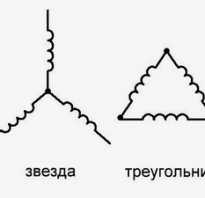
Что такое безредукторный двигатель
Что такое безредукторный двигатель
БЕЗРЕДУКТОРНЫЕ ПРИВОДЫ. ВЕЧНОЕ СТРЕМЛЕНИЕ К СОВЕРШЕНСТВУ
Иногда техническая система имеет ряд недостатков по своим тактико-техническим и экономическим показателям за счет наличия редуктора. Редуктор всегда предполагает определенный процент потерь передаваемой мощности за счет сил трения. Конечно, традиционным решением, применяемым уже около 200 лет для обеспечения низких частот вращения рабочих механизмов, является использование высокоскоростного двигателя с редуктором. Но всегда ли такое решение бывает единственно верным?
Почему без редуктора?
В 21 веке появилась возможность создать современную концепцию экономичного безредукторного привода. Новая концепция безредукторного привода исключает многие механические потери между двигателем и собственно рабочим агрегатом. За счет значительного сокращения энергозатрат безредукторный привод становится экономически привлекательным. По-видимому, дальнейшее развитие приводной техники будет связано именно с исключением механических передач, объединением электромеханических устройств с рабочими органами машины. Уже появились интегрированные конструкции: электрошпиндель, электронасос, мотор-колесо и другие. Введение электромеханических устройств, а затем и локальных систем управления непосредственно в конструкцию рабочих машин существенно упрощает последние, повышает их функциональные возможности и технические характеристики. Однако для массового внедрения безредукторного привода необходимо преодолеть ряд технических трудностей. Именно о них мы и будем говорить в нашей статье.
/25-1.gif) Отсутствие редуктора позволяет не только расширить функциональные возможности привода, но и снизить номенклатуру выпускаемых модулей при одновременном увеличении их серийности. Отсутствие редуктора снижает, прежде всего, металло- и трудоемкость производства такого привода, уменьшает его износ, шум при работе, упрощает обслуживание. Однако основное преимущество безредукторных приводов – это возможность повышения точности за счет отсутствия люфтов, существенного уменьшения мертвого хода, повышения резонансной частоты, снижения моментов сухого трения и других нежелательных факторов, вносимых редуктором. Кроме того, отсутствие редуктора позволяет обеспечить длительное сканирование с высокой частотой, скачкообразные шаговые движения и другие специальные режимы работы, требующие от привода высоких ускорений и частых реверсов. Требование многофункциональности вытекает из расширения круга задач, решаемых современными приводами, что подкрепляется большой гибкостью управления от микропроцессоров и микро-ЭВМ. В качестве двигателя безредукторного привода обычно выбирается бесконтактная синхронная электрическая машина с обмоткой на статоре и постоянными магнитами на роторе. Бесконтактность предоставляет возможность функционирования в самых тяжелых условиях и режимах, а выбор синхронной машины обеспечивает лучшие энергетические и массогабаритные характеристики по сравнению с асинхронной.
Отсутствие редуктора позволяет не только расширить функциональные возможности привода, но и снизить номенклатуру выпускаемых модулей при одновременном увеличении их серийности. Отсутствие редуктора снижает, прежде всего, металло- и трудоемкость производства такого привода, уменьшает его износ, шум при работе, упрощает обслуживание. Однако основное преимущество безредукторных приводов – это возможность повышения точности за счет отсутствия люфтов, существенного уменьшения мертвого хода, повышения резонансной частоты, снижения моментов сухого трения и других нежелательных факторов, вносимых редуктором. Кроме того, отсутствие редуктора позволяет обеспечить длительное сканирование с высокой частотой, скачкообразные шаговые движения и другие специальные режимы работы, требующие от привода высоких ускорений и частых реверсов. Требование многофункциональности вытекает из расширения круга задач, решаемых современными приводами, что подкрепляется большой гибкостью управления от микропроцессоров и микро-ЭВМ. В качестве двигателя безредукторного привода обычно выбирается бесконтактная синхронная электрическая машина с обмоткой на статоре и постоянными магнитами на роторе. Бесконтактность предоставляет возможность функционирования в самых тяжелых условиях и режимах, а выбор синхронной машины обеспечивает лучшие энергетические и массогабаритные характеристики по сравнению с асинхронной.
