
Способы управления асинхронным двигателем
Способы управления асинхронным двигателем
Электропривод сегодня является основой большинства подъемно-транспортных, обрабатывающих комплексов. Одним из способов их плавной работы является векторное управление асинхронным двигателем, преобразующим электрическую энергию в механическую – вращение приводного вала и связанных с ним механизмов.
Что такое асинхронный двигатель?
Прежде чем переходить к модели, алгоритмам и системам управления электроприводом, нужно точно знать, что он собой представляет. Это позволяет выявить в его цепи такие моменты, которые можно будет использовать для организации плавного изменения ключевых характеристик (частота/скорость вращения, напряжение). Соответственно, можно определить параметры контроллера, разработать технологические карты для его размещения в шкафу и обслуживания.
Работа любого асинхронного двигателя базируется на возбуждении на контактных обмотках магнитного поля при подаче электричества от шкафа управления. Оно возникает на статоре – неподвижной части двигателя, которая состоит из кольцевого сердечника (магнитопровода), собранного из отдельных металлических пластин. Каждая из них имеет концентрические пазы на внутренней стороне кольца, которые при совмещении образуют продольные пазы. Они служат для намотки проволоки, составляющей основу статорной обмотки.

Также асинхронный двигатель имеет подвижную часть – ротор, совмещенный с приводным валом. Он также имеет пластинчатый сердечник с пазами, но уже на внешней стороне. Вместо проволоки используются медные прутки, которые по краям замыкаются пластинами (такой вариант двигателя называется с короткозамкнутым ротором).
За счет того, что частоты вращения магнитных полей статора и ротора отличаются, в обмотках последнего за счет индукции наводится электрический ток. Он, в свою очередь, побуждает электромагнитную силу, приводящую ротор в движение (вращение). Разница частот обычно называется скольжением. Его величина составляет порядка 2…10%.
Как можно управлять скоростью вращения двигателя?
Очевидно, что двигатель в обычном режиме работы от сети (электрического шкафа) имеет стандартную скорость/частоту вращения. Это ограничивает прямое его использование, вынуждая применять различные редукторные механизмы для понижения частоты до требуемой. Но даже тогда нет возможности динамично менять обороты, а вместе с ними, мощность, подачу, поскольку все равно остаются фиксированными частоты на выходе из двигателя и редуктора. Для расширения существующих рамок используют разные способы управления (частотные, импульсные, фазные и т. д), которые можно разделить на две большие группы:
- Скалярное. Как правило, используется на приводных двигателях компрессорных, вентиляторных, насосных и прочих механизмов, где требуется контроль скорости вращения или любого другого параметра, связанного с датчиками,
- Векторное. Это усовершенствованная концепция, которая предполагает раздельный, независимый контроль, изменение момента и магнитного потока. Токосцепление ротора поддерживается на постоянном уровне, что позволяет сохранить максимальный показатель момента.
Управление асинхронным двигателем
Отличие скалярного от векторного управления как раз заключается в возможности осуществления контроля возбуждения (потока). Фактически, он представляется как двигатель постоянного тока, имеющий независимые друг от друга обмотки. Такой подход позволяет создать подобную математическую модель системы работы контроллера.
Формы и схема векторного управления
Все существующие на сегодня системы векторного управления работой двигателей можно разделить на две группы:
- Датчиковые. Блок управления работой двигателя имеет с ним обратную связь по скорости, с помощью расположения на валу соответствующих датчиков,
- Бездатчиковые. Это системы, которые работают без датчиков скорости на основном валу.
Датчиковые системы являются более сложными, так как точность контроля составляет 1:10000. Бездатчиковые системы работают на уровне не более 1:100. Все частотники с учетом уровня создаваемых помех устанавливаются в центральных или отдельных шкафах.
Если представить все выше сказанное как наглядную схему, то получится нечто следующее:
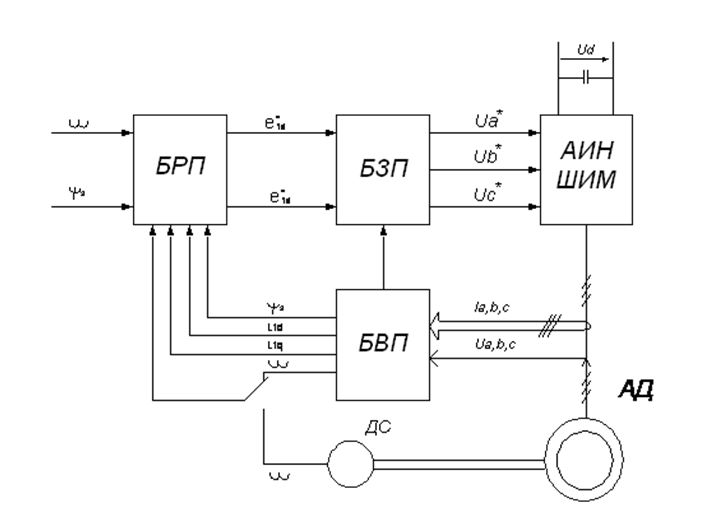
Здесь можно видеть такие ключевые компоненты системы управления, как:
- АД – собственно, асинхронный двигатель (объект контроля),
- БРП – логический блок регуляторов для переменных уравнения,
- БВП – логический блок, отвечающий за вычисления по переменным,
- БЗП – блок, задающий значения переменных,
- ДС – датчик скорости на валу двигателя,
- АИН ШИМ – блок амплитудно-импульсной/широтно-импульсной модуляции.
