Что такое двигатели pmsm
Документация
Трехфазный синхронный двигатель со встроенными постоянными магнитами с синусоидальной противоэлектродвижущей силой
Powertrain Blockset / Движение / Электродвигатели и Инверторы
Motor Control Blockset / Электрические системы / Двигатели
Описание
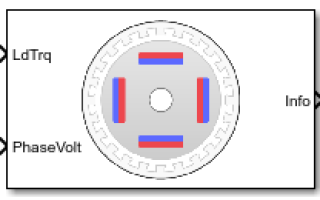
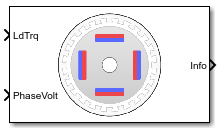
Блок Interior PMSM реализует трехфазный внутренний постоянный магнит синхронный двигатель (PMSM) с синусоидальной противоэлектродвижущей силой. Блок использует трехфазные входные напряжения, чтобы отрегулировать отдельные токи фазы, позволяя управление крутящего момента двигателя или скорости.
По умолчанию блок устанавливает параметр Simulation type на Continuous использовать время непрерывной выборки в процессе моделирования. Если вы хотите сгенерировать код для фиксированного шага дважды — и цели с одинарной точностью, рассматривая установку параметра на Discrete . Затем задайте параметр Sample Time, Ts.
На вкладке Parameters, если вы выбираете Back-emf , блок реализует это уравнение, чтобы вычислить постоянное постоянное потокосцепление.
λ p m = 1 3 ⋅ K e 1000 P ⋅ 60 2 π
Моторная конструкция
Этот рисунок показывает моторную конструкцию с однополюсной парой на двигателе.
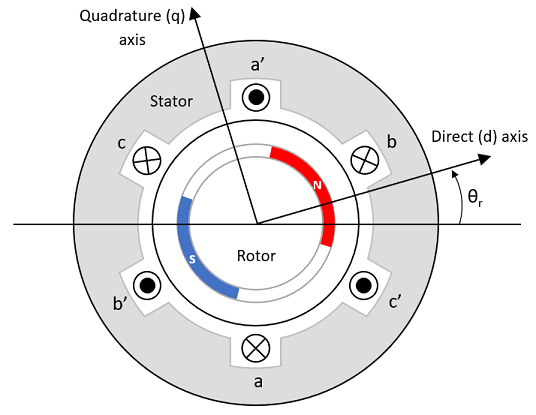
Моторное магнитное поле из-за постоянных магнитов создает синусоидальную скорость изменения потока с моторным углом.
Для соглашения осей a — выравниваются фаза и потоки постоянного магнита, когда моторный угол θr является нулем.
Трехфазная синусоидальная электрическая система модели
Блок реализует эти уравнения, описанные в моторной системе координат потока (dq система координат). Все количества в моторной системе координат отнесены в статор.
ω e = P ω m d d t i d = 1 L d v d − R L d i d + L q L d P ω m i q
d d t i q = 1 L q v q − R L q i q − L d L q P ω m i d − λ p m P ω m L q
T e = 1.5 P [ λ p m i q + ( L d − L q ) i d i q ]
Lq и индуктивность Ld представляют отношение между индуктивностью фазы и моторным положением из-за выступа двигателя.
Уравнения используют эти переменные.
q-и d-составляющие-индукции (H)
Сопротивление обмоток статора (Ом)
q-и напряжения d-оси (V)
Угловая механическая скорость двигателя (rad/s)
Угловая электрическая скорость двигателя (rad/s)
Постоянное потокосцепление, постоянное (Wb)
Противоэлектродвижущая сила (EMF) (Vpk_LL/krpm, где Vpk_LL является пиковым измерением от линии к линии напряжения),
Количество пар полюсов
Электромагнитный крутящий момент (Nm)
Электрический угол (рад)
Механическая система
Моторной скоростью вращения дают:
d d t ω m = 1 J ( T e − T f − F ω m − T m ) d θ m d t = ω m
Уравнения используют эти переменные.
Объединенная инерция двигателя и загрузки (kgm^2)
Объединенное вязкое трение двигателя и загрузка (N · m / (rad/s))
Моторное механическое угловое положение (рад)
Крутящий момент вала двигателя (Nm)
Электромагнитный крутящий момент (Nm)
Вал двигателя статический момент трения (Nm)
Угловая механическая скорость двигателя (rad/s)
Учет степени
Для учета степени блок реализует эти уравнения.
