Avr схема управления двигателями
Digitrode
цифровая электроника вычислительная техника встраиваемые системы
- Вычислительная техника
- Микроконтроллеры микропроцессоры
- ПЛИС
- Мини-ПК
- Силовая электроника
- Датчики
- Интерфейсы
- Теория
- Программирование
- ТАУ и ЦОС
- Перспективные технологии
- 3D печать
- Робототехника
- Искусственный интеллект
- Криптовалюты
Чтение RSS
Как управлять двигателем постоянного тока с помощью микроконтроллера AVR ATmega
Двигатели постоянного тока являются наиболее широко используемыми электродвигателями. Эти моторы можно найти практически везде, от небольших проектов до продвинутой робототехники.

Сегодня мы научимся управлять двигателем постоянного тока с помощью микроконтроллера AVR Atmega16. Но прежде чем идти дальше, давайте узнаем больше о двигателе постоянного тока.
Двигатель постоянного тока – это устройство, которое преобразует электрическую энергию в механическую. В частности, двигатель постоянного тока использует постоянный ток для преобразования электрической энергии в механическую энергию. Основным принципом двигателя является взаимодействие между магнитным полем и током для создания силы внутри двигателя, которая помогает двигателю вращаться. Поэтому, когда электрический ток проходит через катушку в магнитном поле, генерируется магнитная сила, которая создает крутящий момент, приводящий к движению двигателя. Направление двигателя контролируется путем изменения направления тока. Также его скорость можно варьировать, изменяя подаваемое напряжение. Поскольку микроконтроллеры имеют выводы ШИМ, это можно использовать для управления скоростью двигателя.
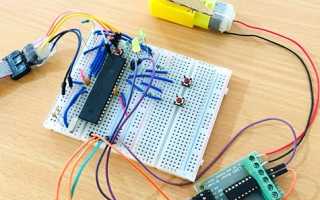
В этом проекте работа двигателя постоянного тока будет продемонстрирована с помощью микроконтроллера Atmega16. Драйвер двигателя L293D будет использоваться для изменения направления тока и направления движения. Драйвер двигателя L293D использует конфигурацию цепи H-мост, которая выводит необходимый ток на двигатель. Две кнопки используются для выбора направления двигателя. Одна кнопка используется для выбора вращения по часовой стрелке, а другая – для выбора режима против часовой стрелки.

Схема подключения микроконтроллера ATmega, драйвера L293D и двигателя постоянного тока следующая.

Теперь перейдем к программированию микроконтроллера. В данном случае Atmega16 программировался с использованием USBASP и Atmel Studio7.0.
Двигатель постоянного тока подключается через драйвер двигателя L293D. Двигатель постоянного тока будет вращаться в двух направлениях при нажатии соответствующей кнопки. Одна кнопка будет использоваться для вращения двигателя постоянного тока в направлении по часовой стрелке, а другая кнопка будет использоваться для вращения двигателя постоянного тока в направлении против часовой стрелки. В данном случае у нас используются две библиотеки io.h и delay.h.
Полный код программы приводится далее, просто загрузите программу в Atmega16 и используйте две кнопки для вращения двигателя постоянного тока по часовой стрелке и против часовой стрелки.

При желании вы можете подключить контакты двигателя к любому контакту GPIO в зависимости от используемых GPIO. Также важно использовать драйвер двигателя для снижения нагрузки на микроконтроллер, так как микроконтроллеры не способны обеспечить необходимый ток для работы двигателей постоянного тока.
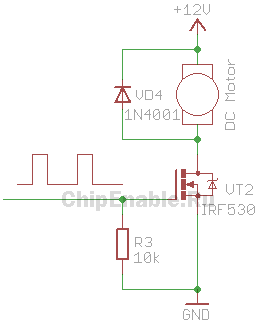
Простая схема управления двигателем постоянного тока
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет «воспринимать» среднее значение подводимой к нему энергии.
