
У ВАС АВАРИЙНАЯ СИТУАЦИЯ
У ВАС АВАРИЙНАЯ СИТУАЦИЯ?
Звоните нам по сервисному телефону. Мы всегда доступны для Вас по данному номеру: T +49 5066 90333-0
emergency(at)helmke.de

Новое
ПРИВОДНЫЕ СИСТЕМЫ, РАЗРАБОТАННЫЕ HELMKEHELMKE является признанным во всем мире специалистом по обеспечению комплексными приводными системами. Преобразователи, разработанные HELMKE, проектируются и изготавливаются для выполнения конкретных задач заказчиков и специфических отраслевых задач. [ [подробнее] ]
АСИНХРОННЫЕ ЭЛЕКТРОДВИГАТЕЛИ С ФАЗНЫМ РОТОРОМ HELMKE – СОЗДАНО НАВЕКА

Асинхронные электродвигатели с фазным ротором используются во многих приводах высокой мощности. Наиболее часто их применяют в сырьевой промышленности, например, при добыче руды и минералов или на производствах связующих веществ, таких как цемент, известняк и гипс, в различного рода дробильных установках, роликовых прессах и прокатных станах, а также в крупногабаритных вентиляторах, насосах и конвейерах.
Асинхронные электродвигатели с фазным ротором используются во многих приводах высокой мощности. Наиболее часто их применяют в сырьевой промышленности, например, при добыче руды и минералов или на производствах связующих веществ, таких как цемент, известняк и гипс, в различного рода дробильных установках, роликовых прессах и прокатных станах, а также в крупногабаритных вентиляторах, насосах и конвейерах.
К сожалению, наиболее прочные и наиболее экономичные асинхронные короткозамкнутые электродвигатели обладают свойством, из-за которого их пуск непосредственно от сети затруднен, а в некоторых случаях невозможен. Так, в состоянии покоя и на небольших оборотах в момент пуска они создают лишь малый крутящий момент, хотя при этом требуют очень сильный ток, превышающий номинальный ток электродвигателя в несколько раз. Поэтому работающая от привода машина, технологический процесс и сеть до привода ограничивают применение данного простейшего концепта привода.
Например, для работы загруженного прокатного стана нужен очень большой крутящий момент при пуске или же особый пусковой момент трогания величиной, вероятно, намного превышающей номинальный крутящий момент используемого электродвигателя. Большая инерция загруженного стана приводит к продолжительному периоду выхода на рабочий режим, поэтому нужный высокий крутящий момент необходим в течение продолжительного времени даже при малых оборотах. Если по требованиям технологического процесса пуск выполняется несколько раз в день, то тепловая нагрузка на элементы привода в этом случае довольно высокая, что может ограничивать число пусков.
В случае высокого отношения номинальной мощности электродвигателя к нагрузочной способности сети до электродвигателя большая перегрузка по току при пуске приводит к существенной просадке напряжения, что может вызвать перебои в работе параллельных потребителей. Это и есть случай установки одиночных электродвигателей большой мощности относительно общей мощности сети.
Конструкция асинхронного электродвигателя с фазным ротором при использовании компактного пускового устройства позволяет достичь пусковой момент соизмеримый с максимальным моментом двигателя, что в частности может достигать двух- а то и трехкратному номинальному моменту, при этом пусковой ток соответствует номинальному току двигателя, либо незначительно его больше.
В таких случаях использование асинхронных электродвигателей с фазным ротором является более рациональным. В отличие от частотно-регулируемых приводов, когда для больших пусковых моментов необходимо использовать преобразователи, мощностью большей номинальной, что в номинальном режиме повышает потери, пусковой момент асинхронного двигателя с фазным ротором зависит от его физических свойств, а пусковой реостат работает только в процессе разгона. При изменении пусковой характеристики с помощью изменения внешнего сопротивления роторной цепи возникают лишь незначительно большие потери в двигателе, таким образом количество допустимых пусков не ограничивается нагревостойкостью самого двигателя.
Асинхронный двигатель максимальные обороты
механики подтвердили что да можно в 2 раза увеличить без проблем.
Да?
Двигатель 3000 на 100 Гц будет около 6000 об/мин. Болгарка столько крутит. Подшипники сколько проживут? А редуктор (не напрямую ведь двигатель подключен)?
Возникла необходимость увеличить производительность (скорость) конвейера, механики подтвердили что да можно в 2 раза увеличить без проблем.
