
Комплектные шаговые приводы
Комплектные шаговые приводы
В данном разделе приведены наиболее популярные комплекты шаговых приводов.
Шаговый двигатель, блок управления (драйвер и/или контроллер), а также источник питания подбираются исходя из требований к необходимому крутящему моменту привода, диапазону рабочих скоростей вращения, точности позиционирования, внешних ограничений по частотам управляющих сигналов, и т.д.
Обратитесь в нашу компанию, и наши специалисты помогут Вам подобрать лучшее техническое решение вашей задачи, а также сделают Вам самое интересное предложение по ценам на оборудование.

Шаговый привод для 4-х осевого станка с ЧПУ — FL57STH56
Максимальный крутящий момент — 12 кг*см
Источник питания — 24..30 В (350 Вт)
Режим рабoты — микрoшаг (1/10 шага)
Функции морфинга и подавления резонанса

Шаговый привод для 4-х осевого станка с ЧПУ — FL57STH76
Максимальный крутящий момент — 19 кг*см
Источник питания — 24..30 В (350 Вт)
Режим рабoты — микрoшаг (1/10 шага)
Функции морфинга и подавления резонанса

Шаговый привод — FL86STH65
Максимальный крутящий момент — 34 кг*см
Источник питания — 48 В (350 Вт)
Режим — целый шаг, 1/2, 1/5 и 1/10 шага
Функции морфинга и подавления резонанса

Шаговый привод — FL86STH80
Максимальный крутящий момент — 46 кг*см
Источник питания — 48 В (350 Вт)
Режим — целый шаг, 1/2, 1/5 и 1/10 шага
Функции морфинга и подавления резонанса

Шаговый привод — FL110STH99
Максимальный крутящий момент — 114 кг*см
Источник питания — 48 В (350 Вт)
Режим работы — микрошаг (1/10 шага)
Функции морфинга и подавления резонанса

Шаговый привод — FL130BYG2503
Максимальный крутящий момент — 500 кг*см
Питание — сеть 220В (АС)
Режимы работы — микрошаг до 1/512
Функции подавления резонанса и вибраций
Купить шаговый привод в нашей компании можно, сделав заказ через «Корзину товаров» либо позвонив нам по любому из телефонов, которые указаны у нас на сайте. Также Вы можете написать нам письмо на электронный адрес отдела продаж — sales@npoatom.ru.
Тел: +7 (812) 716-28-88
Факс: +7 (812) 622-05-40
«Первый шаг» шагового двигателя
Шаговый двигатель является традиционным исполнительным устройством многих электронных приборов и систем. Автор не только знакомит нас с устройством и принципами работы шагового двигателя, но и предлагает несложное устройство, состоящее из PIC процессора и драйвера, которое реализует различные режимы его работы.
Шаговый двигатель (далее ШД) представляет собой бесколлекторный двигатель постоянного тока с фиксированными положениями вала. ШД предназначен в первую очередь для точного позиционирования вала без применения систем обратной связи. ШД широко применяются в автомобилях, бытовой радиоаппаратуре, компьютерах. На производстве основное место использования ШД – это автоматизированное технологическое оборудование.
Для получения общего представления о теории ШД и проверки этой теории на практике достаточно небольшого объёма информации – в пределах этой статьи. Однако, как и в любой предметной области, знаний для профессионального освоения предмета требуется намного больше.
Шаговый двигатель, в общем случае, – это двигатель, имеющий ротор, статор и несколько обмоток. Вал ШД совершает поворот на фиксированный угол (шаг) при кратковременной подаче напряжения на обмотки в правильной последовательности. Обычно обмоток 2 или 4. Для того чтобы заставить ШД вращаться, необходимо поочерёдно подавать рабочее напряжение на обмотки двигателя в нужной полярности. Для ШД с двумя обмотками (биполярного ШД) необходимо менять очерёдность и полярность подаваемых импульсов. ШД с 4 обмотками (униполярный ШД) проще в управлении – для вращения вала достаточно поочерёдно подавать напряжение на каждую из четырёх обмоток. Вал двигателя при этом будет каждый раз поворачиваться на фиксированный шаг. Величина этого шага обусловлена конструкцией двигателя и составляет обычно единицы градусов. Как правило, чем меньше шаг двигателя, тем он дороже. Для формирования требуемой последовательности импульсов применяются микроконтроллеры в связке с силовыми элементами – драйверами. В простейшем случае драйвер представляет собой транзисторный ключ. Также выпускаются специализированные драйверы в интегральном исполнении, рассчитанные на разную мощность и более сложные алгоритмы управления, например, с использованием обратной связи.