Схема для генерации ШИМ сигнала
Существует много схем для генерации ШИМ сигнала. Одна из самых простых — это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
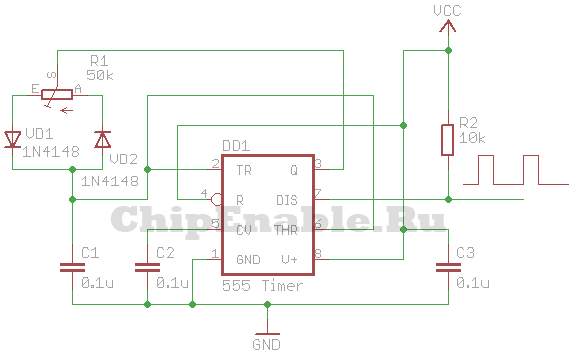
Напряжение питания схемы VCC может быть в диапазоне 5 — 16 Вольт. В качестве диодов VD1 — VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.
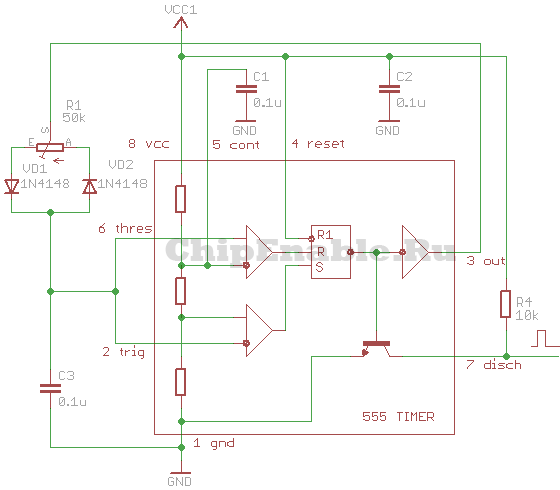
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
ШИМ регулятор оборотов двигателя постоянного тока
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
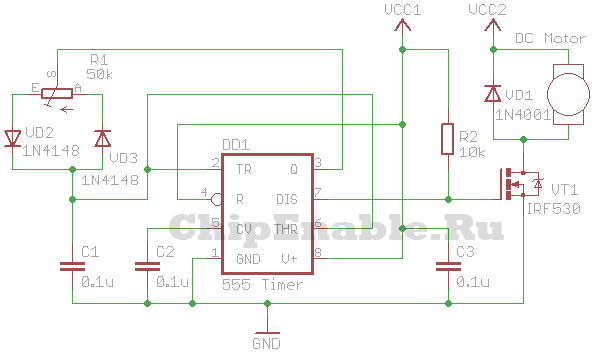
VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
Автоматический ввод резерва

Автоматическое включение резерва — включение автоматическим устройством резервного оборудования взамен отключившегося основного. Широко применяется в энергетике, служит для обеспечения бесперебойного электроснабжения потребителей. [1] [2] [3]
В энергетике: автомат включения резерва (АВР) — автоматическое устройство, осуществляющее автоматический ввод резервных источников питания или включение выключателя, на котором осуществляется деление сети. [4] :78
Потребители: коммутационный аппарат переключения (переключатель питания) (англ. Transfer switch ) — аппарат для переключения одной или нескольких цепей нагрузки от одного источника к другому. [5] :п. 2.1.1
Отдельные установки: автоматическое включение электродвигателей резервных механизмов — включение резервного оборудования при выявлении нарушения технологического режима с помощью реле, реагирующих на неэлектрические величины. [4] :109
На 2018 год в России отсутствует единая терминология для сетей электроснабжения и электроэнергетики в области надежности электроснабжения. [6]
Нормативно оборудование для переключения питания с одного источника на другой делится на: [7]
- с вентильными переключающими аппаратами переменного тока;
- c релейно-контакторными переключающими аппаратами переменного тока (IEC 60947-6-1);
- коммутационная аппаратура ручного переключения (РКАП);
- коммутационная аппаратура дистанционного переключения (ДКАП);
- коммутационная аппаратура автоматического переключения (КААП); [8]
- для переключения источников постоянного тока;
- коммутационные устройства с подключением к источнику бесперебойного энергоснабжения (IEC 62040).
