
Электрический линейный привод: как сделать актуатор своими руками
Электрический линейный привод: как сделать актуатор своими руками
Линейные приводы используются во всех современных крутых девайсах: 3Д-принтеры, лазерные резчики, ЧПУ. Одним из основных факторов, влияющих на стоимость линейных актуаторов, является линейная направляющая, которая состоит из компонентов, которые поддерживают прямой ход управляемой части устройства (например, набор точных стержней и линейных подшипников).
Цены на компоненты направляющих могут варьироваться от десятков до тысяч долларов в зависимости от их размера и точности. Один из способов обойти высокую стоимость этих компонентов — заменить их механизмом, который преобразует вращательное движение в прямолинейное. Механизм Саррюса, изобретенный в 1853 году Пьером Фредериком Саррюсом, как раз является одним из таких механизмов, которые могут обеспечить идеально ровное линейное движение, и для которых не нужны какие-либо справочные руководства.
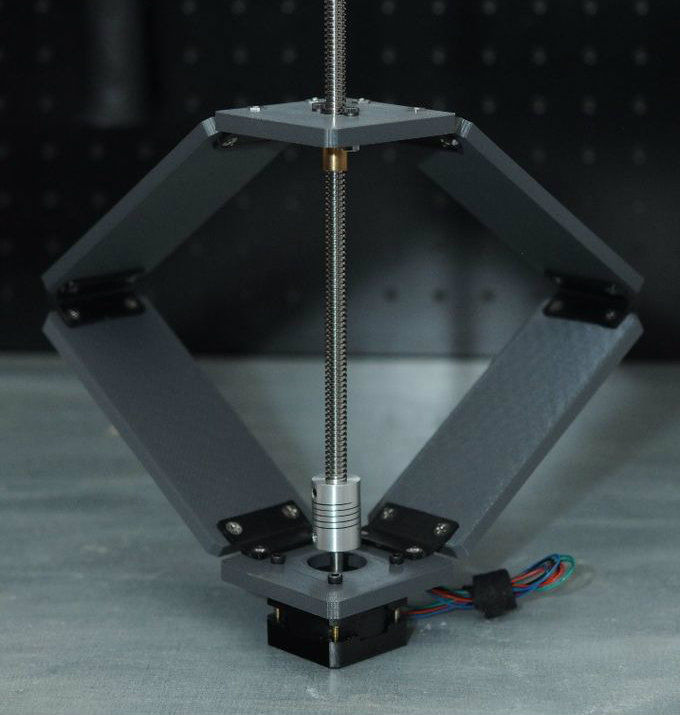
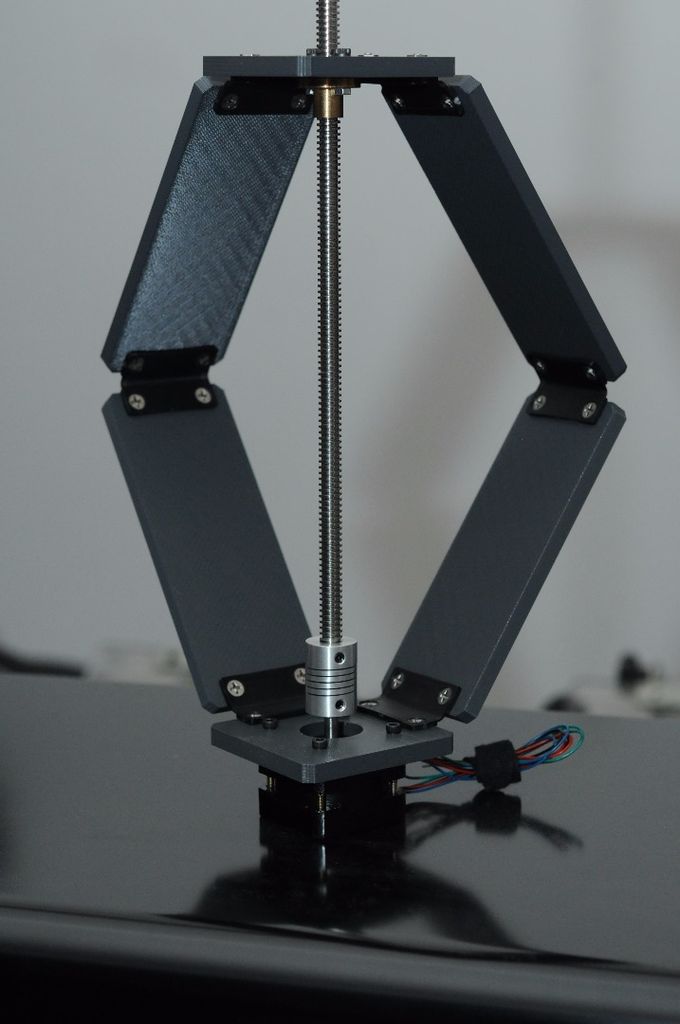
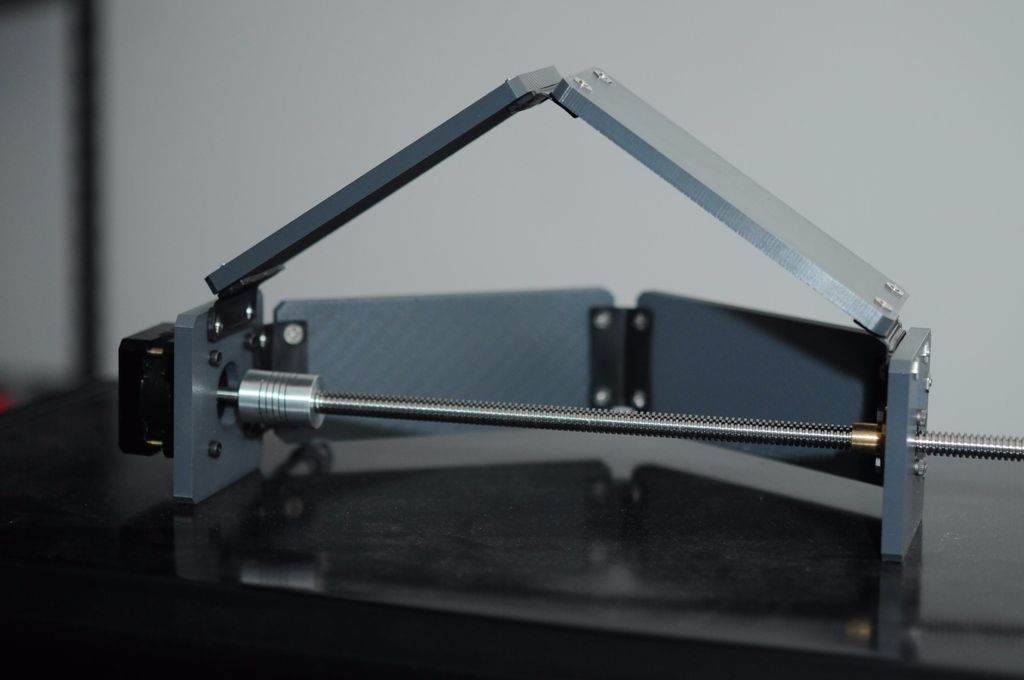
В этом проекте для создания недорогого механизма Саррюса используются простые пластины, напечатанные на 3Д принтере или вырезанные лазером, а также пластиковые «живые» петли. Затем, чтобы заставить их двигаться, к ним добавляется шаговый двигатель NEMA 17 и резьбовой стержень. Длина хода привода в этом проекте составляет приблизительно 254 мм, но бОльшая или меньшая версия может быть выполнена путем простого изменения длины соединительных пластин.