Для нашего примера используем ШД привода головки записи-чтения от 5,25″ флоппи-дисковода TEAC.
Это униполярный двигатель с 5 выводами: 4 обмотки и общий провод подачи питания 12 В. ШД имеет шаг 1,8 градуса. Соответственно, для того чтобы вал совершил полный оборот, необходимо подать 200 импульсов. Для нашего эксперимента не подойдет ШД от современного 3,5″ дисковода. Там применяются биполярные двигатели, которые требуют более сложной схемы драйвера. Кроме того, качество исполнения ШД от трёхдюймового дисковода заметно ниже. Для небольших униполярных двигателей от CD-привода, принтера или флоппи-дисковода в качестве драйвера можно применить микросхему ULN2003A (рис. 1). Это набор транзисторов по схеме Дарлингтона с открытым коллектором и защитным диодом в цепи нагрузки (рис. 2). Микросхема содержит в себе 7 каналов коммутации с током нагрузки до 0,5 А. В качестве микроконтроллера может использоваться любой 8- или 16-разрядный процессор. В экспериментальной схеме (рис. 3) мы применяем процессор PIC16F84 от Microchip, однако провести эксперимент с использованием данной программы можно практически на любом процессоре семейства PIC12…PIC18.
Программа 1 (Stepper1.asm) реализует вращение вала двигателя с заданной скоростью в одном направлении. Используется так называемый «полношаговый режим». Диаграмма подачи импульсов на обмотки приведена на рис. 4. Это простейший способ управления ШД со всеми присущему ему недостатками: повышенная шумность, колебания вала при перемещении от шага к шагу, особенно заметные при наличии массивной нагрузки на валу, малое количество шагов на оборот. В реальных системах используются более сложные алгоритмы управления ШД. Это режимы плавного разгона, микрошага, использование обратной связи по току и другие. В программе 2 (Stepper2.asm) реализован «полушаговый» режим управления. Здесь двигатель совершает в два раза больше шагов на оборот, т.е. теперь вал занимает и промежуточные положения между фиксированными углами поворота в 1,8 градуса. Это достигается одновременной подачей напряжения на две соседние обмотки на чётных шагах (рис. 5). Полушаговый режим повышает плавность хода и снижает шум двигателя. Всего программой подаётся 200 импульсов на обмотки двигателя, при этом вал поворачивается на угол 180 градусов. Затем следует пауза в 2 секунды и происходит поворот на тот же угол, но в противоположном направлении. Далее цикл повторяется. Программа хорошо закомментирована и достаточно «прозрачна». Изменением констант вы сможете задать другие углы поворота и скорость вращения вала. Следует учитывать, что предельная скорость вращения ограничена конструкцией используемого ШД и не превышает 150…200 оборотов в минуту в зависимости от режима управления. Более сложные алгоритмы управления выходят за рамки данной статьи.
Статья Олега Пушкарёва с сайта журнала «СОВРЕМЕННАЯ ЭЛЕКТРОНИКА» приведена с сокращениями.
Подпишитесь на наши новости
Получайте первыми актуальную информацию от ООО «Электропривод»
ОБОРУДОВАНИЕ
ТЕХНОЛОГИИ
РАЗРАБОТКИ
Блог технической поддержки моих разработок
Урок 33. Биполярный шаговый двигатель в системе Ардуино.

С помощью драйвера L298N подключим к плате Ардуино биполярный шаговый двигатель. Для управления будем использовать программы из предыдущих уроков для униполярных двигателей.
Использование шаговых двигателей в биполярном режиме дает:
- Повышение крутящего момента примерно на 40% по сравнению с униполярным двигателем.
- Позволяет применять двигатели с любой конфигурацией фазных обмоток.