Содержание
- 1 Автомат включения резерва
- 1.1 Принцип действия
- 2 Коммутационный аппарат переключения (переключатель питания)
- 2.1 Автоматический
- 3 См. также
- 4 Источники
- 5 Примечания
- 6 Ссылки
Автомат включения резерва [ править | править код ]


Автоматическое восстановление питания должно обеспечиваться для:
- электроприемников первой категории — обеспечиваются электроэнергией от двух независимых взаимно резервирующих источников питания;
- особая группа электроприемников первой категории — обеспечиваются электроэнергией от трех независимых взаимно резервирующих источников питания. [9]
Таким образом, кроме неудобств в повседневной жизни человека, длительный перерыв в электропитании может привести к угрозе жизни и безопасности людей, материальному ущербу и другим, не менее серьёзным последствиям. Гарантированное питание можно реализовать, осуществив электропитание каждого потребителя от двух источников одновременно (для потребителей I категории так и делают), однако подобная схема имеет ряд недостатков:
- Токикороткого замыкания при параллельной работе источников питания гораздо выше, чем при раздельном питании потребителей.
- В питающих трансформаторах выше потери электроэнергии
- Релейная защита сложнее, чем при раздельном питании.
- Необходимость учета перетоков мощности вызывает трудности, связанные с выработкой определённого режима работы системы.
- В некоторых случаях не получается реализовать схему из-за того, что нет возможности осуществить параллельную работу источников питания из-за ранее установленной релейной защиты и оборудования.
В связи с этим возникает необходимость в раздельном электроснабжении и быстром восстановлении электропитания потребителей. Решение этой задачи и выполняет АВР. АВР может подключить отдельный источник электроэнергии (генератор, аккумуляторную батарею) или включить выключатель, разделяющий сеть, при этом перерыв питания может составлять всего 0.3 — 0.8 секунд.
При проектировании схемы АВР, допускающей включение секционного выключателя, важно учитывать пропускную способность питающего трансформатора и мощность источника энергии, питающих параллельную систему. В противном случае может получиться так, что переключение на питание от параллельной системы выведет из строя и её, так как источник питания не сможет справиться с суммарной нагрузкой обеих систем. В случае если невозможно подобрать такой источник питания, обычно предусматривают такую логику защиты, которая отключит наименее важных потребителей тока обеих систем.
АВР разделяют на:
- АВР одностороннего действия. В таких схемах присутствует одна рабочая секция питающей сети, и одна резервная. В случае потери питания рабочей секции АВР подключит резервную секцию.
- АВР двухстороннего действия. В этой схеме любая из двух линий может быть как рабочей, так и резервной.
- АВР с восстановлением. Если на отключенном вводе вновь появляется напряжение, то с выдержкой времени он включается, а секционный выключатель отключается. Если кратковременная параллельная работа двух источников не допустима, то сначала отключается секционный выключатель, а затем включается вводной. Схема вернулась в исходное состояние.
- АВР без восстановления.
АВР должен срабатывать однократно. Это требование обусловлено недопустимостью многократного включения резервных источников в систему с неустранённым коротким замыканием.
АВР должен срабатывать всегда, в случае исчезновения напряжения на шинах потребителей, независимо от причины. В случае работы схемы дуговой защиты АВР может быть блокирован, чтобы уменьшить повреждения от короткого замыкания. В некоторых случаях требуется задержка переключения АВР. К примеру, при запуске мощных двигателей на стороне потребителя, схема АВР должна игнорировать просадку напряжения.
Принцип действия [ править | править код ]
Реализацию схем АВР осуществляют с помощью средств РЗиА: реле различного назначения, цифровых блоков защит (контроллер АВР), переключателей — изделий, включающих в себя механическую коммутационную часть, микропроцессорный блок управления, а также панель индикации и управления.

