Асинхронный электрический двигатель 5АИ 80 В2 2,2/3000
Асинхронный электрический двигатель 5АИ 80 В2 2,2/3000
Описание
Характеристики
Отзывы
Двигатели асинхронного типа применяются как в быту, так и промышленных производственных сферах. Достоинствами асинхронных двигателей мощностью 2,2 кВт 3000 об/мин модели 5АИ 80 В2 является их простота в использовании, легкость установки и подключения, низкая стоимость электродвигателя, а также высокий пусковой момент.
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ — ДВИГАТЕЛЬ АСИНХРОННЫЙ 5АИ 80 В2 У2 IM 1081 (2081 / 3081) IP55:
- 5АИ / АИР — асинхронный электродвигатель с короткозамкнутым ротором;
- 80 – габаритный параметр двигателя (расстояние от центра вала электродвигателя до плоскости крепления, мм);
- В – монтажный размер по длине станины;
- 2 – количество полюсов;
- У2 – вид климатического исполнения согласно ГОСТ 15150-69;
- IM 1081 / IM 2081 / IM 3081 – монтажное исполнение электродвигателя;
- IP 55 — степень защиты по ГОСТ 17494.
| Параметры/модель | 5АИ 80 В2 |
| Общие технические данные | |
| Тип электродвигателя | асинхронный |
| Мощность электродвигателя | 2,2 кВт |
| Напряжение питания | 3 фазы * 220 / 380В |
| Скорость вращения | 3000 об/мин |
| Электротехнические данные | |
| Номинальный ток статора | 8 / 4,63 А |
| Коэфф. полезного действия | 83 |
| Коэффициент мощности | 0,87 |
| M max / M n | 2,3 |
| M п / M n | 2,2 |
| I п / I н | 7 |
| Защитное исполнение | |
| Степень защиты | IP55 |
| Климатическое исполнение | У2 |
| Масса | |
| Масса электродвигателя | IM 1081 — 15 кг IM 2081 — 17,3 кг IM 3081 — 16,5 кг |
- Степень защиты IP55 и климатическое исполнение У2;
- Пресс-маслёнки для смазки подшипников позволяют увеличить срок их службы;
- Резьбовое отверстие в торце вала для крепления шкива или вентилятора;
- Ударопрочная клеммная коробка;
- Индивидуальная упаковка электродвигателя;
- Гарантия 24 месяца или 10 000 часов наработки.
| Габарит/исполнение | IM 1081 | IM 2081 | IM 3081 |
| l 30 | 310 мм | ||
| h 31 | 204 мм | ||
| d 24 | — | 200 мм | |
| l 1 | 50 мм | ||
| l 10 | 100 мм | — | |
| l 31 | 50 мм | — | |
| d 1 | 22 мм | ||
| d 10 | 8 мм | — | |
| d 20 | — | 165 мм | |
| d 22 | — | 12 мм | |
| d 25 | — | 130 мм | |
| b 1 | 6 мм | ||
| b 10 | 125 мм | — | |
| h 1 | 6 мм | ||
| h 10 | 9 мм | — | |
| h | 80 мм | — | |
| h 5 | 24,5 мм | ||
Асинхронный двигатель 2,2 кВт 3000 об. модели 5АИ 80 В2 имеет различные исполнения:
На лапах – исполнение IM 1081;
Лапы + фланец (комбинированное) – исполнение IM 2081;
Фланцевое соединение – исполнение IM 3081.
К ОСНОВНЫМ КОНСТРУКТИВНЫМ ОСОБЕННОСТЯМ ОБЩЕПРОМЫШЛЕННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ОТНОСЯТСЯ:
- низкий уровень шума при работе;
- широкий диапазон частот вращения рабочего вала – 600; 750; 1000; 1500; 3000 об/мин;
- широкий диапазон мощностей – от 0,12 до 315 кВт;
- различные варианты рабочих напряжений и подключений к питающей сети 220/380, 380 либо 380/660;
- алюминиевый или чугунный корпус;
- продолжительный режим работы S1 (без частых остановок);
- различные степени защиты двигателей: IP54, IP55 по ГОСТ 17494-87;
- минимальная вибрация в процессе работы в соответствии с ГОСТ Р МЭК 60034-14-208;
- класс изоляции обмоток статора F (максимально допустимая температура 150°С).
Чем асинхронные электродвигатели отличаются от синхронных
Самые распространённые электродвигатели — трёхфазные машины переменного тока. Они есть двух видов — асинхронные и синхронные. В этой статье рассказывается в чём сходство и различие между машинами обоих типов и область их применения.