PwrTrnsfrd — Степень передается между блоками
Положительные сигналы указывают на поток в блок
Отрицательные сигналы указывают, вытекают из блока
PwrNotTrnsfrd — Степень, пересекающая контур блока, но не переданный
Положительные сигналы указывают на вход
Отрицательные сигналы указывают на потерю
Резистивные потери мощности
Потеря механической энергии
Когда Port Configuration установлен в Torque :
P m e c h = − ( ω m 2 F + | ω m | T f )
Когда Port Configuration установлен в Speed :
PwrStored — Сохраненный тариф на энергоносители изменения
Положительные сигналы указывают на увеличение
Отрицательные сигналы указывают на уменьшение
Сохраненная моторная степень
P s t r = P b u s + P m o t + P e l e c + P m e c h
Уравнения используют эти переменные.
Сопротивление статора (Ом)
Фаза a Stator, b, и c ток (A)
Статор q-и токи d-оси (A)
Фаза a Stator, b, и c напряжение (V)
Угловая механическая скорость ротора (rad/s)
Электромагнитный крутящий момент (Nm)
Амплитудный инвариант dq преобразование
Блок использует эти уравнения, чтобы реализовать амплитудное инвариантное преобразование dq, чтобы гарантировать, что dq и три амплитуды фазы равны.
[ v s d v s q ] = 2 3 [ потому что ( Θ d a ) потому что ( Θ d a − 2 π 3 ) потому что ( Θ d a + 2 π 3 ) − sin ( Θ d a ) − sin ( Θ d a − 2 π 3 ) − sin ( Θ d a + 2 π 3 ) ] [ v a v b v c ]
[ i a i b i c ] = [ потому что ( Θ d a ) − sin ( Θ d a ) потому что ( Θ d a − 2 π 3 ) потому что ( Θ d a + 2 π 3 ) − sin ( Θ d a − 2 π 3 ) − sin ( Θ d a + 2 π 3 ) ] [ i s d i s q ]
Уравнения используют эти переменные.
Статор dq электрический угол относительно ротора a — ось (рад)
Статор q — и d — напряжения оси (V)
Статор q — и d — токи оси (A)
Фазы a напряжения статора, b, c (V)
Текущие фазы a статора, b, c (A)
Порты
Входной параметр
LdTrq — Крутящий момент вала двигателя
scalar
Входной крутящий момент вала двигателя, Tm, в N · m.
Зависимости
Чтобы создать этот порт, выберите Torque для параметра Port Configuration.
Spd — Скорость вала двигателя
scalar
Скорость вращения двигателя, ωm, в rad/s.
Зависимости
Чтобы создать этот порт, выберите Speed для параметра Port Configuration.
PhaseVolt — Напряжения терминала статора
1 — 3 массив
Зависимости
Чтобы создать этот порт, выберите Speed или Torque для параметра Port Configuration.
Вывод
Info — Сигнал шины
шина
Сигнал шины содержит эти вычисления блока.
Фаза Stator текущий A
Фаза Stator текущий B
Фаза Stator текущий C
Прямая текущая ось
Квадратурная текущая ось
Прямое напряжение оси
Квадратурное напряжение оси
Угловая механическая скорость двигателя
Моторное механическое угловое положение
Электромагнитный крутящий момент
Резистивные потери мощности
Потеря механической энергии
Сохраненная моторная степень
PhaseCurr — Фаза a, b, c текущий
1 — 3 массив
MtrTrq — Крутящий момент двигателя
scalar
Крутящий момент двигателя, Tmtr, в N · m.
Зависимости
Чтобы создать этот порт, выберите Speed для параметра Mechanical input configuration.
MtrSpd — Частота вращения двигателя
scalar
Угловая скорость двигателя, ωmtr, в rad/s.
Зависимости
Чтобы создать этот порт, выберите Torque для параметра Mechanical input configuration.
Параметры
Mechanical input configuration — Выберите конфигурацию порта
Torque (значение по умолчанию) | Speed
Эта таблица суммирует конфигурации порта.
Simulation type — Выберите тип симуляции
Continuous (значение по умолчанию) | Discrete
По умолчанию блок использует время непрерывной выборки в процессе моделирования. Если вы хотите сгенерировать код для целей с одинарной точностью, рассматривая установку параметра на Discrete .
Зависимости
Установка Simulation type к Discrete создает параметр Sample Time, Ts.
