Несколько способов управления однофазным асинхронным двигателем
Несколько способов управления однофазным асинхронным двигателем
 Достоинства и недостатки различных способов управления асинхронными двигателями. Выводы, сделанные по опыту практического применения.
Достоинства и недостатки различных способов управления асинхронными двигателями. Выводы, сделанные по опыту практического применения.
В настоящее время получили большое распространение асинхронные электродвигатели с короткозамкнутым ротором. Это вызвано тем, что такие машины не имеют щеточного узла, их ротор сделан из алюминия и технологически очень прост, а значит, сама конструкция получается очень надежной. Рассмотрим несколько способов управления однофазным асинхронным электродвигателем.
Конденсаторный однофазный электродвигатель
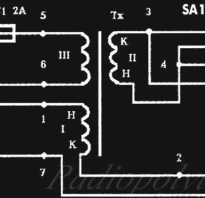
Наиболее распространенным типом асинхронного однофазного электродвигателя является двигатель с двумя статорными обмотками. Первая и вторая обмотки идентичны по количеству витков, но последовательно с одной из обмоток включают конденсатор. Конденсатор обеспечивает сдвиг фаз между обмотками для образования вращающегося магнитного поля для ротора.
Частотный способ управления
Основным способом управления таким двигателем, применяемым в настоящее время, является частотный способ. Этот способ реализуется с помощью специальных приборов, называемых ШИМ инверторами. Эти инверторы, в свою очередь, бывают однофазными и трехфазными, что определяется количеством пар силовых выходов для управления обмотками двигателя. Для управления однофазным двигателем может быть применен как однофазный, так и трехфазный инвертор. Пример самодельной конструкции — частотный преобразователь своими руками.
Управление однофазным ШИМ инвертором
При таком управлении обе обмотки двигателя включены параллельно. Два выхода инвертора подключаются к точкам соединения обмоток. Инвертор формирует напряжение с варируемой частотой и с линейной зависимостью напряжение к частоте. Регулировать частоту можно как вниз, так и вверх. Диапазон регулировки обычно не превышает 1:10, т.к. емкость конденсатора в одной из обмоток напрямую зависит от частоты.
Достоинства
Основные достоинства этого метода – это простота ввода в эксплуатацию, не требующая переделки конструкции двигателя; надежная работа, т.к. частотный преобразователь специально разработан для управления такими типами двигателей; хорошие характеристики (ПИД-регулятор, предустановленные скорости, низкий пусковой ток, защитные функции и т.д.)
Недостатки
К недостаткам относятся: только однонаправленное вращение; более высокая стоимость и дефицит однофазных преобразователей по сравнению с трехфазными, по причине их малого выпуска.
Управление трехфазным ШИМ инвертором
В данном случае обмотки двигателя включают последовательно. Выходы трехфазного преобразователя подключают к средней точке и к концам обмоток электродвигателя. Конденсатор при этом из схемы исключают (требуется некоторая переделка двигателя) Так как обмотки двигателя сдвинуты на 90 градусов, а инвертор дает сдвиг фаз на 120 градусов, то поле не будет идеально круговым и это отрицательно скажется на параметрах регулирования.
Поле будет пульсирующим. Так как порядок коммутации выводов инвертора можно менять программным путем, то легко добиться изменения чередования напряжений на обмотках, следовательно, менять направление вращения ротора двигателя.
Достоинства
К достоинствам следует отнести: доступность на рынке и сравнительно низкую цену; возможность реверсивной работы обычного нереверсивного двигателя; более широкий, чем у однофазного преобразователя диапазон регулировки; возможности программируемых функций как у однофазного инвертора или даже шире за счет большего количества коммутируемых выходов.
Недостатки
Недостатки это: пониженный и пульсирующий момент однофазного двигателя; повышенный его нагрев; не все стандартные преобразователи готовы для такой работы, т.к. некоторые производители прямо запрещают использовать свои изделия в таком режиме.
Фазовое управление с помощью симисторного регулятора (диммера)
Этот метод самый «древний», он обусловлен отсутствием до недавнего времени в широкой продаже частотных регуляторов и их относительно высокой ценой. При таком управлении обмотки двигателя остаются включенными параллельно. Одна из обмоток включена последовательно с фазосдвигающим конденсатором. К точкам параллельного соединения обмоток подключается симисторный регулятор.
На выходе этого регулятора формируется однофазное напряжение с постоянной частотой (50 Гц) и регулируемым среднеквадратическим значением. Это происходит за счет регулирования напряжения открывания симистора, т.е. изменяется время открытого состояния симистора за период следования сетевого напряжения.
Момент на валу двигателя, при таком регулировании, будет снижаться пропорционально напряжению, критическое скольжение будет неизменным.
Достоинства
Основные достоинства: исключительная простота устройства управления; возможность собрать и починить такое устройство любым радиолюбителем; на порядок или даже несколько порядков более низкая цена по сравнению с частотными приводами.
Недостатки
Основные недостатки это: регулирование оборотов только на понижение; диапазон регулирования с помощью диммера только 2:1; стабильность скорости только удовлетворительная; допустимая нагрузка резко снижается с уменьшением скорости; перегрев двигателя на низких скоростях, т.к. не хватает производительности встроенного вентилятора двигателя; необходимость завышения мощности двигателя.
Выводы
Исходя из всего вышеперечисленного, необходимо настоятельно рекомендовать применение частотных приводов для управления асинхронными двигателями. Такие приводы (ШИМ инверторы) кроме несомненных удобств по управлению, позволяют получить высокий КПД установок и добиться роста коэффициента мощности (cos фи) до 0.98, т.е. реализовать программу энергосбережения.
Работа асинхронного двигателя под нагрузкой
§ 92. РАБОТА АСИНХРОННОГО ДВИГАТЕЛЯ ПОД НАГРУЗКОЙ
В рабочем режиме ротор двигателя вращается с числом оборотов в минуту n2, меньшим числа оборотов n1 магнитного поля статора, вращающегося в том же направлении, что и ротор. Поэтому магнитное поле, имеющее большую скорость, скользит относительно ротора с числом оборотов, равным разности чисел оборотов поля и ротора, т. е.