Я думаю механики имели ввиду, что можно без проблем увеличить скорость именно конвейера, а не электродвигателя (во всяком случае за ЭД у нас отвечают электрики, а вот за конвейер уже механики). Конвейер то может быть и можно, а вот по двигателю читайте выше.
Мужики огромное спасибою В принципе понятно. Двигатель 3000 об/мин.
http://s5.postimage.org/u5o64e8kz/20150117_131531.jpg (http://postimage.org/image/u5o64e8kz/)
Механики естественно касательно конвейера дали добро на разгон только мехчасть. Крутануть конечно же попробуем. Всеравно редуктор спалим скорей всего, потому что редуктор червячный и сильно сомневаюсь что очень выдюжит повышенные обороты. Ну то не моя забота, просто главный механик решил выпендрится перед руководством, а потом всё началось, начали нас напрягать. Что либо объяснять бесполезно.
Еще такой вопрос.
Привезли машину Б/У, ну там куча всяких проблем, в том числе и по мехчасти.
В общем нужно запускать двигатель в режиме тяжелого пуска. Ток при запуске прыгает до 90А.
Двигатель 3кВт. После разгона двигатель выходит на свой режим и нормально крутится.
Поставили задачу переделать всю автоматику и если с контроллерами и прочьими заумностями проблем нет то с мотором есть.
На двигатель нацепили ПЧВ103-4К0-В. Привод не может раскрутить двигатель в режиме плавного разгона выдает ошибку «превышен предельный крутящий момент» код ошибки 12. Скорость пока не пробовали регулировать.
Как решить проблему?
Что либо объяснять бесполезно.
— а вот интересно . на Чернобыльской АЭС такая же ситуация была? :rolleyes:
Подумай, прежде чем руки запускать в оборудование, дружище, кому будешь объяснять — начальнику или прокурору? — Помощников намотать срок найдёшь легко — помощников смотать . вряд ли.
Крутите на любую частоту и не бойтесь за электричество, все — ОК! Ограничение существует в механической области — это подшипники. До 3000 об/мин нормально работают любые, при 5000 — 6000 оборотах обычные уже конкретно греются и могут клинить, поэтому замена на быстроходные, либо кратковременные выходы на данные скорости. Скорости 3000 — 4000 подсаживают ресурс в длительной переспективе. Да, и осторожнее с торможением — делать плавнее, ставить резисторы..
При тяжелых пусках — делайте разгон более плавным, смотрите (увеличивайте) настройку ограничения по току и по моменту (это разные параметры!) кроме того есть настройка допустимого времени перегрузки до срабатывания защиты. Обязательно точно указывайте параметры двигателя в настройках ПЧ и проводите автонастойку ПЧ на двигатель. Ни двигатель, ни ПЧ не выйдут из строя, возможна лишь тепловая интегральная перегрузка за счет плохого охлаждения и частых старт-стопов.
Векторные режимы — наше все! единственная причина не использовать вектор — это несколько двигателей включенных параллельно на один ПЧ. Есть правда еще одна — это когда производитель ПЧ сильно лукавит указывая наличие «векторного» режима для своих поделок, и называя «векторным» например, подъем момента в низких частотах.
Скорость регулировать нужно.
В том и проблема.
ПЧ — 4кВт двигатель — 3кВт.
С пускателей принципе двигатель запускается в допустимом режиме 7-8 Inom, на автоматическом выключателе стоит отсечка 10-12Inom, на нормальные обороты выходит за максимум 5-6 секунд. Запускается не часто.
Я в инструкции не нашел как регурилировать ток перегруза и время перегруза и ток отсечки.
Правильно ли я понимаю что скорость вращения ротора двигателя можно контролировать только энкодером. У нас есть привода которые могут контролировать скорость вращения ротора без энкодера, наверное не достаточно точно, но могут.
1. Для работы в «тяжелых» условиях ПЧ должен быть «больше» двигателя на следующий типоразмер(по мощности) , т.е для двигателя 3квт при тяжелых условиях надо брать ПЧ на 7.5 кВт. При этом надо настроить параметры двигателя правильно иначе ПЧ может движок «подпалить» , т.к настройки по умолчанию на макс.мощность.
2. Векторный режим для конвейера не нужен.
3. 100гц — крутится без нагрузки мотор будет , но. будет слышно , что ему не очень хорошо при этом . Занимался подобными экспериментами , уже при 80гц на реальной установке начинаются «проскальзывания» и «вибрация» железа электродвигателя . Поэтому 100гц — это так движок в холостую покрутить , посмотреть и. отказаться от этой затеи .