Требование создания безредукторного привода привело к необходимости применения встраиваемой конструкции, т.е. элементы электромеханической части привода – синхронная машина и, при необходимости, датчик положения ротора – изготавливаются и поставляются в виде статора и ротора без вала. При этом двигатель выполняется тихоходным, чтобы частота вращения его была гораздо ниже обычных значений 1000-6000 об/мин, неприемлемых для большинства объектов управления. Для обеспечения работы в разнообразных условиях эксплуатации можно также использовать различные системы защиты и охлаждения (воздушного, жидкостного и т.д.), что при встраиваемой конструкции и выделении всего тепла в статоре двигателя не представляет чрезмерно сложной задачи. Синхронная электрическая машина с постоянными магнитами обладает наиболее широкими функциональными возможностями по сравнению с другими видами электрических машин. При питании обмоток статора системой синусоидальных напряжений с необходимым временным сдвигом имеет место режим синхронного двигателя. Если на обмотку статора подавать систему разнополярных или однополярных импульсов напряжения, двигатель становится шаговым. При наличии обратной связи по положению ротора двигатель превращается в бесколлекторный аналог двигателя постоянного тока с возбуждением от постоянных магнитов, сохраняя присущий последнему характер механических и регулировочных характеристик, широкий диапазон регулирования частоты вращения и т.д. Этот режим называют также режимом вентильного двигателя.
Очень важно, что имеется возможность изменять характеристики привода путем изменения его структуры, а также путем изменения формы фазных напряжений или переключения секций обмотки статора синхронной машины, т.е. осуществлять так называемое программирование параметров. С целью обеспечения максимально возможной статической добротности в роторах безредукторных электроприводов использованы высококоэрцитивные постоянные магниты, как правило, из магнитных материалов на основе редкоземельных элементов (самария или неодима). Существуют исполнения и с магнитными системами ротора из феррита стронция. Применение высококоэрцитивных магнитов решает также задачу обеспечения устойчивости электродвигателя к значительным перегрузкам по току и моменту и позволяет не предусматривать никаких специальных мер защиты их от размагничивания. Применение высококоэрцитивных постоянных магнитов также позволяет увеличить воздушный зазор между статором и ротором; это, во-первых, облегчает монтаж двигателя в механизм, а во-вторых, дает возможность при необходимости разместить в зазоре тонкостенный немагнитный экран, герметически разделяющий полости статора и ротора.
В настоящее время безредукторный электропривод находит все более широкое применение в следующих областях:
• в различных приводах авиационной техники и РЛС;
• в подводных аппаратах, работающих на глубине до 6000 м, в качестве гребных двигателей и двигателей приводов рулей;
• в приводах манипуляторов для робототехники;
• в системах управления лентопротяжными механизмами различного назначения;
• в криогенной технике (двигатели насосов для перекачки жидкого азота);
• в приводах мотор-колес электрифицированных транспортных средств;
• в различных аппаратах медицинского приборостроения (привод перфузионных и вихревых насосов, центрифуг и т.п.);
• в оборудовании для АЭС.
/25-2.gif)
Привод для самого малого транспорта
Безредукторный электропривод появился в 20 веке. Мотор-колесный привод применялся (и применяется) в электрическом транспорте (зарубежные разработки), и главным препятствием к его всеобщему внедрению был банальный дефицит свободного места в подкузовном пространстве транспортного средства. Есть примеры внедрения мотор-колеса и в отечественных разработках. Например, в БелАЗах все оси «обмоторены». Более близкий нам пример – это мотор-колесо для легкового автомобиля, разработанное в НГТУ (ранее – Новосибирский электротехнический институт). Мотор-колесо для небольшого электромобиля отличается встроенным трехфазным торцевым асинхронным электродвигателем. Технические данные электродвигателя следующие: мощность длительного режима (так называемая работа с крейсерской скоростью) 6 кВт, напряжение 54 В, частота питания длительного режима f=400 Гц (2р = 8), КПД в длительном режиме 0,9, коэффициент мощности cos j = 0,75, кратность максимального момента в режиме разгона Мmах/М = 7,6, что реализуемо только в торцевом варианте двигателя. Масса активных частей двигателя-колеса обычно около 15 кг. В конце 1970-х годов первые такие электроприводы были изготовлены АвтоВАЗом совместно с новосибирскими разработчиками из НЭТИ. Современные мотор-колеса, выпускаемые инновационными предприятиями («Инкар-М» при РКК «Энергия»), изготавливаются из композиционных материалов и легких сплавов и представляют из себя безредукторные электроприводы с вентильными высокомоментными двигателями. Такие электроприводы уже устанавливаются на городских электромобилях, электрических скутерах, грузовых тележках, электроприводных креслах-колясках. Мотор-колесо представляет собой бесконтактный электродвигатель, в котором вращается не ротор, а статор. Статор является и ободом колеса. Высокий КПД – характерный признак такого низкооборотного, но высокомоментного двигателя.
