Электротехника и электрооборудование — Синхронные электродвигатели
Электротехника и электрооборудование — Синхронные электродвигатели
Содержание материала
- Электротехника и электрооборудование
- Счетчики электрической энергии
- Мегомметры
- Измерение неэлектрических
- Асинхронные двигатели
- Пуск асинхронных двигателей
- Регулирование скорости асинхронных
- Данные асинхронных двигателей
- Синхронные машины
- Передвижные электростанции
- Синхронные электродвигатели
- Машины постоянного тока
- Генераторы постоянного тока
- Двигатели постоянного тока
- Электропривод генератор-двигатель
- Трансформаторы
- Конструкция трансформаторов до 10
- Данные трансформаторов до 10
- Специальные трансформаторы
- Измерительные трансформаторы
- Аппаратура управления и защиты
- Аппаратура автоматическая
- Реле защиты и управления
- Логические элементы
- Электропривод на строительстве
- Выбор электродвигателя
- Схемы электроприводы
- Электропривод строительных
- Сварочное электрооборудование
- Электрическое освещение
- Устройство освещения
- Нормы освещенности
- Электрические сети строительные
- Аппаратура подстанций
- Электрические сети
- Устройство электрических сетей
- Выбор сечения проводов
- Безопасность обслуживания
- Защитное заземление
По своему устройству синхронный двигатель аналогичен синхронному генератору, но он имеет дополнительную пусковую обмотку. Принцип действия синхронного двигателя основан на взаимодействии полюсов вращающегося магнитного поля, созданного обмоткой статора, обтекаемой трехфазным током, с магнитными полюсами ротора, обмотки которого питаются постоянным током. Скорость вращения синхронного двигателя постоянна независимо от нагрузки и равна скорости вращения магнитного поля; по этой причине двигатель получил название синхронного; вращение ротора у него совпадает (синхронно) с вращением магнитного поля статора. Механическая характеристика двигателя, т. е. скорость его вращения, зависящая от нагрузки, является абсолютно жесткой, при которой число оборотов постоянно.
Пуск двигателя в ход производится после предварительного его разгона по скорости, равной не менее 0,95 номинального числа оборотов, что осуществляется наличием специальной пусковой обмотки типа беличьего колеса, как у асинхронного двигателя. Такой способ пуска называется асинхронным. После разгона двигателя включается постоянный ток в обмотку ротора, полюса которого входят в синхронизм с, полюсами вращающегося магнитного поля. Некоторые типы синхронных двигателей пускают в ход с помощью других двигателей.
При холостом ходе оси полюсов ротора и вращающего поля статора двигателя совпадают. При увеличении нагрузки двигателя происходит сдвиг оси полюсов ротора относительно полюсов поля статора на угол φ и при некоторой максимальной нагрузке двигатель выпадает из синхронизма и останавливается в результате слабого взаимодействия между полюсами ротора и статора, обусловленного значительным расстоянием между ними. Максимальный (опрокидывающий) момент синхронного двигателя в 2,5-3 раза превышает номинальный его момент при нормальном токе возбуждения. Изменение угла между осями полюсов ротора и статора приводит к изменению угла сдвига фаз между напряжением и электродвижущей силой синхронного двигателя.
Преимущество синхронных двигателей заключается в возможности работать с высоким коэффициентом мощности cos φ.
Регулирование cos φ синхронного двигателя достигается изменением величины постоянного тока возбуждения машины, при определенной величине которого можно получить значение коэффициента мощности, равное единице.
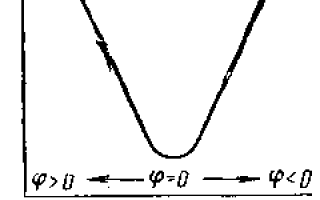
В отличие от двигателей постоянного тока, у которых при изменении тока возбуждения изменяется скорость вращения, у синхронных двигателей скорость остается постоянной, не зависящей от тока возбуждения. Однако при этом в больших пределах может изменяться ток статора синхронного двигателя при постоянной нагрузке на его валу и постоянной потребляемой мощности. При постоянной потребляемой мощности двигателя Р — ]/3/U cos φ и постоянной! приложенном напряжении U ток I будет зависеть от cos φ, т. е. при уменьшении cos φ ток будет увеличиваться. В то же время угол φ сдвига фаз между напряжением и током двигателя зависит от тока его возбуждения.