То, что на схеме отображено в виде блоков, на практике является всего лишь параметрическими элементами цепи управления, которая реализуется на микроконтроллере. Соответственно, сам контроллер и сопутствующие исполнительные механизмы монтируются в электрический шкаф. Для правильного монтажа разрабатывается технологическая карта.
Управление частотными контроллерами
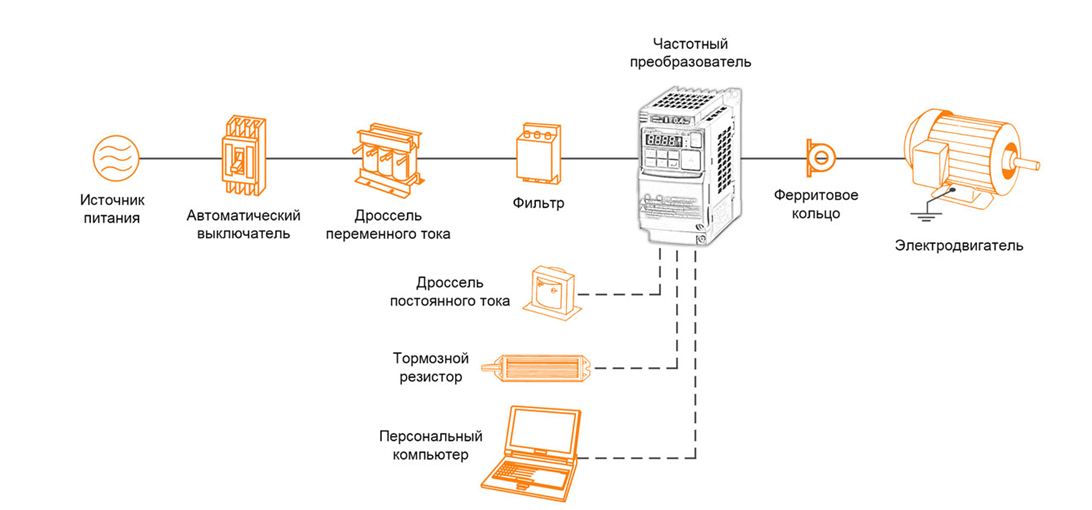
Современные преобразователи частоты тока/напряжения работают и по скалярному, и по векторному варианту, используя параметрические математические модели, реализованные в программном коде встроенного микроконтроллера. Частотники электронного типа работают на тиристорных мостовых схемах и включают следующие основные компоненты:
- Выпрямитель – тиристорный или транзисторный мост, преобразующий переменный ток в постоянный,
- Инвертор – блок АИМ/ШИМ, работающий по обратному принципу, то есть преобразующий постоянный ток в переменный.
Поскольку такой переход так или иначе влияет на форму графика выходного напряжения, то блочный контроллер/частотник может использовать в схеме дросселя и специальные ЕМС фильтры. Последние применяют для снижения интенсивности электромагнитных помех.
Управление частотными контроллерами
Центральный контроллер обеспечивает параметрическое управление схемой, а также вспомогательными задачами, например, диагностикой состояния, защитой от перегрузок и т. п. Сам частотник обычно монтируется в отдельный шкаф, чтобы уменьшить электромагнитные помехи на оборудование.
В целом, векторное управление, организованное на современном контроллере и преобразователе частоты, позволяет добиться плавного регулирования ключевых величин, а также побочных параметров работы оборудования. Ввиду наличия электромагнитных помех при работе, частотники обычно размещают отдельно от основного электрического шкафа.
Устройство и способ управления асинхронным электродвигателем
Патент 2193814
Устройство и способ управления асинхронным электродвигателем
Изобретение относится к электротехнике и может быть использовано в электроприводах с векторным управлением в качестве тяговых электроприводов на электропоездах. Техническим результатом является упрощение и обеспечение непрерывного управления во всем диапазоне скоростей. Устройство управления асинхронным электродвигателем содержит инвертор, преобразующий напряжение постоянного тока в переменный с регулируемой частотой и регулируемым напряжением в режиме широтно-импульсной модуляции, и схему регулирования выходного напряжения инвертора путем изменения глубины модуляции по командам на изменение выходного напряжения, осуществляемое по командам на изменение составляющих намагничивающей и моментообразующей тока статора асинхронного двигателя, на который подается напряжение от инвертора. Устройство управления содержит схему для измерения моментообразующей составляющей тока статора асинхронного двигателя, схему, которая корректирует команду на изменение намагничивающей составляющей тока статора в соответствии с различием между величинами измеренной компоненты намагничивающей составляющей тока статора и команды, схему, которая корректирует выходную частоту инвертора в соответствии с откорректированной командой на изменение намагничивающей составляющей тока статора и схему, которая ограничивает снизу глубину модуляции требуемой величиной или другими условиями. Устройство позволяет осуществлять надежное векторное управление асинхронным двигателем непрерывно в диапазоне от низких до высоких скоростей, при которых величина команды на изменение напряжения превышает максимальное выходное напряжение инвертора, определяемое напряжением постоянного тока. 2 с. и 3 з.п.ф-лы, 4 ил.