Отличительные особенности мотор-колеса:
— Безредукторный вентильный электродвигатель встроен в ступицу колеса;
— Высококоэрцитивные постоянные магниты на основе редких металлов;
— Высокий удельный момент;
— Применение композиционных материалов и сплавов.
…и для очень большого
В карьерных самосвалах БелАЗах в одно целое объединены электродвигатель, силовая передача, тормозное устройство и колесо. Так удалось уменьшить потери энергии при передаче и существенно увеличить тягу. Энергию на каждое мотор-колесо в БелАЗе дает генератор, вращаемый обычным двигателем внутреннего сгорания. Отличительной особенностью мощных БелАЗов является именно электропривод – дизель-генератор и индивидуальные электроприводы у колес.
Безредукторный привод уже начал задавать новую тенденцию в лифтостроении. Современная концепция безредукторного электропривода лифтов быстро ставится на вооружение ведущими мировыми производителями лифтов и подъемного оборудования. Регулирование частоты приводов, работающих на 3-фазном токе, позволяет экономично использовать безредукторную технологию в лифтах грузоподъемностью от 1000 до 2000 кг на скоростях от 1,6 до 3,0 м/с и высотой подъема до 180 м. Новые приводы лифтов занимают мало места, просты в обслуживании, высокоэффективны и потребляют мало энергии. Благодаря этому даже в случае недостаточного электроснабжения можно установить более мощные лифты, чем при использовании традиционной редукторной технологии. Надежность безредукторных приводов достигается путем использования высококачественных материалов и соблюдения жестких производственных допусков.
Во-первых, отсутствие редукторного узла обусловливает высокую надежность и, следовательно, больший срок эксплуатации. Во-вторых, управляемая скорость вращения мотор-колеса, что достигается с помощью программируемого микропроцессора или персонального компьютера, управляющих скоростью и направлением. Нельзя не отметить повышенную плавность хода за счет того, что отсутствие редуктора позволяет вращаться двигателю без дискретного шага с очень высокой точностью. Наконец, у нового электропривода за счет применения новых материалов практически абсолютно бесшумная работа.
А. В. Соловов, «Оборудование Разработки Технологии»
Какое мотор-колесо лучше, с прямым приводом или редукторное?
Нас очень часто спрашивают, какое мотор-колесо лучше, редукторное или с прямым приводом. Однозначного ответа мы не дадим, так как у каждого из этих двух типов мотора есть свои преимущества и недостатки. Для кого-то важным покажется одно, для кого-то другое.
Чтобы сэкономить ваше время — напишем краткую выдержку:
- Если вам нужна скорость выше 30 км/ч, то вам нужно мотор-колесо с прямым приводом, мощностью 500 Вт и более, но при этом готовьтесь к тому, что выключенный мотор будет оказывать небольшое сопротивление при езде, а если захотите уверенный подъем в гору, то мощность должна быть 1500 Вт и более.
- Если вас устроит скорость до 30 км/ч, то вам подойдет редукторное мотор-колесо 350 Вт, при этом вы получите уверенный подъем в гору, отсутствие сопротивления при езде с выключенным двигателем, а также малый вес и габариты мотора. Если вас это устроит, то минусы редукторного мотора уже несущественны.
- Оба мотор-колеса безщеточные.
Редукторное мотор-колесо 250-350 Вт.
Для начала вкратце расскажем что такое редуктор и зачем его устанавливают в мотор электровелосипеда. Редуктор — это устройство, которое увеличивает крутящий момент мотор-колеса, но при этом снижает максимальную скорость движения до 30 км/ч. То есть заезжать на горку будет легко, но на прямой дороге скорость будет невелика. Это то же самое, как ехать на автомобиле на первой-второй передаче. У мотор-колеса с прямым приводом такой же крутящий момент будет доступен при мощности 1500 Вт.

Редуктор состоит из планетарной передачи с тремя пластиковыми шестернями внутри. Срок службы этих шестеренок зависит от режима эксплуатации и в среднем составляет 6-9 тыс.км. Замена шестеренок — дело несложное, занимает 1-2 часа, а их стоимость можно узнать здесь. Есть модификации со стальными шестернями, но это редкость, так как такие моторы довольно шумные.
.jpeg)
.jpeg)
.jpeg)
У редукторных мотор-колес отсутствует сопротивление при езде с выключенным мотором. Иначе говоря, если у вас сядет аккумулятор, то вы сможете ехать как на обычном велосипеде. Хороший накат обеспечивается наличием обгонной муфты, которая механически отсоединяет мотор от колеса, её можно сравнить с трещоткой на заднем колесе велосипеда — когда вам нужно, вы начинаете крутить педали и передавать крутящий момент на колесо, но колесо не может обратно передать свой крутящий момент на педали. Обратная сторона этого преимущества — невозможность рекуперации, то есть вы не сможете тормозить двигателем и заряжать батареи.
Следующая отличительная черта редукторного мотор-колеса — это компактность и малый вес. Многие даже не будут подозревать, что у вас электровелосипед, так как мотор в колесе будет чуть-чуть больше в диаметре чем втулка. Это опять-таки объясняется наличием редуктора внутри.
Большинство редукторных мотор-колес обладают максимальной мощностью 350 Вт, чуть реже 500 ватт, но не более. Это является относительно отрицательной стороной такого типа мотор-колес, так как далеко не всем нужны более мощные моторы.
Также стоит отметить низкий уровень шума у редукторных мотор-колес, они практически бесшумные. Не сказать что прямой привод шумит, но все-таки он немного громче работает, чем редукторное мотор-колесо.
Ну и напоследок про цену. Редукторное мотор-колесо стоит дешевле чем мотор-колесо с прямым приводом.
Мотор-колесо с прямым приводом (безредукторное).
У такой конструкции есть две основные части — ротор и статор. Ротор — это ось колеса с обмотками, она неподвижна и жестко закреплена к раме велосипеда. Статор — это втулка колеса с мощными постоянными магнитами, к которой закреплены спицы и обод, она подвижна. Такая конструкция крайне надежна и проста, так как в ней нет трущихся частей, кроме подшипников. Это классическая схема трехфазного двигателя переменного тока, только в ней статор вращается вокруг ротора.
.jpeg)
.jpeg)
.jpeg)
.jpeg)
Преимущества такого мотор-колеса:
- Надежность и простота конструкции
- Возможность тормозить двигателем (рекуперация)
- Большая мощность до 5000 вт
- Скорость передвижения до 100 км/ч
- КПД выше за счет отсутствия редуктора
- Небольшое сопротивление при езде с выключенным мотором. То есть если у вас сядет аккумулятор, то крутить педали будет чуть-чуть тяжелее, чем на таком же велосипеде без мотора. Это сопротивление сравнимо с легким встречным ветерком.
- Большие габариты и вес мотора
- Мотор-колесо с прямым приводом дороже редукторного при одинаковой мощности.
Итог: если вам нужна хорошая скорость от 30 км/ч — выбирайте прямой привод. В остальных случаях стоит отдать предпочтение редукторному мотор-колесу.
Электродвигатели серии MAC R
Электродвигатели серии MAC R
Асинхронные серводвигатели серии MAC R
Преимущества:
— Отличные динамические характеристики
— Исключительная операция ослабления поля
— Сокращенное обслуживание
— Универсальность скорости: от 300 до 7500 об / мин
— Подходит для использования в качестве прямого привода
Прямой привод
Безредукторный высокий крутящий момент — Решения для низкоскоростных двигателей
— Выгода достигается за счет снятия элементов механической трансмиссии и установки двигателей Vascat с прямым приводом с малым крутящим моментом. Снять редукторы, ремни и шкивы для непосредственного соединения двигателя с нагрузкой.
— Двигатели прямого привода VASCAT оптимизированы для плавной работы на низких скоростях и высоком крутящем моменте с мощностью от 2 кВт до 340 кВт в диапазоне от 100 до 1000 об / мин (от 50 до 7000 Нм).
— Очень эффективные приводные системы являются результатом безредукторной работы, особенно при замене коэффициентов до 1:10.
— Основанный на асинхронных векторных двигателях с прямым приводом VASCAT также предлагает более дешевую альтернативу часто используемым синхронным моторам с постоянным магнитом.
— VASCAT предлагает широкий спектр возможностей для приложений с прямым приводом. К ним относятся полый вал, бескаркасный комплект, упорный подшипник и т. д.