В качестве измерительного органа для АВР в высоковольтных сетях служат реле минимального напряжения (реле контроля фаз), подключённые к защищаемым участкам через трансформаторы напряжения. В случае снижения напряжения на защищаемом участке электрической сети реле даёт сигнал в схему АВР. Однако, условие отсутствия напряжения не является достаточным для того, чтобы устройство АВР начало свою работу. Как правило, должен быть удовлетворён ещё ряд условий:
- На защищаемом участке нет неустранённого короткого замыкания. Так как понижение напряжения может быть связано с коротким замыканием, включение дополнительных источников питания в эту цепь нецелесообразно и недопустимо.
- Вводной выключатель включён. Это условие проверяется, чтобы АВР не сработало, когда напряжение исчезло из-за того, что вводной выключатель был отключён намеренно.
- На соседнем участке, от которого предполагается получать питание после действия АВР, напряжение присутствует. Если обе питающие линии находятся не под напряжением, то переключение не имеет смысла.
После проверки выполнения всех этих условий логическая часть АВР даёт сигнал на отключение вводного выключателя обесточенной части электрической сети и на включение межлинейного (или секционного) выключателя. Причём, межлинейный выключатель включается только после того, как вводной выключатель отключился. АВР подразделяется также на системы с восстановлением и без восстановления: при работе с восстановлением при возникновении напряжения на вводе с установленной выдержкой схема восстанавливает исходную конфигурацию. Обычно данный режим выбирается установкой накладок вторичных цепей в соответствующее положение. При восстановлении АВР допускается кратковременная работа питающих трансформаторов «в параллель» для бесперебойности электроснабжения.
В низковольтных сетях одновременно в качестве измерительного и пускового органа могут служить магнитные пускатели или модуль АВР-3/3. Либо предназначенный для управления схемами АВР микропроцессорный контроллер АВР.
Коммутационный аппарат переключения (переключатель питания) [ править | править код ]
Автоматический [ править | править код ]
![]()
![]()
Коммутационная аппаратура автоматического переключения — аппаратура автономного действия, состоящая из коммутационного аппарата (аппаратов) переключения и других устройств, необходимых для контроля цепей питания и переключения одной или нескольких цепей нагрузки от одного источника питания к другому. [5] :п. 2.1.2
Автоматические переключатели питания делятся на оборудование:
- постоянного тока;
- переменного тока
- использующие релейно-контакторные схемы;
- с непрерывной подачей питания при переключении нагрузок;
- источники бесперебойного питания. [7] :п.1
При автоматическом переключении обеспечивается гарантированное электропитание, когда допускается перерыв на время ввода в действие резервного источника. Бесперебойное электропитание с «мгновенным» вводом в действие резервного источника обеспечивает источник бесперебойного электропитания. [10]
Возможно использование автоматической коммутационной аппаратуры не только во время длительных отключений рабочего источника питания, но и при кратковременных провалах напряжения. Если допустимое время перерыва питания меньше 0,2 с возможно только использование источников бесперебойного питания, защита автоматическими выключателями цепи с коротким замыканием для уменьшения времени перерыва питания в таком случае невозможна или неэффективна. Если допустимое время более 0,2 с возможно использование защит электросети или использование источников бесперебойного питания. При допустимом времени 5…20 с возможно отказаться от источников бесперебойного питания и использовать автоматическую коммутационную аппаратуру. [11] :с. 61
Схема шагового двигателя
Схема управления шаговым двигателем. » Портал инженера
Эта схема является частью схемы опубликованной в журнале «РадиоХобби» №1 за 2001г. Стр. 44 в статье Юрия Сафонова из Киева «Система Дистанционного Управления для High — End УМЗЧ».
 |
На элементах микросхемы DD1.3, DD1.4. выполнен задающий генератор. Элементы C1 и R1 – времязадающие цепи генератора, обуславливают скорость вращения двигателя. Когда на одном из входов DD1.1 появится уровень «0» (команды «Вперед» и «Назад»), то на выходе этого элемента появится уровень «1», который разрешит работу задающего генератора, а через инвертор DD1.2 и работу дешифратора, что приведет к формированию ключами DD4, DD5 импульсов питающего напряжения двигателя.
 |
При отсутствии команды (уровня «0») на выводах «Вперед» и «Назад», питание на двигатель не подается. Направление вращения вала задает сигнал на выходе 10 реверсивного счетчика DD2. Концевые выключатели ставят по надобности.