Изобретение относится к векторному управлению асинхронным электродвигателем, в частности к устройству и способу управления асинхронным двигателем, обеспечивающим возможность осуществления векторного управления даже в тех случаях, когда при высоких скоростях управление двигателем путем изменения электрического напряжения невозможно.
Векторное управление асинхронным электродвигателем, используемым в качестве тягового двигателя на электропоездах, описано в выложенной заявке на японский патент Hei 5-83976. В скоростных электропоездах для уменьшения потерь при переключении инвертора или для максимально эффективного использования напряжения источника питания постоянного тока (ПТ) для управления двигателем вместо широтно-импульсной модуляции (ШИМ) применяется моноимпульсная модуляция. Однако в обычном моноимпульсном режиме нельзя регулировать величину напряжения, а сделать это можно путем векторного управления, которое описано в публикации тридцать третьего Национального симпозиума по железнодорожной кибернетике «A vehicle drive system where a vector control is adopted», стр. 247-250 (ноябрь 1996).
Устройство для векторного управления, предложенное в указанной выше выложенной заявке на японский патент Hei 5-83976, имеет две схемы управления токами, которые для векторного управления корректируют два сигнала команд на изменение напряжения в соответствии с разницей между величиной команды на изменение намагничивающей составляющей тока и его фактически измеренной величиной и в соответствии с разницей между величиной команды на изменение моментообразующей составляющей тока статора и его фактически измеренной величиной, а также имеет третью схему управления током, предназначенную для преобразования частоты скольжения; при этом, однако, из-за усложнения конструкции устройства и выполнения команд с помощью микрокомпьютера возникает проблема, связанная с длительностью выполнения соответствующих команд. Далее, как сказано в приведенном выше документе «A vehicle drive system where a vector control is adopted», для векторного управления системой привода транспортного средства в моноимпульсном режиме в ней необходимо обеспечить корректировку магнитного потока, и, в частности, добавить в нее обратную связь для управления слабым магнитным полем. Кроме того, в обоих известных способах систему управления необходимо изменять при переходе от моноимпульсного режима модуляции к любому другому режиму.
Однако при векторном управлении, описанном в упомянутой выше выложенной заявке, возникает серьезная проблема, связанная с заменой ШИМ-модуляции моноимпульсной модуляцией и заключающаяся в том, что без регулирования напряжения векторное управление становится невозможным. Но решение этой проблемы остается открытым.
Задачей настоящего изобретения является создание более простого по конструкции устройства и более простого в осуществлении способа векторного управления асинхронным электродвигателем, в котором для максимально эффективного использования источника питания ПТ ШИМ-инвертора ШИМ-модуляция заменена моноимпульсной модуляцией и с помощью которого может осуществляться непрерывное векторное управление двигателем во всем диапазоне от низких до высоких скоростей с одним и тем же управляющим устройством.
Поставленная задача решается с помощью предложенного устройства управления асинхронным электродвигателем, содержащего инвертор, преобразующий постоянный ток в переменный с регулированием частоты при регулируемом напряжении посредством схемы формирования сигналов управления инвертора с широтно-импульсной модуляцией, и преобразователь полярных координат для регулирования выходного напряжения инвертора путем изменения глубины модуляции по команде на изменение выходного напряжения, которое осуществляется по команде на изменение намагничивающей составляющей тока в первичной обмотке тока асинхронного двигателя, на который подается напряжение от инвертора, и по команде на изменение компоненты напряжения, которые формируются схемой формирования команд на изменение напряжения в соответствии с упомянутыми соответствующими компонентами и выполняются в соответствии с командой на изменение моментообразующей составляющей тока статора.
Согласно изобретению в устройстве имеется преобразователь координат для измерения моментообразующей составляющей тока статора в соответствии с током в первичной обмотке асинхронного двигателя, регулятор тока для коррекции отклонения величины измеренной моментообразующей составляющей тока статора от величины соответствующего сигнала команды и формирования скорректированного сигнала команды на изменение моментообразующей составляющей тока статора, схема формирования команд на изменение угловой частоты скольжения для коррекции выходной частоты инвертора в соответствии со скорректированной величиной сигнала команды на изменение моментообразующей составляющей тока статора, и схема формирования команд на изменение глубины модуляции для ограничения величины глубины модуляции предварительно заданной большей величиной ограничения или произвольной величиной, при этом в течение времени, когда величина глубины модуляции ограничена предварительно заданной величиной ограничения, генератор команд на изменение тока генерирует команду на изменение намагничивающей составляющей тока, соответствующей предварительно заданной постоянной величине, и команду на изменение моментообразующей составляющей тока статора.
Предпочтительно глубину модуляции нормировать в соответствии с величиной, при которой измеряется напряжение VFC постоянного тока.
Предпочтительно также произвольно заданную величину ограничения глубины модуляции выбрать так, чтобы количество импульсов на полупериоде фазы выходного напряжения инвертора было равно 1.