Частотный регулятор скорости для асинхронного двигателя
Регулировка скорости изменением величины напряжения снижает момент и также увеличивает потери мощности. Регулировка частоты вращения путем изменения числа полюсов осуществляется ступенчато, кроме того, этот способ пригоден только для специальных многоскоростных двигателей с несколькими обмотками неподвижной части.
Асинхронный двигатель – самый распространенный электропривод технологического оборудования. Главная особенность таких электрических машин – постоянная скорость вращения вала. Ее регулировку осуществляют:
- Механическим способом. Для этого вал подключают к редукторам, муфтам и другим устройствам.
- Путем изменения числа пар полюсов, величины или частоты питающего напряжения обмоток статора.
Механическое регулирование усложняет кинематическую схему электропривода, ведет к потерям мощности и нерациональному расходу электроэнергии.
Наиболее перспективный метод регулирования уголовной скорости ротора – преобразование частоты питающего напряжения. Этот способ обеспечивает сохранение механических характеристик во всем диапазоне и обладает рядом других преимуществ.
Устройство и принцип работы частотного регулятора
Принцип частотного регулирования основан на зависимости угловой скорости вращения ротора от частоты напряжения на обмотках статора. С появлением IGBT-транзисторов и GTO-тиристоров наибольшее распространение получила схема преобразования частоты на базе широтно-импульсного модулятора.
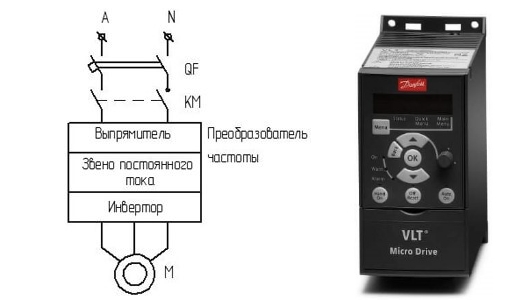
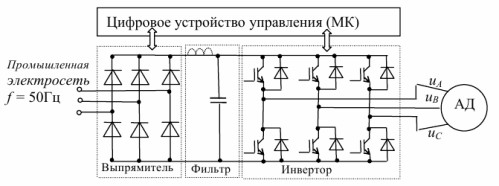
Такие преобразователи частоты состоят:
- Из силового выпрямителя с С или LC фильтром для сглаживания пульсаций.
- Из инвертора на IGBT-транзисторах для преобразования постоянного напряжения в переменное, заданной частоты и амплитуды.
- Из блока управления для генерации отпирающих силовые транзисторы импульсов.
Переменное напряжение выпрямляется и преобразуется в постоянное, затем снова инвертируется в переменное. Частота на силовом выходе ПЧ определяется длительностью отпирающих силовые транзисторы импульсов, поступающих со схемы управления.
Такой способ регулирования позволяет изменять частоту и амплитуду напряжения в силовой цепи электродвигателя, а значит управлять скоростью вращения ротора и моментом на валу электрической машины.
Структура частотного регулятора
Большинство частотных преобразователей для электродвигателей до 690 В выполнены по схеме двухуровневых инверторов напряжения. Они позволяют моделировать напряжение питания необходимой формы, амплитуды частоты. Такие устройства состоят из неуправляемого выпрямителя, 2-х транзисторных ключей на каждую фазу и конденсатора. Выходное напряжение содержит высшие гармоники, которые сглаживаются индуктивной нагрузкой. Специальные фильтры применяют относительно редко.
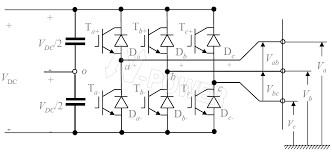
К недостаткам такой схемы является ограничение величины выходного напряжения, которое определяется максимальным напряжением полупроводниковых устройств.