Sample Time (Ts) — Шаг расчета для дискретного интегрирования
scalar
Шаг расчета интегрирования для дискретной симуляции, в s.
Зависимости
Установка Simulation type к Discrete создает параметр Sample Time, Ts.
File — Путь к параметру двигателя «.m» или «.mat» файлу
scalar
Введите путь к параметру двигателя «.m» или «.mat» файлу что вы сохраненное использование инструмента оценки параметра Motor Control Blockset™. Можно также нажать кнопку Browse, чтобы переместиться и выбрать «.m» или «.mat» файл, и обновить параметр File с именем файла и путем. Для получения дополнительной информации связанный с процессом оценки параметра двигателя, смотрите Estimate Motor Parameters Using Motor Control Blockset Parameter Estimation Tool.
Load from file — Нажмите эту кнопку, чтобы считать предполагаемые параметры двигателя из «.m» или «.mat» файла (обозначенный параметром File) и загрузить их с моторным блоком.
Save to file — Нажмите эту кнопку, чтобы считать параметры двигателя из моторного блока и сохранить их в «.m» или «.mat» файл (с именем файла и местоположением, которое вы задаете в параметре File).
Примечание
Прежде чем вы нажмете кнопку Save to file, гарантируете, что имя конечного файла в параметре File имеет или «.m» или «.mat» расширение. Если вы используете какое-либо другое расширение файла, блок отображает сообщение об ошибке.
Number of pole pairs (P) — Пары полюса
scalar
Моторные пары полюса, P.
Stator phase resistance per phase (Rs) — Сопротивление
scalar
Сопротивление фазы Stator на фазу, Rs, в Оме.
Stator d-axis and q-axis inductance (Ldq) — Индуктивность
vector
D-ось статора и q-составляющая-индукции, Ld, Lq, в H.
Permanent flux linkage constant (lambda_pm) — Поток
scalar
Постоянное постоянное потокосцепление, λpm, в Wb.
Back-emf constant (Ke) — Противоэлектродвижущая сила
scalar
Противоэлектродвижущая сила, EMF, Ke, в Vpk_LL/krpm. Vpk_LL является пиковым измерением от линии к линии напряжения.
Чтобы вычислить постоянное постоянное потокосцепление, блок реализует это уравнение.
λ p m = 1 3 ⋅ K e 1000 P ⋅ 60 2 π
Physical inertia, viscous damping, and static friction (mechanical) — Инерция, затухание, трение
vector
Механические свойства двигателя:
Инерция, J, в kgm^2
Вязкое затухание, F, в N · m / (rad/s)
Статическое трение, Tf, в N · m
Зависимости
Чтобы включить этот параметр, выберите Torque параметр конфигурации.
Initial d-axis and q-axis current (idq0) — Текущий
vector
Начальная буква q-и токи d-оси, iq, id , в A.
Initial mechanical position (theta_init) angle
scalar
Начальное моторное угловое положение, θm0, в рад.
Initial mechanical speed (omega_init) — Скорость
scalar
Начальная скорость вращения двигателя, ωm0, в rad/s.
Зависимости
Чтобы включить этот параметр, выберите Torque параметр конфигурации.
Ссылки
[1] Kundur, P. Устойчивость энергосистемы и управление. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, пополудни анализ неработающих энергосистем. Хобокен, NJ: нажатие Wiley-IEEE, 1995.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Документация Motor Control Blockset
- Примеры
- Блоки
- Информация о релизах
- PDF-документация
Поддержка
- MATLAB Answers
- Помощь в установке
- Отчеты об ошибках
- Требования к продукту
- Загрузка программного обеспечения
© 1994-2021 The MathWorks, Inc.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста — например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
Что производитель называет двигателем PMSM?
В Google легко найти производителей двигателей BLDC, но сложно найти PMSM. Может быть, здесь есть проблема терминологии. В Google есть много «Бесщеточных серводвигателей» или «Синхронных серводвигателей». Используют ли производители эти термины для обозначения двигателя PMSM?
В теории: BLDC имеет концентрированные обмотки статора и трапециевидную обратную ЭДС, метод управления называется «6-ступенчатая коммутация». PMSM имеет распределенные обмотки статора и синусоидальную обратную ЭДС, метод контроля называется «FOC».
На самом деле: Большинство так называемых BLDC двигателей на рынке имеют синусоидальную обратную ЭДС и могут управляться тем же методом FOC, что и двигатель PMSM. Но я думаю, что они все еще двигатель BLDC, а не PMSM.
Мой вопрос: «Бесщеточные / синхронные серводвигатели» больше похожи на теоретический двигатель PMSM? Что производитель называет двигателем PMSM?
3 ответа
Терминология для бесщеточных двигателей с постоянными магнитами сбивает с толку.
Если вы смотрите в научной / технической литературе как документы IEEE, то, как правило, BLDC относится к бесщеточным двигателям с постоянными магнитами, которые имеют трапециевидную обратную эдс и приводятся в движение шестиступенчатым трапециевидным приводом, в то время как PMSM относится к бесщеточным двигателям с постоянными магнитами, которые имеют синусоидальную обратную ЭДС и приводятся в движение синусоидальным сигналом. Имейте в виду, что бесщеточные двигатели с трапециевидной обратной ЭДС могут приводиться в движение синусоидальным сигналом и наоборот. И также имейте в виду, что трапециевидные и синусоидальные обратные ЭДС являются идеалами, и вы никогда не сможете получить ни одного из них. Конечно, я также видел документы IEEE, которые относятся к двигателям BLAC и используют другую терминологию, так что это не является строгим во всех аспектах.
Промышленность еще не полностью приняла эту терминологию. Вы часто будете видеть, что компании ссылаются на двигатели BLDC, как вы уже указали. И вообще под BLDC они имеют в виду именно то, что имеют в виду ученые — бесщеточный мотор с трапециевидной обратной эдс. Тем не менее, я также видел, что это относится к бесщеточным двигателям постоянного тока (DCB), бесколлекторным двигателям PM (BPM) или даже к PMSM.
С тем, что в научной литературе называется PMSM, я видел их как PMSM, бесщеточные двигатели переменного тока (BLAC), серводвигатели переменного тока, бесщеточный серводвигатель (BLSM) и другие.
Некоторые производители могут не проводить различие между двумя, потому что на самом деле это не то или другое. Вы не можете создать бесщеточный двигатель с идеальной трапецеидальной обратной ЭДС, и вы не можете создать двигатель с идеальной синусоидальной обратной ЭДС. Лучше всего поговорить напрямую с производителями и рассказать им, что вы хотите сделать, и они направят вас в правильном направлении.
In reality: Most so called BLDC motors on the market have sinusoidal back EMF, and can be controlled by the same FOC method as PMSM motor. But I think they are still BLDC motor, not PMSM.
Это может или не может быть правдой. По моему опыту, двигатели BLDC не имеют синусоидальной обратной ЭДС; они гораздо ближе к трапециевидным. Имейте в виду, что мы говорим о противо-фазовой фазе, а не о межкадровой обратной эдс. Иногда обратная ЭДС между линиями выглядит близко к синусоидальной, а обратная ЭДС фазы — нет.
Чипгуру
- Форум
- Правила форума
- Правила для Редакторов
- Правила конкурсов
- Руководство барахольщика
- Ликбез по форуму
- Изменить цвет форума
- Как вставлять фотографии
- Как вставлять ссылки
- Как вставлять видео
- Как обозначить оффтоп
- Как цитировать
- Склеивание сообщений
- Значки тем
- Подписка на темы
- Автоподписка на темы
- БиБиКоды (BBCode)
- Полигон для тренировок
- Калькуляторы
- Металла
- Обороты, диаметр, скорость
- Подбора гидроцилиндров
- Развертки витка шнека
- Расчёт треугольника
- Теплотехнический
- Усилия гибки
- Каталоги
- Подшипников
- Универсально-сборные пр.
- УСП-12
- Справочники
- Марки стали и сплавы
- Открытая база ГОСТов
- Применимость сталей
- Справочник конструктора
- Справочник ЧГ сталей
- Сравнение материалов
- Стандарты резьбы
- Таблицы
- Диаметров под резьбу
- Конусов Морзе
- Номеров модульных фрез
- Ссылки
- Темы без ответов
- Активные темы
- Поиск
- Наша команда
BLDC (БК мотор) — что, как, почему.
- Версия для печати
BLDC (БК мотор) — что, как, почему.
