Вентильный двигатель в чем отличие
Вентильный двигатель в чем отличие
Ввиду возросших мощностей судовых электроэнергетических систем, а также потребности судов в высокой маневренности, что обуславливается применением энергоемких гребных энергетических установок, рассматриваются основные движительные установки с приводом от двигателей с постоянными магнитами, а также разработки вентильных индукторных двигателей отечественных и зарубежных производителей. Принцип работы двигателей семейства Azipod практически одинаков, однако отличия заключаются в областях применения данного движителя и суммарной выходной мощностью. Проведено сравнение основных конкурирующих между собой производителей винторулевых колонок, таких как Azipod, на который был сделан основной упор, а также колонки производителей Schottel-Werft Josef Becker GmbH Co. KG, Siemens AG Marine Engineering и комплекс Mermaid от Rolls-Royce. Показаны примеры применения винторулевых колонок семейства Azipod VI — новейшего гребного модуля, предназначенного для работы в тяжелых условиях Северного морского пути, на судах российской судовой компании «Совкомфлот». Рассмотрены отечественные разработки синхронных гребных электродвигателей — вентильных двигателей, показано основное их отличие от других типов гребных двигателей. В настоящее время вентильные двигатели выпускаются отечественными предприятиями для угольной и буровой промышленности, однако один из таких типов двигателей установлен на буксир, что является первым успешным проектом такого рода. Следовательно, для систем электродвижения прослеживается тенденция создания винторулевых колонок на базе синхронных двигателей с постоянными магнитами, а при достаточном финансировании российских предприятий есть все предпосылки для разработки отечественных как внутрикорабельных комплексов электродвижения, так и винторулевых колонок на основе вентильно-индукторных двигателей.
Ключевые слова
Аzipod, винторулевая колонка, приводной двигатель, гребная электрическая установка, вентильный двигатель, постоянные магниты
Читать полный текст статьи: PDF
Список литературы
Егоров Л. Е. Компьютерное моделирование единой высоковольтной судовой электроэнергетической системы с пропульсивными комплексами типа Azipod в нормальных и аварийных режимах работы: дис.. канд. техн. наук: 05.09.03 / Л. Е. Егоров. — СПб.: ФГБОУ ВО «ГУМРФ имени адмирала С. О. Макарова», 2014. — 183 с.
ABB [Электронный ресурс]. — Режим доступа: http://new.abb.com/ (дата обращения: 01.04.2018).
Кузнецов В. И. Бестрансформаторные единые электроэнергетические системы: дис.. канд. техн. наук: 05.09.03 / В. И. Кузнецов. — СПб.: СПБГМТУ, 2015. — 159 с.
Библиотека фирмы ABB [Электронный ресурс]. — Режим доступа: https://library.e.abb.com (дата обращения: 05.04.2018).
Никифоров Б. В. Корабельный электропривод / Б. В. Никифоров. — Новочеркасск: Лик, 2014. — 270 c.
Дядик А. Н. Корабельные энергетические системы / А. Н. Дядик, Б. В. Никифоров. — Новочеркасск: Колорит, 2012. — 680 c.
Дарьенков А. Б. Гребные электрические установки / А. Б. Дарьенков, Г. М. Мирясов, В. Г. Титов [и др.]. — Н. Новгород: Изд-во НГТУ им. Р. Е. Алексеева, 2014. — 219 с.
Высоцкий В. Е. Электромеханические процессы в вентильном двигателе с постоянными магнитами / В. Е. Высоцкий, А. П. Синицын, С. А. Тарашев // Вестник Самарского государственного технического университета. Серия: Технические науки. — 2010. — № 2 (27). — С. 139-144.
Птах Г. К. Вентильно-индукторный реактивный электропривод средней и большой мощности: зарубежный и отечественный опыт / Г. К. Птах // Электротехника: сетевой электронный научный журнал. — 2015. — Т. 2. — № 3. — С. 23-33.
Лагода Ф. И. Вентильные двигатели / Ф. И. Лагода // Актуальные вопросы энергетики: материалы Всероссийской науч. конф. студентов, магистрантов, аспирантов. — Омск: Омский государственный технический университет, 2016. — С. 76-80.
Быков А. C. Гребные электрические установки атомных ледоколов / А. C. Быков, В. А. Малышев, В. В. Романовский. — СПб.: Элмор, 2004. — 320 c.