Шаг 1: Материалы и приспособления
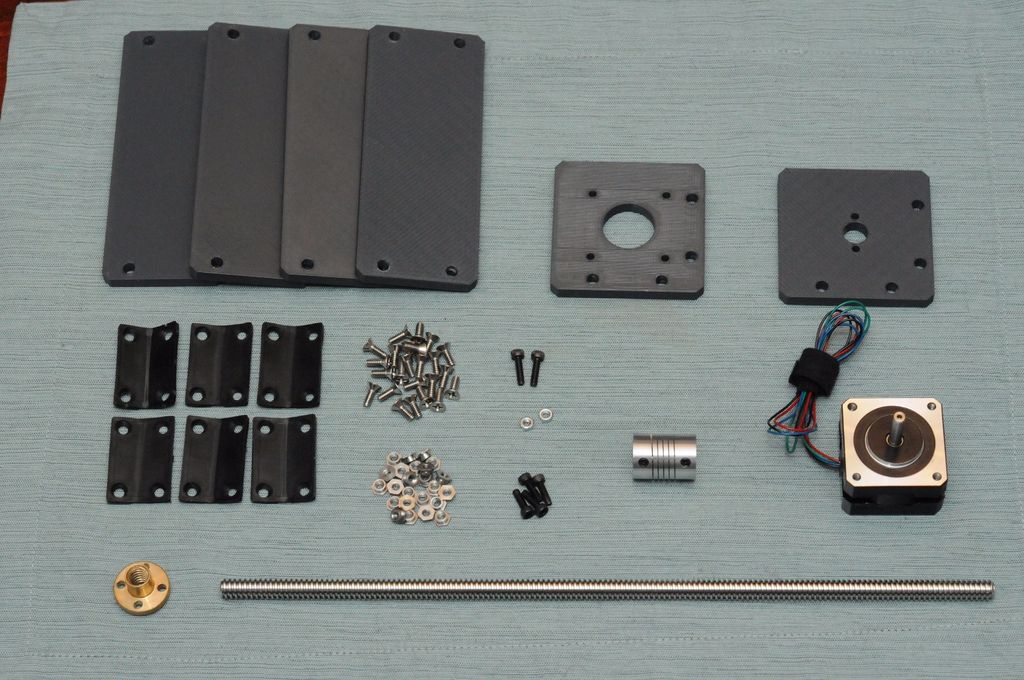

- Связующая пластина (4 штуки, напечатанные на 3Д-принтере или вырезанные лазером в Шаге 2)
- Пластина двигателя (1 штука, напечатанная на 3Д-принтере или вырезанная лазером в Шаге 2)
- Пластина привода (1 штука, напечатанная на 3Д-принтере или вырезанная лазером в Шаге 2)
- Пластиковые петли (6 штук, куплены мной в McMaster-Carr, парт-номер 1637A713)
- Винты с плоской головкой, резьба 6-32 x 9,5 мм длиной (24 штуки)
- Пресс-гайка, резьба 6-32 (1 упаковка из 25 штук, куплены мной в McMaster-Carr, парт-номер 94674A515)
- Винты с выемкой под шестигранник в головке, M3x0.5 x 12 мм длиной (2 штуки)
- Шестигранные гайки, M3x0.5 (2 штуки)
- Винты с выемкой под шестигранник в головке, M3x0.5 x 10 мм длиной (4 штуки)
- Муфта вала, 5 х 8 мм (1 штука)
- Шаговый мотор NEMA 17 с монтажными отверстиями с резьбой M3x0.5 (1 штука)
- Гайка Акме M8 (1 штука)
- Стержень с резьбой Акме M8, 300 мм длиной (1 штука)
- Набор шестигранных ключей
- Отвертка
- Плоскогубцы
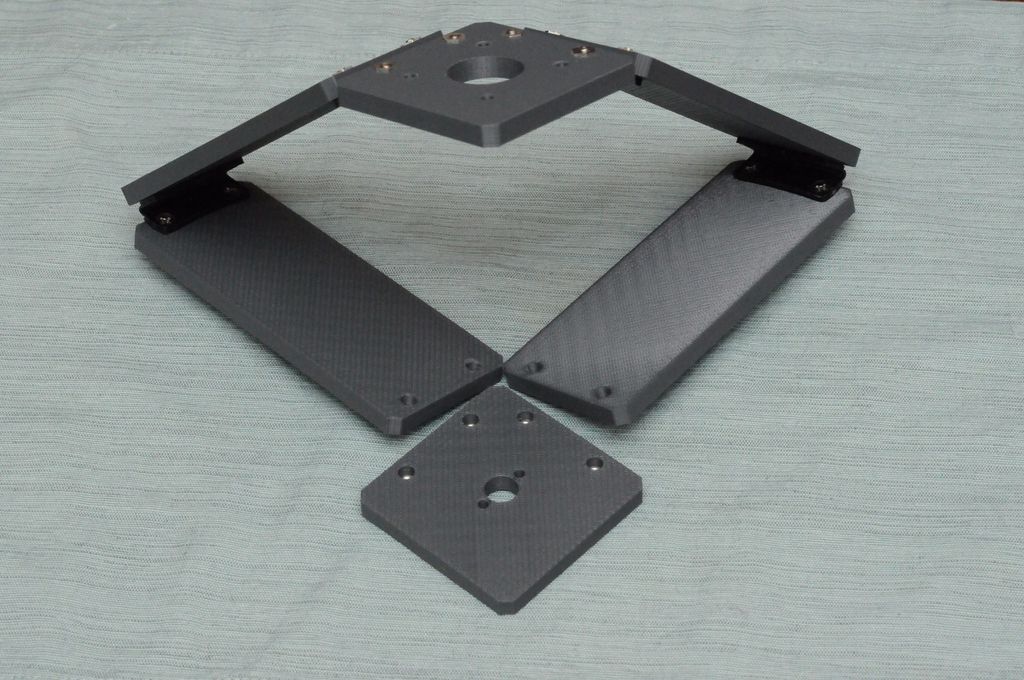
Шаг 2: Печатаем или вырезаем связующие
Используя прикреплённые файлы, напечатайте на 3Д-принтере, либо вырежьте на лазерном резчике следующие части:
- Связующая пластина (4 штуки)
- Пластина двигателя (1 штука)
- Пластина привода (1 штука)
Свои части я напечатал серым пластиком ABS. Если вы вырежете части лазером, то толщина их должна составить около 6.35 мм. В качестве материала подойдёт дерево, акрил, МДФ или любой другой схожий материал.
Я прикрепляю файлы формата STEP для тех из вас, кто хочет внести в проект свои изменения. Если вы планируете использовать этот электрический привод в реальной машине, вам, вероятно, потребуется добавить свои монтажные отверстия и/или увеличить/уменьшить длину соединительных пластин в соответствии с вашими нуждами.