Рис. 7.17. U-образная кривая зависимости рабочего тока синхронного двигателя от тока возбуждения 
Влияние величины тока возбуждения на угол сдвига фаз и на величину тока двигателя при постоянной нагрузке на графике имеет вид U-образной кривой (рис. 7.17). Из графика видно, что при уменьшении тока возбуждения ниже номинальной величины ток в цепи статора возрастает (левая часть кривой), но при этом угол сдвига фаз положителен φ > 0, т. е. ток отстает от напряжения. При увеличении тока возбуждения свыше номинальной величины (правая часть кривой) рабочий ток / двигателя также увеличивается, но при этом угол сдвига фаз будет отрицательный!: φ Назад
Сравнение синхронных и асинхронных двигателей
 На рис.7.7 приведены характеристики синхронных двигателей СДВ 17-39-12 и СДВ-17-59-12 (С – синхронный, Д – двигатель, В – для привода вентиляторов, 17 – габарит, 39 и 59 – длина сердечника статора, см, 12 – число полюсов) и ВДС 325/49-16. Характеристики синхронных двигателей (рис.7.7) имеют ряд преимуществ по сравнению с характеристиками АД с короткозамкнутым ротором [9], [10]:
На рис.7.7 приведены характеристики синхронных двигателей СДВ 17-39-12 и СДВ-17-59-12 (С – синхронный, Д – двигатель, В – для привода вентиляторов, 17 – габарит, 39 и 59 – длина сердечника статора, см, 12 – число полюсов) и ВДС 325/49-16. Характеристики синхронных двигателей (рис.7.7) имеют ряд преимуществ по сравнению с характеристиками АД с короткозамкнутым ротором [9], [10]:
• возможность работы с опережающим коэффициентом мощности;
• более низкие потери;
• синхронная частота вращения в независимости от нагрузки;
• возможность плавного регулирования реактивной мощности и более высокое качество напряжения в узлах нагрузки;
• способность сохранять устойчивую работу при колебаниях напряжения в питающей сети.
Последняя особенность связана с тем, что у синхронного двигателя максимальный момент пропорционален напряжению, а у АД – квадрату напряжения – рис.7.4.
Синхронные двигатели, наряду с наличием на роторе обмотки возбуждения, имеют и мощную демпферную систему, обеспечивающую пуск и разгон ротора до подсинхронной частоты вращения в асинхронном режиме, с замкнутой на гасительное сопротивление обмоткой возбуждения. По достижении подсинхронной частоты вращения осуществляется синхронизация двигателя путем включения АГП и доведение его частоты вращения до синхронной. Синхронизация усложняется при высоких коэффициентах загрузки двигателя, а в системе собственных нужд электростанций возможности разгрузки на период синхронизации отсутствуют – рис.7.7.
Недостатком синхронных электродвигателей является необходимость отключения АГП и перевод их в асинхронный режим даже при кратковременных глубоких понижениях питающего напряжения, связанных с неудаленными КЗ и ошибочным отключением рабочих вводов питания. При использовании синхронных двигателей на электростанциях они будут участвовать в самозапуске наряду с другими асинхронными двигателями в условиях более низких питающих напряжений по сравнению с пуском отдельного синхронного двигателя. При этом условия синхронизации усложняются.

Исходя из высокой чувствительности синхронных электродвигателей к глубоким понижениям напряжения, трудности синхронизации в условиях самозапуска, отсутствие необходимости компенсации реактивной мощности в системе СН ввиду небольшой удаленности синхронных генераторов, синхронные электродвигатели нашли ограниченное применение в системе СН электростанций. Синхронные электродвигатели используются для питания потребителей, не влияющих на немедленное прекращение технологического процесса: часть циркуляционных насосов, приводы компрессоров и вентиляторов, мельниц, дробилок. Перечисленные механизмы обычно имеют промежуточные бункеры топлива и запасы перекачиваемого рабочего тела в ресиверах.
В виде примера в табл.7.2 изображена мельница-вентилятор с приводным синхронным двигателем марки СДМЗ2-22-61-40УХЛ4, предназначенным для привода шаровых и стержневых мельниц. В обозначении типа:
С – синхронный, Д – двигатель, М – для привода мельниц, З – закрытого исполнения, 2 – вторая серия, 22 – габарит, 61 – длина сердечника статора, см, 40 – число полюсов, УХЛ4 – климатическое исполнение и категория размещения по ГОСТ. Пуск двигателя асинхронный прямой при номинальном напряжении сети с включением в цепь обмотки возбуждения разрядного сопротивления. В процессе пуска среднее напряжение на зажимах двигателя должно быть не менее 0,85Uном, минимальное напряжение в начале пуска – не менее 0,8Uном. Двигатель допускает два пуска подряд из холодного состояния или один пуск из горячего состояния при условии, что средний статический момент сопротивления механизма на валу за время пуска не превышает 0,8М ном при моменте инерции приводимого механизма не более указанного в табл.7.2. Возбуждение двигателя осуществляется от тиристорных возбудителей. Обращаем внимание на низкую частоту вращения электродвигателей серии СДМЗ2 в пределах 100 – 150 об/мин, на которые асинхронные двигатели не выпускаются.