Никифоров Б. В. Перспективы применения вентильных индукторных приводов в составе СЭД ДЭПЛ / Б. В. Никифоров, А. А. Цветков // Интеллектуальные электромеханические системы и комплексы специального назначения. — Новочеркасск: Лик, ЮРГТУ. — С. 11-16.
Emadi A. Energy-Efficient Electric Motors / A. Emadi. — New York: Marcel Dekker, Inc., 2004. — 406 p.
Дядик А. Н. Корабельные энергетические системы / А. Н. Дядик, Б. В. Никифоров. — Новочеркасск: Колорит, 2012. — 680 с.
Никифоров Б. В. Аккумуляторные батареи подводных аппаратов / Б. В. Никифоров, А. И. Русин. — Новочеркасск: Колорит, 2011. — 162 с.
Силовая электроника корабельных электротехнических комплексов: учеб. пособие / под ред. Б. В. Никифорова. — Новочеркасск: Колорит, 2006. — 411 с.
Никифоров Б. В. Вентильно-индукторные двигатели для тяговых электроприводов / Б. В. Никифоров, С. А. Пахомин, Г. К. Птах // Электричество. — 2007. — № 2. — С. 34-38.
Никифоров Б. В. Исследование вентильного индукторного двигателя в составе насосного агрегата / Б. В. Никифоров, А. А. Цветков // Электротехника. — 2007. — № 6. — С. 24а-33.
Никифоров Б. В. Развитие систем электропривода подводных лодок (в порядке обсуждения) / Б. В. Никифоров // Судостроение. — 1999. — № 5. — С. 23-25.
Рroverbs J. Aspects of electro-magnetic aircraft launch and linear machine development / J. Proverbs, Colyer, T. Cox, J. F. Eastham // IEEE transaction on Magnetics. — 2010. — Vol. 46. — Is. 12. — Pp. 57-59.
Petersen L. J. Next-Generation Power and Energy: Maybe Not So Next Generation / L. J. Petersen, D. J. Hoffman, J. P. Borraccini, S. B. Swindler // Naval Engineers Journal. — 2010. — Vol. 122. — Is. 4. — Pp. 59-74. DOI: 10.1111/j.1559-3584.2010.00280.x.
Ehrhart Р. Тhе аll-electric ship: ready to take over? / Р. Ehrhart // Naval Forces. — 2011. — Vol. XXXII. — Pp. 41-45.
Letellier Р. H. Power Permanent Magnet Machines for Electric Propulsion Drives / Р. H. Letellier // Материалы 3 международного симпозиума: All electric ship civil or military (AES 2000). — Париж, 2000. — C. 26-27.
Jamai Н. Optimal Switched Reluctance Моtor Drive for Hydraulic Рumр unit / Н. Jamai, М. Kaneda, K. Ohyama, Y. Takeda, N. Matsai. — IEEE INTECH, 2000. — Pp. 98-101.
Buckingham J. Submarine Рower and Propulsion — Application оf Technology to Deliver Customer Benefit / J. Buckingham, C. Hodge, T. Hardy. — Bath, UK: ВМT Defence Services Ltd., 2008. — 17 p.
Зайцев А. А. Транспорт на магнитном подвесе / А. А. Зайцев, Г. Н. Талашкин, Я. В. Соколова. — СПб.: Изд-во ПГУПС, 2010. — 60 с.
Никифоров Б. В. Применение системы электродвижения на ПЛ / Б. В. Никифоров // Электричество. — 2001. — № 8. — C. 121-123.
Никифоров Б. В. Корабельные системы электродвижения: дис. … д-ра техн. наук / Б. В. Никифоров. — СПб.: ЦКБ Морской техники «РУБИН», 2006. — 311 с.
Григорьев А. В. Единая электроэнергетическая установка гидрографического судна на базе системы электродвижения переменного тока / А. В. Григорьев, К. С. Ляпидов, Л. С. Макаров // Судостроение. — 2006. — № 4. — С. 33-34.
Пат. 2324272 Российская Федерация, МПК H 02 J 9/06. Интеллектуальный преобразователь напряжения постоянного тока для динамически изменяющейся нагрузки / В. Е. Апиков, К. С. Ляпидов, О. Е. Лозицкий, Б. В. Никифоров; заяв. и патентообл. Центральное конструкторское бюро морской техники «РУБИН», ЗАО «ИРИС», ФГУП «Производственно-конструкторское предприятие “ИРИС”». — № 2006120505/09; заявл. 13.06.2006; опубл. 10.05.2008, Бюл. № 13.