 |
Двигатель подключается методом «научного втыка», потому, что скорее всего цветовая маркировка не совпадёт. Всё зависит от производителя конкретного двигателя. В первую очередь находим тестером в режиме омметра средние выводы шагового двигателя, соединив их вместе, подключаем к +12 вольтам схемы. Затем, схему управления шагового двигателя подключаем к блоку питания. Подключаем любой вход управления (вперед — назад) к общему проводу и по очереди оставшиеся выводы двигателя, получаем нормальное вращение. В качестве : DD1 — К561 ЛА7, DD2 — К561 ИЕ14, DD3 — К555 ИД7, DD4,DD5 — К155 ЛИ5.
Обсудить на форуме
Крутим шаговый двигатель — Как подключить — AVR project.ru
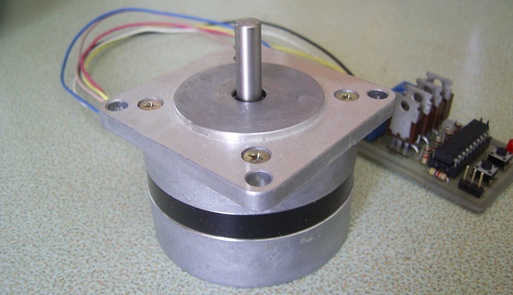
Шаговые двигатели достаточны распространены в устройствах, в которых необходимо добиться точного перемещения механизмов. Существует много типов шаговых двигателей, но самыми дружелюбными в плане управления являются 2-х фазные униполярные двигатели. Этот тип двигателей имеет две независимые обмотки с выводами от середины. Их можно встретить преимущественно в старой технике: принтерах, копирах, дисководах (5-и дюймовых) и еще много где.
В зависимости от от того как соединены средние обмотки внутри, из двигателя могут выходить 5 или 6 проводов. Разницы никакой нет, все равно средние выводы обмоток соединяются вместе. Характерной особенностью шаговых двигателей является дискретность поворота ротора, тоесть если взять и покрутить вал двигателя можно ощутить как он фиксируется в определенных моментах. Это и есть шаги двигателя. При запитывании одной из половины обмоток происходит фиксирование вала двигателя в определенном положении. Если снять напряжение с этой обмотки и запитать другую, ротор повернется и зафиксируется в другом положении. Таким образом, если запитывать обмотки в определенной последовательности можно добиться вращения вала двигателя.
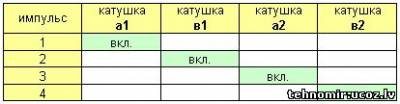
Существует несколько алгоритмов управления питанием обмоток двигателя. Самым простым является полношаговое управление, когда в любой момент времени запитана только одна из половинок обмоток. Для наглядности накидал табличку показывающую последовательность включения обмоток:
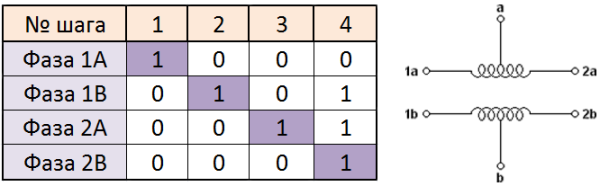
Ротор при таком управлении принимает естественное положение относительно статора. Есть еще способ управления шаговиком в полношаговом режиме, когда одновременно запитываются две фазы, таким образом удается увеличить момент на валу на 40%.
Главным недостатком полношагового управления являются аццкие вибрации двигателя и малая дискретность шага, равная паспортному значению.
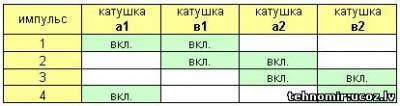
Для того чтобы уменьшить вибрации и добится более плавного и точного вращения вала существует более продвинутый способ — управление в полушаговом режиме, алгоритм включения половинок обмоток приведен ниже: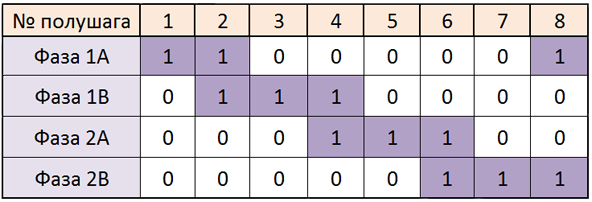
При такой работе вал двигателя за один цикл совершает половину шага и фиксируется между двумя естественными состояниями равновесия. Таким образом дискретность поворота вала увеличивается в 2 раза.