Принцип действия и устройство электромашин разных типов
Асинхронные и синхронные электродвигатели похожи по конструкции, но есть и отличия.
Устройство и принцип действия асинхронных электродвигателей
Это самые распространённые машины переменного тока. Такие электродвигатели состоят из трёх основных частей:
- Корпус с подшипниковыми щитами и лапами или фланцем.
- В корпусе находятся магнитопровод из железных пластин с обмотками. Этот магнитопровод носит название статор.
- Вал с подшипниками и магнитпроводом. Эта конструкция называется ротор. В электродвигателях с короткозамкнутым ротором в магнитопроводе находятся соединённые между собой алюминиевые стержни, эта конструкция носит название «беличья клетка». В машинах с фазным ротором вместо стержней намотаны обмотки.
В пазах статора со сдвигом 120° намотаны три обмотки. При подключении к трёхфазной сети в статоре наводится вращающееся магнитное поле. Скорость вращения называется «синхронная скорость».
Справка! В однофазных электродвигателях вращающееся поле создаётся дополнительной обмоткой или конструктивными особенностями статора.
Это поле наводит ЭДС в роторе, возникающий при этом ток создаёт своё поле, взаимодействующее с полем статора и приводящее его в движение. Скорость вращения ротора меньше синхронной скорости. Эта разница называется скольжение.
Рассчитывается скольжение по формуле S=(n1-n2)/n1*100%, где: · n1 — синхронная скорость; · n2 — скорость вращения ротора.
на скольжения в обычных электромоторах 1-8%. При увеличении нагрузки на валу двигателя скольжение и вращающий момент растут до критической величины, при достижении которой двигатель останавливается.
В электродвигателях с фазным ротором вместо беличьей клетки в пазах ротора намотаны три обмотки. Через токосъёмные кольца и щётки они подключаются к добавочным сопротивлениям. Эти сопротивления ограничивают ток и магнитное поле в роторе. Это увеличивает скольжение и уменьшает скорость двигателя.
Такие аппараты используются при тяжёлом пуске и в устройствах с регулировкой скорости, например, в мостовых кранах.
Принцип действия синхронных электродвигателей
Статор синхронной машины не отличается от асинхронной. Отличие в роторе. В отличие от асинхронного двигателя, вращение осуществляется за счёт взаимодействия вращающегося магнитного поля статора и постоянного поля ротора. Для его создания в роторе находятся электромагниты. Напряжение к катушкам подводится при помощи токосъёмных колец и графитных щёток.
Справка! В роторе синхронных машин малой мощности вместо электромагнитов установлены постоянные или просто магнитопровод имеет явновыраженные полюса. Скольжение, как в асинхронных машинах, отсутствует, и частота вращения определяется только частотой питающего напряжения.
Запуск электродвигателей
Асинхронные электрические машины мощностью до 30-50кВт запускаются прямой подачей электроэнергии. С двигателями большой мощности и синхронными машинами дело обстоит сложнее.
Пуск асинхронных двигателей большой мощности
Для запуска таких машин используются разные способы:
- Включение добавочных сопротивлений в цепь статора. Они ограничивают пусковой ток, а после разгона закорачиваются пускателем.
- В аппаратах, предназначенных для работы в сети с фазным напряжением 660 вольт обмотки в сети 380 вольт соединены треугольником. На время пуска они переключаются в звезду.
- В электромашинах с фазным ротором для запуска в цепь ротора включаются добавочные сопротивления. После разгона они закорачиваются.
- При наличии регулировки скорости, переключением обмоток или изменением частоты, двигатель включается на минимальные обороты. После начала вращения, обороты увеличиваются.
Пуск синхронных электромашин
В отличие от асинхронных машин, пуск которых производится взаимодействием поля статора и обмоток или беличьей клетки ротора, синхронную машину необходимо предварительно разогнать до скорости, близкой к синхронной.
- С помощью дополнительного асинхронного двигателя. Так запускаются машины с постоянными магнитами в роторе. При достижении скорости, близкой к синхронной, асинхронхронник отключается и подаётся напряжение в статор синхронного двигателя.
- Асинхронный пуск. В роторе, кроме электромагнита, находится «беличья клетка». С её помощью аппарат разгоняется, после чего в обмотку подаётся постоянное напряжение, и двигатель начинает работать в качестве синхронного.
- Обмотки ротора закорачиваются напрямую или через добавочное сопротивление. После разгона в них подаётся постоянное напряжение.
- При помощи ТПЧ (тиристорного преобразователя частоты) частота питающего напряжения и скорость вращения плавно поднимается до номинальной. Этот способ применяется в механизмах с регулировкой скорости.
Особенности и применение разных видов электродвигателей
У каждого типа двигателей есть достоинства и недостатки по сравнению с другими. Это определяет область их применения. Применение разных типов электромашин зависит от их особенностей конструкции и принципа действия.
Достоинства и использование асинхронных электродвигателей
Такие машины имеют достоинства перед синхронными аппаратами:
- простота конструкции и низкая цена; аппараты с фазным ротором позволяют регулировать скорость вращения и осуществлять плавный пуск без использования преобразователей частоты;
- большое разнообразие мощностей — от нескольких ватт до десятков киловатт.
Кроме достоинств есть недостатки:
- падение скорости вращения при росте нагрузки;
- более низкий КПД и большие габариты, чем у синхронных аппаратов той же мощности;
- кроме активной, такие аппараты потребляют реактивную (индуктивную) мощность, что ведёт к необходимости устанавливать компенсаторы или дополнительно оплачивать реактивную электроэнергию.
Используются такие машины практически везде, где необходимо приведение в движение механизма и есть трёхфазное напряжение 380 вольт.
Погружной асинхронный дисковый электродвигатель
Полезная модель относится к области электротехники и может использоваться при проектировании и изготовлении электродвигателей, применяемых в качестве приводов механизмов повышенной мощности, в частности: погружных насосов, предназначенных для поднятия из скважин на поверхность пластовых жидкостей: нефти, рассолов, воды.
Техническим результатом полезной модели является создание погружного асинхронного дискового электродвигателя с повышенным крутящим моментом и обладающего повышенными возможностями регулирования рабочих характеристик электродвигателя.
В погружном асинхронном дисковом электродвигателе, содержащем корпус, статор, прикрепленный к корпусу, и ротор, прикрепленный к валу двигателя, согласно полезной модели, статор и ротор выполнены в виде чередующихся блоков статоров и роторов, последовательно расположенных вдоль вала двигателя, статоры выполнены дисковыми и установлены с зазором относительно вала двигателя, между дисками статоров по окружностям расположены сердечники, на которых размещены фазные обмотки статоров, роторы выполнены дисковыми и установлены с зазорами относительно корпуса двигателя, между дисками роторов по окружностям установлены сердечники, на которых размещены обмотки возбуждения, между дисками роторов и статоров предусмотрены зазоры в интервале 0,2-0,5 мм.
1. Погружной асинхронный дисковый электродвигатель, содержащий корпус, статор, прикрепленный к корпусу, и ротор, прикрепленный к валу двигателя, отличающийся тем, что статор и ротор выполнены в виде чередующихся блоков статоров и роторов, последовательно расположенных вдоль вала двигателя, статоры выполнены дисковыми и установлены с зазором относительно вала двигателя, между дисками статоров по окружностям расположены сердечники, на которых размещены фазные обмотки статоров, роторы выполнены дисковыми и установлены с зазорами относительно корпуса двигателя, между дисками роторов по окружностям установлены сердечники, на которых размещены обмотки возбуждения, между дисками роторов и статоров предусмотрены зазоры в интервале 0,2-0,5 мм. 2. Погружной асинхронный дисковый электродвигатель по п. 1, отличающийся тем, что сердечники роторов, на которых размещены обмотки возбуждения, расположены равномерно в радиальных рядах. 3. Погружной асинхронный дисковый электродвигатель по п. 1, отличающийся тем, что между дисками роторов в радиальном направлении расположены по крайней мере два сердечника с обмотками возбуждения. 4. Погружной асинхронный дисковый электродвигатель по п. 1, отличающийся тем, что диски электродвигателя выполнены из алюминиевых немагнитных сплавов. 5. Погружной асинхронный дисковый электродвигатель по п. 1, отличающийся тем, что сердечники электродвигателя выполнены из электромагнитной стали.
Полезная модель относится к области электротехники и может использоваться при проектировании и изготовлении электродвигателей, применяемых в качестве приводов механизмов повышенной мощности, в частности погружных насосов, предназначенных для поднятия из скважин на поверхность пластовых жидкостей: нефти, рассолов, воды.
Широко известны асинхронные электродвигатели, содержащие статор и ротор, в которых ротор выполнен с прикрепленными к нему постоянными магнитами. Подобные технические решения известны, например, из патентов RU 2287721, RU 2571139.