Mitcham A. J. Motors and drives for surface ship propulsion: comparison of technologies / A. J. Mitcham, J. J. A. Cullen // Proc. 1995 Electric Propulsion Conf. — 1995. — Vol. 4. — Pp. 88-89.
Letellier Р. Electrical propulsion motors / Р. Letellier // Electric Propulsion. Тhе Effective Solution. — London: IMarE, 1995. — P. 7.
Никифоров Б. В. Создание корабельных систем электродвижения с вентильно-индукторным электроприводом / Б. В. Никифоров, А. П. Темирёв, О. Е. Лозицкий // Известия высших учебных заведений. Электромеханика. — 2007. — № 4. — С. 62-66.
Ericsen Т. Power electronics and future ships electrical system / Т. Ericsen, N. Hingorani, Yu. Khersonsky // IЕЕЕ Transactions оf industry applications. — 2006. — Vol. 42. — Is. 1. — Рр. 76-79.
Ehrhart Р. MM technologies and application at ships generators and motors / Р. Ehrhart, L. Sozzi // Developing Benefits for Maritime Applications. -1998. — P. 2.
Авт. св. № 332499. Асинхронный генератор в ЭЭС / Б. В. Никифоров, В. Н. Давыдов; опубл. 08.01.91.
Пат. 2237338 Российская Федерация, МПК H 02 K 19/06, H 02 K 1/06. Индукторный двигатель / Б. В. Никифоров, В. Н. Давыдов, [и др.]; заяв. и патентообл. ДГУП «Конструкторское бюро приборостроения ФГУП» ПКП «ИРИС». — № 2002119797/09; заявл. 22.07.2002; опубл. 27.09.2004, Бюл. № 27.
Пат. 2343615 Российская Федерация, МПК H02J 9/06. Реверсивный преобразователь напряжения для передачи электроэнергии между сетями переменного и постоянного тока / А. В. Архипов, К. С. Ляпидов, Б. В. Никифоров, [и др.]; заяв. и патентообл. закрытое акционерное общество «ИРИС». — № 2007143397/09; заявл. 22.11.2007; опубл. 10.01.2009, Бюл. № 1.
Klockow B. Electric roads / B. Klockow, H. Biesenack, M. Herzog // Elektrische Bahnen. — 2003. — № 3. — Pp. 107-112.
Cooke R. Integrating eхternal drive actuation systems into the submarine. UDT / R. Cooke. — 2010. — 157 p.
Дядик А. Н. Использование электрохимических генераторов на кораблях / А. Н. Дядик, Б. В. Никифоров. — СПб.: Изд. СПб ГМТУ, 2011. — 340 с.
Об авторах
Романовский Виктор Викторович — доктор технических наук, профессор
ФГБОУ ВО «ГУМРФ имени адмирала С. О. Макарова»
Никифоров Борис Владимирович — доктор технических наук, профессор
ФГБОУ ВО «ГУМРФ имени адмирала С. О. Макарова»
Макаров Арсений Михайлович — аспирант
Бесконтактные постоянного тока вентильные
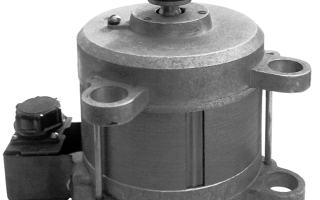
Электродвигатель для стиральных машин ДБ 120-250-10
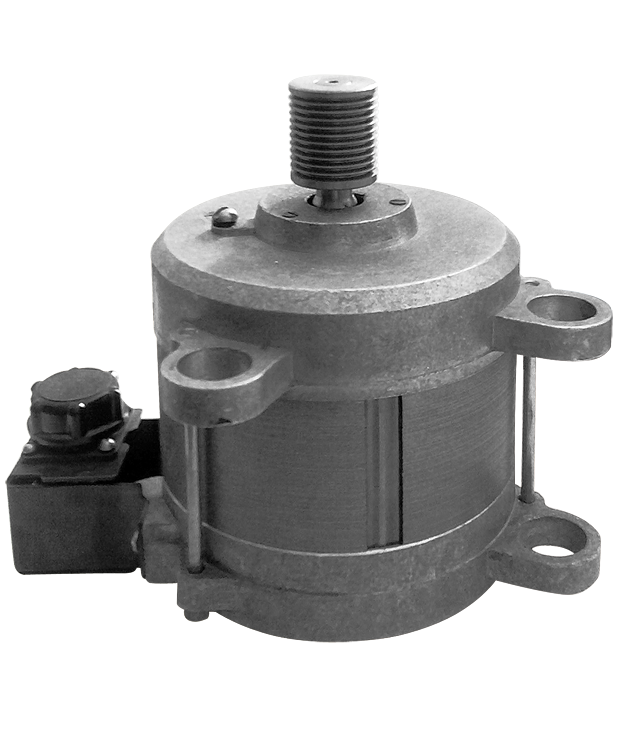
Двигатель бесконтактный управляемый ДБУ 260-120-60
Разработан для использования в качестве привода самоходной инвалидной кресло-коляски.