Ротор / статор для синхронного двигателя
![]()
![]()

Описание товара
Конструированный, построенный и испытанный в фабрике мотора, твердые заметные роторы поляка соответствующие для применений требуя длинных кругов обязаностей. Этот ротор имеет твердые поляков и обмотку подмагничивания раздевать-на-края. Тела вала и поляка объединенной конструкции, произведенный от одиночной нормализованной вковки углерода стальной. После того как индукторные катушки приспособлены, стальные подсказки или ботинки поляка скреплены болтами к телам поляка используя стальные винты поляка. Катушки конструкции раздевать-на-края с изоляцией интер-поворота эпоксидной смолы пропитали неорганическую бумагу вылеченную под жарой и давлением сделать полностью консолидированные блоки с представлением h класса. На интервалах вниз с каждой стороны катушки, индивидуальные повороты могут быть расширенны сформировать fi ns для увеличения внешней поверхностной области и таким образом для того чтобы улучшить охлаждающее действие. Катушки собраны на эпоксидной смоле скрепили стеклянные слоистые шайбы. Каждый полностью изолированный блок катушки после этого установлен на своем заметном поляке с соответствующим задерживая расположением для обеспечения что держится твердо против поляка во время нормальных условий обслуживания.
Объединенные подсказки или ботинки поляка на этом роторе подвергаются механической обработке от одиночной вковки ротора. Все другие особенности эти же как скрепленный болтами ротор подсказки. Твердые поляки держат обмотку подмагничивания раздевать-на-края.
Особенности & преимущества:
— Эффективность: Никакая сварка не приложила к пластинчатому сердечнику для обеспечения минимальных потерь в сердечнике.
— Надежность: Ядр зажатое под высоким равномерным давлением обеспечить жесткость.
— Безопасность: Улучшенная механическая стабильность от минимальных уровней вибрации.
— Сжатость: Ядр зажато под высоким равномерным давлением обеспечить жесткость.
— Стоимости сбережений: Компоненты Minimize вращая. Eliminates синхронизируя модуль
Конструированный, построенный и испытанный в фабрике мотора, твердые заметные роторы поляка соответствующие для применений требуя длинных кругов обязаностей. Этот ротор имеет твердые поляков и обмотку подмагничивания раздевать-на-края. Тела вала и поляка объединенной конструкции, произведенный от одиночной нормализованной вковки углерода стальной. После того как индукторные катушки приспособлены, стальные подсказки или ботинки поляка скреплены болтами к телам поляка используя стальные винты поляка. Катушки конструкции раздевать-на-края с изоляцией интер-поворота эпоксидной смолы пропитали неорганическую бумагу вылеченную под жарой и давлением сделать полностью консолидированные блоки с представлением h класса. На интервалах вниз с каждой стороны катушки, индивидуальные повороты могут быть расширенны сформировать fi ns для увеличения внешней поверхностной области и таким образом для того чтобы улучшить охлаждающее действие. Катушки собраны на эпоксидной смоле скрепили стеклянные слоистые шайбы. Каждый полностью изолированный блок катушки после этого установлен на своем заметном поляке с соответствующим задерживая расположением для обеспечения что держится твердо против поляка во время нормальных условий обслуживания.
Объединенные подсказки или ботинки поляка на этом роторе подвергаются механической обработке от одиночной вковки ротора. Все другие особенности эти же как скрепленный болтами ротор подсказки. Твердые поляки держат обмотку подмагничивания раздевать-на-края.
Особенности & преимущества:
— Эффективность: Никакая сварка не приложила к пластинчатому сердечнику для обеспечения минимальных потерь в сердечнике.
— Надежность: Ядр зажатое под высоким равномерным давлением обеспечить жесткость.
— Безопасность: Улучшенная механическая стабильность от минимальных уровней вибрации.
— Сжатость: Ядр зажато под высоким равномерным давлением обеспечить жесткость.