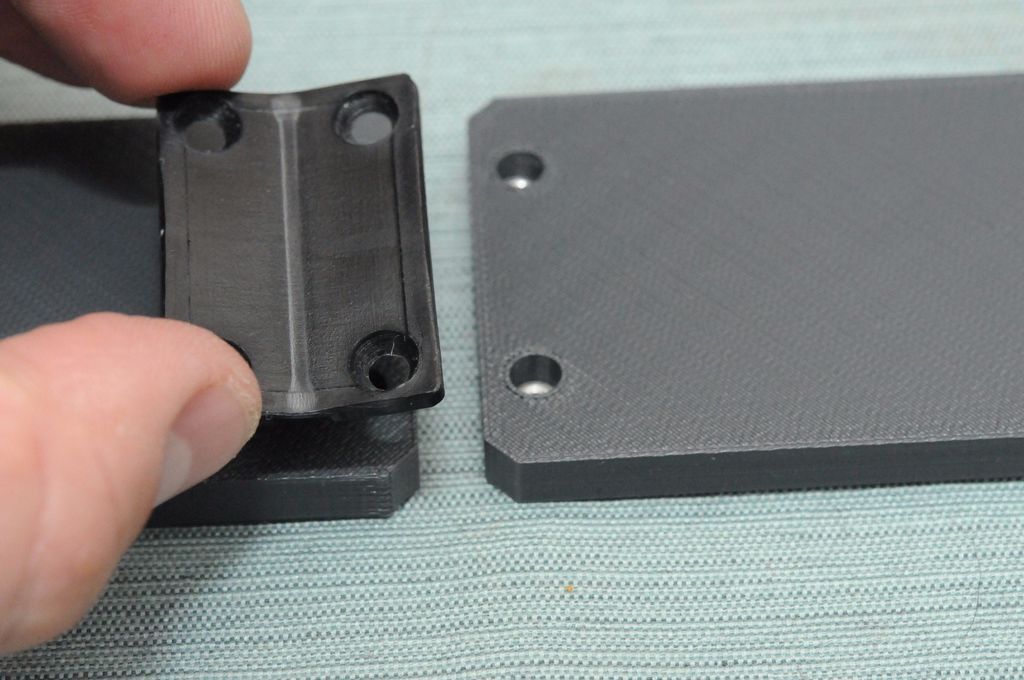
Шаг 3: Вставляем пресс-шайбы
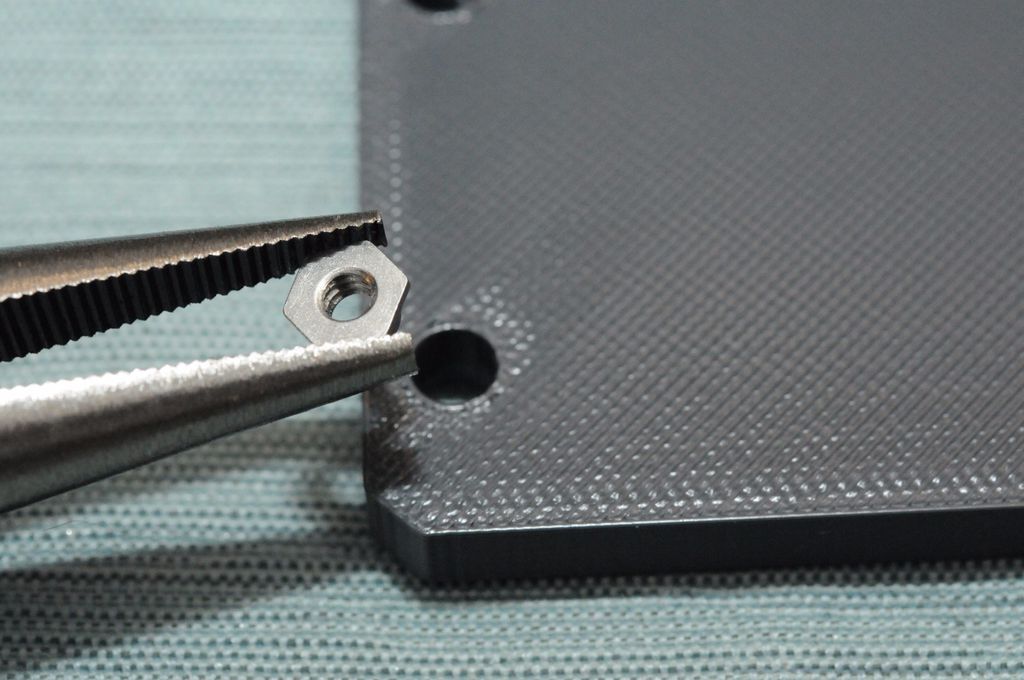

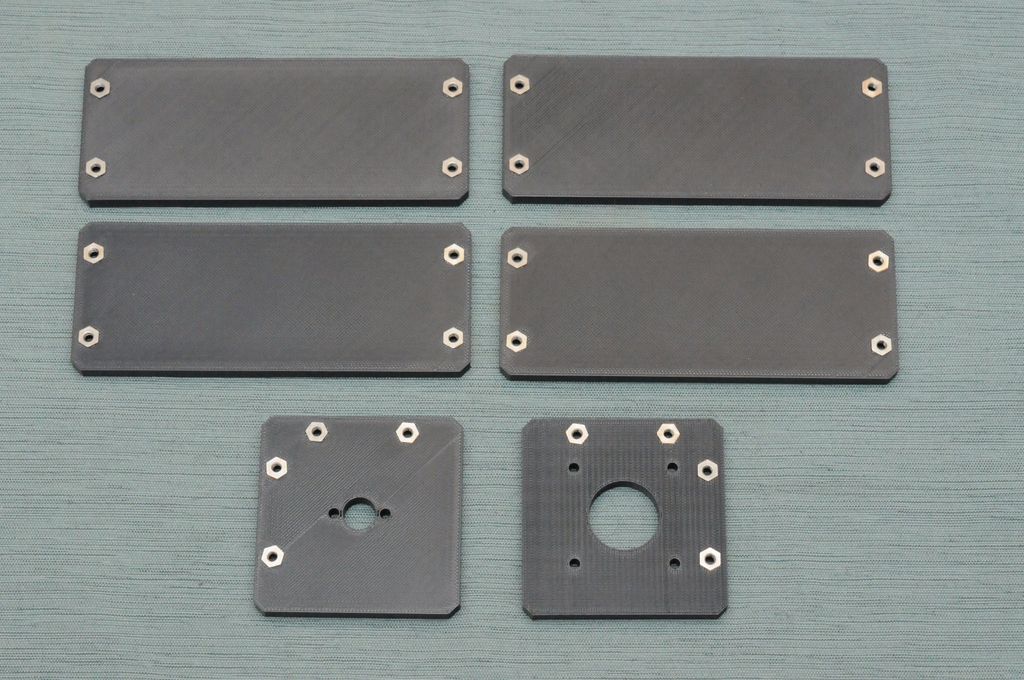
Вставьте шайбы в связующие, пластину двигателя и привода. Обратите внимание на ориентацию пластин двигателя и привода.
Шаг 4: Установите на связующие пластины петли



Установите петли согласно фотографиям и прочно закрепите их четырьмя винтами с плоской головкой. Не сорвите резьбу слишком большим давлением.
Повторите процедуру и соедините петлёй две оставшиеся связующие пластины. У вас должно получиться два набора соединённых пластин.