Электропривод для аппаратов ИВЛ ДБУ 70

Электродвигатель вентильный для аппарата ИВЛ ДБ72-40-1000

Электродвигатель вентильный для аппарата ИВЛ ДБУМ-77
Бесконтактные двигатели постоянного тока вентильные предназначены для использования многими электротехническими приборами. Это обусловлено тем, что устройство обладает универсальными возможностями. Поэтому диапазон использования широкий. Такие виды двигателей оснащены датчиком для положения ротора и полупроводниковым коммуникатором. По этой характеристике его классифицирует как вентильный.
Виды бесконтактных двигателей.
В зависимости от функциональных возможностей, Бесконтактные двигатели постоянного тока вентильные распределены по видах:
-двигатели, которые стабилизируют вращающие частоты;
— со стабилизацией вращающей частоты,
— с управляемой системой;
Отличие бесконтактных двигателей от коллекторных типов тем, что они не обладают щеточными и коллекторными узлами. Эти механизмы могут быть причиной дефектов в работе двигателя и, даже поломки. Поэтому обращения в службу обслуживания такого типа двигателей часты.
Преимущества бесконтактных двигателей постоянного тока.
Главным преимуществом бесконтактного двигателя- это КПД, которое составляет 90 процентов. Еще одним положительным моментом является длительность работы около 40 тысяч часов. Бесперебойная эксплуатация говорит о прочности таких двигателей. Даже в условиях перерыва в работе, запуск таких приборов быстрый.
Длительность эксплуатации бесконтактных электродвигателей предопределена отсутствием в конструкции скользящих электрических контактов.
Отрицательные стороны в эксплуатации бесконтактных электродвигателей.
Несмотря на существенные положительные стороны эксплуатации бесконтактных электродвигателей, есть ряд предостережений, которые отрицательно сказываются на работе двигателей. Сложности возникают при управлении, так как механизм оснащен сложной системой. Еще одним удерживающим фактором является ценовое предложение. Высокая цена предопределена универсальностью и длительностью эксплуатации. Другие виды двигателей (асинхронные и коллекторные) намного дешевле. В отдельных случаях для аналогичных работ можно приобрести дешевый асинхронный двигатель. Отличие состоит в том, что бесконтактные двигатели намного надежны в эксплуатации.
Популярность в эксплуатации бесконтактных двигателей.
В последние годы возрос потребительский спрос на приобретение бесконтактных двигателей для народного хозяйства. Широко применяются эти типы двигателей в быту, ими оснащены инвалидные кресла и больничные кровати для тяжелых больных. Также применяется для работы рельсового транспорта.
Всем желающим можно купить Бесконтактные двигатели постоянного тока вентильные в Омске, Калачинске, Таре, Тюкалинске. В компаниях, продающих эти приборы вы ознакомитесь с подробными техническими характеристиками и возможностями использовать в разных ситуациях: в быту, в помещениях с низким давлением, поблизости взрывоопасных веществ и пожароопасных зон. Мы являемся производителями, поэтому рекомендуем эти двигатели для любого вида электротехнических работ. Уверяем Вас в безупречной эксплуатации наших двигателей. При малейшем дефекте в работе гарантируем обслуживание и замену комплектующих.
