
Регулирование скорости двигателей постоянного тока
Регулирование скорости двигателей постоянного тока
 Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U . Ток в цепи якоря I я и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Рассмотрим первый способ регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря . Схема включения двигателя для этого случая представлена на рис. 1 , а электромеханические и механические характеристики — на рис. 2 , а.
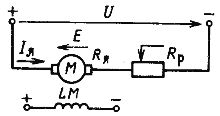
Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
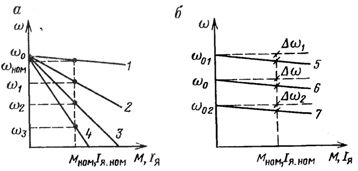
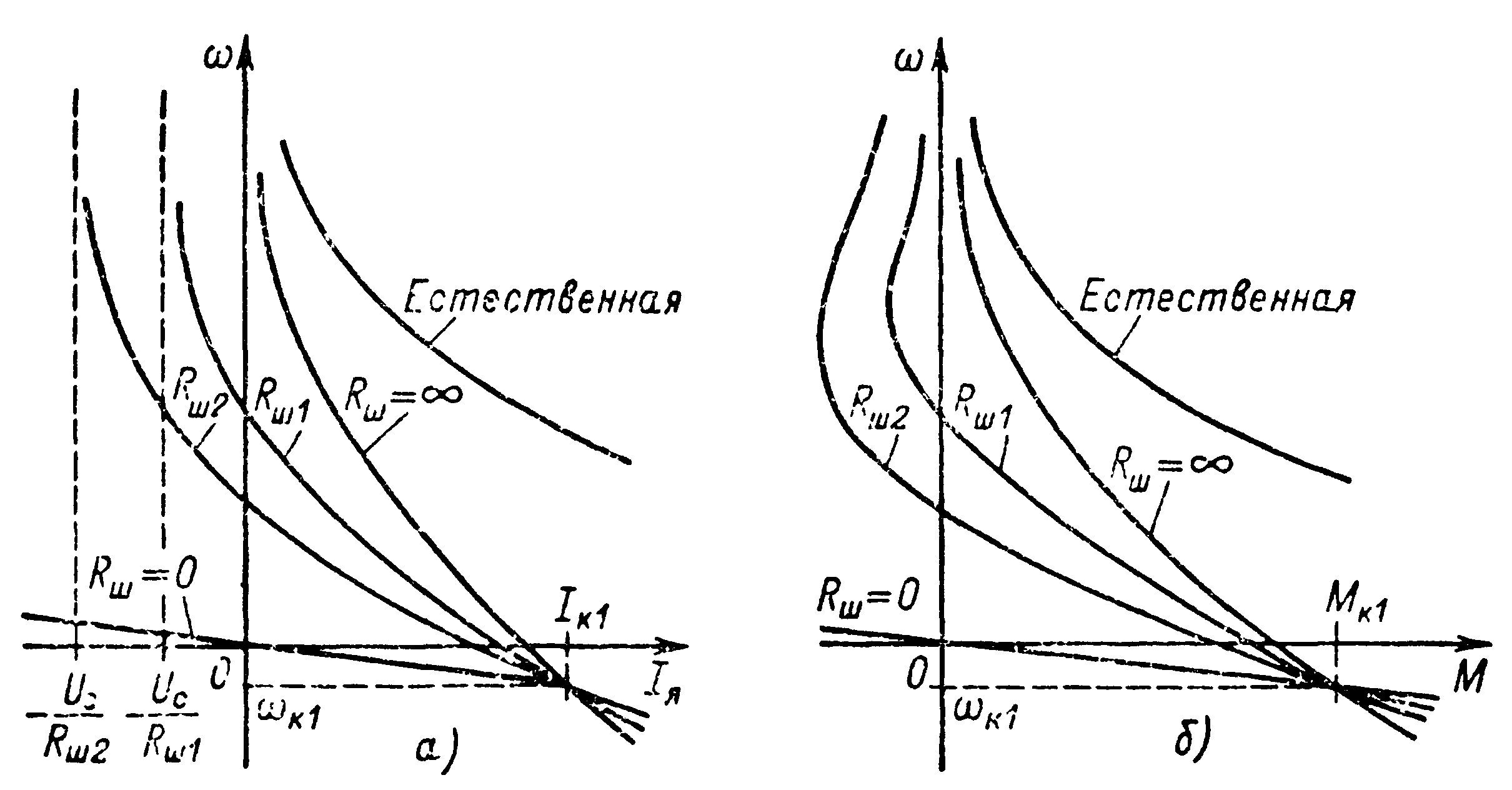
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Проведем анализ данного способа регулирования угловой скорости двигателей постоянного тока с помощью основных технико-экономических показателей. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен ( D = 2 — З).