Выгоды использования:
— Повышение эффективности
— Компактный дизайн
— Более высокая динамика
— Меньше вибраций
— Сокращение простоев
— Повышает точность
— Чистота и отсутствие масла
— Нет обслуживания
— Экономия энергии
— Операция Near Silent
— Большая жесткость
— Нулевой люфт
Области применения:
— Возобновляемая энергия
— Преобразование
— Системы тестирования
— Печать
— Металлообрабатывающие линии
— Экструзия
— Провод и кабель
Электрическая настройка:
— Намотка персонализации в соответствии с требованиями каждого приложения.
— Оптимизация по крутящему моменту и мощности.
— Уменьшение размера преобразователя частоты за счет оптимизации расхода двигателя.
— Адаптация рабочей скорости (от 100 до 10 000 об / мин).
— Широкий диапазон напряжения питания (от 200 до 690 В).
Механическая настройка:
— Валы.
— Фланцы.
— Безрамные моторные комплекты.
— Подшипники.
— Система охлаждения.
— Тормоза.
— Соединения.
— Строительные материалы.
— Обратная связь, термодатчики и акселерометры.
Выгоды использования:
— Улучшение исполнения.
— Повышение производительности.
— Повышение точности приложений.
— Внедрение энергосбережения.
— Оптимизация затрат системы.
— Достижение тихой работы.
— Сокращение размеров системы.
— Уменьшение механических колебаний.
Навыки VASCAT:
— Нет минимального количества заказа.
— Быстрая реакция на запросы.
— Короткие сроки поставки.
— Профессиональная техническая поддержка.
— Инженерное мастерство в основных моторных технологиях.
— Передовые средства моделирования и проектирования.
— Сильное сотрудничество с клиентами / поставщиками.
Что такое безредукторный двигатель
Тургенев Д.В., Дементьев Ю.Н., Ланграф С.В.
СОВРЕМЕННОЕ СОСТОЯНИЕ ПРИВОДОВ ЛИФТОВ
Национальный исследовательский Томский политехнический университет
This work is about comparison of modern electric elevator winches produced by Russian and foreign manufacturers . The characteristics of electric drives and control systems are shown. The conclusion about the need to develop and create the domestic inverter for elevators is done.
Keywords: Gearless drive; low-speed induction motor; elevator.
В работе проведено сравнение современных электроприводов лифтовых лебедок российских и зарубежных производителей. Приводятся характеристики электроприводов и систем управления. Делается вывод о необходимости разработки и создания отечественного преобразователя частоты для лифтовых лебедок.
Ключевые слова: безредукторный привод; тихоходный асинхронный двигатель; лифты.
Лифтовые лебедки, а также средства ближнего транспорта (эскалаторы, пассажирские конвейеры и многокабинные подъемники) стали неотъемлемой частью искусственно созданной среды обитания человека. Расширяющиеся потребности общественного развития требуют непрерывного совершенствования средств внутреннего транспорта зданий и сооружений на основе современных научно-технических достижений.
Современное развитие приводной техники направлено на упрощение или исключение механических передаточных устройств. Еще в прошлом веке наметился переход к безредукторному приводу благодаря интенсивному развитию преобразовательной и микропроцессорной техники. В данной статье рассматриваются особенности создания безредукторного электропривода.
Основу механизма подъема современного лифта составляет канатная система передачи движения кабине, противовесу и электропривода.
К электроприводам подъемных механизмов предъявляются специфические требования: регулирование скорости в четырех квадрантах; обеспечение управления тормозом; контроль наличия фаз двигателя; контроль наличия фаз питающего напряжения; преодоление провалов питающего напряжения; эвакуация пассажиров при отключении основного питающего напряжения; плавный пуск/останов; обеспечение точности остановки кабины.
Наибольшее распространение в нашей стране и за ее пределами получили электрические лифты с канатными лебедками различного конструктивного исполнения.
Самым широкоиспользуемым типом электропривода в России в настоящее время является асинхронный двигатель (обычно двухскоростной) с редукторной передачей (червячной). Такие типы приводов устанавливались еще в 60-х годах ХХ века и требуют не просто модернизации, а полной замены существующего электропривода.
Лебедки с применением редуктора имеют следующие недостатки:
− дополнительные затраты на покупку, установку и обслуживание редуктора;
− из-за установки редуктора необходимо завышать мощность покупаемого и устанавливаемого двигателя;
− довольно быстрое изнашивание тормозной системы вследствие использования тормоза для динамического торможения.
Подобные лебедки все еще производятся, но количество с каждым годом уменьшается.
Сравнительно недавним изобретением компании ОТИС ( Otis Elevator Co .) является разработка безредукторного электропривода лифтовой лебедки с использованием синхронного электродвигателя на постоянных магнитах. Привод данной лифтовой лебедки представлен на рис. 1.