- О заводе
- Дипломы и награды
- Новости
- Вакансии
- Фотогалерея
- Контакты
- Измельчители кормов
- Комплектующие
- Электродвигатели
- Асинхронные
- Коллекторные однофазные
- Коллекторные постоянного тока
- Бесконтактные постоянного тока вентильные
- Постоянного тока управляемые с дисковым якорем
- Реле электромагнитные
- 29.37.08.800-02
- Для стартера 29.37.08.800-01
- 391.3708.800 для стартера ваз 2111 — производство
- Для стартера ВАЗ 2110 — 57.3708.800
- 422.3708.800
- 426.3708.800
- Для стартера ГАЗ, УАЗ, ВАЗ 4216.3708.800-07
- Для стартеров ВАЗ 1111 63.3708.800
- Воздуховсасывающие агрегаты
- Для пылесосов ВВА-1200
- Для бытовых пылесосов АВ-600, АВ-1000
- Маслозакачивающие насосы
- МЗН-5 ЕЖАИ.063384
- МЗН-4 ЕЖАИ.063384
- МЗН-3 ЕЖАИ.063384
- МЗН 2 ЕЖАИ.063384.004 ТУ
- МЗН-2 ТУ 23.108-199-92
© АО «МиассЭлектроАппарат», 2011-2018
456306, Челябинская область, г. Миасс, ул. Готвальда, д. 1/1
Сервопривод
Принцип работы
Вентильные электродвигатели
Вентильные двигатели – это синхронные бесколлекторные (бесщёточные) машины. На роторе находятся постоянные магниты из редкоземельных металлов, на статоре — якорная обмотка. Коммутация обмоток статора осуществляется полупроводниковыми силовыми ключами (транзисторами) так, чтобы вектор магнитного поля статора был всегда перпендикулярен вектору магнитного поля ротора — для этого используется датчик положения ротора (датчик Холла или энкодер). Фазный ток регулируется с помощью ШИМ-модуляции и может иметь трапецеидальную или синусоидальную форму.
Линейные серводвигатели
Плоский ротор линейного двигателя сделан из редкоземельных постоянных магнитов. По принципу действия он похож на вентильный двигатель.
Шаговые электродвигатели
В отличие от синхронных машин непрерывного вращения шаговые двигатели имеют на статоре явно выраженные полюса, на которых расположены катушки обмоток управления – их коммутация выполняется внешним приводом.
Рассмотрим принцип работы реактивного шагового двигателя, у которого на полюсах статора расположены зубцы, а ротор выполнен из магнитомягкой стали и тоже имеет зубцы. Зубцы на статоре расположены так, что на одном шаге магнитное сопротивление меньше по продольной оси двигателя, а на другом – по поперечной. Если дискретно возбуждать в определённой последовательности обмотки статора постоянным током, то ротор при каждой коммутации будет поворачиваться на один шаг, равный шагу зубцов на роторе.
Сервопривод
Некоторые модели преобразователей частоты могут работать как со стандартными асинхронными двигателями, так и с серводвигателями. То есть основное отличие сервоприводов не в силовой части, а в алгоритме управления и скорости вычислений. Поскольку в программе используется информация о положении ротора, то у сервопривода есть интерфейс для подключения энкодера, установленного на валу двигателя.
Сервоконтроллер
В сервосистемах используется принцип подчинённого управления: контур тока подчинён контуру скорости, который в свою очередь подчинён контуру положения (см. теорию автоматического управления). Сначала настраивается самый внутренний контур – контур тока, потом – контур скорости и самым последним настраивается контур положения.
Контур тока всегда реализован в сервоприводе.
Контур скорости (как и датчик скорости) также всегда присутствует в сервосистеме, он может быть реализован как на базе встроенного в привод сервоконтроллера, так и внешнего.
Контур положения используется для точного позиционирования (например, осей подач в станках с ЧПУ). Если в кинематических связях между исполнительным органом (координатным столом) и валом двигателя нет люфтов, то координата косвенно пересчитывается по значению кругового датчика. Если люфты есть, то на исполнительный орган устанавливается дополнительный датчик положения (который подключается к сервоконтроллеру) для прямого измерения координаты. Те есть, в зависимости от конфигурации контуров скорости и положения подбирается соответствующий сервоконтроллер и сервопривод (не в любом сервоконтроллере можно реализовать контур положения!).
Как выбрать сервопривод
Основные функции сервосистем
- Позиционирование (Positioning)
- Интерполяция (Interpolation)
- Синхронизация, электронный редуктор (Gear)
- Точное поддержание скорости вращения (шпиндель станка)
- Электронный кулачок (Cam)
- Программируемый логический контроллер.
Компоненты сервосистемы
В общем случае сервосистема (Motion Control System) может состоять из следующих устройств:
- Серводвигатель (Servo Motor) с круговым датчиком обратной связи по скорости (он же может выполнять функцию датчика положения ротора)
- Серворедуктор (Servo Gear)
- Датчик положения исполнительного механизма (например, линейный датчик координаты оси подач)
- Сервопривод (Servo Drive)
- Сервоконтроллер (Motion Controller)
- Операторский интерфейс (HMI).