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.
 При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 — 4 .
Механические характеристики для различных значений потока двигателя приведены на рис. 2 , а и 2 , б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и U ном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Шунтирование двигателя что это такое
Не имел дела с машинами постоянного тока, у нас везде были асинхронные переменного, но в теории ИМХО так:
При достижении определенной частоты вращения якоря при максимальном напряжении возникает противоэдс, двигатель теряет крутящий момент на валу, если еще увеличить скорость вращения начнется генераторный режим, применительно к ЖД рекуперативное торможение.
Поскольку напряжение поднимать уже некуда (уперлись в электрическую прочность изоляции), а ехать быстрее очень хочется начинают шунтировать ОВ, это приводит к снижению тока в обмотке и поля соответственно, что смещает точку генераторного режима и при той же скорости вращения и напряжении, на валу снова возникает крутящий момент, мощность двигателя возрастает.
А вот почему она возрастает интересно.
А вот почему она возрастает интересно. потому что катушки якоря создают тем большее реактивное сопротивление, чем больше частота проходящего по цепи тока. А частота равна числу раз замыкания-размыкания каждой из обмоток якоря за одну секунду (т.е. удвоенной частоте якоря)
начинают шунтировать ОВ, это приводит к снижению тока в обмоткесуммарный ток через обмотку и шунт наоборот, возрастает. Почему — написано выше.
Вобщем, объясню так. В коллекторном двигателе есть такое понятие, как противоЭДС. Это так сказать, сопротивление якоря. Оно растёт с ослаблением поля якоря, т.к. последний начинает вращаться БЫСТРЕЕ. От чего начинают быстрее переключаться обмотки. От этого поле статора становится сильнее поля якоря, и возрастает противоЭДС, и как следствие активное сопротивление. Ток падает. А вот теперь мы подключили шунт к ОВ. Так вот шунт взял часть тока на себя, поле ослабло. Поле якоря стало сильнее, сопростивление упало, ток возрос. От этого Поднимается мощьность ТЭДа. А тепеь фишка.
Полезная мощьность ТЭД прямопропорциональна току якоря и обратна току статора. Так вот на ослабленном поле у ТЭДа максисальное КПД. Току тратится столько же, а вот полезная мощьность больше. Вот поэтому на шунтах ездить экономней. Проверенно. Но поле бесконечно ослаблять нельзя. Есть определённая кривая ТЭДа. Она зависит от конструкции ТЭД и железа из которого он сделан.
Поскольку напряжение поднимать уже некуда (уперлись в электрическую прочность изоляции), а ехать быстрее очень хочется начинают шунтировать ОВ
Напряжение на ТЭД не совсем падает. Просто от того что ты дал шунта резко увеличился ток и под действием тока и собственых потерь «просела» ВУ.
ЧТо я и сделал на ВЛ80С-985. Кстати на полном поле куда просче вынести движки при номинальном напряжении, чем на ослабленном, даже при небольшом перенапряжении
Кхм. Ни одного правильного ответа. В целом есть мысли, но от и до — нифига.
Значит так:
Наш объект исследований — один ТЭД электровоза (последовательно соединенные обмотка якоря (ОЯ) и обмотка возбуждения (ОВ) и, замыкающий цепь, включенный им последовательно источник напряжения (U = const).
Первое. Замыкаем цепь, электровоз стоит — частота вращения вала ТЭД нулевая (n = 0). Через двигатель пошел ток, определяемый только его сопротивлением (Rоя + Rов). У двигателя появился крутящий момент, равный:
M = с1*Iя*Ф;
где Iя — ток якоря (и на данный момент всего двигателя, т.е. и ОВ тоже);
Ф — магнитный поток обмотки возбуждения, который, грубо говоря пропорционален ее току;
с1 — постоянный коэффициент.