Задача решается и с помощью предложенного способа управления асинхронным электродвигателем, в котором асинхронный двигатель управляется путем регулирования выходного напряжения инвертора, преобразующего постоянный ток в переменный с регулированием частоты при регулируемом напряжении и регулированием частоты при постоянном напряжении, за счет изменения глубины модуляции, которая выполняется по команде на изменение намагничивающей составляющей тока в первичной обмотке асинхронного двигателя, на который подается напряжение от инвертора, и по команде на изменение компоненты напряжения, которые формируются в соответствии с упомянутыми соответствующими компонентами и выполняются в соответствии с командой на изменение моментообразующей составляющей тока статора. Согласно изобретению после перехода от управления в режиме регулирования частоты при регулируемом напряжении к управлению в режиме регулирования частоты при постоянном напряжении глубину модуляции ограничивают предварительно заданной величиной и при увеличении выходной частоты инвертора величина сигнала команды на изменение намагничивающей составляющей тока увеличивается при условии, что ток поддерживают постоянной величины.
Ниже изобретение более подробно поясняется описанием вариантов выполнения со ссылкой на чертежи, которые показывают: на фиг. 1 — блок-схему устройства управления, выполненную по одному из вариантов настоящего изобретения, на фиг. 2 — подробное изображение показанной на фиг. 1 схемы изменения глубины модуляции, на фиг. 3 — пример, иллюстрирующий предложенный в настоящем изобретении способ управления, и на фиг. 4 — пример, иллюстрирующий изменение крутящего момента двигателя, управляемого предложенным в настоящем изобретении способом.
Ниже со ссылками на фиг. 1 рассмотрен один из вариантов выполнения настоящего изобретения. Как показано на этом чертеже, постоянный ток (ПТ), пульсации которого сглаживаются выполненным в виде конденсатора фильтром 13, поступает от источника питания 11 ПТ на инвертор 1 с широтно-импульсной модуляцией (ШИМ), являющийся преобразователем электрической мощности.
ШИМ-инвертор 1 преобразует напряжение ПТ в трехфазное напряжение переменного тока, которое подается на асинхронный двигатель 2. Такой асинхронный двигатель 2 можно использовать в качестве тягового двигателя для привода электровоза.
Регулятор 4 тока генерирует сигнал Iq** команды на изменение моментообразующей составляющей тока статора, скорректированный в соответствии с отклонением величины сигнала команды Iq* на изменение тока статора от величины сигнала Iq измеренного тока статора, являющегося выходным сигналом преобразователя 5 координат, и этот сигнал Iq** команды подается на входы схемы 6 выполнения команд на изменение напряжения и схемы 7 выполнения команд на изменение угловой частоты скольжения.
Схема 7 выполнения команд на изменение угловой частоты скольжения вырабатывает сигнал команды на изменение угловой частоты скольжения в соответствии с величинами сигнала Id* команды на изменение намагничивающей составляющей тока и сигнала Iq** команды на изменение моментообразующей составляющей тока статора.
Схема 6 выполнения команд на изменение напряжения вырабатывает необходимые для системы с вращающимся магнитным полем две компоненты напряжения Vd* и Vq*, подаваемого на асинхронный двигатель 2, в соответствии с откорректированной величиной сигнала Iq** команды на изменение моментообразующей составляющей тока статора, и сигналом команды на изменение основной угловой частоты скольжения, о которой будет сказано ниже, и подает эти две компоненты напряжения на преобразователь 8 полярных координат.
Преобразователь 8 полярных координат преобразует векторы напряжения, выраженные величинами Vd* и Vq*, в амплитуду V0 и фазу вектора напряжения.
С другой стороны, скорость асинхронного двигателя, измеряемая датчиком 16 скорости, суммируется на сумматоре 17 с величиной сигнала команды на изменение угловой частоты скольжения, являющегося выходным сигналом схемы 7 выполнения команд на изменение угловой частоты скольжения, и при этом генерируется сигнал команды на изменение основной угловой частоты. Сигнал команды на изменение основной угловой частоты подается на интегратор 18 и в схему 6 исполнения команд на изменение напряжения.
Преобразователь 5 координат, на вход которого поступают измеряемые датчиками 15u, 15v и 15w токов выходные токи iu, iv и iw ШИМ-инвертора 1, преобразует последние в соответствии с сигналом в компоненту Id намагничивающей составляющей тока в системе координат вращающегося магнитного поля и в компоненту Iq моментообразующей составляющей тока статора, которая подается в регулятор 4 тока.
Сумматор 19 суммирует сигнал в стандартной системе координат, поступающий с выхода интегратора 18, с фазой вектора напряжения, которая подается с выхода преобразователя 8 полярных координат, и генерирует выходной сигнал . Схема 10 выполнения команд на изменение скорости модуляции вырабатывает значение глубины Vc модуляции в соответствии с сигналом от датчика 14 напряжения, определяющего величину напряжения VFC питающего преобразователь электрической мощности напряжения ПТ, путем ограничения амплитуды V0 вектора напряжения, являющегося выходным сигналом преобразователя 8 полярных координат, величиной, не превышающей максимально возможное выходное напряжение преобразователя электрической мощности.
Схема 9 генерирует поступающие затем на ШИМ-инвертор 1 импульсные ШИМ-сигналы Su, Sv и Sw типа «включено»/»выключено» в соответствии с величинами сигнала Vc, приходящего на нее с выхода схемы 10 глубины модуляции, и сигнала с выхода сумматора 19.
Ниже работа упомянутых выше устройств рассмотрена более подробно.
Преобразователь 5 координат генерирует, в частности, компоненты Id намагничивающей составляющей тока и Iq моментообразующей составляющей тока статора из сигнала в стандартной системе координат и выходных токов iu, iv и iw инвертора в соответствии со следующей формулой (1).
В этой формуле К1 означает коэффициент пропорциональности, К2 означает коэффициент интегрирования, а s означает оператор Лапласа.
Следующая формула (3) описывает один из примеров работы схемы 6 выполнения команд на изменение напряжения.
В этой формуле r1 означает активное сопротивление первичной обмотки асинхронного двигателя 2, Ls означает индуктивность рассеяния и L1 означает индуктивность первичной обмотки.
Следующая формула (4) описывает один из примеров работы схемы 7 выполнения команд на изменение угловой частоты скольжения.
Работа преобразователя 8 полярных координат описывается формулами (5) и (6).
На фиг. 2 показан один из примеров работы схемы 10 выполнения команд на изменение глубины модуляции. Сигнал V0 от преобразователя 8 полярных координат делится делителем 201 на величину VCF напряжения на фильтрующем конденсаторе и полученный сигнал нормируется умножителем 202 и в виде сигнала Vc’ глубины модуляции подается на ограничитель 203. Ограничитель 203 предназначен для того, чтобы выходной сигнал глубины модуляции (команда на изменение напряжения), полученный в соответствии с входным сигналом Vc’ глубины модуляции (команда на изменение напряжения), не превышал предварительно заданной величины. Работа схемы, показанной на фиг. 2, описывается следующей формулой (7).
В соответствии с этой формулой глубина Vc модуляции нормируется таким образом, чтобы напряжение в моноимпульсном режиме при максимальном выходном напряжении ШИМ-инвертора было равно 1. Функция min ( ) представляет собой функцию, от которой берется минимальное значение, и если результат вычислений превышает 1, то значение Vc ограничивается величиной, равной 1. В соответствии с формулой (7) максимальное значение V0max величины V0 определяется формулой (8).
В показанной на фиг. 1 и работающей, как описано выше, в соответствии с формулами (1)-(7) схеме управления можно осуществить надежное управление двигателем в диапазоне от низких до высоких скоростей при переходе для максимально эффективного использования ПТ ШИМ-инвертора 1 с режима ШИМ на моноимпульсный режим.
Ниже приводится подробное описание работы этой схемы.
Разработка системы векторного управления в среде MexBIOS Development Studio
1 Солодкий Е. М., 1 Терёхин А.А., 1 Юсупов И.Р.
1 ГОУ ВО «Пермский национальный исследовательский политехнический университет», Пермь, Россия (614000, Пермь, Комсомольский пр. 29), e—mail: wsdl00@gmail.com
Рассматривается пример проектирования и разработки датчиковой системы векторного управления с регуляторами скорости и тока для электромеханической системы управления с асинхронным двигателем, который предназначен для лабораторных и практических занятий. Рассмотрена структура векторной системы управления асинхронным двигателем с ориентацией по вектору потокосцепления ротора. Уделяется особое внимание возможности использования учебных стендов на базе современных схемотехнических решений в образовательных целях и объединения программной и аппаратной частей в виде отдельных узловых блоков в среде визуального программирования MexBIOS Development Studio. Наглядность восприятия обеспечивается единообразной структурой векторной системы управления и простотой реализации алгоритмов. В статье предложены способы и модели, позволяющие перед непосредственной реализацией на микропроцессоре проводить отладку проектируемых систем управления.
Ключевые слова: процессор цифровой обработки сигналов, асинхронный двигатель, наблюдатель угла, вычислитель потокосцепления ротора, система визуального программирования.
Учебные стенды и визуальная среда разработки и моделирования MexBIOS позволяет проектировщикам устройств абстрагироваться от программирования микроконтроллеров и сосредоточиться на оптимальной реализации задач управления. MexBIOS позволяет выполнять практически полный цикл проектирования встроенного программного обеспечения микроконтроллеров: от предварительного моделирования разрабатываемой системы и пробных запусков на макетах, и до работ по сопровождению производства, внесению изменений в выпускаемую продукцию. Основная область применения разработанного продукта – системы управления электродвигателями и устройствами автоматизации, однако примененный подход универсален и для других направлений. Учебные стенды могут быть использованы при обучении бакалавров, магистров, на курсах повышения квалификации по электротехническим направлениям и специальностям, в первую очередь «Электротехника, электромеханика, электротехнологии», «Электропривод и автоматика промышленных установок и технологических комплексов» и др., а так же для научных исследований в ходе аспирантской подготовки.
В данной работе рассматривается пример проектирования и реализации датчиковой системы векторного управления с синтезом регуляторов скорости и тока для асинхронного двигателя, который может быть использован в лабораторных и практических занятиях. Работа студентов со стендами и учебными комплектами предполагает изучение современных схемотехнических решений для задач проектирования систем управления асинхронным двигателем (векторное управление и прямое управление моментом). Следующий шаг в обучении это непосредственная реализация алгоритмов управления. Задача построения полноценной векторной системы управления сложна и при использовании языков высокого уровня, таких как С++, предполагает длительный процесс программирования и отладки. На языке визуального проектирования MexBIOS Development Studio схема управления наглядна и проста для понимания. Ознакомившись же с реально работающий системой управления АД, студент получает практическое задания по адаптации регуляторов исходя из параметров схемы замещения АД, которые будут ему выданы. Работа студента предполагает знание основных шаблонов, таких как: координатные преобразования, блок векторного ШИМ, блок оценки потокосцепления ротора, опрос и обработка сигналов с АЦП. Дальнейшая практическая задача, которая ставится перед студентом, непосредственный синтез регуляторов, снятие переходных процессов и оценка качества.
Учебный стенд, представленный в данной работе, имеет в своем составе два комплекта процессорных модулей и агрегат из двух двигателей объеденных валами через муфту с тензометрическим датчиком момента. Двигатели постоянного тока укомплектованы датчиком скорости – энкодером.
Наличие двух спаренных двигателей разного типа позволяет расширить возможности стенда, в плане: обучение программированию встроенных систем, в том числе в среде разработки MexBIOS Development Studio, создание алгоритмов и схем управления двумя типами двигателей на одном стенде, исследование статических и динамических режимов работы, исследование и настройка работы электроприводов под нагрузкой. Интерфейсный модуль стенда может быть снабжен процессорами цифровой обработки сигналов (ПЦОС) TMS320F2812 или TMS320F2335.
MexBIOS Development Studio – визуальная среда разработки и моделирования встроенного программного обеспечения систем управления электродвигателями. Используя блоки из палитры компонентов, собирается программа управления электродвигателем. Блоки представляют собой законченные функции управления электродвигателем.
Основные блоки при реализации векторной системы:
– Clark — Блок координатного преобразования из трехфазной симметричной системы координат в двухфазную симметричную систему координат
– Park — Блок координатного преобразования из двухфазной неподвижной системы координат в двухфазную вращающуюся систему координат
– Svgendq — генератор пространственного вектора ШИМ. Блок предназначен для формирования соответствующей длительности включения ключей инвертора, необходимой для создания формы напряжения статора с помощью ШИМ. Форма напряжения статора представляется в неподвижной двухфазной системе координат
– ADC — Драйвер АЦП, для конфигурирования и опроса АЦП микроконтроллера.
Для того чтобы сократить затраты вычислительной мощности процессора при работе с числами, чип работает с числами без плавающей запятой. В микроконтроллерах арифметические операции проводятся с применением фиксированной запятой. Дробные числа преобразуются в целые числами. При этом под представление дробной и целой части числа выделяется различное количество бит слова контроллера. Чип работает с типами данных такие как: IQ1- IQ24, где число стоящие после IQ – количество бит выделенных для представления дробной части. При работе с моделью двигателя, не записывая программу в память процессора, используются так же форматы integer и float.
Векторная система управления состоит из трех контуров: контур тока, контур скорости, и контур потокосцепления. Частота вызова основных блоков составляет 20кГц. Блок контура тока и контур потокосцепления работают с частотой 10кГц, а контур скорости с частотой 5кГц.
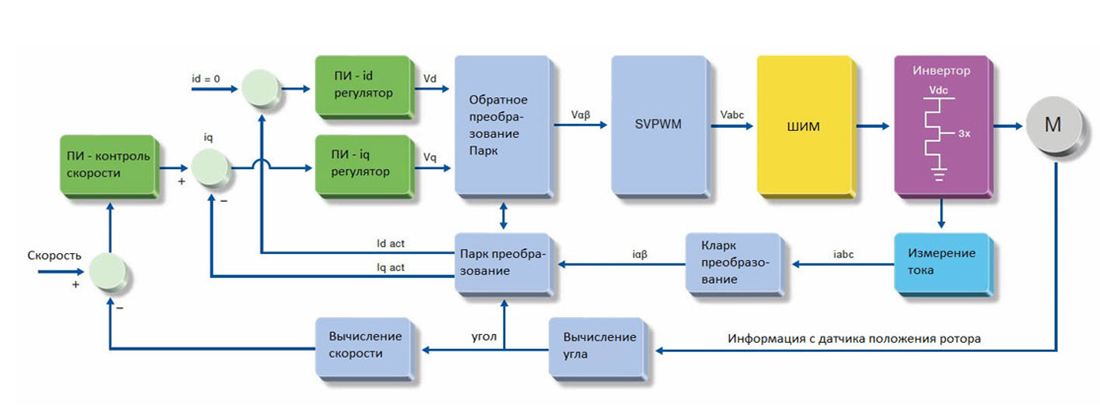
В MexBiose Development Studio была разработана структурная общая для систем векторного управления (Рис. 4). В данной реализации системы векторного управления реализован автоматический расчет регуляторов тока и скорости по параметрам схемы замещения АД (рис. 3).

Рис. 3. Структурную схему векторного управления
Контур тока является внутренним контуром. Для асинхронного двигателя необходимо два регулятора тока для управления двумя составляющими вектора тока. Составляющая Id – формирует магнитный поток асинхронной машины, необходимый для формирования момента. Составляющая Iq – формирует момент асинхронной машины.
Объединив d-q составляющие тока, уравнения равновесия для АД могут быть записаны в векторной форме (1, 2)
 (1)
(1)
 (2)
(2)
Для реализации наблюдателя потокосцепления, с использованием вектора тока  (в проекциях оси координат d-q) и электрической угловой скорость ротора
(в проекциях оси координат d-q) и электрической угловой скорость ротора  в качестве входных сигналов, используем уравнение (1). Выполнив разложение уравнения (1) на реальную и мнимую части и предполагая, что
в качестве входных сигналов, используем уравнение (1). Выполнив разложение уравнения (1) на реальную и мнимую части и предполагая, что  (требуемая ориентация d—q системы координат), уравнение (2) можно записать следующим образом:
(требуемая ориентация d—q системы координат), уравнение (2) можно записать следующим образом:
 (3)
(3)
 (4)
(4)
Переписав уравнение (3) в интегральной форме, выходные оценки наблюдателя потока (амплитуда, скорость и положение вектора потокосцепления  ) можно выразить следующим образом:
) можно выразить следующим образом:
 (5)
(5)
 (6)
(6)
 (7)
(7)
Таким образом, полная оценка вектора потокосцепления может быть получена с помощью форму (5-7). На практике при моделировании подобные оценки показали плохие результаты, поскольку при реализации используются токи, полученные из координатных преобразований с использованием угла, который сам участвует преобразованиях. Таким образом, накапливается ошибка вычисления. В бездатчиковой системе управления это особенно критично.
Предлагается оценку скорости выполнить несколько иначе, используя следующее приближение:
 (9)
(9)
Из формулы (2), раскладывая вектора на плоскость, с учетом приближение (9), имеем:
 (10)
(10)
 (11)
(11)
где  ,
,  ток в осях координат
ток в осях координат  —
—  .
.
В результате практической реализации рассмотренных способов оценки потокосцепления ротора наиболее точные результаты были получены при использовании выражений (5), (10), (7), которые исключают накопление статической ошибки.
В MexBIOS Development Studio был разработан наблюдатель угла потокосцепления ротора по рассмотренной методике, который был успешно проверен на имитационных моделях и стенде.

Рис. 4. Реализация наблюдателя угла в среде MexBIOS
Графики переходного процесса по скорости, токам в осях — , углу и моменту, полученные по результатам имитационного моделирования, приведены на рисунке 5. При снятии характеристик на 0.3 секунде была добавлена статическая нагрузка 10 Н м.


Рис. 5. Графики переходных процессов.
а – скорости, б – токов в осях — , в – угла  , г – момента двигателя.
, г – момента двигателя.
В работе был рассмотрен пример проектирования и реализации датчиковой системы векторного управления с синтезом регуляторов скорости и тока для асинхронного двигателя, который может быть использован в лабораторных и практических занятиях. Разработана структурная схема в среде визуального программирования MexBIOS Development Studio, которая может быть предложена студентам для дальнейшей доработки по вариативному заданию в лабораторных и практических занятиях. С использованием MexBIOS Development Studio достигается наглядность полученных результатов за счет визуальных средств и вывода информации на виртуальные приборы
Список литературы
1. Анучин А. С. Системы управления электроприводов / Учебник для вузов. М.: Изд-во «Издательский дом МЭИ», 2015. – 320с.
2. Костыгов А.М., Зюзев А.М., Солодкий Е.М., Кухарчук А.В., Мудров М.В., Нестеров К.Е. Состояние и перспективы использования аппаратно-программных симуляторов электротехнических комплексов / Электротехника. – 2015. — № 6. – С. 8-12.
3. Даденков Д.А., Солодкий Е.М., Шачков А.М. Моделирование системы векторного управления асинхронным двигателем в пакете Matlab/Simulink // Вестник Пермского национального исследовательского политехнического университета. Электротехника, информационные технологии, системы управления. – 2014. — № 3 (11). – С. 117-128.
4. Калачёв Ю.Н. Наблюдатели состояния в векторном электроприводе. [Электронныйресурс].http://elprivod.nmu.org.ua/files/automaticED/kalachev_yu_n_nablyudateli_. (дата обращения: 10.02.2016).
5. Костыгов А.М., Даденков Д.А., Солодкий Е.М., Шачков А.М. Бездатчиковое векторное управление вентильным двигателем с коррекцией ошибки вычисления электрического угла // Информационно-измерительные и управляющие системы. – 2015. — № 13-9. – С. 27-33.
6. Костыгов А.М., Солодкий Е.М., Даденков Д.А. Синтез регуляторов тока и скорости в системе векторного управления вентильным электроприводом // Фундаментальные исследования. – 2014. — № 11-7. – С. 656-661.
Структурные схемы асинхронного двигателя с короткозамкнутым ротором для частотно-регулируемого электропривода со скалярным и векторным управлением
Полный текст:
- Аннотация
- Об авторах
- Список литературы
- Cited By
Аннотация
Современные системы управления частотно-регулируемых асинхронных электроприводах (ЭП) базируются на представлении трехфазного асинхронного двигателя (АД) двухфазной обобщенной электрической машиной. Это упрощает математическое описание АД и практическую реализацию систем управления частотно-регулируемых асинхронных ЭП, при этом математическое описание АД может проводится в различных системах координат. На практике при исследовании процессов в АД наиболее часто используется математическое описание и их структурные схемы в неподвижной системе координат , жестко связанной со статором и вращающейся синхронно с магнитным полем статора системе координат d, g осью d, ориентированной по вектору потокосцепления ротора , что значительно упрощает исследование их математических моделей. Полученные структурные схемы содержат внутренние обратные связи, в том числе и нелинейные, вытекающие из уравнений проекций напряжений статора. Для компенсации внутренних ЭДС двигателя, наводимых в его статоре, используются обратные связи на входе преобразователей, что позволяет упростить структурные схемы двигателей, а соответственно, и анализ систем управления. Полученные математические модели и структурные схемы АД в неподвижной системе координат , и синхронно вращающейся d, g осью d, ориентированной по вектору потокосцепления ротора , целесообразно использовать в системах частотно-регулируемых асинхронных ЭП, соответственно, со скалярным и векторным управлением. Введение в систему указанных ЭП напряжений обратных связей на входе преобразователя, компенсирующих ЭДС вращения АД, по аналогии с двигателями постоянного тока обеспечивает возможность независимого регулирования их магнитного потока и электромагнитного момента. Полученные математические модели и структурные схемы АД возможно использовать при разработке бездатчиковых систем частотно-регулируемых асинхронных ЭП, где по измеряемым значениям фазных токов и напряжений статора электродвигателя проводится расчет таких параметров двигателя, как потокосцепление, угловая скорость, электромагнитный момент и др.
Ключевые слова
Об авторах
Прищепов Михаил Александрович – доктор технических наук, доцент, профессор кафедры электрооборудования сельскохозяйственных предприятий.
пр. Независимости, 99, 220023, Минск.
Дайнеко Владимир Александрович – кандидат технических наук, доцент, заведующий кафедры электрооборудования сельскохозяйственных предприятий.
пр. Независимости, 99, 220023, Минск.
Прищепова Елена Михайловна – магистр технических наук, старший преподаватель кафедры электрооборудования сельскохозяйственных предприятий.
пр. Независимости, 99, 220023, Минск.
Список литературы
1. Фираго, Б. И. Векторные системы управления электроприводами / Б. И. Фираго, Д. С. Васильев. – Минск : Выш. шк., 2016. – 159 с.
2. Принцип ориентации по полю – основа системы регулирования асинхронных машин // Автоматизированный электропривод, электротехнология и электроснабжение промышленных предприятий. – М., 1972. – С. 1–10. – (Экспресс-информация / Всесоюз. ин-т науч. и техн. информ. ; № 2).
3. Boldea, I. Electric drives / I. Boldea, S. A. Nasar. – Boca Raton : CRC Press, 1999. – 411 p.
4. Vas, P. Sensorless vector control and direct torque control / P. Vas. – Oxford : Oxford Univ. Press 1998. – 729 p.
5. Шрейнер, Р. Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты / Р. Т. Шрейнер. – Екатеринбург : УРО РАН, 2000. – 654 с.
6. Рудаков, В. В. Асинхронные электроприводы с векторным управлением / В. В. Рудаков, И. М. Столяров, В. А. Дартау. – Л. : Энергоатомиздат, 1987. – 134 с.
7. Осипов, О. И. Частотно-регулируемый асинхронный электропривод / О. И. Осипов. – М. : Изд-во МЭИ, 2004. – 80 с.
8. Виноградов, А. Б. Векторное управление электроприводами переменного тока / А. Б. Виноградов. – Иваново : Иванов. гос. энергет. ун-т им. В. И. Ленина, 2008. – 319 с.
9. Фираго, Б. И. Теория электропривода / Б. И. Фираго, Л. Б. Павлячик. – Минск : Техноперспектива, 2004. – 527 с.
10. Мальцева, О. П. Системы управления электроприводов / О. П. Мальцева, Л. С. Удут, Н. В. Кояин. – Томск : Изд-во Том. политехн. ун-та, 2007. – 82 с.
11. Иванов-Смоленский, А. В. Электрические машины / А. В. Иванов-Смоленский. – М. : Энергия, 1980. – 927 с.
12. Фираго, Б. И. Регулируемые электроприводы переменного тока / Б. И. Фираго, Л. Б. Павлячик. – Минск : Техноперспектива, 2006. – 363 с.
13. Удут, Л. С. Проектирование и исследование автоматизированных электроприводов / Л. С. Удут, О. П. Мальцева, Н. В. Кояин. – Томск : Изд-во Том. политехн. ун-та, 2009. – Ч. 8 : Асинхронный частотно-регулируемый электропривод. – 448 с.
14. Ключев, В. И. Теория электропривода / В. И. Ключев. – М. : Энергоатомиздат, 1985. – 560 с.
15. Соколовский, Г. Г. Электроприводы переменного тока с частотным регулированием / Г. Г. Соколовский. – М. : Академия, 2006. – 265 с.
16. Чиликин, М. Г. Теория автоматизированного электропривода / М. Г. Чиликин, В. И. Ключев, А. С. Сандлер. – М. : Энергия, 1979. – 615 с.
17. Поздеев, А. Д. Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных электроприводах / А. Д. Поздеев. – Чебоксары : Изд-во Чуваш. ун-та, 1998. – 172 с.
18. Структурная схема и динамика электропривода с энергосберегающим асинхронным двигателем при произвольной ориентации вращающейся системы координат / В. И. Косматов [и др.] // Электротехн. системы и комплексы. – 2014. – № 1 (22). – С. 50–55.
19. Николаев, А. А. Разработка усовершенствованной структурной схемы асинхронного двигателя в системе координат d-q относительно ротора без привязки к опорному вектору / А. А. Николаев, Ф. Ф. Муталлапова // Электротехника : сетевой электрон. науч. журн. – 2017. – Т. 4, № 2. – С. 3–12. – https://doi.org/10.24892/RIJEE/20170201
20. Мурашкин, С. И. Асинхронный частотный электропривод с векторным управлением / С. И. Мурашкин // Вестн. КрасГАУ. – 2012. – № 9 (72). – С. 189–196.