Варианты аппаратно-программной реализации сервосистемы
- Сервосистема на базе ПЛК (PLC-based Motion Control)
- Функциональный модуль управления перемещением добавляется в корзину расширения ПЛК
- Автономный сервоконтроллер
- Сервосистема на базе ПК (PC-based Motion Control)
- Специальный софт Motion Control для планшетного ПК с пользовательским интерфейсом (HMI)
- Programmable Automation controller (PAC) с функцией управления перемещением
- Сервосистема на базе привода (Drive-based Motion Control)
- Преобразователь частоты со встроенным сервоконтроллером
- Опциональное программное обеспечение, которое загружается в привод и дополняет его функциями управления движением
- Опциональные платы с функциями управления движением, которые встраиваются в привод.
Типы серводвигателей
- Синхронные
Компактные бесщёточные серводвигатели с возбуждением от постоянных магнитов (вентильные), обеспечивающие высокую динамику и точность.
Асинхронные
Приводы главного движения и шпинделей инструментальных станков.
Прямой привод (Direct Drive)
Прямой привод не содержит промежуточных передаточных механизмов (шарико-винтовых пар, ремней, редукторов):
- Линейные двигатели (Linear Motors) могут поставляться вместе с профильными рельсовыми направляющими
- Моментные двигатели (Torque Motors) — синхронные многополюсные машины с возбуждением от постоянных магнитов, с жидкостным охлаждением, ротор с полым валом. Обеспечивают высокую точность и мощность на низких оборотах.
Преимущества серводвигателей
- Высокое быстродействие, динамика и точность позиционирования
- Высокомоментные
- Малоинерционные
- Большая перегрузочная способность по моменту
- Широкий диапазон регулирования
- Бесщёточные.
Преимущества линейных приводов
Отсутствие кинематических цепей для преобразования вращательного движения в линейное:
- Меньше инерционность
- Нет зазоров
- Меньше температурные и упругие деформации
- Меньше износ и снижение точности при эксплуатации
- Меньше потери на трение – выше КПД.
Точность
Микронная точность требуется в металлообрабатывающих станках с ЧПУ, а в штабелёрах достаточно и сантиметра. От точности зависит выбор серводвигателя и сервопривода.
- Точность позиционирования
- Точность поддержания скорости
- Точность поддержания момента.
Delta Electronics:
Преобразователи Частоты
Промышленная Автоматизация

дисковый вентильный синхронный двигатель с возбуждением от постоянных магнитов
Дисковые синхронные вентильные двигатели

ДСД разрабатывались уже в СССР, в частности в одной из лабораторий ВНИИЭЛЕКТРОМАШ (г. Санкт-Петербург). Работа ЛСМ является развитием этих работ на современном уровне техники и технологии.
 Под дисковым синхронным вентильным двигателем понимают систему регулируемого электропривода, состоящую из дискового электродвигателя переменного тока, конструктивно подобного синхронной машине с возбуждением от постоянных магнитов, и устройства управления, обеспечивающих коммутацию цепей обмоток электродвигателя в зависимости от положения ротора двигателя. В этом смысле вентильный двигатель подобен двигателю постоянного тока, в котором посредством коллекторного коммутатора подключается тот виток обмотки якоря, который находится под полюсами возбуждения. Такого рода двигатели не только регулируются по скорости, но способны преобразовывать параметры электрического сигнала в параметры вращения вала. В отечественной электротехнике традиционно такие двигатели назывались исполнительными, а за рубежом — серводвигателями.
Под дисковым синхронным вентильным двигателем понимают систему регулируемого электропривода, состоящую из дискового электродвигателя переменного тока, конструктивно подобного синхронной машине с возбуждением от постоянных магнитов, и устройства управления, обеспечивающих коммутацию цепей обмоток электродвигателя в зависимости от положения ротора двигателя. В этом смысле вентильный двигатель подобен двигателю постоянного тока, в котором посредством коллекторного коммутатора подключается тот виток обмотки якоря, который находится под полюсами возбуждения. Такого рода двигатели не только регулируются по скорости, но способны преобразовывать параметры электрического сигнала в параметры вращения вала. В отечественной электротехнике традиционно такие двигатели назывались исполнительными, а за рубежом — серводвигателями.
У ДСД, наряду с преимуществами против асинхронного двигателя, есть существенные преимущества в сравнении с двигателями постоянного тока:
- высокая надежность по причине отсутствия коллекторного аппарата;
- достаточно высокие напряжения на статоре и, следовательно, мощности ДСД позволяют применять их в высокоскоростных приводах большой мощности;
- допустимые высокие темпы изменения тока статора существенны в применениях в высокодинамичных электроприводах.