Недостаток биполярного режима – более сложный драйвер.
Драйвер биполярного шагового двигателя.
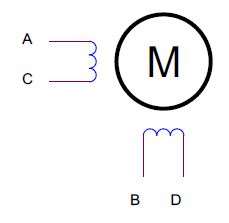
У биполярного шагового двигателя две обмотки, по одной для каждой фазы.
Если для управления униполярным двигателем достаточно 4 ключей, замыкающих выводы на землю, то биполярный привод требует более сложной коммутации обмоток. Необходимо каждую обмотку:
- подключать к источнику питания в прямой полярности;
- отключать;
- подключать к источнику в противоположной полярности.
Такую коммутацию может обеспечить мостовая схема с четырьмя ключами.
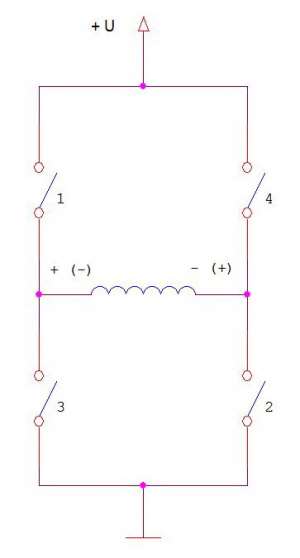
При замыкании ключей 1 и 2 на обмотку подается напряжение питания в прямом направлении. Замыкание ключей 3 и 4 подключает источник питания в обратной полярности.
Драйвер биполярного шагового двигателя намного сложнее, чем драйвер униполярного привода.
- Требуется 4 ключа на обмотку, т.е. 8 ключей на двигатель.
- Необходимы сложные схемы управления верхними ключами (ключи 1, 4) от логических сигналов микроконтроллера, “привязанных” к земле.
- Существуют проблема сквозных токов. Они возникают при одновременном включении транзисторов из одного плеча (ключей 1,3 или 2,4). Это может привести к замыканию источника питания и выгоранию ключей.
- Сквозные токи могут появляться из-за неодинакового быстродействия верхних и нижних ключей. Например, верхний ключ уже открылся, а нижний не успел закрыться.
Поэтому реализовать схему мощного драйвера биполярного шагового двигателя с использованием дискретных элементов достаточно сложно. Гораздо практичнее, удобнее, дешевле использовать интегральный драйвер.
Драйвер биполярного шагового двигателя L298N.
Микросхема L298, наверное, самый распространенный биполярный драйвер.
Это полный мостовой драйвер, позволяющий управлять биполярными нагрузками с током до 2 А и максимальным напряжением 46 В. Подробное описание микросхемы L298N можно посмотреть по этой ссылке.
На базе микросхемы L298N разработан модуль L298N.

Конструктивно он выполнен на одной плате размерами 43 x 43 мм. На плате установлены:
- микросхема L298N с радиатором охлаждения;
- клеммные колодки для подключения питания и нагрузки;
- разъем для подключения управляющих сигналов;
- стабилизатор напряжения 5 В;
- защитные диоды.

Принципиальная схема модуля L298N.
Микросхема L298N включена по стандартной схеме.
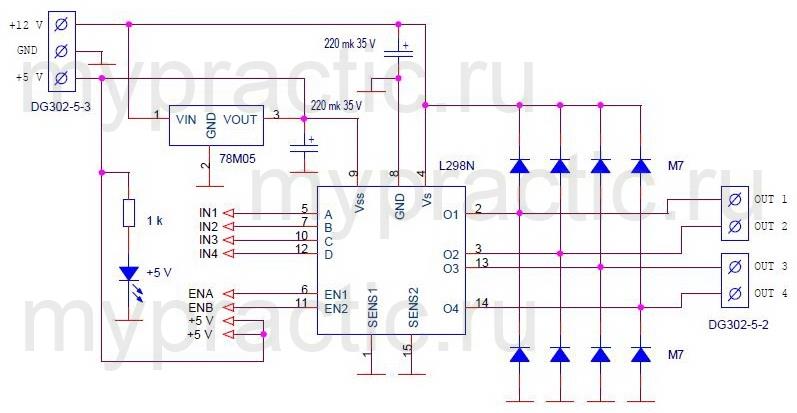
Диоды защищают ключи от выбросов при коммутации обмоток. Через них происходит разряд энергии запасенной в индуктивности обмоток.
Модуль содержит стабилизатор напряжения + 5 В для питания логической части микросхемы. Напряжение +5 В формируется из напряжения питания двигателя. На клеммной колодке оно обозначено +12 V, но может меняться в широких пределах 8 … 46 В.
Управления полумостами происходит от входных сигналов IN1, …, IN4. Уровни сигналов 0 / 5 В. При низком уровне выход подключается к земле, при высоком – к источнику питания двигателя (+12 V).
Предельно-допустимый ток фазы 2 А. Защиты по току в модуле нет. Но реализация токовой защиты значительно усложняет схему, а короткое замыкание обмоток двигателя событие маловероятное. Я с таким не встречался. К тому же механическое блокирование вала шагового привода не вызывает перегрузки по току.
Это все очень коротко. Подробно можно посмотреть в этой статье.
| По моей партнерской ссылке цена модуля L298N составляет всего 200 руб. (на ноябрь 2016 г.). В то время как одна микросхема L298N в Ростове стоит 250 руб. Гораздо дешевле купить модуль, чем собирать драйвер на отдельных компонентах, не говоря о времени и разработке печатной платы. Перейти в магазин >> |
Подключение биполярного двигателя к плате Ардуино.
Я подключил к плате привод FL42STH47-1684. Это биполярный шаговый двигатель с 4 выводами, током фазы 1,68 А и сопротивлением обмоток 1, 65 Ом.

Источник питания у меня напряжением 12 В. Если двигатель подключить непосредственно через ключи, то ток в обмотках будет 12 В / 1,65 А = 7 А. Двигатель просто сгорит. Поэтому я последовательно с каждой обмоткой включил ограничительные резисторы. Схема выглядит так.

Я использовал резисторы сопротивлением 10 Ом. Ток фазы можно рассчитать по формуле:
Iфазы = ( Uпитания – Uключей ) / ( Rограничительный + Rобмотки)
- Iфазы – ток фазы.
- Uпитания – напряжение источника питания, у меня 12 В.
- Uключей – падение напряжения на открытых ключах драйвера. Для L298 это сумма падений на верхнем (Source Saturation Voltage) и нижнем ключах (Sink Saturation Voltage). Из справочных данных определяем, что на ключах драйвера L298N падает 2-2,5 В.
- Rограничительный – сопротивление ограничительных резисторов. В моей схеме 10 Ом.
- Rобмотки – сопротивление обмоток двигателя. У двигателя FL42STH47-1684 сопротивление 1,65 Ом.
В результате для моей схемы ток фазы будет:
Iфазы = (12 – 2) / (10 + 1,65) = 0,86 А.
На ограничительных резисторах может выделяться значительная мощность. В моей схеме 0,86 * 0,86 * 10 = 7,4 Вт. Я использовал резисторы мощностью 10 Вт.
Можно подключить двигатель без ограничительных резисторов, снизив напряжение источника питания. Но в схеме с резисторами привод будет вращаться с большей скоростью благодаря тому, что токи фаз нарастают быстрее.
Что касается подключения разных вариантов биполярных двигателей, то они подробно описаны в этой статье. Я просто перечислю их и покажу схемы вариантов.
Двигатель с 4 выводами.
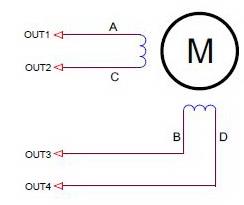
Самая распространенная схема.
Двигатель с 6 выводами.
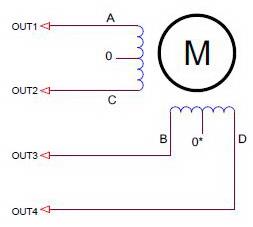
Надо помнить, что сопротивление обмоток складываются и для того чтобы обеспечить тот же ток фазы, как для униполярного режима надо удвоить напряжение питания драйвера.
Двигатель с 8 выводами, последовательное соединение обмоток.
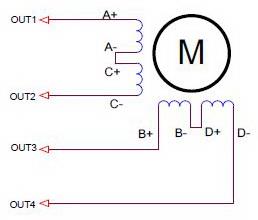
Сопротивления обмоток складываются, и требуется в два раза большее напряжение питания.
Двигатель с 8 выводами, параллельное соединение обмоток.
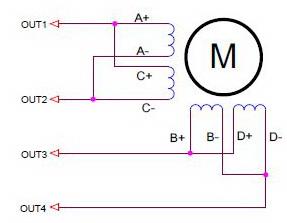
Обмотки включены параллельно. Общее сопротивление в два раза меньше, ток, при том же напряжении питания, в два раза больше ток драйвера. Зато снижается общая индуктивность, а значит, повышается скорость нарастания тока в обмотках.
Проверка работы схемы.
Мой вариант схемы в собранном виде выглядит так.

В этом уроке программы писать не будем. Все программы из уроков 28, 29, 31, 32 должны работать без изменений. Только обратите внимание на последовательность подключения управляющих сигналов модуля L298N к выводам платы Ардуино. Выводы фаз A,B,C,D для униполярного двигателя соответствуют управляющим выводам IN1, IN3, IN2, IN4 модуля L298N.
Сначала я загрузил в плату Ардуино программу драйвера с управлением от компьютера по протоколу AT команд и проверил работу с программой верхнего уровня StepMotor. Резидентную программу (для платы Ардуино) и программу верхнего уровня (для компьютера) можно взять из урока 31.
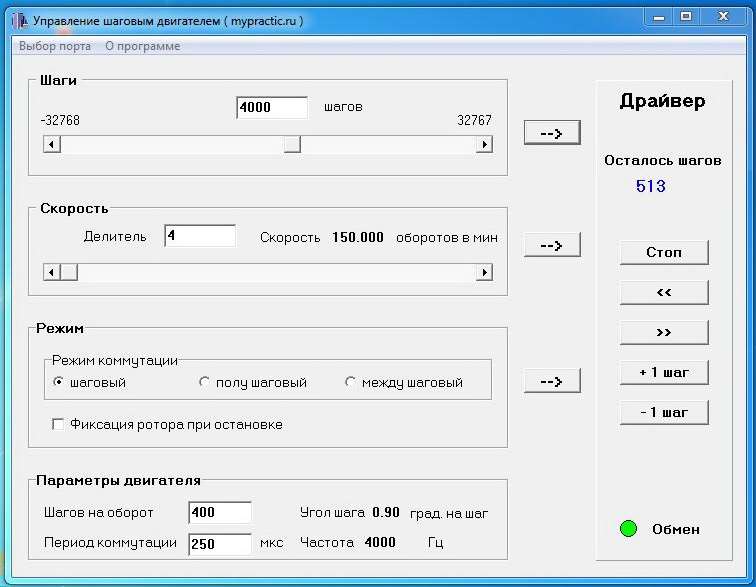
Все работает. Скорость вращения моего привода, включенного по такой схеме, достигает 150 оборотов в минуту. Униполярный двигатель FL57STH76-1006 в предыдущих уроках вращался со скоростью не более 60 оборотов в минуту. Увеличение скорости вращения двигателя в 2,5 раза связано, прежде всего, с большей скоростью нарастания токов в обмотках. Происходит это из-за меньшей индуктивности обмоток и применения схемы с ограничительными резисторами. Для убедительности я рассчитаю скорость нарастания тока для обоих приводов.
Для двигателя из предыдущих уроков (FL57STH76-1006):
- индуктивность обмотки 14 мГн;
- при питании 12В ток в обмотке достигает значения 1 А за время
T = I * L / U = 1 А * 14 мГн / 12 В = 1,2 мс.
Для двигателя, который я использовал в этом уроке (FL42STH47-1684):
- индуктивность обмотки 3,2 мГн;
- при питании 12В ток в обмотке достигает значения 1 А за время
T = I * L / U = 1 А * 3,2 мГн / 12 В = 0,3 мс.
Отсюда и увеличение скорости вращения. Конечно, повлияло еще:
- увеличение крутящего момента из-за биполярного режима коммутации;
- другой момент инерции ротора;
- меньший ток фазы;
- значительно влияет число шагов двигателя на оборот, но у меня этот параметр одинаков для обоих приводов.
Но если ток не успевает нарастать до нужного значения за время включения фазы, то все остальное уже не так важно.
Дальше я проверил работу следящего электропривода с новым двигателем. Резидентная программа платы Ардуино осталась прежней. А для управления от компьютера я использовал программу Tracker из урока 32.
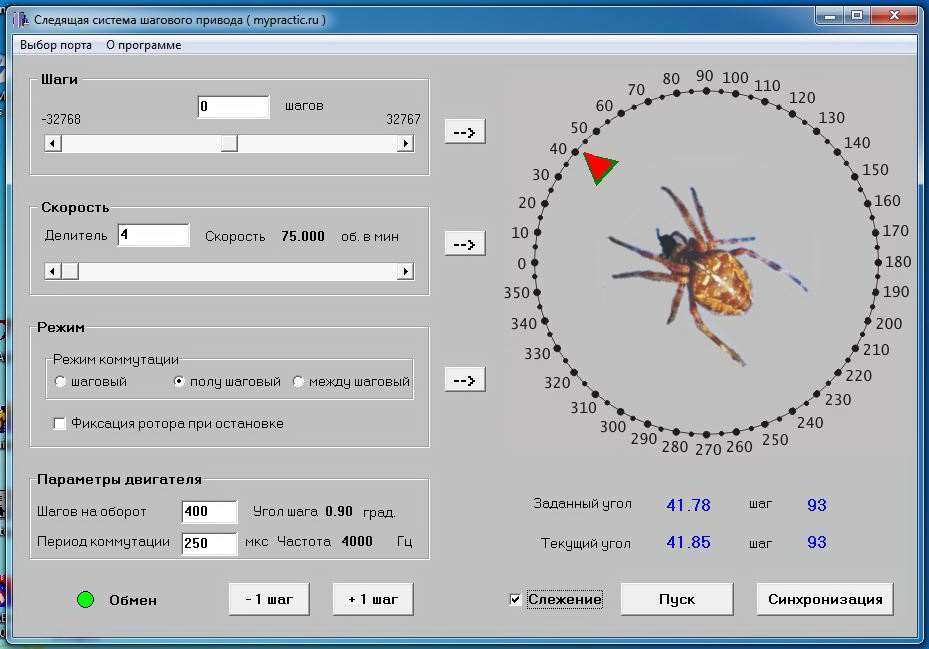
Следящая система стала работать на много быстрее. Я снял короткий ролик работы следящего электропривода в шаговом и полу шаговом режимах.
Вал двигателя следует за указателем на мониторе компьютера явно быстрее.
В этом уроке я постарался не только рассказать, как работать с униполярными шаговыми двигателями, но и показать влияние скорости нарастания тока в фазных обмотках, на скорость вращения двигателя.
В следующем уроке я расскажу, как работать со STEP/DIR драйверами шаговых двигателей. Представлю библиотеку для управления такими устройствами.
Сервопривод
![]()
![]()
Сервопри́вод (от лат. servus — слуга, помощник, раб), или следя́щий при́вод — механический привод с автоматической коррекцией состояния через внутреннюю отрицательную обратную связь, в соответствии с параметрами, заданными извне.
Содержание
- 1 Описание
- 2 Состав сервопривода
- 3 Сравнение с шаговым двигателем
- 4 Виды сервопривода
- 5 Применение
- 5.1 Серводвигатель
- 6 См. также
- 7 Ссылки
Описание [ править | править код ]
Сервоприводом является любой тип механического привода (устройства, рабочего органа), имеющий в составе датчик (положения, скорости, усилия и т. п.) и блок управления приводом (электронную схему или механическую систему тяг), автоматически поддерживающий необходимые параметры на датчике (и, соответственно, на устройстве) согласно заданному внешнему значению (положению ручки управления или численному значению от других систем).
Проще говоря, сервопривод является «автоматическим точным исполнителем» — получая на вход значение управляющего параметра (в режиме реального времени), он «своими силами» (основываясь на показаниях датчика) стремится создать и поддерживать это значение на выходе исполнительного элемента.