Шаг 5: Установите петли на двигатель
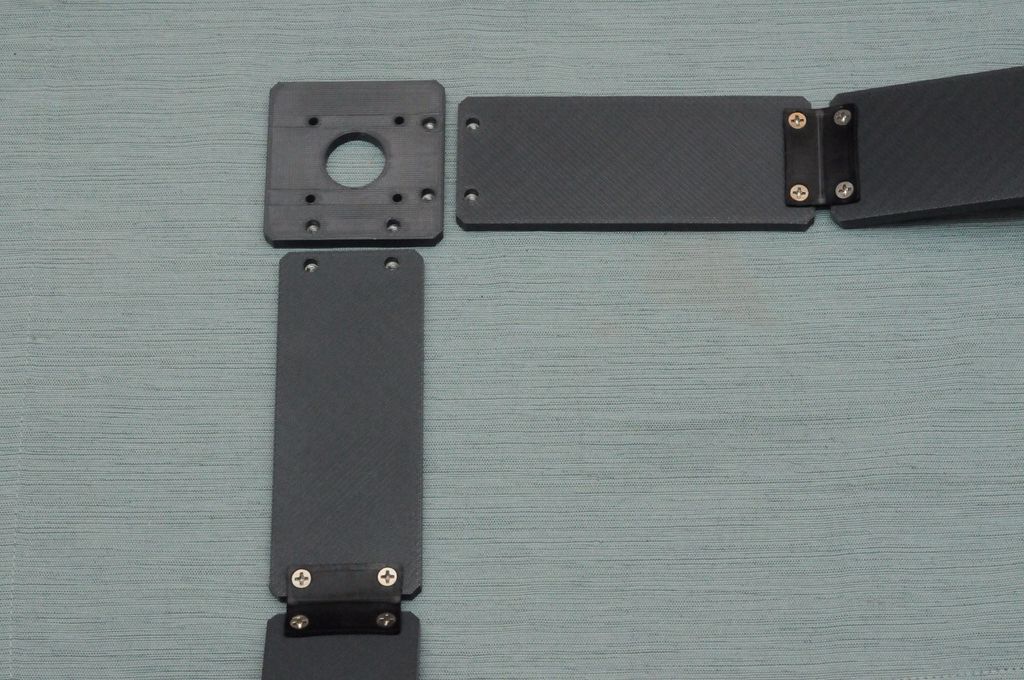
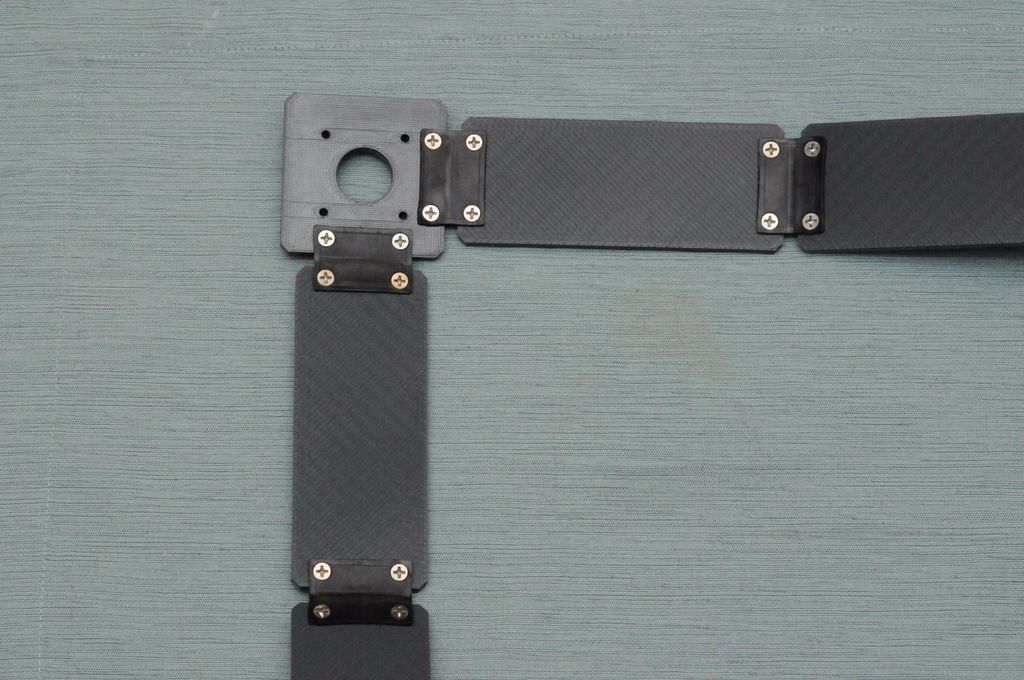
Расположите пластину двигателя и два набора связующих как показано на фото. Установите две петли при помощи восьми винтов с плоской головкой.
Шаг 6: Установите петли привода
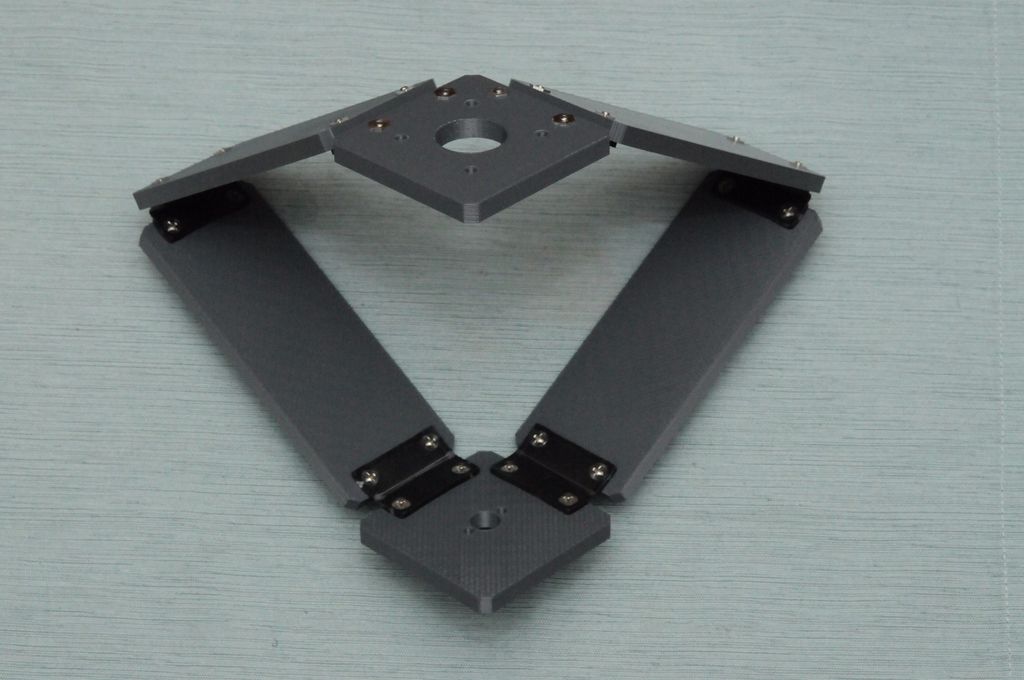
Расположите пластину привода и связующие пластины как показано на фото. Установите две пластиковые петли при помощи восьми винтов с плоской головкой.
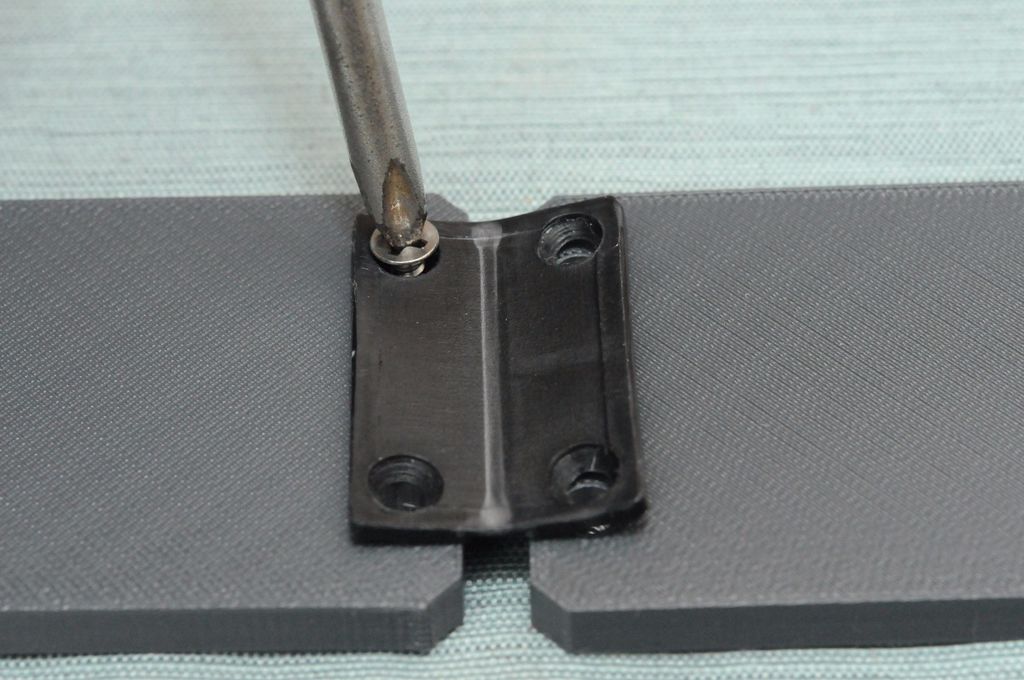
Шаг 7: Устанавливаем гайку Акме


Вставьте два винта с выемкой под шестигранник M3 x 12 мм сквозь связующее привода, как показано на картинке. Опустите на них гайку Акме. Закрутите две шестигранных гайки M3 поверх винтов. Переверните пластину привода. Затяните винты, удерживая гайки плоскогубцами и поворачивая винты подходящим шестигранным ключом.
Шаг 8: Прикрепите шаговый двигатель
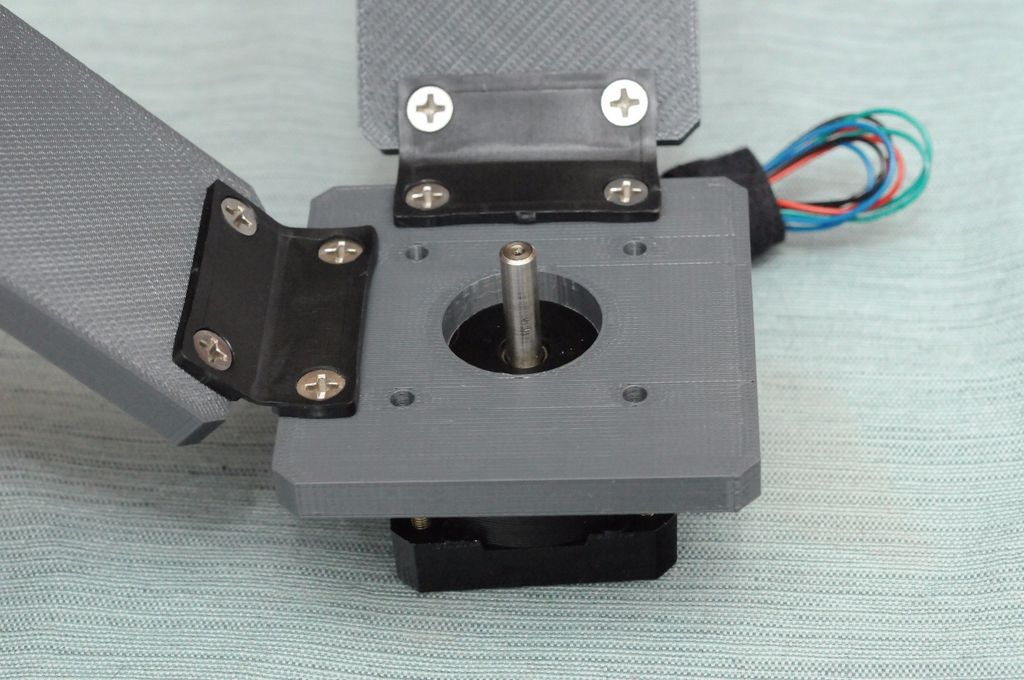
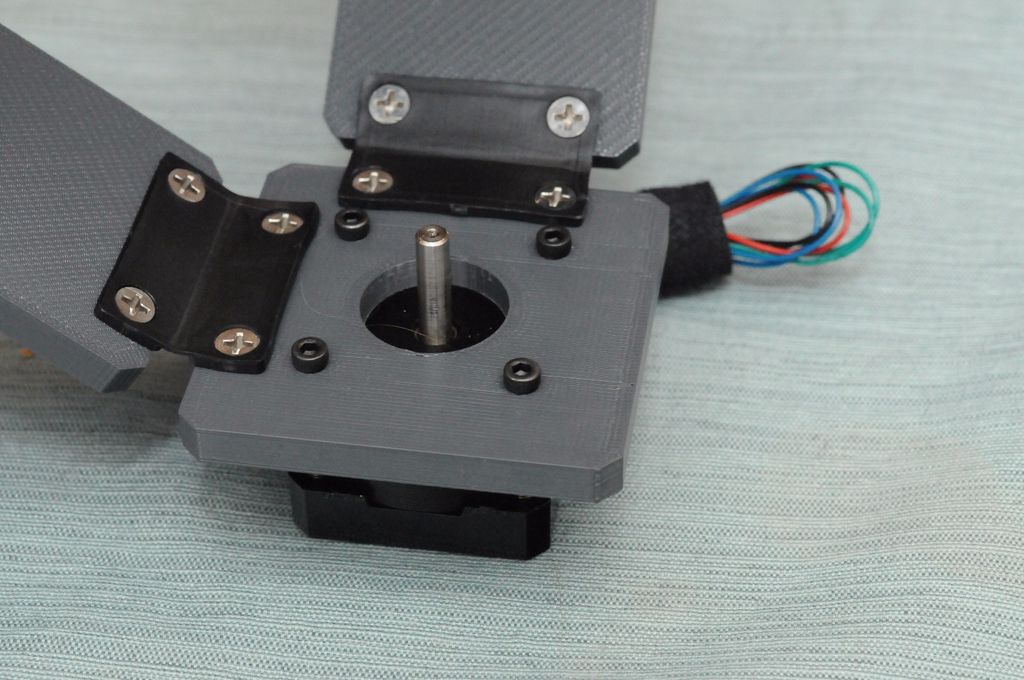
На связующее двигателя при помощи четырёх винтов с выемкой под шестигранник M3 x 10 прикрепите шаговый двигатель.
Шаг 9: Прикрепляем муфту вала
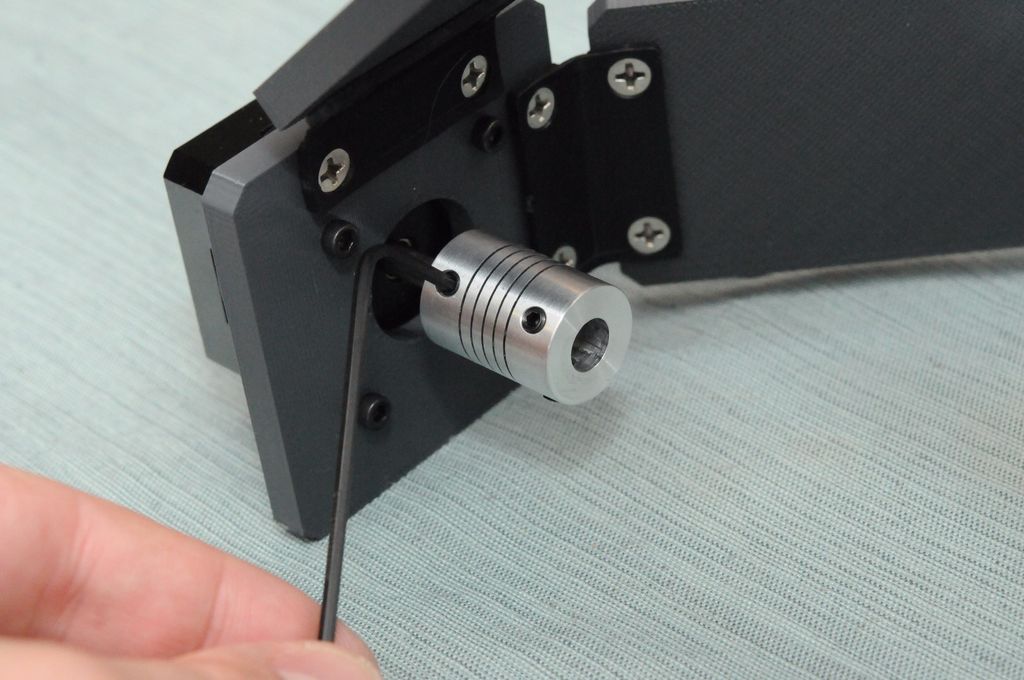
Оденьте на вал двигателя 5-миллиметровую муфту вала, затяните винты шестигранным ключом.
Шаг 10: Установите стержень с резьбой Акме
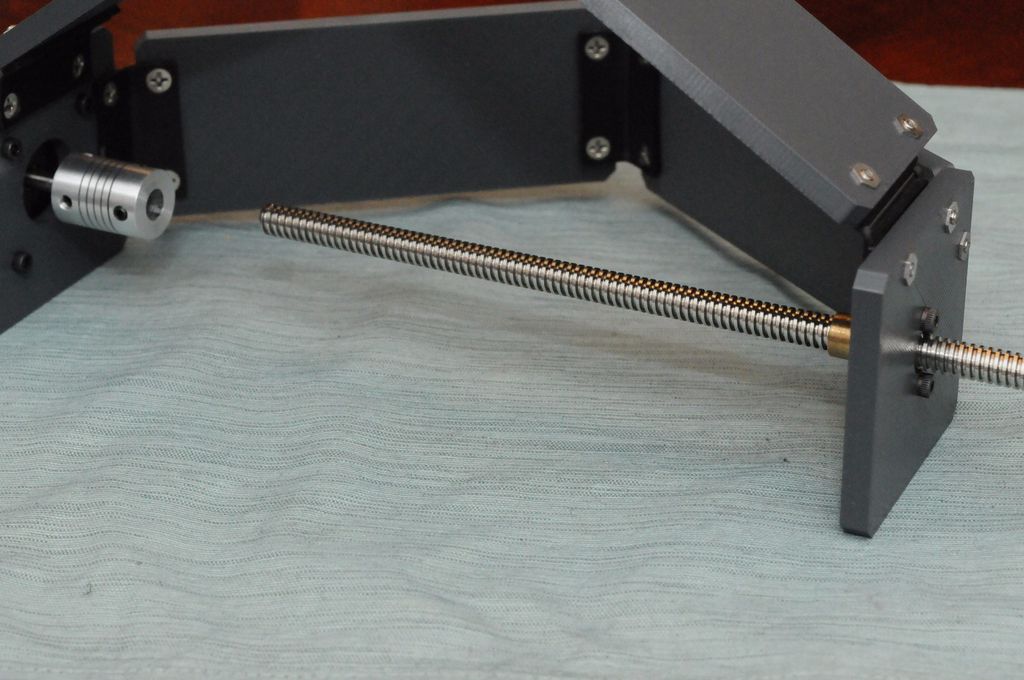
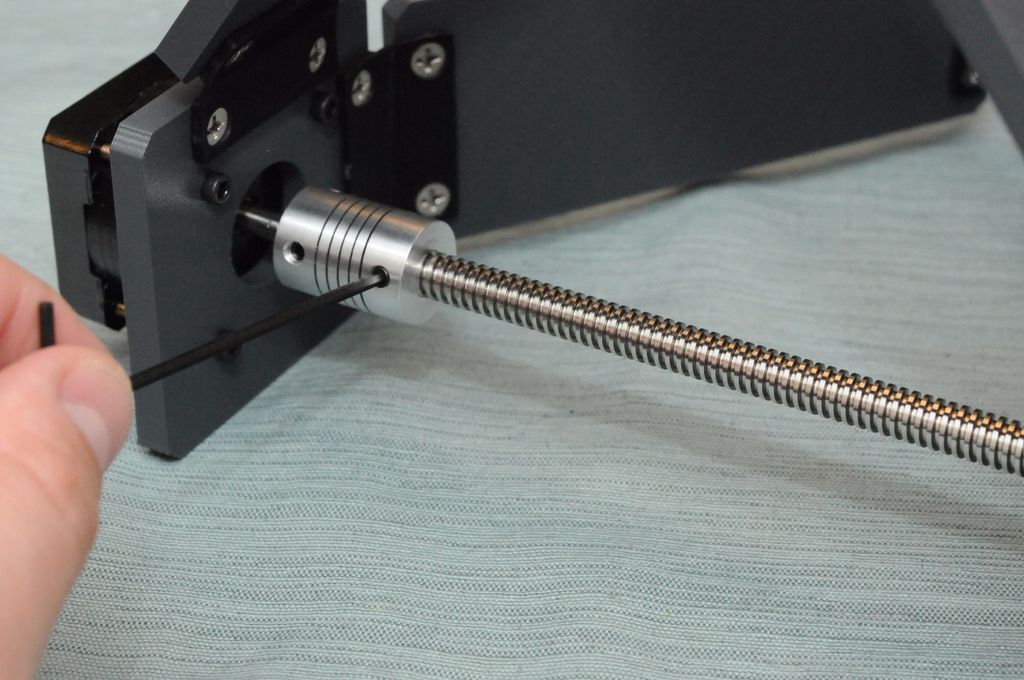
Вкрутите стержень в гайку Акме примерно наполовину. Согните механизм Саррюса таким образом, чтобы вы смогли продеть стержень с резьбой в муфту вала. Затяните винты на муфте вала подходящим шестигранным ключом.
Шаг 11: Запустите механизм
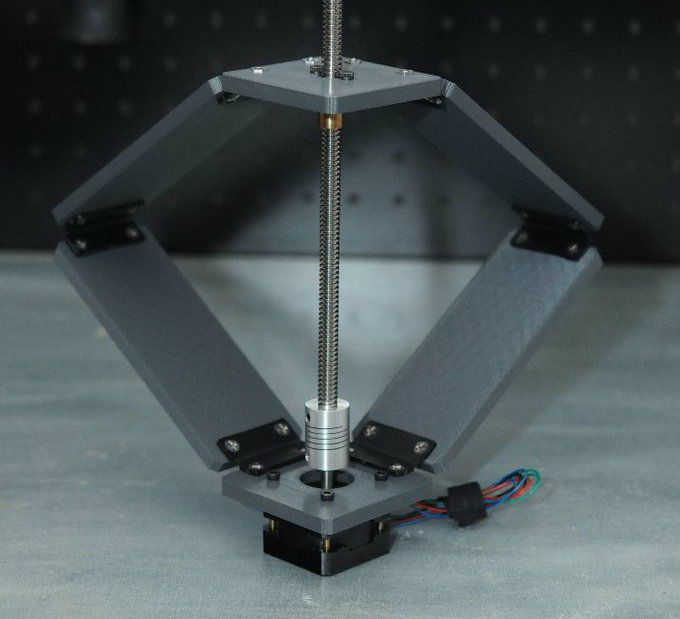
Сборка линейного электропривода своими руками подошла к концу! Теперь осталось лишь подключить шаговый двигатель к контроллеру, и механизм придёт в движение.

Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
roboforum.ru
Технический форум по робототехнике.
- Список форумов‹Мастерская‹Механика
- Изменить размер шрифта
- Версия для печати
- Магазин
- Правила
- Wiki
- FAQ
- Регистрация
- Вход
Линейный привод — как сделать ?
Линейный привод — как сделать ?
Широкий » 19 фев 2008, 10:24
Все конструкции с механикой рычажного типа (андроидные, инсектоидные) завязяны на «искусственные мышцы».
Прямое расположение двигателей в суставах через червяки и прочее по-моему утяжеляет узлы конструкции (редуктор в суставе). Необходимость затрат энергии на удержание тоже минус.
Доступных конструкций механических мышц пока нет (пневматика не в счет — дорого и не совсем адекватно при позиционировании и нагрузках).
Оптимально — гидравлический привод а-ля мышца.
Пока тоже доступных нет (хотя можно сделать имея токарный станок используя принципы и элементы автомобильных тормозных цилиндров, прокладок сантехники и пр.). Здесь по-моему загвоздка в гибких и прочных шлангах и управляемых клапанах.
Идея такая — создать имитатор гидроцилиндра.
Плюсы — нет затрат энергии на удержание положения, возможность переноса идей на большие конструкции гидравликой.
Для нулевых затрат энергии на удержание нужно применять пары винт-гайка
Самые большие задачи —
1. обеспечить минимум трения;
2. обеспечить отсутствие люфтов в механизме;
3. уменьшить габариты.
Re: Имитатор гидроцилиндра
Myp » 19 фев 2008, 10:28
Re: Имитатор гидроцилиндра
Широкий » 19 фев 2008, 10:36
Re: Имитатор гидроцилиндра
Myp » 19 фев 2008, 11:00
конструкция действующая как гидроцилиндр имхо и есть гидроцилиндр 
что изобрести то нужно?
неких хитрый аппарат который будет работать также как гидроцилиндр но не являться гидроцилиндром??
или просто маленький гидроцилиндр?
Re: Имитатор гидроцилиндра
Широкий » 19 фев 2008, 11:05
Re: Имитатор гидроцилиндра
Digit » 19 фев 2008, 11:14
Широкий , а зачем изобретать? Тут на сайте была чудная самобеглая тележка (черный пластиковый корпус в виде параллепипеда), у которой на спине был двухсегментный манипулятор именно с таким приводом.
К тому же, принципиально, это не «имитатор гидроцилиндра», а вполне традиционная винтовая передача. При чем тут имитатор — не ясно. Сам же обозначил, что в гидравлике проблема не цилиндры, а управляемые, легкие и достаточно дешевые электроклапана. И в этом плане имитации гидравлики не получается.
И вообще, нафига ее имитировать? Надо использовать те приводы, которые тебе доступны, и которые применимы в данной конструкции. И все.

В общем, чего ты хочешь я примерно понял, но зачем и почему именно имитация?
Re: Имитатор гидроцилиндра
Широкий » 19 фев 2008, 11:28
Re: Имитатор гидроцилиндра
Digit » 19 фев 2008, 11:44
У нормальной винтовой передачи никаких больших люфтов и в помине нет! И трение там не такое уж, чтоб переживать. К тому же ты ж сам хочешь, чтобы передача была самотормозящая — не будет трения, она держать не будет! 
Ссылка на то, что делалось, вот: http://www.roboforum.ru/viewtopic.php?f=10&t=2067
И на самый главный вопрос ты так и не ответил.
Re: Имитатор гидроцилиндра
Duhas » 19 фев 2008, 12:52
Re: Имитатор гидроцилиндра
avr123.nm.ru » 19 фев 2008, 13:13
Если теоевизор не смотреть и не читать ни чего — то и не будет ни когда !
Re: Имитатор гидроцилиндра
lebaon » 19 фев 2008, 22:32
авр, это ты к чему сказал?
Re: Имитатор гидроцилиндра
Широкий » 20 фев 2008, 12:09
Все. Тормознул в формулировке. Нужен актуатор.
Задача — паук.
По ссылке конструкция понравилась. Теперь думаю как редуктор с двигателем в габариты диаметра актуатора впихнуть.
Где-бы найти игругшечный планетарный редуктор? раньше наши выпускали, помнится в «ЮТ» публикация была..
Хотелось-бы обеспечить влагозащищенность конструкции.
Re: Линейный привод — как сделать ?
avr123.nm.ru » 20 фев 2008, 13:44
ИМХО лучше бесщеточнй мотор BLDC — типа модельного безколлекторника — только с датчиками положения ротора. Ротор-гайка.
Такие продаются дорого и на форуме линк я вроде давал.
А резьбовой стержень в него ставишь нужно длины. Можно и гофром пыльником прикрыть.
Re: Линейный привод — как сделать ?
FireFly » 20 фев 2008, 20:21
avr123.nm.ru писал(а): ИМХО лучше бесщеточнй мотор BLDC — типа модельного безколлекторника — только с датчиками положения ротора. Ротор-гайка.
Такие продаются дорого и на форуме линк я вроде давал.
А резьбовой стержень в него ставишь нужно длины. Можно и гофром пыльником прикрыть.
Безколекторники имеют обороты бешеные и жрут немерянно энергии (эт «типа модельных») + прально — цена не хилая.
По идее напрашиваются шаговые движки в такую конструкцию, да и есть они готовые — линейные шаговые, тока то же энергопотребление не малое у них.
Более менее реально остается применить коллекторники с планетарным редуктором и встроенным энкодером (что бы габариты не сильно пугали). гм. то же однако цена.  + все в кучу собрать..хм.
+ все в кучу собрать..хм.
в общем ИМХО для паука такой тип актуаторов не пойдеть (одно дело медленный и маломощный манипулятор) — скорость не фонтан, КПД аналогишно, работоспособная «наколенная» конструкция без доступа к станочному парку сомнительна.
Зря на сервы не хочешь обратить внимание — щас в продаже появляются достаточно небольшие, легкие, скоростные, с металлическими шестернями и подшипниками в редукторе + дурная мощща — гимору меньше, вполне возможно, что в результате дешевле получится чем огород городить, однозначно эффективнее и надежнее.
Шаговые двигатели
Шаговые двигатели могут использоваться для передвижения, перемещения, управления рулевым механизмом и позиционирования. Такие устройства находят применение в качестве интегрированных компонентов многих коммерческих и промышленных систем, управляемых компьютерами. В домашних персональных компьютерах шаговые двигатели можно обнаружить в приводах дисководов и в принтерах.
Уникальность шаговых двигателей в том, что ими можно управлять с помощью цифровых устройств. Такие двигатели могут осуществлять повороты на точно заданный угол. Это свойство делает шаговые двигатели идеальными для задач линейного и кругового позиционирования. Широкое использование шаговых двигателей в промышленности обуславливает широкий ассортимент моделей по форме, размерам и иным свойствам (см. рис. 4.8А).

Рис. 4.8А. Шаговый двигатель
При подаче напряжения на стандартный электрический двигатель его ротор начинает непрерывно вращаться. Скорость и фаза вращения ротора являются функцией напряжения, нагрузки на двигатель и времени. Определение точной фазы (положения) ротора в этом случае невозможно.
В отличие от этого, питание шагового двигателя осуществляется серией электрических импульсов, подаваемых на обмотки двигателя. Каждый импульс, поданный на обмотки, поворачивает ротор на строго определенный угол. Такой поворот называется шагом, отсюда двигатель получил название шагового.
Не существует единой величины шага для шаговых двигателей; выпускаются устройства с различными углами поворота на один шаг (импульс). Номинальная величина такого шага зависит от характера применения двигателя. Величины углов поворота обязательно указаны в спецификации устройства. Можно найти шаговые двигатели с углами поворота от долей градуса (например, 0,72°) до десятков градусов (например, 22,5°)
Данный текст является ознакомительным фрагментом.