Технологические процессы разнообразны по своему содержанию и областям использования. Еще более разнообразны производственные машины и механизмы, осуществляющие различные технологические процессы. Благодаря своим хорошим регулировочным качествам ДСД получили широкое применение для привода различных промышленных машин и механизмов.
Дисковая конфигурация наиболее эффективна для высокомоментных электромашин.
 Размер — это еще одно важное достоинство: в отличие от традиционных цилиндрических машин, ДСД как правило больше в диаметре, но значительно короче. Его компактная, блинообразная форма позволяет размещать его в устройствах меньшего габарита. Заказчик имеет возможность изменять по специальному заказу внешнюю геометрию, посадочные и присоединительные размеры двигателя.
Размер — это еще одно важное достоинство: в отличие от традиционных цилиндрических машин, ДСД как правило больше в диаметре, но значительно короче. Его компактная, блинообразная форма позволяет размещать его в устройствах меньшего габарита. Заказчик имеет возможность изменять по специальному заказу внешнюю геометрию, посадочные и присоединительные размеры двигателя.- двигатели с полым ротором ( например, серия сервоприводов с полым ротором для станочных применений, предназначенных для работы в паре с ШВП (шариковинтовыми парами);
- двигатели с встроенным дисковым редуктором;
- двигатели-лебедки;
- мотор — колесо, в том числе с режимом торможения;
- бескорпусные встраиваемые в механизм двигатели;
- возможность пакетирования дисковых модулей для наращивания общего момента (при спец. требованиях к размерам).
 Слева естественные механические характеристики традиционных двигателей:
Слева естественные механические характеристики традиционных двигателей:
- Постоянного тока независимого возбуждения.
- Постоянного тока последовательного возбуждения.
- Асинхронного.
- Синхронного.
Ниже приведены сравнительные характеристики традиционных управляемых двигателей с ДСД.
| ХАРАКТЕРИСТИКИ | двигатель постоянного тока | Асинхронный двигатель, управляемый от преобразователя частоты (разомкнутый контур U/f) | Асинхронный двигатель, управляемый от преобразователя частоты (замкнутый контур U/f) | ДСД |
| Диапозон регулирования | 100 — 300 :1 | 10 — 20 : 1 | 100 : 1 | 300 — 10000 : 1 |
| Перегрузка М / Мн (%) | 150 … 200 | 150 | до 300 | 400 — 600 |
| t разг (%) при замкнутом контуре управления (ДСД=100%) | 500 | 450 … 500 | 300 … 400 | 100 |
| Принудительно охлаждение для широкого диапозона регулирования | да | да | да | нет |
| Статический момент (на нулевой скорости) | нет | нет | нет | да |
| Обслуживание двигателя | большое | небольшое | небольшое | небольшое |
| Аварийный останов с помощью механич. тормоза двигателя | хорошо | хорошо | хорошо | хорошо* |
| 4-х квадратный режим | с возвратом энергии в сеть (рекуперативное торможение) | с тормозным резистором | с тормозным резистором | с возвратом энергии в сеть или тормозным резистором |
| Возможность позиционирования и точность повторения | зависит от генератора и внешних устройств | нет | точность позиционирования приблизительно +/-50 угловых минут | точность позиционирования — секунды |
*ДСД сам по себе является качественным тормозом, поэтому механический тормоз применяется только как аварийным и стояночным тормозом.
 На этом рисунке показаны механические характеристики типовых рабочих машин. Характеристика 1 соответствует машинам с рабочим органом резания; если толщина снимаемого резцом слоя постоянна, то момент сопротивления такой машины не зависит от скорости. Характеристика 2 отвечает условиям работы машин, где момент сопротивления определяется, главным образом, силами трения (транспортеры, конвейеры и др. машины). В этом случае момент сопротивления также не зависит от скорости механизма, однако, при пуске механизма момент, создаваемый силами трения покоя может существенно превышать момент сил трения при движении.
На этом рисунке показаны механические характеристики типовых рабочих машин. Характеристика 1 соответствует машинам с рабочим органом резания; если толщина снимаемого резцом слоя постоянна, то момент сопротивления такой машины не зависит от скорости. Характеристика 2 отвечает условиям работы машин, где момент сопротивления определяется, главным образом, силами трения (транспортеры, конвейеры и др. машины). В этом случае момент сопротивления также не зависит от скорости механизма, однако, при пуске механизма момент, создаваемый силами трения покоя может существенно превышать момент сил трения при движении.