— Стоимости сбережений: Компоненты Minimize вращая. Eliminates синхронизируя модуль
сравнение АД и СД.
Синхронные двигатели имеют более сложную конструкцию, чем асинхронные двигатели с короткозамкнутым ротором. Для них наряду с сетью переменного тока необходимо иметь источник постоянного тока. Пуск синхронных двигателей сложнее, чем асинхронных, т. е. требуются более сложные пусковые устройства. Вместе с тем синхронные двигатели могут работать с cos ф = 1 независимо от нагрузки двигателя. Они менее чувствительны к колебаниям напряжения сети, так как их максимальный момент прямо пропорционален напряжению сети, тогда как у асинхронных двигателей Ма пропорционален квадрату напряжения. Для синхронных двигателей характерно строгое постоянство частоты вращения независимо от нагрузки на валу.
Сопоставление достоинств и недостатков синхронных двигателей показывает, что их более вьп-одно применять, чем асинхронные двигатели, при больших мощностях (начиная с 100 кВт и выше).
Чтобы остановить выбор на синхронном или асинхронном двигателе для приведения во вращение того или иного производственного механизма, необходимо иметь в виду следующее.
Обмотки статора обоих двигателей получают питание от сети трехфазного переменного тока. Для питания обмотки возбуждения синхронного двигателя требуется, кроме того, источник электрической энергии постоянного тока, правда, относительно небольшой мощности.
Асинхронный пуск синхронных двигателей несколько сложнее пуска асинхронных двигателей с короткозамкнутым ротором. В отношении пусковых свойств асинхронные двигатели с фазным ротором имеют весьма существенные преимущества перед синхронными двигателями.
Частота вращения синхронных двигателей остается постоянной при изменении нагрузки, тогда как у асинхронных двигателей даже при их работе на естественной характеристике она несколько изменяется.
Асинхронные двигатели дают возможность регулировать частоту вращения различными способами, рассмотренными в гл. 10. Использование некоторых из этих способов для регулирования частоты вращения синхронных двигателей в принципе невозможно, а некоторых связано с большими конструктивными и эксплуатационными трудностями. Учитывая это, следует иметь в виду, что синхронные двигатели относятся к двигателям с нерегулируемой частотой вращения.
Воздействуя на ток возбуждения синхронного двигателя, можно в широких пределах изменять его коэффициент мощности. Можно, в частности, заставить синхронный двигатель работать с cos φ = 1, а также с опережающим током. Последнее может быть использовано для улучшения коэффициента мощности других потребителей, питающихся от той же сети. В отличие от этого асинхронный двигатель представлет собой активно-индуктивную нагрузку и имеет всегда
cos φ
Точка А на рис. соответствует холостому ходу невозбужденной машины. При этом из сети потребляется намагничивающий ток. Угол нагрузки θ возрастает при движении вдоль кривых рис. справа налево, так как, при меньших if и Е угол θ при Р = const увеличивается. Линия АВ представляет собой границу устойчивости, на которой θ = θкр. При дальнейшем уменьшении if машина выпадает из синхронизма. U-образные характеристики генератора и двигателя практически не отличаются друг от друга.
19) . СД и СК. Реактивный СД. Синхронный генератор можно заставить работать в качестве электрического двигателя. У них обмотка статора питается трехфазным переменным током, а обмотка ротора подключается к источнику постоянного напряжения. При питании трехфазным переменным током обмотки статора синхронного двигателя возникает вращающееся магнитное поле. Скорость вращения поля зависит от частоты переменного тока и числа полюсов статора. Однако если после включения статора включить постоянный ток в обмотку ротора, то ротор будет стоять на месте. Самостоятельно он тронуться не может. Это объясняется тем, что магнитное поле статора, вращаясь с большой скоростью относительно неподвижного ротора, не может мгновенно сообщить ротору синхронную скорость и заставить его вращаться. Так как ротор обладает значительной массой и большой инерцией, он не в состоянии тронуться с места и развить необходимую скорость. Поэтому для пуска синхронного двигателя приходится применять специальные устройства. Синхронный двигатель имеет ценное качество. Если при малых токах возбуждения ротора он потребляет реактивный ток из сети и работает, как говорят, с отстающим cosφ, то, увеличивая ток возбуждения ротора, можно добиться того, что обмотка статора совсем не будет потреблять реактивный ток и cosφ в этом случае будет равен единице. При дальнейшем увеличении тока возбуждения ротора статор сам начнет отдавать в сеть реактивный ток, и синхронный Двигатель, продолжая нести механическую нагрузку, превращается одновременно в генератор реактивного тока или реактивной мощности. В этом случае двигатель будет как бы подобен конденсатору и станет работать с опережающим cosφ. Синхронный двигатель, предназначенный для улучшения cosφ установки, называется синхронным компенсатором. Реактивные микродвигатели. Синхронными реактивными называют микродвигатели с переменным вдоль окружности воздушного зазора магнитным сопротивлением (Xd≠Xq) и невозбужденным ротором. Вращающееся магнитное поле таких микродвигателей создается только МДС статора. Изменение магнитного сопротивления вдоль окружности воздушного зазора двигателя осуществляют путем выбора соответствующей формы и материала ротора.  |
Угол между осью потока (МДС) статора и продольной осью d ротора обозначим γ.
Пусть угол γ=0. Магнитные силовые линии проходят по пути наименьшего сопротивления и не деформируются. Электромагнитные силы притяжения ротора к статору Fэм имеют только нормальные составляющие, и электромагнитный момент равен нулю. Ротор занимает положение устойчивого равновесия. Если под действием внешнего момента Мвн принудительно повернуть ротор на угол γ по часовой стрелке, то магнитные силовые линии изогнутся. У сил появляются тангенциальные составляющие Ft, которые создают реактивный вращающий момент Мр, стремящийся повернуть ротор в исходное положение.
При повороте ротора на 90° силовые линии поля будут вновь проходить прямолинейно, не изгибаясь, но магнитное сопротивление в этом случае больше, чем при γ=0. Реактивный момент Мр=0, т.е. ротор находится в равновесии. Однако, если при γ=0 равновесие устойчивое, то при γ=90° равновесие неустойчивое, и достаточно малейшего возмущения, чтобы ротор вернулся в устойчивое положение максимальной магнитной проводимости или отличающееся от него на 180°. Положение устойчивого равновесия ротора будет при γ=0, 180° и неустойчивого – при γ=90°, 270°.
Таким образом, реактивный момент изменяется по закону Мр=Мр max sin 2γ и всегда стремится установить ротор в положение минимального магнитного сопротивления на пути потока двигателя. Обмотки статора двигателя создают вращающееся магнитное поле, и ротор увлекается реактивным моментом вслед за полем и вращается со скоростью поля.
20) РЕАКТИВНЫЙ СИНХРОННЫЙ ДВИГАТЕЛЬ явнополюсный синхронный электродвигатель без обмотки возбуждения. Магнитный поток создаётся реактивным током статора, потребляемым из сети, а вращающий момент — вследствие различия магнитных проводимостей ротора по продольной и поперечной осям полюсов. Запускается Р. с. д. методом асинхр. пуска за счёт токов, индуктируемых в массивном роторе двигателя вращающимся полем статора. Р. с. д. выполняют 1- и 3-фазными. Мощность Р. с. д. — обычно неск. Вт и редко превышает неск. сотен Вт. Благодаря простоте конструкции и отсутствию обмотки возбуждения, питаемой пост. током, Р. с. д. применяют в устройствах автоматики и телемеханики, в схемах синхронной связи, в аппаратуре звукозаписи, в радиолокации, в бытовых приборах, мед. аппаратуре и т. д.
Ша́говый электродви́гатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток подаваемый в одну из обмоток статора вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого (ферромагнитного) материала или из магнито-твёрдого (магнитного) материала. Шаговые двигатели с магнитным ротором позволяют получать бо́льший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.
Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки.
Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи.
Микродвигатели с постоянными. В рассматриваемых микродвигателях наиболее распространенными являются роторы с радиальным и аксиальным смещением постоянных магнитов и пусковой обмотки.  |
Ротор состоит из двух основных частей: постоянных магнитов 1, создающих магнитный поток возбуждения и обеспечивающих возникновение электромагнитного момента в синхронном режиме; короткозамкнутой пусковой обмотки типа «беличьей клетки» 2, уложенной в магнитопровод из электротехнической стали 3.
Принцип действия двигателей с постоянными магнитами такой же, как и двигателей с электромагнитным возбуждением . В реальных синхронных микродвигателях с постоянными магнитами магнитная система несимметрична и Xd≠Xq. Это наглядно выражено у микродвигателей радиальной конструкции, в которых магнитное сопротивление ротора по продольной оси d больше, чем по поперечной q, вследствие малой магнитной проницаемости материала постоянных магнитов 1 по сравнению с электротехнической сталью 2.