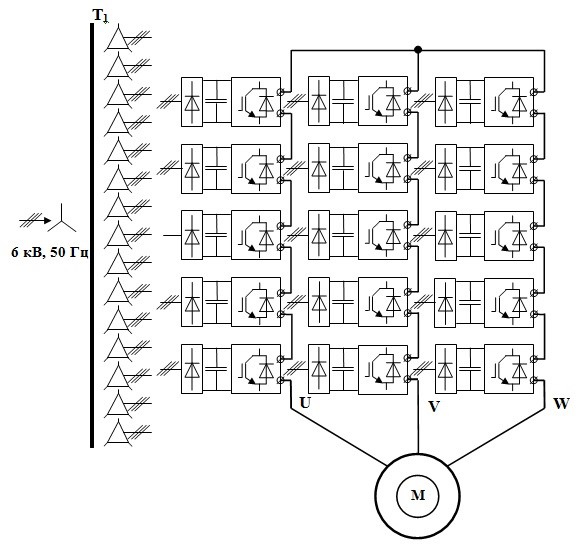
Для высоковольтных приводов используются многоуровневые схемы регулирования. Они состоят из нескольких однофазных инверторов, соединенных последовательно. Такая схема позволяет избежать резонансов, обеспечивает высокое быстродействие, снижает скорость нарастания напряжения. Такие ПЧ имеют модульную конструкцию. При выходе из строя одной из ячеек, ее легко заменить. К недостаткам этой схемы относятся необходимость отдельного источника питания для каждого модуля, функции которого выполняет трансформатор специального назначения.
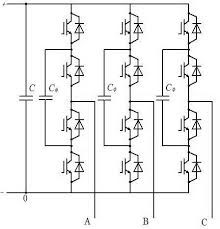
Преобразователи частоты с плавающими конденсаторами позволяют обойтись без входного трансформатора и увеличивать число ячеек в зависимости от требуемой мощности. Такое решение обеспечивает снижение высших гармоник, уменьшает скорость нарастания напряжения.
Для регулировки скорости электродвигателей с повторно-кратковременным режимом работы частыми реверсами применяют инверторы тока. Эти устройства представляют собой управляемый выпрямитель и инвертор на тиристорах. Для уменьшения помех в цепи нагрузки в схему включается расщепленный индуктивный фильтр. Выходное напряжение таких устройств имеет форму аппроксимированной синусоиды. Для сглаживания его формы обязательно включение перед электродвигателем конденсаторов. Главное достоинство таких ПЧ – возможность рекуперации электроэнергии обратно в электросеть.
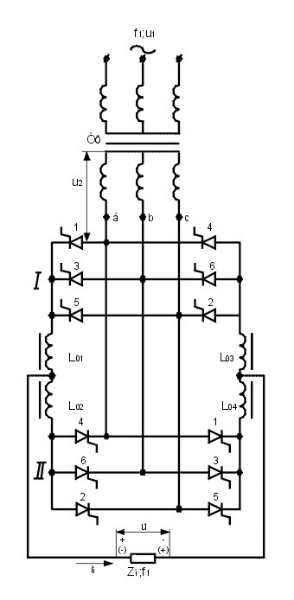
Прямые преобразователи частоты не содержат конденсаторов. Главное их преимущество – небольшие габариты и значительная мощность нагрузки. Такие устройства используются в составе мощных электроприводов работающих на низких скоростях. ПЧ этого типа выполнены на базе тиристорных преобразователей. На входе прямых ПЧ установлен фазосдвигающий трансформатор, устраняющий низшие гармоники и выполняющий функцию источника питания для каждого преобразователя. Прямые ПЧ требуют сложной схемы управления.
Состав частотных преобразователей
Кроме выпрямителя, ШИМ-модулятора и инвертора, в состав частотного преобразователя входят:
Устройство для ввода данных и обмена информаций с ПК, другими частотными преобразователями.
- Встроенная энергонезависимая память. В этом устройстве фиксируются аварийные отключения, изменения настроек, а также другие данные.
- Управляющий контроллер, обеспечивающий реализацию алгоритмов управления, обработку данных с датчиков, защитное отключение при ненормальных режимах работы.
- ЭМ-фильтр. Это устройство обеспечивает снижение реактивной высокочастотной составляющей, снижающей качество электроэнергии и отрицательно влияющей на работу электродвигателя.
- Вентилятор и радиатор для принудительного охлаждения и отвода тепла силовых транзисторов.
- Тормозной прерыватель и другие элементы.
Кроме аппаратной части, преобразователи частоты содержат программное обеспечение. Контроллеры с открытой логикой позволяют вносить изменения в стандартное ПО, поставляемое производителем, и самостоятельно программировать ПЧ.
Однофазные преобразователи частоты
Однофазные асинхронные электродвигатели широко применяются в качестве приводов насосных агрегатов, вентиляторов, маломощных станков. Для регулирования частоты вращения этих электрических машин применяются 2 основных способа:
- Изменение величины напряжения питания.
- Изменение частоты питающего напряжения.