К сервоприводам, как к категории приводов, относится множество различных регуляторов и усилителей с отрицательной обратной связью, например, гидро-, электро-, пневмоусилители ручного привода управляющих элементов (в частности, рулевое управление и тормозная система на тракторах и автомобилях), однако термин «сервопривод» чаще всего (и в данной статье) используется для обозначения электрического привода с обратной связью по положению, применяемого в автоматических системах для привода управляющих элементов и рабочих органов.
Сервоприводы в настоящее время применяются в высокопроизводительном оборудовании следующих отраслей: машиностроение; автоматические линии производства: напитков, упаковки, стройматериалов, электроники и т. д., подъемно-транспортная техника; полиграфия; деревообработка, пищевая промышленность. [ источник не указан 1452 дня ]
Состав сервопривода [ править | править код ]
- Привод — например, электромотор с редуктором, или пневмоцилиндр,
- Датчик обратной связи — например, датчик угла поворота выходного вала редуктора (энкодер),
- Блок питания и управления (он же преобразователь частоты / сервоусилитель / инвертор / servodrive).
- Вход/конвертер/датчик управляющего сигнала/воздействия (может быть в составе блока управления).
Простейший блок управления электрического сервопривода может быть построен на схеме сравнения значений датчика обратной связи и задаваемого значения, с подачей напряжения соответствующей полярности (через реле) на электродвигатель. Более сложные схемы (на микропроцессорах) могут учитывать инерцию приводимого элемента и реализовывать плавный разгон и торможение электродвигателем для уменьшения динамических нагрузок и более точного позиционирования (например, привод головок в современных жёстких дисках).
Для управления сервоприводами или группами сервоприводов можно использовать специальные ЧПУ-контроллеры, которые можно построить на базе программируемых логических контроллеров (ПЛК).
Мощность двигателей: от 0,05 до 15 кВт.
Крутящие моменты (номинальные): от 0,15 до 50 Н·м.
Сравнение с шаговым двигателем [ править | править код ]
Другим вариантом точного позиционирования приводимых элементов без датчика обратной связи является применение шагового двигателя. В этом случае схема управления отсчитывает необходимое количество импульсов (шагов) от положения репера (этой особенности обязан характерный шум шагового двигателя в дисководах 3,5″ и CD/DVD при попытках повторного чтения). При этом точное позиционирование обеспечивается параметрическими системами с отрицательной обратной связью, которые образуются взаимодействующими между собой соответствующими полюсами статора и ротора шагового двигателя. Cистема управления шаговым двигателем, активизирующая соответствующий полюс статора, формирует cигнал задания для соответствующей параметрической системы .
Так как датчик обычно контролирует приводимый элемент, электрический сервопривод имеет следующие преимущества перед шаговым двигателем:
- не предъявляет особых требований к электродвигателю и редуктору — они могут быть практически любого нужного типа и мощности (а шаговые двигатели, как правило, маломощны и тихоходны);
- гарантирует максимальную точность, автоматически компенсируя:
- механические (люфты в приводе) или электронные сбои привода;
- постепенный износ привода, шаговому же двигателю для этого требуется периодическая юстировка;
- тепловое расширение привода (при работе или сезонное), это было одной из причин перехода на сервопривод для позиционирования головок в жестких дисках;
- обеспечивая немедленное выявление отказа (выхода из строя) привода (по механической части или электронике);
- большая возможная скорость перемещения элемента (у шагового двигателя наименьшая максимальная скорость по сравнению с другими типами электродвигателей);
- затраты энергии пропорциональны сопротивлению элемента (на шаговый двигатель постоянно подаётся номинальное напряжение с запасом по возможной перегрузке);
Недостатки в сравнении с шаговым двигателем
- необходимость в дополнительном элементе — датчике;
- сложнее блок управления и логика его работы (требуется обработка результатов датчика и выбор управляющего воздействия, а в основе контроллера шагового двигателя — просто счётчик);
- проблема фиксирования: обычно решается постоянным притормаживанием перемещаемого элемента либо вала электродвигателя (что ведёт к потерям энергии) либо применение червячных/винтовых передач (усложнение конструкции) (в шаговом двигателе каждый шаг фиксируется самим двигателем).
- сервоприводы, как правило, дороже шаговых.
Сервопривод, однако, возможно использовать и на базе шагового двигателя или в дополнение к нему до некоторой степени совместив их достоинства и устранив конкуренцию между ними (сервопривод осуществляет грубое позиционирование в зону действия соответствующей параметрической системы шагового двигателя, а последняя осуществляет окончательное позиционирование при относительно большом моменте и фиксации положения).
Проблемы фиксирования никакой нет в сервоприводе в отличие от шагового. Высокоточное позиционирование и удержание в заданной позиции обеспечивается работой электрической машины в вентильном режиме, суть которого сводится к её работе в качестве источника силы. В зависимости от рассогласования положения (и других координат электропривода) формируется задание на силу. При этом несомненным преимуществом сервопривода является энергоэффективность: ток подается только в том необходимом для того объеме, чтобы удержать рабочий орган в заданном положении. В противоположность шаговому режиму, когда подается максимальное значение тока, определяющее угловую характеристику машины. Угловая характеристика машины аналогична при малых отклонениях механической пружине, которая пытается «притянуть» рабочий орган в нужную точку. В шаговом приводе чем больше рассогласование положения, тем больше сила при неизменном токе.
Виды сервопривода [ править | править код ]
1. Сервопривод вращательного движения
2. Сервопривод линейного движения
- Плоский
- Круглый
Синхронный сервопривод — позволяет точно задавать угол поворота (с точностью до угловых минут), скорость вращения, ускорение. Разгоняется быстрее асинхронного, но во много раз дороже.
Асинхронный сервопривод (Асинхронная машина с датчиком скорости) — позволяет точно задавать скорость, даже на низких оборотах.
Линейные двигатели — могут развивать огромные ускорения (до 70 м/с²).
3. По принципу действия
- Электромеханический
- Электрогидромеханический
У электромеханического сервопривода движение формируется электродвигателем и редуктором.
У электрогидромеханического сервопривода движение формируется системой поршень-цилиндр. У данных сервоприводов быстродействие на порядок выше в сравнении с электромеханическими.
Применение [ править | править код ]
Сервоприводы применяются для точного (по датчику) позиционирования (чаще всего) приводимого элемента в автоматических системах:
- управляющие элементы механической системы (заслонки, задвижки, углы поворота)
- рабочие органы и заготовки в станках и инструментах
Сервоприводы вращательного движения используются для:
Сервоприводы линейного движения используются, например, в автоматах установки электронных компонентов на печатную плату.
Серводвигатель [ править | править код ]

Серводвигатель — сервопривод с мотором, предназначенный для перемещения выходного вала в нужное положение (в соответствии с управляющим сигналом) и автоматического активного удержания этого положения.
Серводвигатели применяются для приведения в движение устройств управляемых поворотом вала — как открытие и закрытие клапанов, переключатели и так далее.
Важными характеристиками сервомотора являются динамика двигателя, равномерность движения, энергоэффективность.
Серводвигатели широко применяются в промышленности, например, в металлургии, в станках с ЧПУ, прессо-штамповочном оборудовании, автомобильной промышленности, тяговом подвижном составе железных дорог.
В основном в сервоприводах использовались 3-полюсные коллекторные двигатели, в которых тяжелый ротор с обмотками вращается внутри магнитов.
Первое усовершенствование, которое было применено — увеличение количества обмоток до 5. Таким образом, вырос вращающий момент и скорость разгона. Второе усовершенствование — это изменение конструкции мотора. Стальной сердечник с обмотками очень сложно раскрутить быстро. Поэтому конструкцию изменили — обмотки находятся снаружи магнитов и исключено вращение стального сердечника. Таким образом, уменьшился вес двигателя, уменьшилось время разгона и возросла стоимость.
Ну и наконец, третий шаг — применение бесколлекторных двигателей. У бесколлекторных двигателей выше КПД, так как нет щёток и скользящих контактов. Они более эффективны, обеспечивают большую мощность, скорость, ускорение, вращающий момент.