Относительное отставание ротора от вращающегося магнитного поля статора характеризуется скольжением S.
Скольжение представляет собой отношение числа оборотов магнитного поля статора относительно вращающегося ротора к числу оборотов поля статора в пространстве, т. е.

Эта формула определяет скольжение в относительных единицах. Скольжение может быть также выражено в процентах:

Если ротор неподвижен (n2=0), то скольжение равно единице или 100%.
Если ротор вращается синхронно с магнитным полем, т. е. с одинаковой скоростью (n2=n1), то скольжение равно нулю.
Таким образом, чем больше скорость вращения ротора, тем меньше скольжение.
В рабочем режиме асинхронного двигателя скольжение мало. У современных асинхронных двигателей скольжение при полной нагрузке составляет 3—5%, т. е. ротор вращается с числом оборотов, незначительно отличающимся от числа оборотов магнитного поля статора.
При холостом ходе, т. е. при отсутствии нагрузки на валу, скольжение ничтожно мало и может быть принято равным нулю.
Скорость вращения ротора можно определить из следующих соотношений:

Двигатель будет работать устойчиво с постоянной скоростью вращения ротора при равновесии моментов, т. е. если вращающий момент двигателя Мвр будет равен тормозному моменту на валу двигателя Мтор, который развивает приемник механической энергии, например, резец токарного станка. Следовательно, можно записать:

Любой нагрузке машины соответствует определенное число оборотов ротора т2 и определенное скольжение S.
Магнитное поле статора вращается относительно ротора с числом оборотов n8 и индуктирует в его обмотке э. д. с. Е2, под действием которой по замкнутой обмотке ротора протекает ток силой I2.
Если нагрузка на валу машины увеличилась, т. е. возрос тормозной момент, то равновесие моментов будет нарушено, так как тормозной момент окажется больше вращающего. Это приведет к уменьшению скорости вращения ротора, а следовательно, к увеличению скольжения. С увеличением скольжения магнитное поле статора будет пересекать проводники обмотки ротора чаще, э. д. с. E2, индуктированная в обмотке ротора возрастет, а в силу этого увеличится как сила тока в роторе, так и развиваемый двигателем вращающий момент. Увеличение скольжения и силы тока в ротор; будет происходить до значений, при которых вновь наступит равновесие моментов, т. е. вращающий момент станет равным тормозному.
Так же протекает процесс изменения числа оборотов ротора и развиваемого момента при уменьшении нагрузки двигателя, С уменьшением нагрузки на валу двигателя тормозной момент становится меньше вращающего, что приводит к увеличению скорости вращения ротора или к уменьшению скольжения. В результате уменьшаются э.д. с. и сила тока в обмотке ротора, а следовательно, и вращающий момент, который вновь становится равным тормозному моменту.
Магнитное поле статора пересекает проводники обмотки статора и индуктирует в ней э.д. с. Е1 которая уравновешивает приложенное напряжение сети U1.
Если пренебречь падением напряжения в сопротивлении обмотки статора, которое мало по сравнению с э.д.с, то между абсолютными значениями приложенного напряжения и э. д. с. обмотки статора можно допустить приближенное равенство, т. е.

Таким образом, при неизменном напряжении сети будет неизменна и э.д.с. обмотки статора. Следовательно, магнитный поток в воздушном зазоре машины, так же как в трансформаторе, при любом изменении нагрузки остается постоянным.
Ток обмотки ротора создает свое магнитное поле, которое направлено навстречу магнитному полю, образуемому током обмотки статора. Чтобы результирующий магнитный поток в машине оставался неизмененным при любом изменении нагрузки двигателя, размагничивающее магнитное поле обмотки ротора должно быть уравновешено магнитным полем обмотки статора. Поэтому при увеличении силы тока в обмотке ротора увеличивается и сила тока в обмотке статора.
Таким образом, работа асинхронного двигателя принципиально подобна работе трансформатора, у которого при увеличении тока во вторичной обмотке увеличивается ток в первичной обмотке.
Статьи
Тематика: Полезная информация

Преобразователь частоты для электродвигателя
- Введение
- Принцип частотного регулирования
- Устройство преобразователя частоты
- Применение частотных преобразователей
Введение
Существует немало технологических операций, нуждающихся в регулировании угловых скоростей приводных валов механизмов. Традиционно эта задача решалась двумя путями:
- применением механических многоскоростных редукторов для ступенчатого регулирования скорости, либо вариаторов для плавного регулирования;
- использованием электродвигателей постоянного тока совместно с регуляторами уровня питающего напряжения.
Регулирование угловой скорости ротора, основанное на изменении передаточного числа механической трансмиссии, характеризуется снижением общего КПД передачи. Это объясняется высоким уровнем механических потерь в редукторе, подверженном к тому же, интенсивному износу.
Двигатели постоянного тока представляют собой достаточно сложные и дорогие машины. Наличие коллекторного механизма со щёточным аппаратом, предъявляет повышенные требования к их обслуживанию и снижает надёжность.
Компания Овердрайв-Электро предлагает частотно-регулируемые приводы ABB со склада в Минске:
Принцип частотного регулирования
В основе частотного регулирования двигателя переменного тока лежит взаимосвязь угловой скорости, с которой вращается поле статора с частотой напряжения питания. Это означает, что изменение частотной характеристики напряжения статора приводит к пропорциональному изменению угловой скорости вращающегося ротора. Угловая скорость, или частота вращающегося поля статора асинхронного электрического двигателя выражается следующим соотношением:
где f1 — значение частоты напряжения, питающего обмотку статора, р — количество полюсных пар статорной обмотки.
Из приведенной формулы следует, что совершая изменение значения частоты подводимого к двигателю напряжения, можно плавно изменять значение угловой скорости (частоты) вращающегося поля статора, что приведёт к изменению частоты вращения ротора электродвигателя.
Данный принцип позволяет использовать в регулируемых приводах наиболее технологичные, простые и надёжные асинхронные двигатели, имеющие короткозамкнутый ротор. Благодаря высоким технико-экономическим показателям систем частотного регулирования происходит их активное внедрение в сферу промышленной и бытовой техники.
Устройство преобразователя частоты.
На рисунке 1 показана структурная схема, иллюстрирующая устройство преобразователя частоты (ПЧ).