Есть еще способ увеличить дробленеи шага ротора двигателя — микрошаговое управление — когда обмотка не просто запитывается, а запитывается определенным током. И от отношения тока в соседних обмотках зависит положение ротора — чем больший ток течет в обмотке по отношению к соседней, тем ближе к ней смещается ротор и наоборот. Это позволяет увеличить дробление шага в десятки и сотни (!) раз.
С теорией немного разобрались, теперь нужно выбрать в каком режиме будет управляться двигатель. Полный шаг слишком убог и не эффективен, микрошаг сложен, да и нужен он в основном в управлении приводом высокоточного ЧПУ станка. Поэтому крутить будем в полушаге 🙂
Схема базируется на микроконтроллере attiny2313 и имеет две кнопки. При нажатии на одну вал двигателя будет крутиться в одну сторону, при нажатии другой — в другую. В качестве ключевых транзисторов выбраны КТ829, способные протащить через себя до 8 Ампер.
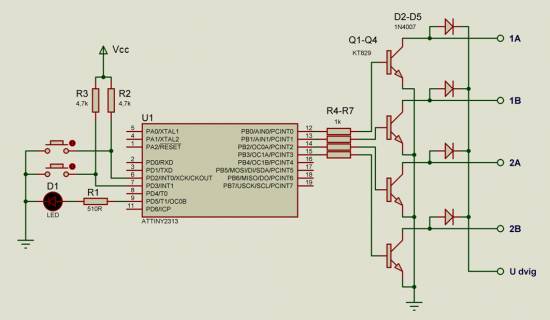 К клемме Udvig подключаются выводы от середин обмоток и туда же подводится напряжение для питания обмоток. Величина напряжения зависит от самого двигателя, для моего например по документации максимальный ток в обмотках 1,5 Ампера, измерив сопротивление обмоток получил 2 Ома, отсюда вывод что напряжение питания не должно превышать 3 В ну или немного больше, учитывая что запитываться будет индуктивная нагрузка. Кстати диоды D2-D5 стоят для того, чтобы гасить скачки обратного напряжения после закрытия транзистора. Иначе есть вероятность что ЭДС самоиндукции возникающая во время выключения питания обмотки пробъет транзистор.
К клемме Udvig подключаются выводы от середин обмоток и туда же подводится напряжение для питания обмоток. Величина напряжения зависит от самого двигателя, для моего например по документации максимальный ток в обмотках 1,5 Ампера, измерив сопротивление обмоток получил 2 Ома, отсюда вывод что напряжение питания не должно превышать 3 В ну или немного больше, учитывая что запитываться будет индуктивная нагрузка. Кстати диоды D2-D5 стоят для того, чтобы гасить скачки обратного напряжения после закрытия транзистора. Иначе есть вероятность что ЭДС самоиндукции возникающая во время выключения питания обмотки пробъет транзистор.
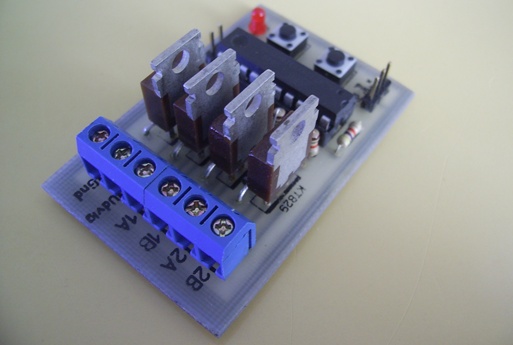
Плата управления в сборе:
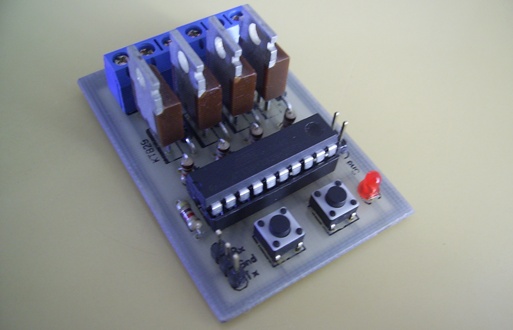
Красный светодиод загорается при нажатии одной из кнопок. Разъем подключения контроллера по UART сделал опционально, на случай если нужно будет приделать управление шаговиком с компа.