Характеристика 3 относится к грузоподъемным механизмам, где момент сопротивления движению создается, главным образом, силой тяжести. Особенностью данной характеристики является то, что момент при подъеме груза несколько превышает момент сопротивления при спуске груза (характеристика 3), что связано с учетом механических потерь в передачах.
Для турбомеханизмов (центробежных и осевых насосов, вентиляторов и компрессоров) момент на валу механизма существенно зависит от скорости — характеристика 4. Для вентиляторов эта зависимость носит квадратичный характер  .
.
Характеристикой, близкой к гиперболе  , обладают намоточные устройства и другие машины, для которых технологически необходима работа с постоянством мощности.
, обладают намоточные устройства и другие машины, для которых технологически необходима работа с постоянством мощности.
Отметим, что моменты на валу рабочей машины, определяемые ее механической характеристикой, не учитывают динамической составляющей момента, которая возникает при изменении скорости двигателя  .
.
Установившийся режим работы характеризуется тем, что скорость двигателя и рабочей машины остается в процессе работы постоянной. При этом момент, развиваемый двигателем, и момент сопротивления движению также постоянны.
Анализ механических характеристик двигателей и типовых рабочих механизмов показывает, что только ДСД, механическая характеристика которого может моделироваться системой управления, может обеспечить установившийся режим работы для любого механизма.
ДСД наиболее успешен в современных применениях, включая прецизионную обработку, промышленную робототехнику, поворотные станы, центрифуги, конвейерные системы, упаковочные системы, и миксеры. В упаковочной промышленности безредукторный двигатель позволяет эксплуатировать линии дольше, при этом требуя меньше обслуживания и меньше ремонта. Конвейерные системы имеющие дело с варьирующимся весом выиграют от применения ДСД благодаря его пиковому моменту, который не даст им остановиться под весом, превышающим номинальную нагрузку.
ЛСМ СЗЭМО в настоящий момент проектирует и изготавливает двигатели с преимуществами:
- компактный монтаж, благодаря очень большой удельной мощности;
- высокая динамика, благодаря малому моменту инерции и низкой индуктивности обмоток;
- улучшенный теплоотвод;
- универсальное использование для большого числа приложений, встраиваемость в механизм;
- широкий спектр двигателей.
С областью применения:
- автоматические сборочные линии;
- роботы и манипуляторы;
- конвейеры;
- металлорежущие станки;
- обработка дерева, стекла, керамики;
- печатные машины;
- координатные машины;
- упаковочные станки, станки для обработки пластмасс;
- механизмы для намотки и размотки материала.
С техническими параметрами.
| Тип двигателя | дисковый синхронный двигатель с возбуждением постоянными магнитами |
| Материал магнита | редкоземельный магнит |
| Изоляция обмотки статора по EN 60034-1 (IEC 60034-1) | класс нагревостойкости F для перегрева обмотки в Δ T |
| Исполнение по EN 60034-7 (IEC 60034-7) | IMB5 (IMV1, IMV3) |
| Класс защиты по EN 60034-5 (IEC 60034-5) | IP 54 |
| Охлаждение | Самоохлаждение |
| Контроль температуры | Датчик температуры в обмотке статора |
| Конец вала на стороне A по DIN 748-3 (IEC 60072-1) | Со шпонкой и пазом |
| Точность вращения, соосность и равномерность вращения по DIN42955 (IEC 60072-1) | Допуск N (обычный) |
| Вибрация по EN 60034-14 (IEC 60034-14) | Уровень N (обычный) |
| Уровень шума, макс. по EN 21680 | 65-70db (A) |
| Опции | датчики инкрементальные TTL (RS422), sin/cos 1 Vpp, 100-10000 об/мин |
| класс нагревостойкости H для перегрева обмотки + 140 ° C | |
| напряжение двигателя 12-500 В | |
| расширенный режим эксплуатации -50 ° С — +50 ° С | |
| встроенное охлаждение | |
| полый вал | |
| безвальная конструкция | |
| класс защиты IR65, IR68 | |
| стояночный тормоз | |
| планетарный или цевочный редуктор |
Телефон : , E-mail: info@matrixgroup.su, Время работы: с 9.00 до 18.00 (без обеда).
© Matrix Group, LLC — Поставка продукции Delta Electronics, Inc — преобразователи частоты, средства автоматизации, ремонт, модернизация станков с ЧПУ, 2004-2021