырехфазный ШД т.к. именно с ним я работал в трехфазном всё аналогично.
Одним из недостатков ШД является колебательность ротора при установке в новое положение это обусловлено прежде всего инерцией ротора. Согласно теории при двухфазном возбуждении колебания затухают быстрее, чем при однофазном, однако при этом возрастают броски коммутирующего тока. На практике же я не об-наружил существенной разницы, обмотки при двухфазном управлении грели лучше батареи, колебания тока затухали дольше, чем при однофазном. В механике может оно быстрее, однако максимальная шаговая скорость не увеличилась.
Кроме одно- и двухфазного управления существует полушаговый режим. В этом режиме за цикл ротор делает половинный шаг, данный режим осуществляется особым управление обмотками.

Как оно там происходит видно на рисунке ниже:
Сравнение однофазного, двухфазного и полушагового управления:
а) однофазное; б) двухфазное; в) полушаговое.
Также у гибридных двигателей есть режим микрошага для этого на обмотки подаётся синусоидальное напряжение, при этом осуществляется почти плавное перемещение ротора, однако сказывается фиксирующий эффект обусловленный зубцами ротора и статора. При использовании датчиков положения ШД работает аналогично вентильному двигателю.
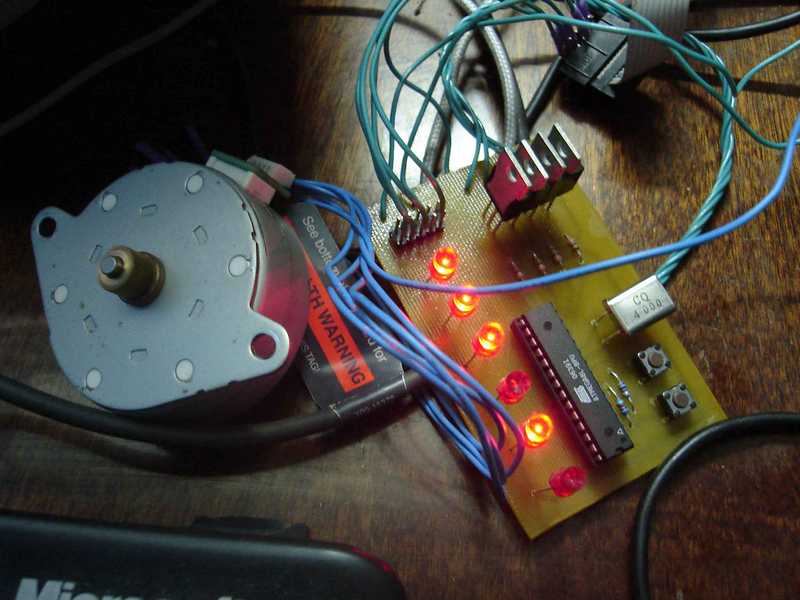
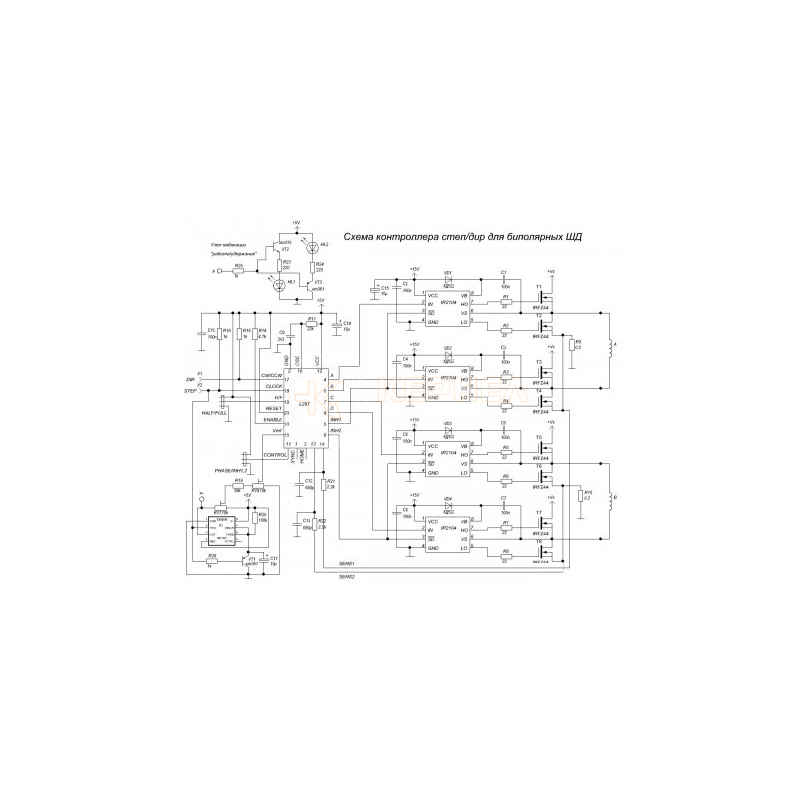
Теории думаю хватит, будем считать что к чему разобрались. Руки чешутся всё это попробовать. Начнём со схемы, я правда обычно начинаю с печатки, а схема это лишь следствие.