Код в Bascom-AVR:
$regfile = «2313def.dat»$crystal = 4000000
Dim S As Byte ‘эта переменная следит за номером шага двигателя
On Int0 Knopka1 ‘даем имена обработчикам внешних прерыванийOn Int1 Knopka2
Config Portb = Output ‘конфигурируем порт на выходConfig Portd.5 = Output ‘конфигурируем ногу для подключения светодиодаLed Alias Portd.5 ‘присваиваем имя LED выводу 5 порта D
‘прерывания будут генерироваться пока на ноге низкий уровень, то есть пока кнопка будет нажатаConfig Int0 = Low LevelConfig Int1 = Low Level
‘разрешаем прерыванияEnable InterruptsEnable Int0Enable Int1
‘основной цикл программы, просто ждем прерыванияDo
Knopka1: ‘обработчик прерывания первой кнопки
Led = 1 ‘зажигаем светодиод
Incr S ‘увеличим номер шага
If S = 9 Then ‘максимально возможный номер шага = 8 S = 1 End If
Select Case S ‘выбираем какие обмотки включать в зависимости от номера шага
Case 1 : Portb = &B00000001Case 2 : Portb = &B00000011Case 3 : Portb = &B00000010Case 4 : Portb = &B00000110Case 5 : Portb = &B00000100Case 6 : Portb = &B00001100Case 7 : Portb = &B00001000Case 8 : Portb = &B00001001
Waitus 1000 ‘задержка между шагами
Led = 0 ‘гасим светодиод
Knopka2: ‘обработчик прерывания второй кнопки
Led = 1 ‘зажигаем светодиод
Decr S ‘тут все тоже самое, только в обратном направлении
If S = 0 Then ‘минимально возможный номер шага = 1 S = 8 End If
Case 1 : Portb = &B00000001Case 2 : Portb = &B00000011Case 3 : Portb = &B00000010Case 4 : Portb = &B00000110Case 5 : Portb = &B00000100Case 6 : Portb = &B00001100Case 7 : Portb = &B00001000Case 8 : Portb = &B00001001
Led = 0 ‘гасим светодиод
Изменяя величину задержки между шагами, можно в больших пределах регулировать скорость вращения вала. При выбранной мной задержке в 1000 мкс с шаговиком имеющем 200 шагов на оборот (400 полушагов) скорость вращения получается примерно 2,5 оборота в секунду.
Скачать файлы к проекту
UPD: Здесь допилил программу, теперь стало возможным управление шаговым двигателем с компьютера.
Управление шаговым двигателем — СХЕМЫ — Каталог статей
Как работает шаговый двигатель?
Шаговые двигатели отличаются от регулируемых двигателей постоянного тока. Вместо того чтобы вращаться как двигатели постоянного тока, шаговый двигатель совершает дискретное вращение под воздействием серии импульсов. В нашем примере двигателю необходимо 48 импульсов чтобы совершить полный оборот в 360 градусов.
Другое преимущество шаговых двигателей — то, что их скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное.
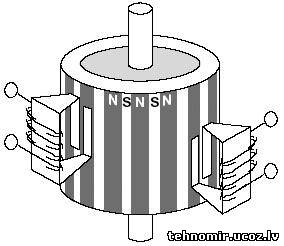
Шаговый двигатель состоит из ротора — постоянного магнита, который вращается внутри, и статор — четыре катушки (север, восток, юг, запад), которые являются частью корпуса и не перемещаются. Ротор совершает вращение посредством последовательных импульсов напряжение постоянного тока подаваемого к одной или двум катушкам одновременно.