Рис.1 Преобразователь частоты
Сетевое питающее напряжение промышленной частоты 50 герц поступает на вход выпрямителя (В), представляющего собой обычную мостовую диодную сборку. На выходе выпрямителя установлен Г — образный LC фильтр, выполняющий функции сглаживания пульсаций, которые присутствуют в выпрямленном напряжении.
Основной частью преобразователя является инвертор (И), осуществляющий преобразование постоянного напряжения в трёхфазную систему напряжений синусоидальной формы с регулируемой частотой и амплитудой. Ключевыми элементами инвертора служат мощные IGBT транзисторы, которые коммутируются сигналами, генерируемыми в системе импульсно — фазового управления. Система управления транзисторами, формирующими выходное напряжение, которое поступает на статор асинхронного двигателя (АД), основана на принципе ШИМ — широтно-импульсной модуляции. Сигнал управления представляет собой чередование импульсов напряжения с изменяемой скважностью.
Примечание. Скважность — это оценочная характеристика периодического импульсного сигнала, рассчитываемая как отношение периода чередования сигнала к длительности импульса. То есть, величина скважности показывает, какую часть периода занимают импульсы. При изменении скважности изменяется соотношение длительностей импульсов и промежутков между ними.
Следует обратить внимание на одну интересную особенность частотных преобразователей. На рисунке 1 показан преобразователь, подключенный к трёхфазной сети. Существуют модели преобразователей, питающихся от однофазной сети, при этом, на выходе инвертора формируется всё та же трёхфазная система. Разница между трёхфазными и однофазными частотными преобразователями заключается только в качестве напряжения на выходе выпрямителя. Трёхфазный выпрямительный мост создаёт меньший уровень пульсаций напряжения, по этой причине, однофазное выпрямление предъявляет повышенные требования к параметрам LC фильтра.
Применение частотных преобразователей
Сегодня трудно найти область, где не нашли своего применения частотно-регулируемые приводы асинхронных электродвигателей.
На крупных блочных электрических станциях частотные регуляторы осуществляют регулирование подачи топлива в котлы, гибко адаптируя работу энергоблоков к изменяющемуся режиму работы энергосистемы. В этом качестве частотные приводы функционируют как исполнительные звенья автоматизированной системы управления технологическими процессами электростанции.
Частотное регулирование приводов мощных вентиляторов промышленных систем позволяет автоматически поддерживать оптимальные условия их работы при изменении внутренних и внешних факторов, экономя при этом электрическую энергию и продлевая ресурс оборудования.
Большую финансовую экономию принесло внедрение частотных регуляторов в городские системы водоснабжения. Рабочее давление в водоводах питьевого назначения ранее поддерживалось в основном путём оперирования задвижками. Это приводило к неэффективной работе насосного оборудования, повышенному расходу энергии и износу. Насосы, оснащённые частотным приводом способны гибко реагировать на изменение расхода воды в системе и изменяя частоту вращения поддерживать необходимое давление.
Применение частотных регуляторов не обошло стороной и область бытовой электротехники. Все современные стиральные машины и пылесосы оснащены частотным приводом. Это позволило отказаться от редукторов и ремённых приводов и повысить экономичность работы домашних агрегатов.
Как характеристики электросети влияют на работу насосных двигателей
 Электротехническая область стремительно развивается, поэтому паровые машины давно канули в лету, а электрические стали использоваться во многих сферах. Одним из таких популярных на сегодняшний день устройств является электрический насос. Сразу стоит уточнить, что данным понятием обозначается целостный механизм, состоящий из двигателя, редуктора или иного передаточного механизма, которое выполняет необходимые функции, и исполнительного органа (лопасть, крыльчатка, поршень).
Электротехническая область стремительно развивается, поэтому паровые машины давно канули в лету, а электрические стали использоваться во многих сферах. Одним из таких популярных на сегодняшний день устройств является электрический насос. Сразу стоит уточнить, что данным понятием обозначается целостный механизм, состоящий из двигателя, редуктора или иного передаточного механизма, которое выполняет необходимые функции, и исполнительного органа (лопасть, крыльчатка, поршень).
В основе насоса лежит электрический двигатель, имеющий высокий коэффициент полезного действия (83-95%). Для них характерна достаточно простая конструкция, высокий уровень надежности и универсальность. От типа двигателя и режима его работы напрямую зависят итоговые параметры любого механизма, работающего от электрического тока.
При отсутствии специфических требований (а их чаще всего нет), используют асинхронные двигатели, оснащенные короткозамкнутым ротором. Конструкция устройства включает в себя корпус с неподвижной частью или статором, который имеет обмотку и вращающуюся часть, то есть ротор. Вращение ротора обеспечивается путем образования вращающегося магнитного поля. Оно в свою очередь создается напряжением, которое подводится к обмотке статора. Путем контакта магнитного поля с обмоткой ротор начинает вращаться. Что касается самой обмотки, то в электрических двигателях – это металлический каркас с намотанной на него медной проволокой, обработанной изолирующим лаком.