Известные электродвигатели имеют следующие недостатки:
— значительные электромагнитные потери в постоянных магнитах ротора, сопровождающиеся значительным тепловыделением;
— пониженный крутящий момент на валу ротора электродвигателя.
Известен погружной электродвигатель по патенту RU 40824, выбранный в качестве прототипа. Прототип состоит из короткозамкнутого многоопорного ротора с промежуточными подшипниками, статора, магнитопровод которого набран из листов электротехнической стали, сердечника, имеющего двенадцать закрытых трапецеидальных пазов, в которые уложена трехфазная однослойная обмотка.
Прототип имеет следующие недостатки:
— недостаточно высокий крутящий момент;
— сложность регулирования скорости вращения ротора с валом;
— большой пусковой ток;
— низкий коэффициент скольжения.
Задачей и техническим результатом полезной модели является создание погружного асинхронного дискового электродвигателя с повышенным крутящим моментом и обладающего повышенными возможностями регулирования рабочих характеристик электродвигателя.
Технический результат достигается тем, что в погружном асинхронном дисковом электродвигателе, содержащем корпус, статор, прикрепленный к корпусу, и ротор, прикрепленный к валу двигателя, согласно полезной модели, статор и ротор выполнены в виде чередующихся блоков статоров и роторов, последовательно расположенных вдоль вала двигателя, статоры выполнены дисковыми и установлены с зазором относительно вала двигателя, между дисками статоров по окружностям расположены сердечники, на которых размещены фазные обмотки статоров, роторы выполнены дисковыми и установлены с зазорами относительно корпуса двигателя, между дисками роторов по окружностям установлены сердечники, на которых размещены обмотки возбуждения, между дисками роторов и статоров предусмотрены зазоры в интервале 0,2-0,5 мм.
Сердечники роторов, на которых размещены обмотки возбуждения, расположены равномерно в радиальных рядах.
Между дисками роторов в радиальном направлении расположены по крайней мере два сердечника с обмотками возбуждения.
Диски электродвигателя выполнены из алюминиевых немагнитных сплавов.
Сердечники электродвигателя выполнены из электромагнитной стали.
В предложенной конструкции электродвигателя увеличение крутящего момента достигается за счет использования в конструкции роторов рядов электромагнитов, каждый из которых создает свое дискретное электромагнитное поле. В результате сложения дискретных электромагнитных полей, результирующее электромагнитное поле роторов, взаимодействуя с магнитными полями статоров, обеспечивает получение на валу электродвигателя повышение крутящего момента.
Выполнение зазоров между дисками статора и ротора в пределах 0,2-0,5 мм позволяет снизить значение пускового тока.
Повышение точности регулирования, скорости вращения роторов с валом обеспечивается наличием значительного количества обмоток возбуждения роторов, так как в присоединенных параллельно друг к другу обмотках роторов любые изменения характеристик управляющего тока распределяются на все обмотки возбуждения роторов, растягивая во времени изменение скорости вращения роторов с валом.
За счет множества обмоток возбуждения роторов, следствием которого является повышение напряженности магнитного поля роторов, повышается коэффициент скольжения роторов относительно статоров.
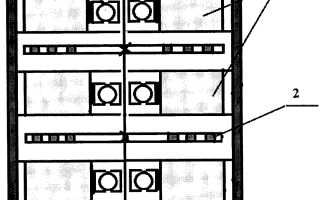
Сущность полезной модели поясняется чертежами.
На фигуре 1 изображена блочная система предложенного электродвигателя.
На фигуре 2 изображен вид сбоку на элементы: статор-ротор-статор с четвертным продольным разрезом.
На фигуре 3 изображен вид А-А сбоку на ротор.
На фигуре 4 изображен вид сбоку на статор.
Погружной асинхронный дисковый электродвигатель содержит корпус 1, роторы 2, жестко скрепленные с валом 4, и статоры 3, жестко скрепленные с корпусом 1. Дисковые роторы 2 каждый выполнены из двух закрепленных на валу 4 параллельных друг другу дисков 5, выполненных из немагнитных алюминиевых сплавов. Между дисками 5 роторов 2 закреплены радиальные ряды электромагнитов 6 с сердечниками 7 из электротехнической стали. Диски 5 роторов 2 скреплены между собой стяжками 8 и крепятся к полукольцам 9. Полукольца 9 с помощью резьбового соединения 10 прикреплены к валу 4 электродвигателя. Дисковые роторы 2 расположены по длине вала между блоками обмоток статоров 3. Диски 5 роторов 2 соединены между собой стяжками 11. Статоры 3 каждый содержит два диска 12, выполненных из немагнитных алюминиевых сплавов и прикрепленных к корпусу 1. Между дисками 12 статоров 3 закреплены электромагниты 13. Количество электромагнитов 13 является четным, равным количеству радиальных рядов электромагнитов 6 роторов 2. Диски 12 статоров 3 стянуты между собой с помощью стяжек 14. Позицией 15 обозначены стяжки статоров 3, позициями 16,17 обозначены тоководы.
Особенностью предлагаемой конструкции асинхронного дискового электродвигателя является следующее. При подаче электротока на обмотки возбуждения статоров, в обмотках электомагнитов роторов вырабатываются вихревые первичные токи, которые создают в сердечниках электромагнитные поля.
Указанные магнитные поля суммируются и, сцепляясь с магнитными полями статоров, обеспечивают заявленному электродвигателю повышение электромагнитных характеристик.
Другой особенностью предлагаемой конструкции является то, что в зависимости от типа подводимого тока к обмоткам статоров, а также наличия постоянного тока или его отсутствия в обмотках роторов, двигатель становится асинхронным или синхронным, с подводом переменного или постоянного тока.
Асинхронные двигатели

- Опросный лист
- Описание
- Типы роторов
- Принцип работы
- Опросный лист
- Описание
- Типы роторов
- Принцип работы
Опросный лист
Для того чтобы получить технико-коммерческое предложение с указанием цены, наличия и срока поставки заполните опросный лист (все поля которые Вам известны) и наш специалист подберёт асинхронные двигатели и вышлет ТКП. Не забудьте отправить вашу заявку указав e-mail и телефон.
Описание
Асинхронные электромашины – устройства, в которых частота вращения ротора и магнитного поля статора не совпадают.
В большинстве случаев, эти механизмы представляют собой двигатели. Первую пригодную к практическому использованию модель асинхронного электрического двигателя продемонстрировал и запатентовал русский инженер Доливо-Добровольский ещё в XIX веке (1889 г.) Эта конструкция привела также к идее использования трёхфазного тока, являющегося основным промышленным видом и по настоящее время.
Благодаря своим исключительным преимуществам:
- высокой надёжности;
- возможности прямого подключения к потребительской сети переменного тока;
- простоте эксплуатации и обслуживания
асинхронный двигатель в конструктивном отношении практически не изменился и стал наиболее распространённым типом электродвигателей. Они используются в качестве приводов практически повсеместно. Маломощные асинхронные (до 500 В) двигатели могут питаться от потребительской сети с одной фазой.
Устройство электромашин асинхронной системы
Двигатель асинхронного принципа работы составлен из двух главных компонент: статора с ротором. Статор – элемент неподвижный, ротор – приводной, вращающийся. Сердечники их состоят из пакетов стальных пластин. Таковая структура не даёт возникнуть в магнитопроводах асинхронных двигателей вихревым токам. Статорный сердечник запрессован в отлитую целиком станину. В его пазах с внутренней стороны находится обмотка из алюминиевой либо медной проволоки с изоляцией. Три части обмотки называются фазами. Обозначения выводов:
- на двигателях асинхронных, сконструированных до 1987 г. (ГОСТ183-74), буквами С с индексами: 1-3 – начала, 4-6 – концов фаз; нейтраль – буквой О;
- сейчас – международные: буквами U – первая фаза, V – вторая; W – третья, N – нейтраль. Начало фазы обозначается цифрой 1, а конец – 2.
Статорные обмотки соединяются «звездой» либо «треугольником». Схема соединений обозначается на клеммной колодке, расположенной на станине двигателя вместе с напряжением питания. К примеру, 660/380, Y/∆ означает, что двигатель асинхронный «звездой» следует подключать к электросети с напряжением 660 В, а «треугольником» – к сети на 380 В. Обмотки статорные являются источниками вращающемуся магнитному полю.
Типы роторов
Типы роторов
Роторная обмотка двигателя асинхронного заложена в пазы на внешней поверхности сердечника. Она бывает короткозамкнутой или фазной.
- Ротор короткозамкнутый. Обмотка составлена стержнями, замкнутыми между собой накоротко с обоих концов торцевыми кольцами. Тип обмотки называется «беличьей клеткой» из-за сходства по форме с беличьим колесом. У асинхронных двигателей с таким ротором нет наиболее слабого звена электромоторов – подвижных контактов, что существенным образом повышает надёжность и долговечность конструкции.
- Ротор фазный. Основным недостатком описанного выше асинхронного двигателя является ограниченность пускового момента по величине, обусловленная как раз короткозамкнутостью ротора. Для решения этой проблемы Доливо-Добровольским была разработана конструкция двигателя с асинхронной реализацией и с фазной обмоткой роторной. Количество полюсных пар должно совпадать с таковым у обмотки статорной. Витки соединены по схеме «звезда». На роторном валу установлены изолированные между собой кольца контактные, к которым выведены концы фазных витков. С внешней электролинией кольца двигателя асинхронного соединяются посредством металлографитовых щёток.
Преимущества и недостатки
Асинхронные электродвигатели с КЗ-ротором обладают следующими достоинствами:
- относительной стабильностью скорости при изменении нагрузки;
- устойчивостью к кратким механическим перегрузкам;
- конструктивной простотой;
- лёгкостью запуска и автоматизации этого процесса;
- повышенными cos φ и КПД, сравнительно с двигателями асинхронной же конструкции, но с фазным ротором.
К недостаткам же такого асинхронного двигателя относятся:
- проблемы в организации регулировки скорости вращения;
- большая величина тока пускового (в 5-10 раз выше номинальной), что приводит к перегрузке питающего асинхронные двигатели источника и скачкам в сети напряжения;
- низкий cos φ в случае недогрузки и, соответственно, падение полезной мощности.
Исходя из этого, применение асинхронного двигателя с ротором короткозамкнутым предпочтительно там, где в регулировке частоты вращения необходимости нет.
Асинхронные двигатели с ротором фазным имеют такие преимущества:
- высокий стартовый, вращающий ротор, момент;
- сохранение числа оборотов при перегрузках;
- пониженный пусковой ток;
- возможность плавного пуска в режиме автоматическом;
- регулируемость в некоторых пределах скорости вращения.
Такие двигатели асинхронные будут оптимальны на тех участках, где скачки тока нежелательны, и в механизмах, требующих переменной скорости вращения привода.
Принцип работы
Принцип работы
Основными принципами, лежащими в основе действия асинхронных электромашин, являются:
- создание статорными обмотками кругового магнитного поля, вращающегося в охватываемом ими объёме;
- порождение в обмотке ротора ЭДС индукции;
- появление наведённого тока в ней;
- возникновение электромагнитной силы, направленной перпендикулярно радиусу ротора (момента вращающего).
Поле магнитное вращается в сторону, определяемой порядком фазового чередования на статорных обмотках асинхронного двигателя. Частоту вращения поля определяют частота тока в питающей электросети и количество пар полюсов. Она не зависит от режима работы асинхронного двигателя и величины его нагрузки.
Важным свойством электродвигателя является возможность переключения его в режим генератора переключением фаз. В этом случае асинхронные двигатели с массивным ротором, тормозясь, возвращают электроэнергию в сеть питания.
Пуск асинхронных двигателей
Для старта таких электромоторов существует несколько способов:
- Прямое включение в сеть. Применимость этого простейшего метода ограничивается допустимостью скачков тока на линии. Мощность двигателя не должна быть более четверти мощности питающего линию трансформатора.
- При сниженном напряжении. Суть метода заключается в начальном разгоне ротора двигателя асинхронного типа напряжением, уменьшенным дросселями либо понижающими трансформаторами. При запуске этим способом электродвигатель должен находиться на холостом ходу, без нагрузки.
- Реостатный пуск. Через реостаты запускаются двигатели асинхронные нагруженные с ротором фазного исполнения. Эти элементы ограничивают величину пускового тока, пусковой же момент при этом увеличивается.
- С помощью частотного преобразователя. Плавный режим пуска асинхронного двигателя обеспечивается изменением угловой скорости магнитного поля статора при помощи изменения частоты подаваемого напряжения. Способ эффективен для двигателей с непостоянным режимом работы, например, приводов вспомогательных насосов в линиях неравномерного потребления воды.
- При помощи устройств плавного пуска. Эти схемы плавно меняют величину напряжения, подводимого к асинхронному двигателю, выводя его в рабочий режим без механических рывков и токовых перегрузок в сети.
Существуют также асинхронные двигатели с КЗ-ротором с пусковыми свойствами улучшенными, плавно выходящие на номинальные обороты благодаря конструктивным особенностям роторной обмотки. Она может быть двойной «беличьей клеткой» или располагаться в глубоком пазу. В обоих случаях пусковыми являются участки обмотки с более глубоким залеганием в теле ротора асинхронного двигателя.