Т.е. чем больше токи ОВ и ОЯ, тем ТЭД сильнее тянет.
Второе. Появилась сила тяги (момент), электровоз поехал. И, так как любая электрическая машина обратима, то двигатель «стал» генератором, вернее пытается им стать .
ЭДС, вырабатываемая в ОЯ равна:
Eя = c2*Ф*n;
где n — частота вращения вала ТЭД (ну или скорость электровоза);
с2 — также постоянный коэффициент.
Следовательно напряжение, приложенное к сопротивлению обмоток ТЭД, снижается (ведь появилась генераторная ЭДС, направленная против напряжения, приложенного к двигателю). Ток двигателя начинает падать.
Вместе с ним падает магнитный поток ОВ (он же пропорционален току).
А еще вместе падает сила тяги — это же произведение Ф и Iя.
Наступает такой момент, когда сила тяги сровнялась с сопротивлением движению на данной скорости и ток больше не падает, а скорость не растет.
// Необольшое отступление: рассмотрен безреостатный пуск без перегруппировки. Камни не кидать — текст учебный. ))))
Что же делать?
Чтобы увеличить силу тяги надо увеличить ток ОЯ или Ф.
— Если увеличить Ф, то возрастет и ЭДС (см. вторую формулу) следовательно ток упадет. Плохо.
— Увеличить ток ОЯ сам по себе сложно (там же последовательное соединение ОЯ и ОВ).
А вот если уменьшить Ф? Шунтируем ОВ резистором. Часть тока пойдет через резистор и ток ОВ уменьшится. А вот ток ОЯ напротив увеличиться, ведь общее сопротивление движка стало меньше. Так как ток ОВ уменьшился, то уменьшился Ф.
Посмотрим по второй формуле: уменьшился магнитный поток ОВ, следовательно ЭДС якоря упала. Увеличивается общий ток и ток якоря двигателя. Момент на валу ТЭД начинает также увеличиваться. Увеличивается скорость. и т.д.
Если быть внимательным, то можно заметить, что при уменьшении магнитного потока Ф, которое достигается при шунтировании ОВ резистором (а это и есть ослабледние поля), один множитель формулы момента на валу растет (Iя), а другой уменьшается (Ф). Но из-за нелинейной зависимости Ф от Iов ток якоря растет сильнее, чем уменьшается магнитный поток, и, следовательно, ослабление поля позволяет увеличить силу тяги (и скорость) электровоза без дополнительного увеличения напряжения на ТЭД.
P.S. И еще маленькое замечание: коэффициенты с1 и с2 зависят от параметров тягового двигателя, а также от используемых единиц измерения. Если все мерить в системе СИ (даже частоту вращения в рад/сек), то эти коэффициенты равны между собой и рассчитываются исходя из параметров обмоток двигателя.
Хочу добавить к сказанному Aleks’ом. Для лучшего восприятия.
Подключение сопротивления параллельно ОВ ТЭД правильнее называть не ослаблением поля, а увеличением тока якоря.
Замечу, что при одном токе якоря сила тяги ТЭД ниже при ослабленном поле.
Евгению: КПД двигателя в режиме ОВ ниже. Сопротивление в цепи ТЭД — оно что, КПД повышает?
Забору: ТЭД последовательного возбуждения не перейдёт автоматически в режим электрического торможения, если его раскрутить посильнее. Если на валу двигателя нет нагрузки, он пойдёт вразнос, пока не развалится (обычно разрывается бандаж якоря и разваливается его обмотка + круговой огонь).
Аналитику: электрическое торможение и реализуется переключением ТЭДов с последовательного на независимое возбуждение. Беда в том, что получение требуемых характеристик ЭПС при этом требует довольно сложной аппаратуры и, желательно, электронного управления. Это стало возможным у нас не так давно, да и то ещё не совсем получается (пример — ЭС4К).
Что если подключить ОВ и ОЯ к разным источникам? Это называлось ВЛ12 и было дорого и сложно.
позволяет реализовать ещё несколько интересных моментов вроде рекуперации (или я заблуждаюсь и оно реализуется совсем не так?) Именно так. ОВ запитывается от возбудителя (или ВУВ на переменниках) с измененным относительно тяги направлением тока.
Подключение сопротивления параллельно ОВ ТЭД правильнее называть не ослаблением поля, а увеличением тока якоря. Правильнее как раз-таки «ослабление поля» или «ослабление возбуждения» (старый вариант). ГОСТ такой.
Правильнее как раз-таки «ослабление поля» или «ослабление возбуждения» (старый вариант). ГОСТ такой.
Я имел ввиду физический смысл.
Чтобы разогнаться дальше — нужно увеличить силу тяги, для этого нужно увеличить ток якоря, для чего можно зашунтировать ОВ, чтобы снизить ЭДС вращения.
Дык я же не без нагрузки предлагал раскручивать, имелось в виду принудительное раскручивание вала при том же напряжении.
А кстати почему не перейдет в режим генератора?
. Что если подключить ОВ и ОЯ к разным источникам?
Получится схема с независимым возбуждением.
В этом случае ослабление поля можно сделать плавным.
Дык я же не без нагрузки предлагал раскручивать, имелось в виду принудительное раскручивание вала при том же напряжении.
А кстати почему не перейдет в режим генератора?
Ну вот представьте: частота вращения двигателя постоянного тока
где
U — напряжение, приложенное к цепи двигателя;
Ia — ток якоря;
R — суммарное сопротивление цепи якоря двигателя;
Ce — машинная постоянная;
Ф — магнитный поток главных полюсов.
Таким образом, частота вращения обратно пропорциональна току нагрузки. При нагрузке на валу менее примерно 25% от номинальной и номинальном напряжении двигатель идёт вразнос.
Если же мы понизим напряжение и попытаемся подкрутить двигатель от внешнего источника мех. энергии, компенсируя потери на трение, ЭДС вращения будет увеличиваться до тех пор (одновременно ограничивая ток двигателя), пока потребление энергии двигателем не сведётся только к нагреву обмоток Ia^2*R. Частота вращения же может быть какой угодно.
В пределе (R=0) ЭДС вращения сравняется с напряжением питания и всё — тока нет, возбужения нет и взяться ему неоткуда.
Поэтому генератор последовательного возбуждения самостоятельно работать не может, всегда нужно начальное возбуждение. Да и по характеристикам такой никому не нужен.
7.4. Схемы шунтирования якоря двигателя постоянного тока с последовательным возбуждением
Для маломощных двигателей с последовательным возбуждением применима потенциометрическая схема регулирования напряжения, приложенного к силовой цепи двигателя, аналогичная рассмотренной на рис. 7.4, а.Механические характеристики в этой схеме подобны характеристикам двигателя с последовательным возбуждением при различных напряжениях, но с увеличенным и изменяющимся от характеристики к характеристике суммарным сопротивлением якорной цепи.