Продолжение на ЛитРес
Читайте также
Советские ядерные двигатели
Советские ядерные двигатели В Советском Союзе работы над ядерными ракетными двигателями начались в середине 50-х годов. В НИИ-1 (научный руководитель — Мстислав Келдыш) инициатором и руководителем работ по ЯРД был Виталий Иевлев. В 1957 году он сделал по этой теме сообщение
Электротермические двигатели
Электротермические двигатели Нам уже известно, что одним из способов увеличения эффективности двигателей для космических кораблей является повышение температуры (а значит и скорости) истекающих газов. Но эту температуру можно поднимать не только с помощью химической
2. Вечные двигатели XVI и XVII столетий
2. Вечные двигатели XVI и XVII столетий Ранние искатели вечного движения редко доверяли бумаге свои мысли и изобретения, и хотя большинство первых печатных книг касалось наук и ремесел, лишь в некоторых из них можно найти упоминание о перпетуум мобиле.Вечный двигатель описан
Двигатели постоянного тока
Двигатели постоянного тока Двигатели постоянного тока для любительского конструирования могут использоваться для движения и перемещения конструкций роботов (см. рис. 4.13). Для большинства таких двигателей характерны высокая частота вращения ротора и небольшой крутящий
Шаговые двигатели
Шаговые двигатели B качестве ходовых двигателей платформы лучше всего использовать шаговые двигатели. Рассмотрим некоторые преимущества таких двигателей. Поскольку шаговый двигатель поворачивается на каждом шаге на строго определенный угол, микроконтроллер может
Шаговые двигатели
Шаговые двигатели На рис 10.11. изображена эквивалентная электрическая схема используемого нами двигателя. Двигатель имеет шесть проводников, выходящих из его корпуса. Рис. 10.11. Схема выводов однополярного шагового двигателяПредположим, что мы только что взяли двигатель
Двигатели заставляют мир вращаться
Двигатели заставляют мир вращаться Вентиляторами и насосами дело не кончается. Они приводятся в движение электродвигателями. Институт Рокки Маунтин в 1989 г. показал, как объединить 35 усовершенствований на участке между электрическим счетчиком и входным валом
Двигатели «МОТОР СИЧ» для российских вертолетов
Двигатели «МОТОР СИЧ» для российских вертолетов Вячеслав БОГУСЛАЕВ, председатель совета директоров ОАО «Мотор Сич»Ни для кого не секрет, что подавляющее большинство российских вертолетов сегодня оснащается двигателями производства запорожского ОАО «Мотор Сич».ОАО
§ 46. Двигатели внутреннего сгорания
§ 46. Двигатели внутреннего сгорания Двигатели внутреннего сгорания (ДВС) являются поршневыми тепловыми двигателями, в которых топливо сгорает непосредственно внутри рабочего цилиндра. Образующаяся при сгорании смесь газов, расширяясь, перемещает поршень, совершающий
Часть первая. Двигатели фантастических скоростей
Часть первая. Двигатели фантастических скоростей Глава I. На дальних подступах В этой главе рассказывается о последних успехах поршневых авиационных двигателей и закате их славы, о том, почему они не смогли преодолеть «звуковой барьер» и навсегда потеряли свое былое
Глава V. Двигатели-гибриды
Глава V. Двигатели-гибриды Эта глава знакомит читателя с некоторыми новыми двигателями, представляющими разнообразные сочетания уже известных двигателей и обладающими замечательными свойствами, что позволяет думать об их почетном месте в авиации будущего.Времена,
2.10.1. ЭЛЕКТРИЧЕСКИЕ ДВИГАТЕЛИ
2.10.1. ЭЛЕКТРИЧЕСКИЕ ДВИГАТЕЛИ Важнейшими научными предпосылками электромеханики послужили достижения в области электродинамики и открытие электромагнитной индукции. Свою положительную роль при разработке первых конструкций электрических машин и электромагнитных
6.2.12. АСИНХРОННЫЕ ДВИГАТЕЛИ
6.2.12. АСИНХРОННЫЕ ДВИГАТЕЛИ Массовое применение асинхронных двигателей потребовало их серийного выпуска как в предвоенные, так и в послевоенные годы. В 70-х годах наиболее широкое распространение получили короткозамкнутые асинхронные двигатели общего назначения серии
Включай двигатели, железный человек, будем пробиваться через заторы Полноприводный Audi R8 5.2 FSI S Tronic
Включай двигатели, железный человек, будем пробиваться через заторы Полноприводный Audi R8 5.2 FSI S Tronic Интересно, а критик Э. Гилл пишет ресторанные обзоры, если у него простуда? Потому что, конечно, если у вас в глазах слезы, голова заполнена жидкой ртутью, а из носа капает,
Шаговый двигатель NEMA 23
Опубликовано 07.04.2021 · Обновлено 16.04.2021
Шаговый двигатель NEMA 23
NEMA 23 — это шаговый двигатель с лицевой панелью 2,3 × 2,3 дюйма (58,4 × 58,5 мм) и углом шага 1,8 ° (200 шагов / оборот). Каждая фаза потребляет 2,8 А при 3,2 В, что обеспечивает удерживающий момент 19 кг-см. Шаговый двигатель NEMA 23 обычно используется в принтерах, станках с ЧПУ, линейных приводах и жестких дисках.
Этот двигатель имеет четыре провода с оголенными выводами: черный и зеленый, подключенные к одной катушке; Красный и Синий связаны друг с другом.
Технические характеристики шагового двигателя NEMA 23
Номинальное напряжение: 3,2 В
Текущий рейтинг: 2,8 А
Удерживающий момент: 270 унций. в
Угол шага: 1,8 град.
Шагов на оборот: 200
Количество фаз: 4
Длина двигателя: 3,1 дюйма
Количество выводов: 4
Индуктивность на фазу: 3,6 мГн
Примечание. Спецификацию шагового двигателя NEMA 23 можно найти внизу страницы.
Другие шаговые двигатели
Nema 14, Nema 17, Nema 34, 28BYJ-48 Шаговый двигатель
Другие двигатели
Двигатель постоянного тока, двигатель постоянного тока 12 В, серводвигатель, двигатель BLDC
NEMA 23 Описание
NEMA 23 — это гибридный биполярный шаговый двигатель с высоким крутящим моментом и лицевой панелью 2,3 × 2,3 дюйма. Этот двигатель имеет угол шага 1,8 градуса, это означает, что он имеет 200 шагов на оборот, и каждый шаг будет покрывать 1,8 градуса. Двигатель имеет четыре провода с цветовой кодировкой (черный, зеленый, красный и синий), оканчивающиеся оголенными выводами. Черно-зеленый провод соединен с одной катушкой; Красный и Синий связаны друг с другом. Этот двигатель может управляться двумя Н-мостами, но рекомендуется использовать драйвер шагового двигателя.
Как использовать шаговый двигатель NEMA 23
Как упоминалось выше, этот шаговый двигатель потребляет большой ток, поэтому вместо прямого управления им с помощью H-мостов используйте соответствующий мощный драйвер шагового двигателя. Чтобы узнать, как заставить этот двигатель вращаться, мы должны взглянуть на схему катушки ниже.
Как вы можете видеть на схеме выше, у этого двигателя четыре провода разного цвета. Этот двигатель можно заставить вращаться, только если катушки запитаны в логической последовательности. Эта логическая последовательность может быть запрограммирована с помощью микроконтроллера или путем разработки цифровой схемы.
Применение шагового двигателя
Станки с ЧПУ
Машины точного управления
3D-принтеры машины для создания прототипов (например, RepRap)
Лазерные резаки
Подбирайте и размещайте машины