Для регулирования питающего напряжения применяются трансформаторные, автотрансформаторные, тиристорные, симисторные и транзисторные преобразователи. Изменение частоты вращения путем регулирования напряжения имеет ряд серьезных недостатков:
- Увеличение скольжения и сильный нагрев обмоток статора.
- Узкий диапазон регулирования.
Кроме того, постоянная составляющая питающего напряжения на выходе тиристорных и симисторных устройств вызовает увеличение шума при работе, рывки и другие нежелательные явления.
Частотное регулирование лишено этих недостатков. Однофазные ПЧ применяются в холодильном оборудовании, системах вентиляции, бытовых насосах.
Такие электроприводы обеспечивают:
- Стабильную работу однофазного двигателя при любой частоте вращения.
- Снижение потребления электроэнергии.
- Возможность автоматической регулировки частоты вращения с обратной связью по изменению одного или нескольких технологических параметров.
- Удаленное управление и контроль характеристик.
- Защиту от ненормальных режимов работы и коротких замыканий.
- Интеллектуальное управление электродвигателем в соответствии с заданным алгоритмом.
- Возможность пуска без фазосдвигающего элемента.
- Поддержание необходимого момента на валу во всем диапазоне изменения скорости.
Кроме базовых составляющих, в состав однофазного преобразователя частоты входят ПИД-регулятор, ПЛК-контроллер, устройство для обмена данными с удаленным оборудованием, пульт дистанционного управления. При введении дополнительных настроек допустимо применение трехфазного ПЧ для однофазных двигателей переменного тока.

Таким образом, управление однофазными и трехфазными асинхронными электродвигателями путем изменения частоты значительно превосходит метод регулирования величины напряжения, механические способы.
Регулятор оборотов асинхронного и коллекторного двигателя с таходатчиком UX-52
Регулятор оборотов электродвигателя UX-52 представляет собой модуль Китайского производства. В отличии от модуля US-52 имеет в наличии встроенный электронный тахометр и цифровой дисплей. Подходит для регулировки асинхронных двигателей переменного тока 220VAC со встроенным тахогенератором, а так же коллекторных двигателей переменного тока 220VAC со встроенным тахогенератором, чаще всего это двигатели стиральных машин. Может быть использован как для замены при ремонте в различном оборудовании, так и для управлении оборотами электродвигателя в различных самодельных конструкциях таких как, точильные станки, токарные, фрезерные и сверлильные станки, медогонки, гончарные круги, и другое широко применяемое оборудование. Данный модуль заявлен, как регулятор оборотов электродвигателя мощностью до 180 ватт. Однако при незначительных доработках, таких как установка радиатора на симистор и/или его замена на более мощный позволит подключить и более мощный двигатель ( ≈ до 400W). У производителя заявлен диапазон регулировки скорости в интервале 90
1400 об/мин. Однако и здесь не все так просто. На приведенном ниже видео показан пример подключения коллекторного двигателя с оборотами до 15000 об/мин. На боковой панели модуля есть подстроечный резистор с помощью которого можно установить максимальные обороты. Однако стоит учесть, что обороты выше 5000 об/мин.будут отображаться совсем не корректно. Проще говоря регулировка работать будет, но показателей количества оборотов вы не узнаете. Это следует учитывать при покупке модуля UX-52. К особенностям устройства можно отнести мягкий старт, чтобы достичь плавного запуска двигателя, управление двигателем в процессе работы, светодиодный дисплей, четкий и интуитивно понятный, стабильная производительность. Широко используется на линиях упаковки, полиграфии, пищевой промышленности, электронике, приборостроении, машиностроении и других отраслях производственной деятельности.
Параметры регулятора оборотов электродвигателя UX-52
- Тип модуля: регулятор оборотов электродвигателя
- Вход напряжение: 220VAC
- Выходное напряжение: 220 В
- Диапазон рабочего напряжения: -10%
+ 10%
Частота: 50 Гц,≤-2%
+ 2%
1400 об/мин
Подключение модуля UX-52
Подключите COM и CW, двигатель вращается в прямом направлении;
Подключите COM и CCW, двигатель вращается в обратном направлении.
Соедините последовательно щетки и обмотку коллекторного двигателя.
К оставшимся двум выводам щеток и обмотки подключаем красный и черный выводы регулятора.
Желтый и синий выводы регулятора подключаем к таходатчику.
Перед включением установите регулятор скорости на «0», чтобы избежать внезапного сильного тока и повреждения контроллера.
Видео обзор подключения и работы модуля UX-52 к коллекторному двигателю от стиральной машины:

