Принцип действия двигателя постоянного тока
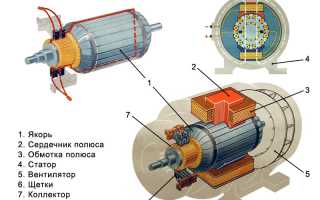
Принцип действия двигателя постоянного тока
Главной конструктивной и характерной принадлежностью машины постоянного тока, служит использование для присоединения к электрической сети коммутатора, предназначенного для преобразования величин постоянного тока в переменный ток. Коммутатор является непременным элементом любой машины этого типа ввиду того, что ее якорная обмотка двигателя подразумевает наличие переменного тока.
Особенности двигателя постоянного тока

Двигательные устройства постоянного тока отличаются широкими возможностями регулирования скорости вращения и обладают способностью сохранять во всем диапазоне регулирования высокий КПД, а также имеют в наличии механические характеристики, благодаря которым двигатели могут использоваться по специальному назначению, в соответствии с необходимыми требованиями.
Принцип работы
Функционально двигатель принадлежит к классу синхронных машин обращенного типа, это объясняется тем, что статор и ротор поменяли выполнение задач. Статор выполняет функции по возбуждению магнитного поля, ротор принял задачи направленные на преобразование энергии.
Во время вращения якоря в магнитном поле, производимым статором в витках обмотки, наводится ЭДС. Направление ее движения находится по правилу правой руки.
После того, как якорь и коллектор повернутся на 180 градусов виток меняет свои стороны, на противоположное направление меняется движение ЭДС.
Так происходит процесс индуцирования переменной электродвижущей силы, выпрямляемой посредством коллектора.
Коллектор, через щеточный механизм, соединен с обеими сторонами витка, в результате этого происходит снятие щетками текущего в неизменном направлении пульсирующего напряжения, это способствует наличию во внешней цепи, идущего в постоянном направлении, пульсирующего тока. Для того, чтобы снизить пульсацию в пазах якоря, прибавляют добавочное количество витков.
Конструкция двигателя
Двигатель, как и любая другая машина этого типа, содержит в своей конструкции статор, являющегося неподвижным элементом, и ротор (якорь) – вращающийся элемент машины, между ними находится воздушный зазор. В якоре двигателя происходит индуцирование ЭДС. Создание основного магнитного поля происходит при помощи главных полюсов, состоящих из сердечников и катушек возбуждения.
Равномерное распределение полученной магнитной индукции в области воздушного зазора обеспечивается полюсными наконечниками.
Чередование полярности полюсов во время движения электрического тока достигается за счет соединения катушек главных полюсов в обмотку возбуждения. Для улучшения коммутации предусмотрены добавочные полюса.
Уменьшение вихревых токов, которые появляются в результате перемагничивания якоря в процессе его вращения в созданном магнитном поле, происходит за счет конструкции сердечника, исполненного из пластин электротехнической стали, для большего эффекта он покрывается специальным лаком.
Контакт внешней цепи машины с коллектором осуществляется за счет щеток, основным материалом для них является графит.
Область применения
Несмотря на то, что себестоимость этого типа двигателя намного дороже асинхронных машин, их особенности могут сыграть решающую роль в узкоцелевом специальном назначении.
С помощью таких двигателей приводятся в работу прокатные станы, они используются для привода гребного винта на кораблях, а также для транспортных средств, имеющих систему питания на постоянном токе.
Поэтому их область использования характерна для нужд там, где необходима электрическая тяга, это: тепловозы, электровозы, электропоезда, городской транспорт, то есть там, где необходимо применить мягкие механические характеристики и широкие пределы регулировки количества оборотов вращения.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Обратный ЭДС двигателя постоянного тока
Вибху
Я не смог найти объяснение этому моему запросу. Почему обратная ЭДС в двигателе постоянного тока почти равна приложенному напряжению на холостом ходу? Я пытался искать в интернете, но все тщетно.
Спехро Пефхани
Вы можете думать о двигателе, который ведет себя как резистор, подключенный к генератору (последний соответствует обратной ЭДС). Это производит вращающий момент, который пропорционален току через резистор.
Чем выше разница между обратной ЭДС и входным напряжением, тем выше ток. Чем выше ток, тем выше крутящий момент.
Если двигатель остановлен, на резисторе появляется все входное напряжение, и возникает большой крутящий момент. Поскольку для преодоления потерь, таких как трение подшипников и обмотка, а также магнитных потерь, требуется лишь небольшой крутящий момент, при отсутствии нагрузки двигатель вращается до тех пор, пока противо-ЭДС почти не станет равной входному напряжению, а крутящий момент не уменьшится до тех пор, пока двигатель не заработает. больше не ускоряется значительно. Ток, полученный из оставшейся разности (умноженный на входное напряжение), дает вам энергопотребление без нагрузки. Разумеется, эффективность равна нулю без нагрузки, поскольку она генерирует нулевую выходную мощность на валу.
Потери в медных обмотках являются квадратом тока, умноженным на сопротивление (то есть сопротивление обмотки), или I 2 R » role=»presentation» style=»position: relative;»> я I 2 R » role=»presentation» style=»position: relative;»> I 2 R » role=»presentation» style=»position: relative;»> 2 I 2 R » role=»presentation» style=»position: relative;»> I 2 R » role=»presentation» style=»position: relative;»> р I 2 R » role=»presentation» style=»position: relative;»> I 2 R » role=»presentation» style=»position: relative;»> я I 2 R » role=»presentation» style=»position: relative;»> 2 I 2 R » role=»presentation» style=»position: relative;»> р потери.
Если обмотки имеют нулевое сопротивление, обратная ЭДС всегда будет равна входному напряжению (даже под нагрузкой), поскольку любая разница будет пропускать бесконечный ток, генерируя бесконечный крутящий момент.
Олин Латроп
Потому что электродвигатели довольно эффективны.
Когда мотор вращается, он действует как генератор. Когда оно вращается из-за приложенного напряжения, вращение генерирует внутреннее напряжение, которое противоположно тому, которое вы приложили. То, что поддерживает вращение двигателя, это разница приложенного напряжения минус эта внутренняя ЭДС.
Вот почему скорость двигателя без нагрузки саморегулируется как функция напряжения. Сначала двигатель не вращается, поэтому все приложенное напряжение идет на его вращение. По мере ускорения двигателя обратная ЭДС усиливается, поэтому для вращения двигателя остается все меньше и меньше напряжения. В конце концов, двигатель работает так быстро, что противо-ЭДС отменяет достаточное количество приложенного напряжения, чтобы оно продолжало вращаться только на этой скорости.
Чем эффективнее двигатель, тем ближе обратная ЭДС к приложенному напряжению. Поскольку двигатель теоретически не работает, ему не нужно напряжение, чтобы продолжать работать. Реальные двигатели имеют реальное трение и другие потери, поэтому всегда требуется некоторая конечная доля приложенного напряжения, чтобы оно вращалось даже без нагрузки.
Что происходит с эдс двигателя
Борис Калинин
+7 961 683-09-01

28.1. Управление скоростью двигателя постоянного тока
В электродвигателях постоянного тока крутящий момент порождается реакцией между двумя магнитными полями: одно поле устанавливается стационарной обмоткой возбуждения, а другое – обмотками во вращающемся якоре. У некоторых двигателей постоянного тока отсутствует обмотка возбуждения, вместо которой установлены большие постоянные магниты, сохраняющие стационарное магнитное поле постоянным при любых рабочих условиях.
В любом случае, принцип работы электродвигателя постоянного тока заключается в том, что ток, проходя через якорь, создает магнитное поле, пытающееся выровняться со стационарным полем. И поэтому якорь вращается:

Однако, коллектор (так называется набор сегментированных медных планок), разрывает электрический контакт с уже «выровненной» обмоткой и возбуждает другую обмотку (или как в простом примере, показанном выше, перевозбуждает ту же цепь в противоположном направлении), создавая другое не выровненное магнитное поле, которое продолжает вращать якорь. Электрический контакт между вращающимися сегментами коллектора и стационарным источником питания происходит через угольные щетки. Эти щетки изнашиваются через определенное время (как и сам коллектор) и поэтому требуют периодической замены.
Большинство промышленных электродвигателей постоянного тока изготавливаются с несколькими обмотками якоря, а не с одной, как показано на упрощенной иллюстрации сверху. Фотография большого (1250 л. с.) электромотора постоянного тока, используемого для приведения в движение парома, с обмотками и якорем показана здесь:


В электродвигателях постоянного тока проявляются следующие отношения между механическими и электрическими величинами:
Крутящий момент:
- Момент прямо пропорционален силе магнитного поля якоря, которая, в свою очередь, прямо пропорциональна току, проходящему через обмотки якоря;
- Момент также прямо пропорционален силе постоянного магнитного поля, которое, в свою очередь, прямо пропорционально току, проходящему через возбуждающую обмотку (в двигателе без магнитов).
Скорость:
- Скорость ограничена ЭДС, генерируемой якорем при вращении в постоянном магнитном поле. Эта ЭДС прямо пропорциональна скорости вращения якоря, и также прямо пропорциональна силе постоянного магнитного поля (которая прямо пропорциональна току возбуждающей обмотки в электродвигателе без магнитов);
- Следовательно, скорость прямо пропорциональна напряжению якоря;
- Также скорость обратно пропорциональна силе постоянного магнитного поля, которая прямо пропорциональна току, проходящему через возбуждающие обмотки (в двигателе без магнитов).
Очень простой способ управления скоростью и моментом двухобмоточного двигателя постоянного тока заключается в управлении величиной тока, проходящего через возбуждающую обмотку:

Уменьшающееся сопротивление токозадающего резистора, позволяет большему току протекать через возбуждающую обмотку, усиливая ее магнитное поле. Это окажет два эффекта на работу двигателя: во-первых, двигатель будет производить больший момент, чем был до этого (при той же величине тока якоря), так как более сильное магнитное поле якоря будет воздействовать на якорь; во-вторых, скорость двигателя уменьшится, так как большая противо-ЭДС будет генерироваться вращающимся якорем при той же скорости вращения, и эта противо-ЭДС естественно попытается сравняться с приложенным напряжением источника постоянного тока. С другой стороны, мы можем увеличить скорость электродвигателя постоянного тока (и уменьшить выходной момент) увеличением сопротивления управляющего резистора, ослабляя стационарное магнитное поле, которое вращает якорь.
Регулированием тока обмотки можно менять баланс между скоростью и моментом, но этого недостаточно для управления общей мощностью двигателя. Чтобы управлять выходной мощностью электродвигателя постоянного тока мы также должны управлять напряжением и током якоря. Переменные резисторы можно применить и для этой задачи, но этот метод не используется в настоящее время, так как приводит к потере мощности.
Лучшим решением будет применение электронной схемы регулирования мощности на транзисторных ключах быстро отключающих и включающих якорь двигателя в цепь. Такой тип управления называется широтно-импульсной модуляцией, или ШИМ.


Такая электронная схема регулирования мощности обычно называется приводом. Таким образом, привод с регулируемой скоростью (или VSD ) – это высокомощная схема, используемая для управления скоростью двигателя постоянного тока. Моторные приводы могут быть вручную настроены на пуск двигателя с заданной скоростью, или могут принимать электронные управляющие сигналы для изменения скорости двигателя таким же образом как электронные сигналы управляют движением регулирующего клапана. Оснащенный дистанционной системой передачи управляющих сигналов, привод функционирует подобно любому другому конечному исполнительному элементу: следуя командам контроллера, стабилизирует некий технологический параметр, приближая его к уставке.
По традиционной технологии для импульсного питания двигателя постоянного тока используют схему управляемого выпрямителя, в котором для преобразования переменного тока в постоянный вместо обычных выпрямляющих диодов используют тиристоры. Основным источником питания промышленных двигателей постоянного тока остается переменный ток, и этот переменный ток должен быть преобразован в постоянный в некотором узле системы; управление имеет смысл интегрировать прямо в этот выпрямительный узел:

Схема управляемого выпрямителя работает по принципу изменения времени «пускового» импульса относительно импульсов колебаний переменного тока. Чем раньше в каждом периоде переменного тока откроется тиристор, тем дольше он будет пропускать ток к двигателю. Схема фазового управления отвечает за генерацию импульсов и их длительность.
Привод постоянного тока просто регулирующий мощность, поступающую к двигателю, был бы непродуманным и трудно применимым для управления большинством процессов. Чего бы в идеале хотелось от регулируемого привода, так это точного управления скоростью двигателя. По этой причине большинство приводов рассчитано на получение обратной связи от тахометра, механически соединенного с валом мотора. Тахометр обычно представляет собой небольшой генератор, создающий постоянное напряжение, прямо пропорциональное скорости вращения вала (с выходом 0-10 В). По его показаниям регулируемый привод дросселирует электрическую мощность, подводимую к двигателю так, чтобы скорость вращения совпала с заданной управляющим сигналом. Имея встроенный контур обратной связи для регулирования скорости, регулируемый привод становится «ведомым контроллером» в системе управления. Привод может принимать выходной сигнал уставки скорости от любого контроллера:
Принцип действия машины постоянного тока

Хотя в современном электроприводе преобладают машины переменного тока (асинхронные электродвигатели), двигатели постоянного тока все еще используют и не только в предыдущих решениях.
Устройство простейшего электродвигателя постоянного тока
На рисунке ниже приведена простейшая машина постоянного тока:
Схематическое отображение электродвигателя постоянного тока в осевом направлении показано ниже:
Неподвижная часть двигателя постоянного тока называется индуктором или статором. Состоит он из полюсов и круглого стального ярма, к которому крепятся полюса. Главным назначением индуктора является генерация постоянного (основного) магнитного потока машины. Индуктор простейшей машины, отображенный выше, имеет два полюса 1 (ярмо индуктора не показано).
Вращающаяся часть машины состоит из цилиндрического якоря 2, укрепленного на валу, и коллектора 3. Якорь состоит из набранного из листов электротехнической стали сердечника и обмотки, укрепленной на сердечника якоря. Обмотка якоря в показанном на рисунке простейшем двигателе имеет один виток. Концы витка соединяются с изолированными от вала медными пластинами коллектора, число которых в рассматриваемом случае равно двум. Две неподвижные щетки 4 налегают на коллектор. С помощью щеток обмотка якоря соединяется с внешней цепью.
Основной магнитный поток в электродвигателях постоянного тока создается обмоткой возбуждения, которая запитывается постоянным напряжением и располагается на сердечниках полюсов. Магнитный поток «идет» через якорь от северного полюса N к южному полюсу S, а от него через ярмо снова к северному. Ярмо и сердечники полюсов также изготавливаются из ферромагнитных материалов.
Генераторный режим двигателя постоянного тока
Предположим, что в нашем случае якорь электрической машины (рисунок 1 и рисунок 2 а)) движется по часовой стрелке. Тогда в проводниках обмотки якоря будет индуцироваться ЭДС, направление которой можно определить используя правило правой руки (рисунок 3 а)), что и показано на рисунках 1 и 2а). Поскольку поток полюсов является неизменным, то ЭДС сможет индуцироваться только в случае вращения якоря электродвигателя постоянного тока и называется ЭДС вращения.
Величина индуктируемой в проводнике обмотки якоря ЭДС будет равна:

Где: B – магнитная индукция воздушного зазора между якорем и полюсом в месте расположения проводника; l – активная длина проводника с током, то есть это длина, на протяжении которой проводник расположен в магнитном поле; υ – скорость движения проводника в магнитном поле (линейная).
В обоих проводниках из-за симметрии индуктируются одинаковые ЭДС, которые складываются по контуру витка, и поэтому полная ЭДС якоря двигателя постоянного тока будет равна:

ЭДС Еа является величиной переменной, так как проводники якорной обмотки попеременно проходят под южным и северным полюсами, в результате чего направление ЭДС в проводниках изменяется. Кривая ЭДС проводника по форме повторяет кривую распределения индукции B вдоль воздушного зазора в зависимости от времени t (рисунок 4 а)).
В двухполюсной машине частота ЭДС f равна скорости вращения якоря n, выраженной в оборотах в секунду: f = n. А вот в общем случае, когда двигатель постоянного тока имеет p пар полюсов с чередующеюся полярностью:

Обмотка якоря с помощью щеток замыкается через внешнюю цепь и, соответственно, в этой цепи начинает протекать ток Ia. В обмотке якоря будет протекать переменный ток и его кривая аналогична кривой ЭДС (рисунок 4). Однако во внешней цепи протекает постоянный ток, это объясняется действием коллектора. При повороте коллектора и якоря на 90 0 (рисунок 1) происходит смена коллекторных пластин под щетками и изменение направления ЭДС в проводниках. Вследствие чего под верхней щеткой всегда будет находиться пластина соединенная с проводником северного полюса, а под нижней щеткой пластина соединенная с проводником южного полюса. В результате такого соединения направление тока и полярность щеток для внешней цепи остаются неизменными.
Таким образом, коллекторный узел является механическим выпрямителем, который преобразовывает переменный ток якоря в постоянный ток внешней цепи.
Изменив знак второго полупериода кривой на рисунке 4 а), получим форму кривой напряжения и тока внешней цепи (рисунок 4 б)). Пульсирующий ток внешней цепи малопригоден для практических целей. Для избавления от пульсаций применяют более сложные по своему устройству коллектор и якорь двигателя постоянного напряжения, однако основные свойства машины постоянного тока могут быть рассмотрены на примере рассматриваемого нами простейшего двигателя постоянного тока.
Постоянное напряжение на зажимах якоря генератора будет меньше Еа на величину падения напряжения в сопротивлении обмотки якоря ra:

Поскольку проводники якоря находятся в магнитном поле и через них протекает ток Ia, то на них будут действовать электромагнитные силы (рисунки 1, 2 а)):

Направление этих сил определяют с помощью правила левой руки (рисунок 3 б)). Данные силы и создают электромагнитный вращающий момент, который будет равен:

Здесь Da это диаметр якоря машины. Из рисунков 1-2 а) можно увидеть, что в генераторном режиме данный момент действует против направления вращения якоря и является тормозящим.
Режим двигателя
Простейший двигатель постоянного напряжения может работать не только в режиме генератора, но и в режиме двигателя, если к обмотке якоря подвести напряжение от внешнего источника. На проводники обмотки якоря будут действовать электромагнитные силы Fпр в результате чего создается электромагнитный момент Мэм. Как и для режима генератора, величины Fпр и Мэм вычисляются из равенств (4) и (5). При достаточной величине Мэм якорь электрической машины придет в движение и будет развивать механическую мощность. Момент Мэм в таком случае будет являться движущим, и приводить в движение якорь в направлении вращения.
Если мы хотим, чтобы при той же полярности полюсов направление вращения генератора (рисунок 1-2 а)) и двигателя (рисунок 1-2 б)) были одинаковы, то направление действия Мэм, а также тока Iа у электродвигателя постоянного напряжения должны быть обратными по сравнению с генератором (рисунок 1-2 б)).
Коллектор превращает постоянный ток из внешней цепи в переменный ток якоря в режиме двигателя, что смело можно назвать механическим инвертором тока.
Проводники обмотки якоря электрической машины тоже вращаются в магнитном поле, из-за чего в обмотке якоря двигателя индуцируется ЭДС Еа, величину которой можно определить из формулы (1). В электродвигателе направление этой ЭДС (рисунок 1-2 б)) такое же, как и в генераторе (рисунок 1-2 а)). Таким образом, ЭДС якоря Еа в двигателе направлена против тока Ia и приложенного напряжения Ua к зажимам якоря. Поэтому довольно часто ЭДС якоря называют противоэлектродвижущей силой.
Напряжение, приложенное к якорю электрической машины, уравновешивается падением напряжения на обмотке якоря и ЭДС Еа:

Если сравнить уравнения (3) и (6) можно увидеть одну очень важную особенность – в режиме генератора Ua Ea.
Принцип обратимости электродвигателя
Из изложенных выше формул и описаний следует вывод, что каждая машина постоянного тока (и не только постоянного) может работать как в режиме двигателя, так и в режиме генератора. Такое свойство имеют все электрические машины, и оно носит название обратимость.
Для перехода двигателя постоянного тока из режима генератора в режим двигателя и обратно при неизменной полярности щеток и полюсов, а также при неизменном направлении вращения необходимо всего лишь изменить направление тока в обмотке якоря (что сейчас легко делается с помощью тиристорных преобразователей и других управляемых выпрямителей).
В современных системах такой переход осуществляется автоматически.
Преобразование энергии в двигателе постоянного тока
На рисунке 5 показаны направления действия электрических и механических величин в якоре двигателя и генератора постоянного тока.
В соответствии с первым законом Ньютона в применении к вращающемуся телу, действующие на это тело тормозящие и вращающие моменты уравновешивают друг друга. Поэтому в установившемся режиме работы генератора электромагнитный момент будет равен:

Здесь Мв – момент на валу генератора, который развивает приводной двигатель, Мтр – момент трения на коллекторе электрической машины и в подшипниках, а также сопротивления воздуха, Мс – тормозящий момент, вызываемый потерями на вихревые токи и гистерезис в сердечнике якоря. Данные потери мощности возникают вследствие вращения сердечника якоря в неподвижном магнитном поле полюсов. Электромагнитные силы, возникающие при вращении ротора электрической машины постоянного тока, оказывают на ротор тормозящее действие и в таком представлении ведут себя подобно силам трения.
Электромагнитный момент двигателя постоянного тока в установившемся режиме работы будет равен:

Здесь Мв – развиваемый рабочей машиной (насос, тележка, кран…) тормозящий момент на валу электродвигателя.
В режиме генератора электромагнитный момент Мэм является движущем, а в режиме двигателя наоборот, тормозящим. При этом в обеих случаях Мв и Мэм противоположны по направлению.
Электромагнитная мощность Рэм, развиваемая электромагнитным моментом Мэм, будет равна:


В данном случае ω – это угловая скорость машины постоянного тока.
Подставив значения Мэм и ω в формулу (8) из формул (5) и (9) и учтем, что линейная скорость на окружности якоря:

Или же на основании выражения (1):

Под действием тока Ia и ЭДС Еа в обмотке якоря развивается внутренняя электрическая мощность:

Исходя из формул (10) и (11), Рэм = Ра, то есть внутренняя электрическая мощность якоря равна электромагнитной мощности, которую развивает электромагнитный момент, что довольно наглядно демонстрирует процесс преобразования электрической энергии в механическую в режиме двигателя, и процесс преобразования механической энергии в электрическую в режиме генератора.
Умножив соотношения (3) и (6) на Ia получим следующие выражения для генератора:

Левые части приведенных выше формул представляют собой электрическую мощность на зажимах якоря, первые члены первых частей электромагнитную мощность все того же якоря, и последние выражение мощность потерь в якорной цепи.
Хотя полученные формулы приведены для простейшей машины постоянного тока (рисунок 1), они все равно будут действовать и в более сложной обмотке якоря, так как моменты отдельных проводников и ЭДС складываются. Данные формулы являются выражением закона сохранения энергии и отражают процесс преобразования энергии в машине постоянного тока.
Подведем итоги
Развиваемая на валу генератора приводным электродвигателем механическая мощность, за вычетом магнитных и механических потерь, превращается в электрическую мощность (с вычетом потерь в обмотке) и передается во внешнюю цепь. В режиме двигателя электрическая мощность, подающаяся на якорь электрической машины, частично расходуется на потери, а остальная ее часть преобразуется в мощность электромагнитного поля – потом в механическую мощность, которая после вычета потерь в стали якоря и сил трения с помощью вала передается рабочей машине (лифт, станок, тяговый привод электротранспорта и другие).
Общие закономерности превращения энергии для двигателей постоянного тока также актуальны и для двигателей переменного тока.