Рис. 1. Синхронный двигатель с постоянными магнитами.
В сравнении с традиционными редукторными системами, данный привод обладает рядом преимуществ:
− безредукторная лебедка с синхронным электродвигателем требует меньшее по размерам машинное помещение;
− отказ от редуктора позволяет на 50% снизить потери на трение, повышая в целом коэффициент полезного действия и снижая тепловыделение, что позволяет экономить до 20 % потребляемой электроэнергии;
− безредукторные лебедки не нуждаются в смазке, что исключает загрязнение машинного помещения и шахты смазочными маслами;
− отказ от редуктора значительно снижает уровень шума и вибраций;
− система частотного регулирования привода лебедки делает процесс ускорения и торможения идеально плавным.
На ряду с преимуществами, у данных лебедок есть и свой недостаток:
− при эксплуатации лебедок с синхронным электродвигателем в условиях повышенных температур, лебедка теряет свою работоспособность.
Разработкой компании КОНЕ (KONE Inc .) является лифтовая лебедка, вообще не требующая машинного помещения. Данная лифтовая лебедка называется EcoDisk (рис. 2).
Отличительное преимущество данного лифта заключается в отсутствии машинного помещения.
На рис. 4 представлена диаграмма применения современных конструкций лифтов. Как видно из диаграммы, количество безредукторных лифтов значительно больше и они охватывают значительно больший диапазон высот, чем гидравлические и редукторные вместе взятые.
В 2009 году Российская компания «РУСЭЛПРОМ» выпустила первый российский безредукторный привод лифта, в основе которого находится асинхронный тихоходный двигатель, питаемым преобразователем частоты (рис. 3).


Рис. 2. Лифтовая лебедка Рис. 3. Безредукторная лебедка EcoDisk
компании KONE Inc . производства компании «РУСЭЛПРОМ».

Рис. 4. Применение современных конструкций лифтов
Лифтовые лебедки с асинхронными тихоходным двигателем обладают следующими преимуществами:
− безредукторная лебедка с асинхронным электродвигателем требует меньшее по размерам машинное помещение;
− отказ от редуктора позволяет экономить до 20 % потребляемой электроэнергии;
− безредукторные лебедки не нуждаются в смазке;
− система частотного регулирования привода лебедки делает процесс ускорения и торможения идеально плавным;
− увеличение срока службы тормозной системы вследствие того, что тормозная система работает не на торможение и снижение скорости, а на удержание механизма.
В последние 2-3 года начали появляться работы по рассмотрению различных проблем, связанных с созданием безредукторных электроприводов для подъемных механизмов. Есть рекомендаций по выбору тихоходного асинхронного двигателя [1], рассмотрения особенностей механики [2] и проблем автоколебаний.
Проанализировав источники литературы и основываясь на практической деятельности было выяснено, что на сегодняшний день создание безредукторного электропривода сводится к покупке иностранного преобразователя частоты, подключение его к асинхронному тихоходному двигателю российского производства и долгие попытки настройки данной системы и приведение ее к рабочему режиму.
Необходима работа, способная шаг за шагом описать процесс создания системы управления асинхронным безредукторным электроприводом, рассмотреть и предложить пути решения следующих незатронутых задач:
− создание математического описания и разработка математической модели асинхронного тихоходного двигателя, с учетом намагничивания цепи;
− создание математической модели силового канала системы преобразователь частоты − асинхронный двигатель (ПЧ−АД);
− создание математического описания и математической модели безредукторной лифтовой лебедки с учетом переменного момента инерции, переменной частоты собственных колебаний и переменного момента сопротивления;
− создание системы управления безредукторной лифтовой лебедкой.
Современное состояние вычислительной техники позволяет не только создавать качественные системы управления, а также реализовывать вспомогательные алгоритмы, облегчающие наладку, настройку и эксплуатацию электропривода.
1. Масандилов Л.Б., Галкин А.А., Жолудев И.С., Фумм Г.Я. Асинхронный двигатель для безредукторного частотно-управляемого электропривода //Труды МЭИ, выпуск 684. − 2009. − С. 4 − 9
2. Дементьев Ю.Н., Ланграф С.В., Тургенев Д.В. Особенности механики лифтов с безредукторным приводом лебедки // Материалы IV международной научно-технической конференции «Электромеханические преобразователи энергии», 13 − 16 октября. Томск, 2009. − С. 236 − 240.