Устройство Шагового двигателя.
Чтобы управлять шаговым двигателем необходим контроллер. Контроллер — схема, которая подает напряжение к любой из четырех катушек статора. Устройство может быть построено с использованием интегральной микросхемы типа ULN2003 (отечественный аналог К1109КТ22) состоящая из набора мощных составных ключей с защитными диодами на выходе. Наличие защитных диодов позволяет подключать индуктивные нагрузки без дополнительной защиты от выбросов обратного напряжения.
Подключения шагового двигателя.
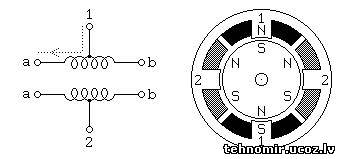
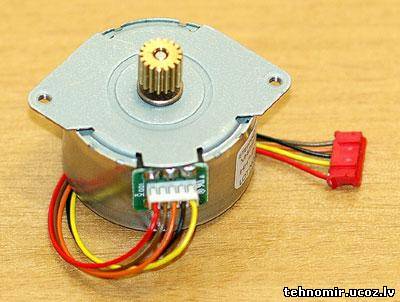
Однополярный двигатель должен иметь пять или шесть контактов в зависимости от модели. Если двигатель имеет шесть контактов то необходимо соединить выводы 1 и 2 (красный) вместе и подключить их к плюсу 12-24V напряжения питание. Оставшиеся выводы a1 (желтый), b1 (черный), a2 (оранжевый), b2 (коричневый) подключить к контроллеру согласно схеме.
Есть несколько способов, которые вы можете использовать, чтобы управлять шаговым двигателем.
1. Одиночные импульсы — самый простой способ. Одновременно подключается только одна катушка. Необходимо 48 пульсов чтобы ротор совершил один полный оборот. Каждый пульс перемещает ротор на 7,5 градусов.
2. Двойной импульс — одновременное подключение двух соседних катушек. В этом случае также необходимо 48 пульсов чтобы ротор совершил один полный оборот. Каждый пульс перемещает ротор на 7,5 градусов.
 3. Комбинированные импульсы — чередование первого и второго способа. Двигатель нуждается в 96 пульсах, чтобы совершить один оборот. Каждый пульс перемещает ротор приблизительно на 3,75 градуса.
3. Комбинированные импульсы — чередование первого и второго способа. Двигатель нуждается в 96 пульсах, чтобы совершить один оборот. Каждый пульс перемещает ротор приблизительно на 3,75 градуса.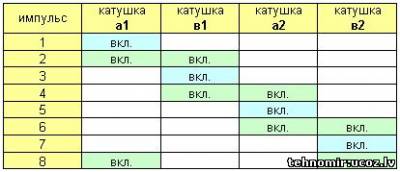
Программное обеспечение контроллера шагового двигателя.
Для управления работой шагового двигателя используем компьютер и программу. При использовании компьютера вы будете в состоянии сделать намного больше с вашим шаговым двигателем и наиболее важно — визуализировать, как ток течет через катушки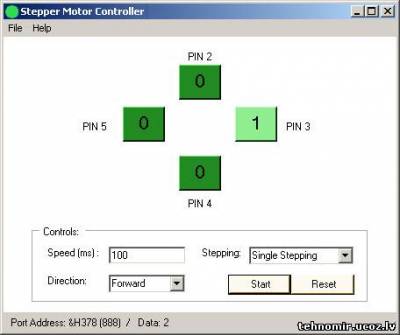 В программе понятный графический интерфейс, который позволяет точно управлять скоростью двигателя и направлением вращения в реальном времени, а также позволяет выбирать способы управления. Программа работает с версией Windows (98/ME/2000/XP). и скачать ее можно тут
В программе понятный графический интерфейс, который позволяет точно управлять скоростью двигателя и направлением вращения в реальном времени, а также позволяет выбирать способы управления. Программа работает с версией Windows (98/ME/2000/XP). и скачать ее можно тут