Более благоприятная форма регулировочных механических характеристик получается в схеме шунтирования якоря, представленной на рис. 7.6, а.В этой схеме сопротивление шунтирует только обмотку якоря двигателя, а обмотка возбуждения включается последовательно в цепь добавочного сопротивленияRдоб. Как следствие, по сравнению с потенциометрической схемой здесь кроме снижения подведенного к цепи якоря двигателя напряжения достигается также эффект увеличения тока возбуждения за счет тока, протекающего поRШ. Благодаря последнему ток возбуждения при идеальном холостом ходеIя =0 и неpaвен нулю:

где α’Ш=RШ/(Rш +Rдоб +Rв), а скорость идеального холостого хода имеет ограниченное значение:
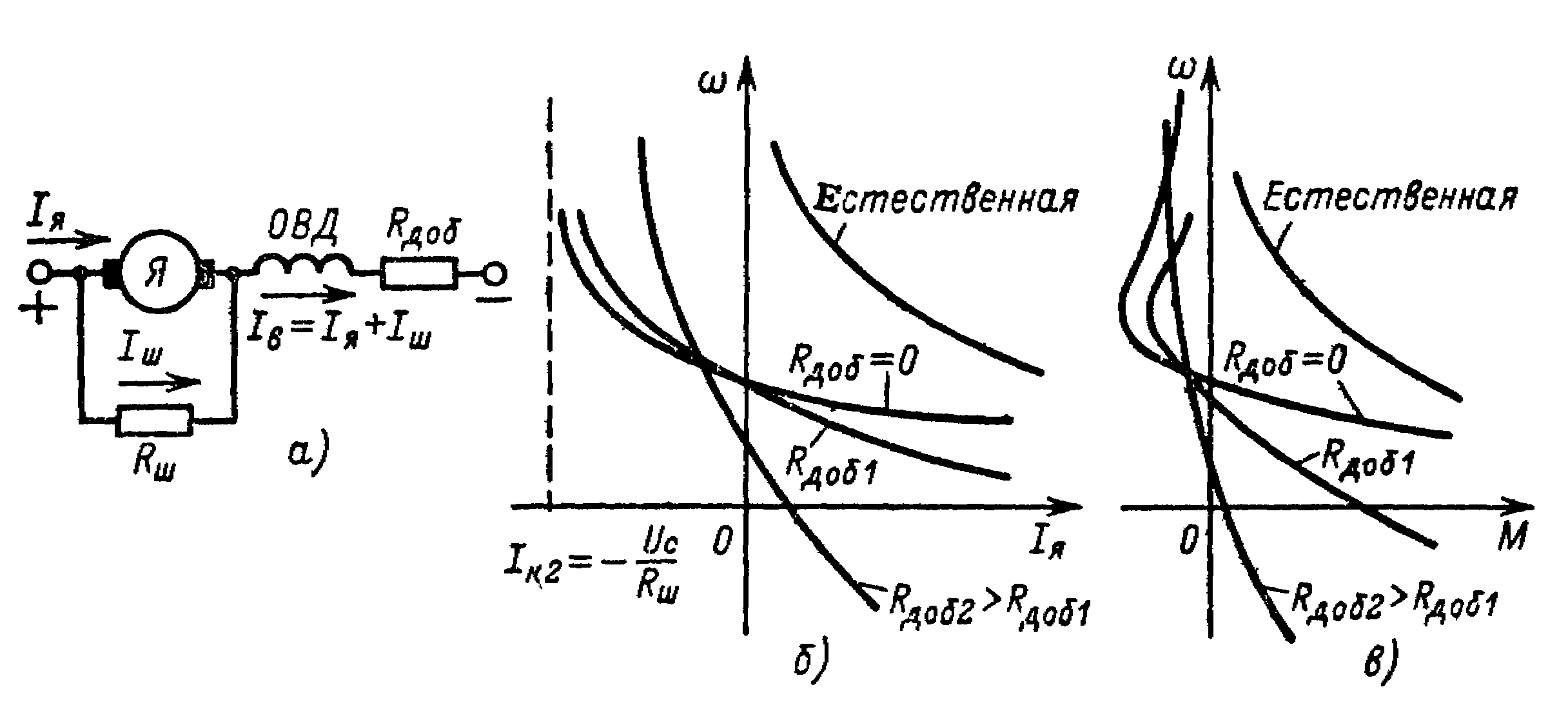
Рис. 7.6. Схема шунтирования якоря двигателя с последовательным возбуждением (а) и соответствующие ей электромеханические (б) и механические(в)характеристики приRШ=const,RДОБ=var
При ω> ω0Шдвигатель переходит в генераторный режим, в котором поступающая с вала механическая энергия преобразуется в электрическую и теряется в виде теплоты в сопротивленияхRЯи Ящ. Двигатель работает генератором параллельно с сетью на сопротивлениеRШ,и увеличение напряжения наRШпо мере роста скорости двигателя вызывает постепенное уменьшение потребляемого из сети тока, т. е. тока возбуждения. ПриIШRШ→UС IВ→ 0, а скорость двигателя неограниченно возрастает. Поэтому в области генераторного режима электромеханическая характеристика по мере роста скорости асимптотически приближается к прямой:iЯ=IK2=-UC/RШ. Так как при этом поток стремится к нулю, момент двигателя в генераторном режиме вначале возрастает, достигает максимума и в дальнейшем приω→∞ Μ=kФIя → 0, т. е. механическая характерно гика асимптотически приближается к оси ординат слева.
Электромеханические и механические характеристики в схеме шунтирования якоря двигателя с последовательным возбуждением на рис. 7.6, б и вприведены для случая, когдаRШ=const.RДОБ==var. Благодаря ограниченной скорости идеального холостого хода эти характеристики создают более благоприятные условия для регулирования скорости, чем характеристики в потенциометрической схеме.
Регулирование RШприRдоб=constдает семейство характеристик, приведенное на рис. 7.7,аи6.Аналогично потенциометрической схеме все эти характеристики пересекаются в одной точке, соответствующей IK1(МК1) и ωК1в которой падение напряжения в якоре уравновешивается его ЭДС. Эта точка определяется пересечением реостатной характеристики, соответствующейRдоб приRШ=∞, и характеристики динамического торможения с независимым возбуждением приRШ=0 и Φ=Φ1=const. где Φ1=f(IB1)=f[UС/(RВ+Rдоб)].
Рнс.7.7. Характеристики в схеме рис. 7.6априRдоб=const,Rш=var
В схеме шунтирования якоря (см. рис. 7.6, ) при определении допустимой нагрузки на регулировочных характеристиках необходимо учитывать, что в двигательном режиме Iв >Iя. Это вынуждает в качестве критерия допустимой нагрузки при постоянной теплоотдаче принимать номинальный ток обмотки возбужденияIдоп =Iв,ном =Iном, что обеспечивает регулирование при потоке, равном номинальному, но требует по мере снижения скорости уменьшения момента Мдоп 4 / 14 4 5 6 7 8 9 10 11 12 13 14 > Следующая > >>
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Способы перехода с одного соединения тяговых двигателей на другое
Описание электропоездов и электровозов, расписание поездов, фотографии
§ 84. Способы перехода с одного соединения тяговых двигателей на другое
Переход с одного соединения тяговых двигателей на другое стремятся осуществлять так, чтобы в течение его общее тяговое усилие всех двигателей и каждого в отдельности менялось возможно меньше, переходные процессы протекали плавно, схема перехода и применяемые для переключения аппараты были более простыми. На э. п. с. постоянного тока применяют следующие способы перехода: коротким замыканием части двигателей, шунтированием части двигателей резисторами, по схеме моста н с помощью диодов.
Переход коротким замыканием. При
трех группировках двигателей на безреостатной позиции последовательного соединения (С) включены контакторы 1—14 (рис. 234, а и г). Контакторами 6—11 выводятся из цепи тяговых двигателей резисторы /?2 и Р,3, при включении контактора 4 подготовляется переход на последовательно-параллельное соединение (СП) групп двигателей Чтобы уменьшить бросок тока в цепи при шунтировании двигателей М4—Мб, что может привести к резкому увеличению тяго-
вого усилия, вызвать боксование колесных пар и круговой огонь на коллекторах двигателей М1—МЗ, вначале в цепь двигателей М1—Мб выключением контакторов 7—11 вводятся резисторы #2 и ИЗ (переходная позиция П1).
Переход на последовательно-параллельное соединение начинается включением контактора 15, который шунтирует двигателями М4-—Мб, а двигатели М1— МЗ соединяет с землей (позиция П2). Затем выключается контактор 13, размыкая цепь двигателей М4—Мб (позиция ПЗ). Переход заканчивается на 1-й реостатной позиции последовательно-параллельного соединения включением контакторов 17 и 16, которые подсоединяют к уравнительному соединению соответственно последовательно соединенные резисторы /?/ и Р,3 и двигатели М4—Мб. Уравнительное соединение необходимо для выравнивания напряжения между параллельными группами тяговых двигателей и их нагрузки, если сопротивления параллельных цепей резисторов не равны.
При переходе с последовательно-параллельного соединения двигателей на параллельное, как и во время перехода с последовательного соединения на последовательно-параллельное, выключением

Рис. 234 Схемы (а и д), диаграммы изменений тока и силы тяги (бив) и таблица (г) последовательности включения контакторов при переходе с последовательного на последовательно-параллельное соединение двигателей коротким замыканием
реостатных контакторов вводится в цепь двигателей часть пускового реостата. Затем, включившись контакторы 18 и 19, шунтируют двигатели МЗ и М4, а контакторы 12, 14 и 15 размыкают их цепь. Переход заканчивается на 1-й реостатной позиции параллельного соединения включением контакторов 13, 20, 21 и 22.
Изменение тока в двигателях при переходе с последовательного на последовательно-параллельное соединение групп двигателей можно проследить по диаграмме рис. 234, б. До момента Л двигатели М1—Мб включены последовательно и ток в их цепи А_б. В момент /д, то он уменьшается при переходе на параллельное соединение до 1’2, соответственно уменьшается и сила тяги. Если /,