Несколько слов по схеме, в EAGLE почему-то не было ATMEGA8 в DIP корпусе, взял TQFP поэтому номера выводов для DIP корпуса отличны. Транзисторы Т1-Т4 составные BD677A, BD679A, BD681 или КТ829Б, я использовал последние, позже купил BD681, но проверить ещё не успел. При питании ШД от 5В можно применить BD675A, возможны и другие аналоги аналогичной мощности и коэффициентом передачи тока более 750, что обусловлено большими бросками тока в фазах при коммутации. Изначально я поставил КТ814 в результате транзюки нагрелись так что отпаялись, текстолит потемнел, МК естественно отправился в мир иной.
Диоды D1-D4 любые выдерживающие ток от 1А и напряжение от 50В. Светодиоды в принципе любые, сопротивление R3 выбирается в зависимости от тока светодиодов. L1-L4 это обмотки ШД, номера обмоток обозначены условно главное чтоб по порядку. Мой ШД по документации работает при напряжении до 24В, я гонял на 12В и 22В, обмотки и транзисторы при этом греются сильно, так что аккуратнее. Питание на обмотки подаётся через переключатель S4, он должен быть рассчитан на ток порядка 3-4А. Переключатель S3 включает защитные диоды, это сделано для того что-бы можно было осциллографом проследить коммутационные процессы с ними и без них. Ставить их вообще не обязательно работать будет. Основная функция диодов — защита транзисторов он бросков напряжения при коммутации.
Печатную плату можно стырить в конце статьи.
Свою плату я делал давно и рисунок потерял. Этот вариант рисовал для ленивых, советую проверить перед изготовлением я мог и ошибиться. Разъём под программирование разводить не стал т.к. у различных программаторов по разному, про-сто вывел соответствующие пины кому надо разведёт, места много.
Настало время браться за прошивку (которая так же доступна в виде файла в конце статьи). Пишу я на Си в компиляторе ICC for AVR, если используете другой компилятор то часть кода в части обработчика пре-рывания и включения файлов регистров и п.т.
Немного расскажу о программе. Таймер счётчик работает в режиме СТС(4) сброс при совпадении, предделитель = 1, соответственно значение шаговой частоты F=fclk/OCR1A, в программе за частоту отвечает глобальная переменная time тина int. Выбор скорости осуществляется нажатие кнопки SPEED, для кварца 4000 кГц в данной версии прошивки значения шаговой частоты будет 0,1; 0,2; 1 и 5 кГц. При переключении скорости соответственно загораются светодиоды LED1. LED4. Пере-ключатель switch в обработчике прерывания при инкременте переменной driver, обеспечивает полушаговое управление, однако если выделить только нечётные зна-чения получится однофазный режим, чётные — двухфазный, для того что бы обеспе-чивалось соответствующее изменение driver введена дополнительно переменная step, когда выбран режим 1или 2 (переменная tip) переменная step =1 и driver инкремен-тируется на 2, при step =0 drive rинкрементируется на 0. При установке режима 1 или 2, переменной присваивается значение этого режима, таким образом осуществ-ляется выделение нечётных для 1-го и чётных для 2-го режима. Для индикации ре-жима предназначены светодиоды LED5 и LED6, при 0-м выключенном режиме они не горят при этом напряжение с обмоток снимается во избежании из перегрева. В целом я считаю код довольно понятным и не требует особых знаний. При желании его можно адаптировать под себя.
Ну и в заключениии — фото на память:
Файлы:
Прошивка (с исходником) — 01.rar
Печатная плата — 02.rar
Позиционирование с высокой точностью
Устройства автоматизации в современной промышленности призваны оптимизировать производственные процессы, уменьшить риск брака вследствие человеческого фактора, ускорить и удешевить изготовление конечной продукции.
В качестве исполнительных приводов таких устройств большое распространение получили шаговые двигатели.
 Шаговый двигатель представляет собой машину, преобразующую цифровые электрические сигналы в угловое перемещение ротора, выполняемое с высокой точностью. Если говорить точнее, шаговый двигатель всегда работает совместно с блоком управления, который принимает и обрабатывает электрические сигналы и коммутирует фазы шагового двигателя.
Шаговый двигатель представляет собой машину, преобразующую цифровые электрические сигналы в угловое перемещение ротора, выполняемое с высокой точностью. Если говорить точнее, шаговый двигатель всегда работает совместно с блоком управления, который принимает и обрабатывает электрические сигналы и коммутирует фазы шагового двигателя.
Шаговые двигатели изготавливаются в различных массогабаритных исполнениях, с различными величинами углового шага и крутящими моментами. Самые малогабаритные модели (2 х 2 х 3 см) легко встраиваются в самые миниатюрные аппараты – мини-дозаторы, приводы стрелок индикации и приборы точной механики.
Модели средних габаритов используются в устройствах перемещения и позиционирования, например, для ориентирования деталей перед обработкой либо в конвейерах.
Большие высокомоментные шаговые приводы перемещают тяжеловесное оборудование в заданное положение, осуществляют открытие и закрытие дверей, протягивают рулоны бумаги, картона, ткани.
Даже при отсутствии обратной связи положение ротора двигателя всегда известно. Точность установки положения может достигать нескольких сотых долей градуса. Поэтому даже тяжеловесное и громоздкое оборудование можно позиционировать с высокой точностью.
Шаговый двигатель отрабатывает угловые перемещения с заданной точностью и фиксируется в нужном положении. Направление и величина перемещения задаются специальным блоком управления. Шаговые двигатели всегда работают в паре со специальными устройствами, которые получают внешние сигналы, в соответствии с которыми перемещают ротор двигателя с заданной скоростью в нужном направлении.
В промышленности используются различные варианты систем управления шаговыми двигателями. Чаще всего встречаются разделённые системы:
— одна часть отвечает за коммутацию фаз двигателя (т. е. подачу электропитания на обмотки) называется драйвером шагового двигателя;
— другая часть определяет параметры движения – скорость и ускорение, направление вращения, величину углового перемещения – контроллер шагового привода.
Драйвер не только коммутирует фазы, но и при необходимости дробит основной шаг двигателя, позволяя уменьшить величину углового перемещения и тем самым повысить разрешающую способность электропривода. Современные системы, как правило, позволяют достичь довольно высокой точности перемещения, а значит, и позиционирования.
 Контроллер, определяющий все характеристики работы двигателя, может быть реализован в виде отдельной специализи-рованной платы управления, встраиваемой в оборудование в виде блока с элементами управления для работы с оператором, либо вообще в качестве логического контроллера используется компьютер со специализированным программным обеспечением. Последний вариант особенно часто применяется в станках с ЧПУ.
Контроллер, определяющий все характеристики работы двигателя, может быть реализован в виде отдельной специализи-рованной платы управления, встраиваемой в оборудование в виде блока с элементами управления для работы с оператором, либо вообще в качестве логического контроллера используется компьютер со специализированным программным обеспечением. Последний вариант особенно часто применяется в станках с ЧПУ.
Раздельное исполнение логической (контроллер или компьютер) и силовой (драйвер) частей дает возможность использовать шаговые двигатели в широком спектре задач. Однако зачастую бывает удобнее использовать более компактный совмещенный вариант, включающий в себя и драйвер, и контроллер. Программируемые многофункциональные контроллеры облегчают подключение, т. к. вместо трех частей исполнительной системы (шаговый двигатель – драйвер – контроллер) остаются только две. Еще одно преимущество таких многофункциональных устройств – более компактные размеры.
НПФ «Электропривод» разрабатывает как комбинированные блоки управления, представляющие собой драйвер и контроллер в едином корпусе, так и моноблочные драйверы и контроллеры шаговых двигателей.
Наталья Тамбовцева, специалист НПФ «Электропривод»
Фотография предоставлена НПФ «Электропривод
Шаговый двигатель (Step motor)
 Движение ротора в шаговом двигателе происходит за счет последовательной подачи напряжения на обмотки двигателя, после подачи напряжения на одну из обмоток, ротор фиксируется в определенном положении, а поочередная подача заставляет ротор делать так называемые шаги, именно этот факт определил название — шаговый двигатель (Step motor).
Движение ротора в шаговом двигателе происходит за счет последовательной подачи напряжения на обмотки двигателя, после подачи напряжения на одну из обмоток, ротор фиксируется в определенном положении, а поочередная подача заставляет ротор делать так называемые шаги, именно этот факт определил название — шаговый двигатель (Step motor).
В 30-е годы прошлого столетия появились первые шаговые двигатели и сразу же получили широкое применение во всех отраслях промышленности. Сегодняшние шаговые двигатели претерпли значительные изменения, но принцип работы остался прежним.
Производители шаговых двигателей
 По прошествии практически ста лет шаговый двигатель остается популярным промышленным оборудованием, а его производством занимаются многие известные производители, такие как:
По прошествии практически ста лет шаговый двигатель остается популярным промышленным оборудованием, а его производством занимаются многие известные производители, такие как:
- Autonics;
- Ametek;
- Beckhoff;
- CMZ;
- Delta;
- OMS;
- SanyoDenki;
- JVL.
И многие другие производители промышленного оборудования и электроники.
Драйвер шагового двигателя (Stepper driver)
За направление вращения ротора и его скорости отвечает драйвер шагового двигателя, который последовательно подает напряжение на обмотки статора, ток на обмотках определяет угол поворота вала. Драйвер шагового двигателя (Stepper driver) — это силовой модуль в задачу которого входит последовательное формирование тока питания для каждой обмотки двигателя.



Ремонт шагового двигателя и драйвера ш.д. в сервисном центре
 Сервисный центр «Кернел» предлагает услуги по ремонту промышленной электроники и оборудования такого как шаговые двигатели и драйвера шаговых двигателей. В виду малого ресурсного запаса драйвера ш.д. не редко выходят из строя, обратившись в нашу компанию вы гарантированно получите глубокую диагностику промышленного оборудования, которая покажет причину выхода из строя оборудования и последующий профессиональный ремонт драйвера шагового двигателя в сжатые сроки.
Сервисный центр «Кернел» предлагает услуги по ремонту промышленной электроники и оборудования такого как шаговые двигатели и драйвера шаговых двигателей. В виду малого ресурсного запаса драйвера ш.д. не редко выходят из строя, обратившись в нашу компанию вы гарантированно получите глубокую диагностику промышленного оборудования, которая покажет причину выхода из строя оборудования и последующий профессиональный ремонт драйвера шагового двигателя в сжатые сроки.
Наш сервисный центр уделяет максимальное внимание на качество исполнения ремонта. Мы производим ремонт шаговых двигателей и драйверов ш.г. на компонентном уровне с использованием только оригинальных запасных частей, мы уверены в качестве выполненных работ и смело даем гарантию на все ремонтные работы 6 месяцев.
Подключение шагового двигателя, настройка и программирование
Мы ценим наших клиентов и предлагаем ремонт не только на территории сервисного центра, но и с выездом на территорию заказчика, для подключения шагового двигателя его последующую настройку и программирование.
Если вы заинтересованы в ремонте (перемотке) шагового двигателя или в ремонте драйвера шагового двигателя, вы можете оставить заявку на ремонт либо с помощью специальной форме на сайте, либо связавшись с нашими менеджерами несколькими способами:

- Заказав обратный звонок (кнопка в правом нижнем углу сайта)
- Посредством чата (кнопка расположена с левой стороны сайта)
- Либо позвонив по номеру: +7(8482) 79-78-54; +7(917) 121-53-01
- Написав на электронную почту: 89171215301@mail.ru
Вот далеко не полный список производителей промышленной электроники и оборудования, ремонтируемой в нашей компании.
Шаговый двигатель
Итак, мы уже рассказали, как устроен серво мотор и сегодня начнем разбирать шаговый двигатель, его схему, драйверы управления и то, где его лучше всего использовать!
Начнем мы с того, что «на пальцах» рассмотрим принцип функционирования данной железяки. Каждый шаговик имеет внутри себя несколько электромагнитов, расположенных вокруг вала. Подавая питание в нужной последовательности на каждую из них, вращающийся элемент двигателя стремится примагнититься катушке. Быстрым переключением питания между электромагнитами можно добиться большой скорости вращения вала мотора и перемещать его в любое положение с большой точностью. Однако для обеспечения этой точности используются различные вспомогательные устройства, так как такой тип двигателя имеет крайне неприятной эффект вибрации. О таких нюансах мы и расскажем далее!
Любой шаговый двигатель имеет два основных элемента: ротор (вал мотора) и статор (неподвижный корпус). Первый состоит из обычных магнитов, а второй — из электрических, управляемых катушек. Стоит отметить, что как раз за счет шагов от одной катушке к другой в шаговиках присутствует вибрация, вызванная инерцией вала мотора. Профили магнитов, принципы управления электромагнитами — все это разделяет шаговики на типы и наделяет их своими плюсами и минусами.
Разделим шаговики на 3 основных класса:
- Переменный шаговый двигатель
Ротор не имеет постоянных магнитов, а оснащен ферромагнитной шестерней. Это материал, который крайне эффективно магнититься, но не так сильно по сравнению с постоянным. Это приводит к проигрышу в крутящем моменте. Зато отсутствует стопорящая сила, возникающая за счет магнитного поля между корпусом мотора и ротором с постоянным магнитом, которую легко почувствовать, покрутив шаговик в выключенном состоянии (характерные щелчки).
Движок оснащен большим количеством катушек, которые включаются попарно. Величина шага варьируется от 5 до 15 градусов.

- Шаговый двигатель с постоянным магнитом
Ротор такого устройства состоит из нескольких разнополюсных магнитов. Принцип разбирали в самом начале. Характерный шаг от 45 до 90 градусов.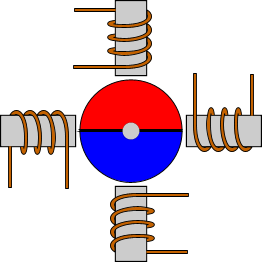
- Гибридный шаговый двигатель
Как можно догадаться, данный тип совместил в себе первые два и унаследовал все плюсы. Отличительными характеристиками данного шаговика являются высокая точность (1-5 градуса), малая вибрация и приличная скорость вращения. Все хорошо, но такие штуки отличаются от своих собратьев еще и ценой! Это связано со сложностью изготовки. Но производители пошли на технологическую хитрость. Практически невозможно создать многозубцовую (скажем, 100) шестеренку, где соседние зубья будут разных полюсов.
Но достаточно просто создать два таких диска, имеющих противоположные полюса. Затем их сдвигают так, что если посмотреть сбоку, получится то, что мы и хотели. Осталось правильным образом расположить обмотки и включать их по оптимальной логике, обеспечивающей наибольшую эффективность!
Теперь давайте пробежимся по методам управления шаговыми двигателями. Их также можно разделить на несколько пунктов:
- Полношаговое управление одной обмоткой
Это самый простой вариант. Последовательно включается только одна катушка и к ней притягивается вал мотора. В таком случае крутящий момент будет меньше чем в следующем способе.
- Полношаговое управление двумя обмотками
Принцип такой же, как и в предыдущем случае, но теперь управление идет парой электромагнитов. Это обеспечивает максимальный крутящий момент мотора, но требует в два раза больше тока или напряжения (зависит от метода подключения катушек друг к другу).
- Полушаговое управление
Данная логика включения катушек позволит увеличить число шагов, а, следовательно, и точность в 2 раза! Аналогично предыдущим пунктам, можно управлять одной катушкой или парой. Вся фишка в том, что в данном случае переход на следующую катушку происходит не при полном выключении предыдущей. То есть, при работе двух соседних катушек вал мотора встает в промежуточное состояние.
- Сверхточное управление
Наверное, у многих после предыдущего пункта появилась мысль: а что если мы будем подавать разную мощность на две соседние катушки, меняющуюся по определенному закону, и получим еще больше промежуточных шагов? Именно так и устроены современные двигатели в сверхточных ЧПУ и прочих подобных устройствах. Хитрое управление обмотками позволяет значительно повысить точность позиционирования подобных моторов. В таких случаях используют специальные драйверы для шаговых двигателей, позволяющих осуществлять подобный режим управления.
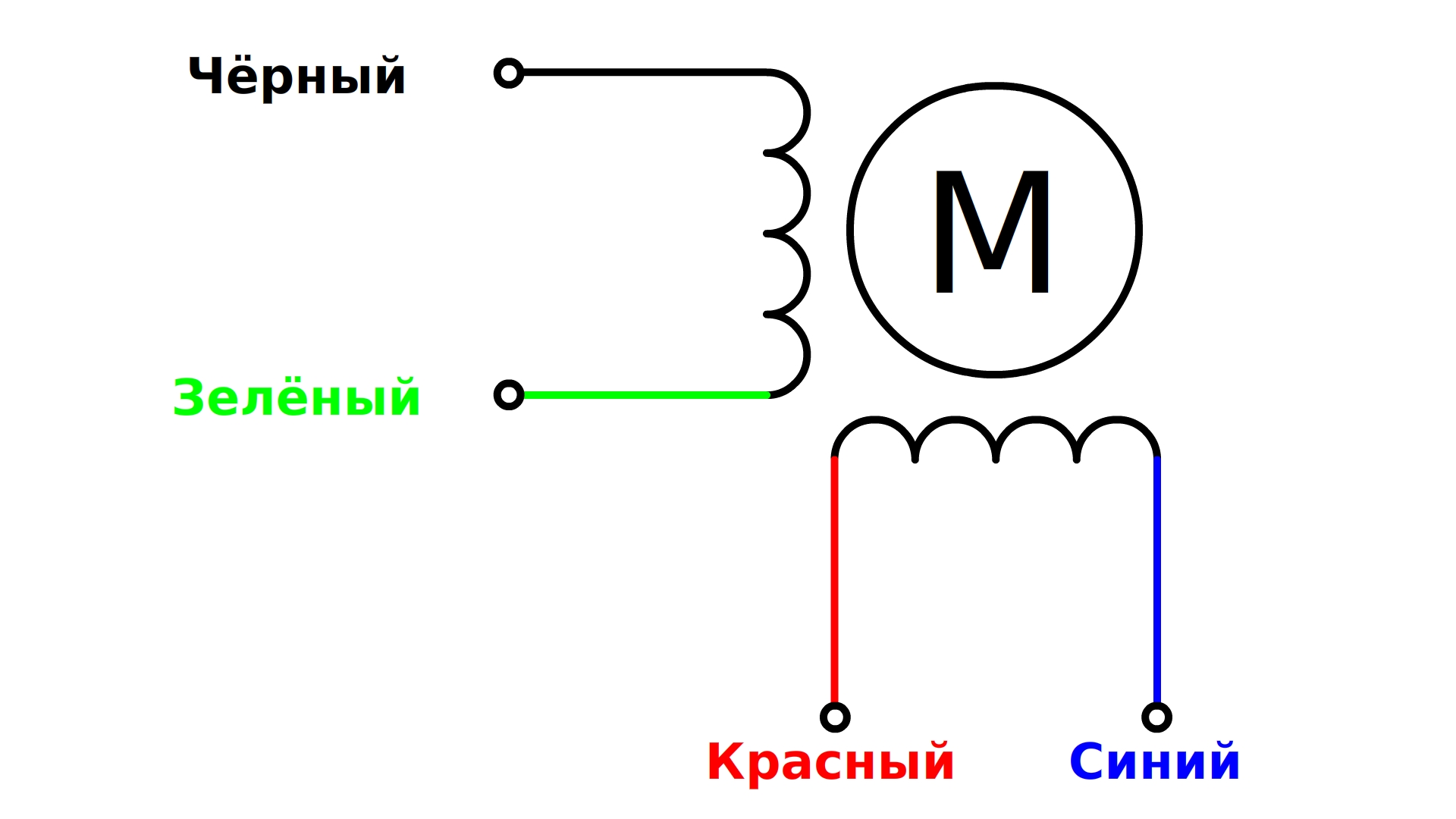
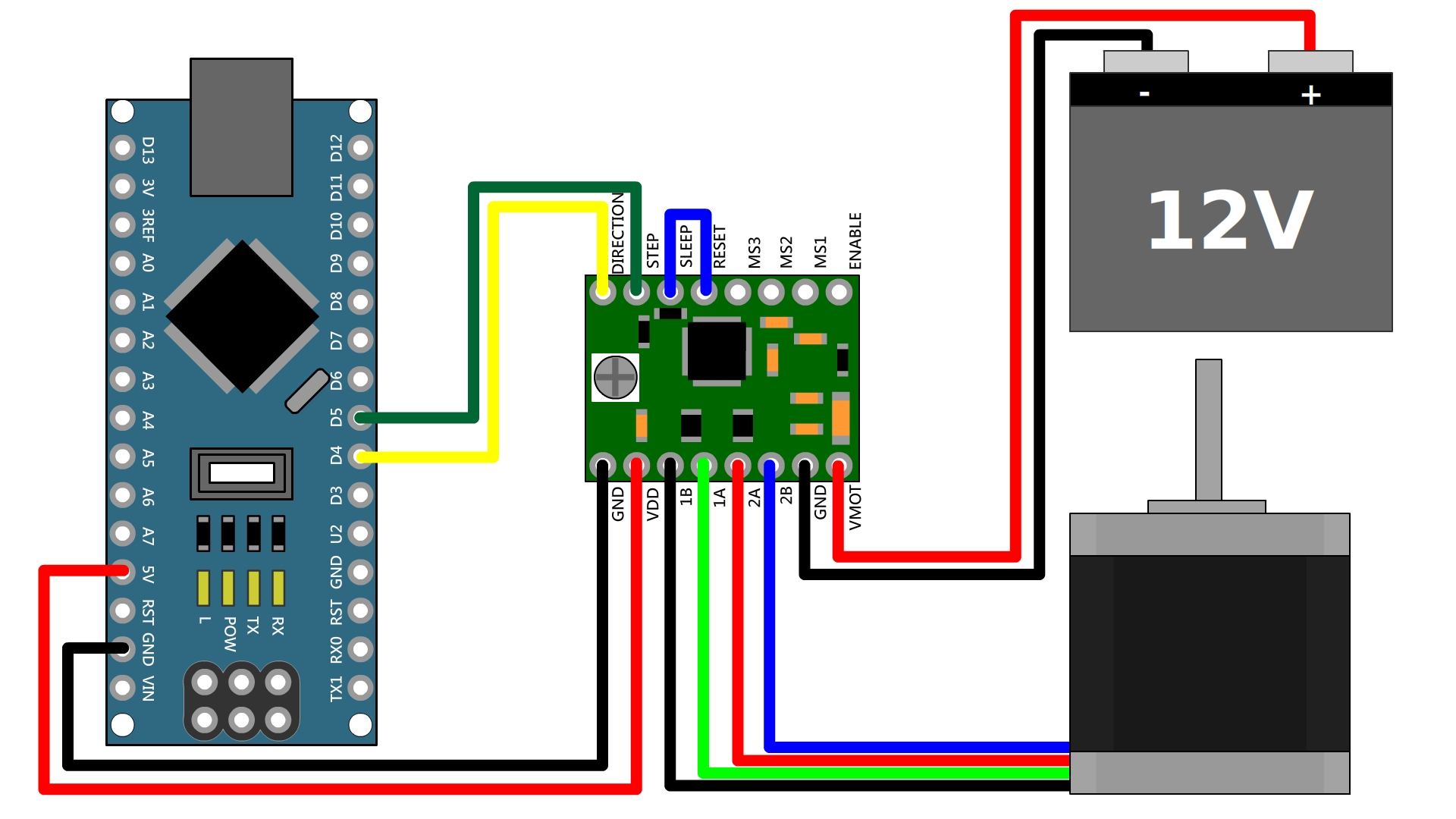
В качестве примера в данной статье рассмотрим подключения двух шаговых двигателей к плате Arduino. Для начала рассмотрим мотор 17hs4401, которой используется в 3D принтерах. Данная модель является биполярной, то есть у нас есть две пары обмоток от которых идет 4 кабеля.

Шаговый двигатель 17hs4401 обладает большим крутящим моментом и может питаться от сети 12 V. Чтобы не перегружать нашу плату управления большими мощностями, шаговик подключается к ней с помощью специального драйвера А4988, который способен работать в жестких условиях (до 35 V и 2 А).
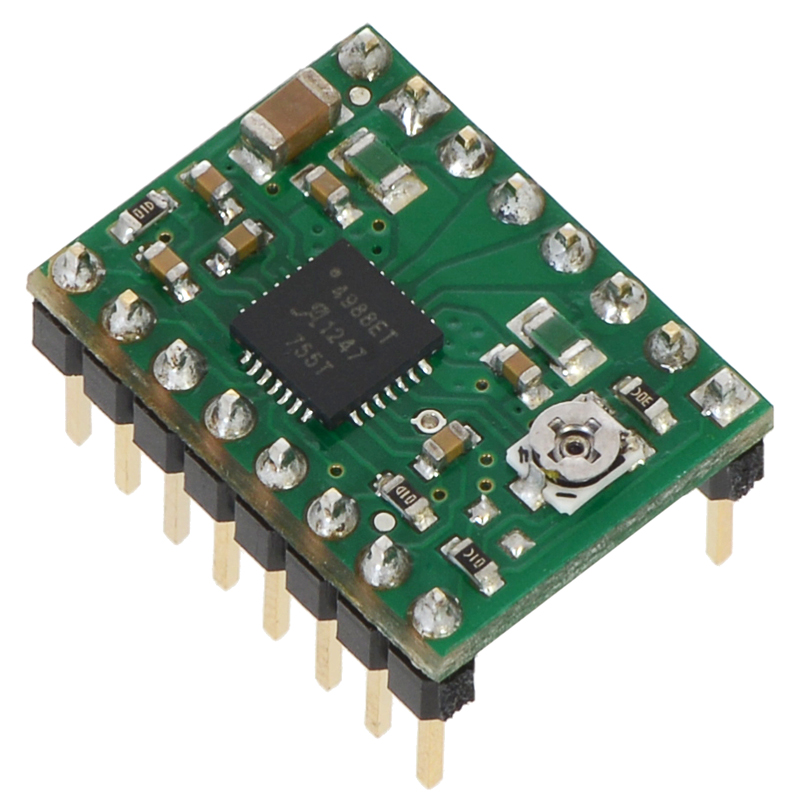
Слабые управляющие сигналы с Arduino идут на драйвер, а тот уже взаимодействует с 17hs4401 с более мощными параметрами по току и напряжению. К ножкам A4988 VDD и GND подводится питание логического уровня (3 — 5,5 В), к VMOT и GND — питание двигателя (8 — 35 В). Стоит отметить, что в данной системе бывают скачки напряжения, которые могут привести к поломке оборудования. Поэтому (на 3D принтерах всегда) ставят большие конденсаторы (более 47 мкФ). Драйвер имеет болт, который регулирует силу тока. Работая на предельных значениях, вы рискуете сжечь его, особенно если не наклеен радиатор, идущий в комплекте с устройством.
Шаговик 17hs4401 за полный оборот совершает 200 шагов. Это весьма неплохо, но для лучшего позиционирования (крайне важно для ЧПУ) используют схему управления с микрошагами, которую мы изучили ранее. A4988 позволяет осуществлять такую процедуру с коэффициентами 1/2, 1/4, 1/8 и 1/16 шага (комбинируя управление через выходы MS1, MS2, и MS3).
| MS1 | MS2 | MS3 | Step |
| Low | Low | Low | Full |
| High | Low | Low | 1/2 |
| Low | High | Low | 1/4 |
| High | High | Low | 1/8 |
| High | High | High | 1/16 |
Пин STEP отвечает за микрошаг шаговика, DIRECTION — за направление вращения. Выводы STEP и DIRECTION не подтянуты к какому-либо конкретному внутреннему напряжению, поэтому их не стоит оставлять плавающими при создании приложений. Если требуется вращать двигатель в одном направлении,коннектим DIR с VCC или GND. Драйвер имеет три различных входа для управления состоянием питания: RESET, SLEEP и ENABLE. Вывод RESET плавает, если его не нужно использовать, то следует подключить его к SLEEP, чтобы подать на него высокий уровень и включить плату.
Теперь давайте перейдем непосредственно к подключению данного мотора к микрокомпьютеру. Соединяем контакты согласно указанной ниже схеме:
Обычно, такие моторы используются любителями при сборке 3d принтеров своими руками. Для этого используют Arduino MEGA и шилд ramps 1.4, о котором мы говорили в этой статье. Удобство использования данного комплекта состоит в том, что не нужно соединять кучу проводов — за вас уже все разведено. Таким образом, легко подключить сразу до 5 шаговиков!
Более простым и дешевым вариантом шагового мотора является модель 28byj-48. Его подключение немного запутанное, но несмотря на это он пользуется большой популярностью у любителей собирать роботов! Поэтому мы немного расскажем о том, как 28byj-48 подключить к Arduino. В первую очередь нам понадобиться драйвер ULN2003APG. Это очень дешевая железяка, встречается как готовая плата с разъемами, так и просто чип с голыми ножками. Сначала посмотрим, как подключать второй вариант.
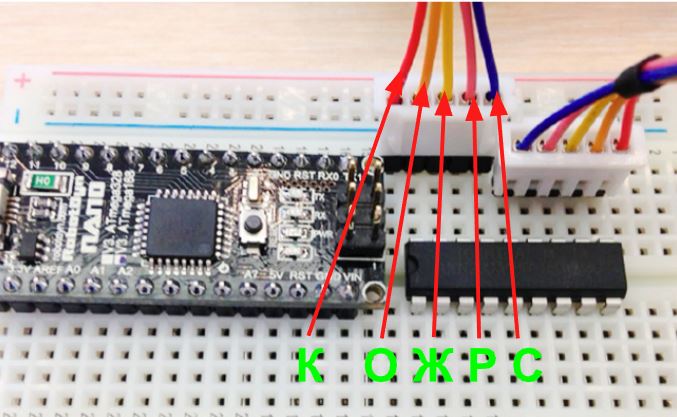
На данной картинке покано подключение двух шаговых двигателей к плате Arduino Nano. C обратной стороны драйвера все ножки соединяем с цифровыми пинами, кроме крайней правой — ее ведем к GND. При программировании вам потребуется осуществить настройку моторов к пинам и в этом случае необходимо указать правильную последовательность: оранжевый, синий, желтый, розовый. Именно в таком порядке необходимо будет подавать управляющий сигнал с ножек микропроцессора. Как видно на рисунке, красный провод левого коннектора не попадает на ULN2003APG — его необходимо соединить с выходом 5V или VIN.
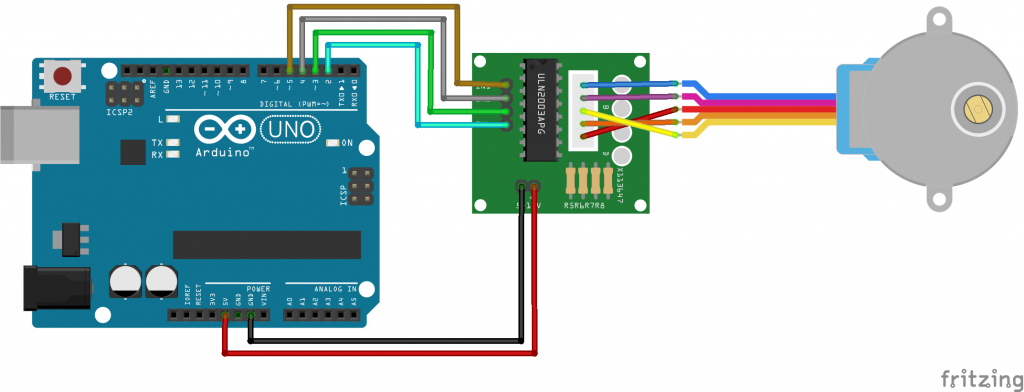
Есть более простой способ подключения шаговика 28byj-48 через готовую плату с коннектором:
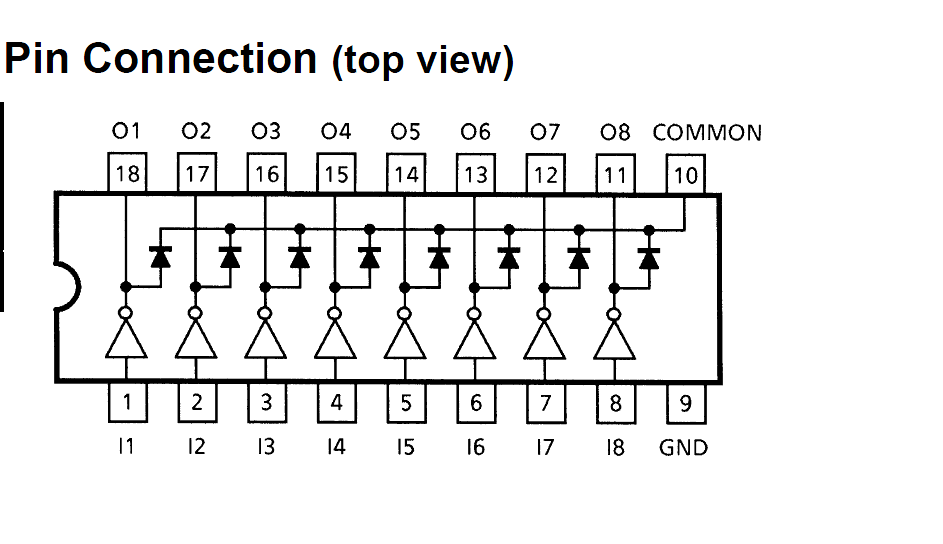
На всякий случай приведем распиновку драйвера:
На этом у нас все, если будут вопросы — всегда готовы ответить!