Электродвигатель – это сердце насоса, а электроэнергия – это его душа. Насос просто не сможет работать без нее. Все параметры электрической энергии должны быть приведены к расчетным. Если какой-то из них не соответствует стандартам, режим работы устройства меняется. Базовыми параметрами электроэнергии служат напряжение, частоты и форма. При этом каждая страна имеет свои стандарты для этих показателей. Напряжение является движущей силой, это та энергия, освобождающаяся в процессе движения заряда от пункта А до пункта Б.
Руководствуясь ГОСТом, можно выделить, что в странах СНГ напряжение составляет 220 В (плюс/минус 10%). Частота – это параметр, показывающий, как часто меняется полярность напряжения за единицу времени. Стандарт – 50 Гц (плюс/минус 1%). Базовые характеристики для насоса – это напор, подача и объединяющая две характеристики рабочая точка. В свою очередь напор представляет собой создаваемое насосом давление жидкости, а подача – это количество перекачиваемой за конкретное время воды. Поскольку устройство преобразует энергию вращения, которую создает электродвигатель, в работу, которая совершается исполнительным органом, важно сделать расчетную скорость вращения стабильной. Еще одна из главных особенностей асинхронного двигателя – это скольжение. Данный параметр показывает разницу в скорости вращения магнитного поля, которое создается обмоткой ротора и статора. От величины нагрузки и напряжения зависит скольжение: чем выше нагрузка или ниже напряжение, тем больше скольжение.
Существует формула, отражающая взаимосвязь скорости вращения ротора и напряжения сети:
N=N синхр х (1-Kнагр х Uрез х Sном);
N – итоговая скорость вращения насосного электродвигателя;
N синхр – синхронная скорость;
К нагр – коэффициент нагрузки на электродвигатель;
U рез – показатель, получаемый путем деления квадрата номинального напряжения на квадрат фактического напряжения;
S ном – величина скольжения в номинале.
Таким образом, видно, что, если напряжение сети станет меньше номинального, скорость вращения также упадет, и в результате снизится и общая производительность агрегата. Следует обратить внимание, что такое заключение актуально для насосных моторов, которые работают в максимальной нагрузке. В случае если агрегат имеет «запас», то при снижении напряжения сети работа насоса почти не изменяется.
Другое отрицательное проявление уменьшения напряжение – это нагрев обмоток. Если параметр опустится ниже стандартного значения на 1%, магнитный поток сократится на 3%. Зависимость отражена в следующей формуле:
P = U х I,
P — мощность электромотора;
U – напряжение;
I — ток, который потребляет электродвигатель.
Исходя из этого, можно сделать вывод, что при сохранении мощности мотора и уменьшении напряжения, потребление тока повышается. Если значение последнего перескочит расчетные параметры, произойдет нагрев обмоток, а это увеличивает амортизацию и, соответственно, сокращает срок службы. Были случаи, когда случалась поломка двигателя. Если напряжение вышло за пределы номинальной границы, образуется «электрический пробой» изоляции катушки и, конечно же, сокращается срок эксплуатации мотора. Говоря иначе, двигатель «сгорает».
На скорость вращения магнитного поля и ротора влияет частота электросети. Это отражается в формуле:
n= 60 х f / P,
n — синхронная скорость вращения поля,
f — частота электрической сети,
P – число пар полюсов обмотки статора.
Таким образом, если число пар полюсов будет всегда одним и тем же, любой скачок частоты окажет влияние на вращение мотора и его механическую мощность. Специфический типа насосов – шнековые или вибрационные. Они не имеют классического двигателя, а потому таких поломок, которые случились в результате увеличения или уменьшения напряжения, не бывает. Точнее, они происходят иначе. Если монтаж агрегата был произведен в скважине или колодце, и он работает в номинальных пределах при нормальном напряжении, то в случае резкого уменьшения последнего насос не сможет поднять воду, а вследствие этого некоторые агрегаты вообще выходят из строя. При резком же увеличении напряжения качающая мембрана двигается быстрее, в результате чего механизм просто разбивает себя. Аналогичная ситуация происходит и при уменьшении/увеличении частоты электросети.
Качественный насос – это такой насос, который способен работать длительное время без поломок по принципу «включил и забыл». Конечно же, стоимость такого агрегата может встать в копеечку, а потому грамотным выходом из ситуации является обеспечение защиты устройства от скачков в электросети. Так, например, можно приобрести стабилизатор, который служит для контроля и регулировки напряжения. По мощности его следует выбирать с запасом 20-30%. Это необходимо потому, что в момент включения мотора потребляемая мощность резко возрастает. Еще одни защитные устройства – это блоки управления, которые открывают хорошие возможности для продления работы насоса.
Переделка асинхронных двигателей
При переделке асинхронных двигателей на новое число оборотов меняют число пар полюсов в статоре и фазном роторе, изменяя в их обмотках шаг и число катушек в катушечной группе.
Число пар полюсов изменяется обратно пропорционально магнитному потоку. Так, при уменьшении вдвое числа пар полюсов магнитный поток увеличивается также вдвое. Магнитный поток изменяется прямо пропорционально числу оборотов.
При увеличении магнитного потока, приходящегося на полюс, необходимо соответственно уменьшить число эффективных проводов в пазах статора. Это позволит увеличить сечение проводов обмотки, а следовательно, мощность электродвигателя.
Число эффективных проводов в пазу двигателя при переходе на новое число оборотов изменяется прямо пропорционально старому числу оборотов и обратно пропорционально новому числу оборотов.
Эта зависимость может быть выражена так:

При переходе на новое число оборотов мощность изменяется почти пропорционально этому числу оборотов, т. е.

С учетом изменения коэффициента мощности cos φ и к. п. д. η при новом числе оборотов двигателя его новая мощность:

В случае перехода на новое число оборотов сечение эффективного провода в пазу изменяется прямо пропорционально старому числу эффективных проводов и обратно пропорционально новому их числу, т. е.

При изменении числа оборотов изменяются условия охлаждения двигателя, поэтому рекомендуется при понижении числа оборотов уменьшить мощность двигателя на 10 — 12%, а при повышении числа оборотов увеличить мощность на 10 — 12%.
Перевод двигателя на новое число оборотов может вызвать нежелательные явления, в частности может измениться номинальный вращающий момент двигателя М.
Поэтому проверяют величину М, пользуясь формулой:

где: Рн — номинальная мощность двигателя, кет; n — число оборотов двигателя, об/мин.
При перемотке двигателя на большее число оборотов увеличивается шаг обмотки и, следовательно, длина ее лобовых частей. Это учитывают при переделке двигателей.
В частности, предварительно убеждаются путем замеров в том, что глубина подшипниковых щитов допускает увеличение вылета лобовых частей обмотки и лобовые части могут быть размещены в щитах с соблюдением требуемых расстояний между лобовыми частями обмотки и внутренними поверхностями крышек.
У электрических машин, прошедших ремонт или переделку на новые параметры, нередко оказывается поврежденной окраска корпуса.
Ее восстанавливают путем удаления остатков отслаивающейся краски и нанесения на очищенную и прошпаклеванную для заполнения выбоин и неровностей поверхность грунтовки. Корпус машины покрывают двумя слоями краски, просушивая каждый слой до полного высыхания.
На торцах окрашенной машины красными стрелками указывают направление вращения ротора, а на корпусе машины укрепляют новую паспортную табличку с указанием старого номера, новых основных параметров и даты ремонта.
«Ремонт электрооборудования промышленных предприятий»,
В.Б.Атабеков