Сообщение #1 Strock » 23 фев 2018, 16:09
Всем здравствуйте! Итак, предлагаю обсудить и разобраться в сути BLDC моторов (бесколлекорных электродвигателей с постоянными магнитами). Такими движками можно оборудовать различный транспорт от скейтборда и самоката, до полноценного авто на электротяге.  да и не только электротранспорт. А потому было бы ооочень интересно узнать методы расчетов, формулы и пр., таких движков как для самостоятельной сборки оного с нуля, так и исходя из имеющегося железа. Например есть в наличии статор, то какие характеристики с него можно получить?! Как их получить?! И самое главное помимо расчетов железа, не помешало бы разобрать электронную составляющую — контролёры, инверторы и др. Т.к. эти двигатели и электроника управления ими тесно связаны.
да и не только электротранспорт. А потому было бы ооочень интересно узнать методы расчетов, формулы и пр., таких движков как для самостоятельной сборки оного с нуля, так и исходя из имеющегося железа. Например есть в наличии статор, то какие характеристики с него можно получить?! Как их получить?! И самое главное помимо расчетов железа, не помешало бы разобрать электронную составляющую — контролёры, инверторы и др. Т.к. эти двигатели и электроника управления ими тесно связаны.
Я в этом полный дуб, потому хотелось для себя разобраться, понять и научится строить БК моторы.
Тема создана в связи с наличием велика, статора, подходящего для создания БК мотора и желания установить последний на велосипед.
Надеюсь на ваше понимание и помощь! Вместе, думаю, разберемся, а выкладки по этой теме могут пригодится многим 
Отправлено спустя 16 минут 51 секунду:
BLDC — двигатели бесколлекторные постоянного тока и ч постоянными магнитами. Имеют три выхода с обмоток и являются трезфазными двигателями. А потому для их работы необходима электронная система управленя.
Бывают двух видов:
Inranner — классический вид, статор снаружи и ротор с магнитами внутри. Обычно высокооборотных.
Outranner — когда статор внутри и ротор с магнитами с наружи.

BLDC (БК мотор) — что, как, почему.
Сообщение #2 T-Duke » 23 фев 2018, 16:27
Как тот, кто уже много лет занимается этой тематикой, хочу сказать, что нужно еще правильно классифицировать моторы.
Английская аббревиатура BLDC говорит, что это просто Двигатель постоянного тока без щеток. Иными словами это бесколлекторный двигатель в понимании механического коллектора. Но без коллектора много типов двигателей с постоянными магнитами.
Поэтому принято называть именно BLDC двигатели с трапецеидальной формой тока. А двигатели которые питаются синусоидальным током, относят к другим подклассам — например PMSM.
Так же и режимы работы разные. Исконные BLDC работают в так называемом режиме блочной коммутации. То есть на обмотки подается не синус, а просто два состояния — включена обмотка, или выключена. При работе такой двигатель создает характерный тракторный шум. Можно двигатель питать от синусоидального контроллера. Их еще называют векторными. Тогда двигатель вертится плавно, без рывков и тракторного шума.
Следует отметить, что как правило на рынке не BLDC двигатели, а PMSM двигатели. Разница у них в конструкции магнитной системы. Именно BLDC двигатели заточены под работу с блочной коммутацией. У них рывки при переходе полюсов меньше. Если же запустить в блочном режиме синусоидальный двигатель, то он дергает сильнее, чем исконный BLDC. То есть пульсация крутящего момента у него выше. На видео как раз двигатель типа PMSM работающий в режиме BLDC двигателя.
Китайцы делают в основном PMSM двигатели для транспорта. Их проще делать. Поэтому родной режим работы таких двигателей не BLDC, а синусоидальный. и правильный контроллер к ним — синусоидальный (векторный).
Но конечно двигатели работают в обеих режимах. Мне лично нравится синусоидальный плавный режим работы. Именно это направление я и развивал для себя.
Различия между PMSM Motors и BLDC Motors
Различия между PMSM Motors и BLDC Motors
Говоря о разнице между двигателями PMSM и двигателями BLDCФактически, с точки зрения применения современных двигателей, разница между ними не так велика, и их можно заменить друг на друга.
Позвольте мне сначала поговорить о происхождении: двигатели PMSM возникли в 1920-х годах, но природная руда, используемая для постоянных магнитов в то время, имела продукт с низкой магнитной энергией, а изготовленные двигатели были большими по размеру. Их быстро заменили на современные электродвигатели возбуждения или асинхронные двигатели. До 1980-х годов PMSM быстро развивалась с появлением материалов NdFeB NdFeB, которые способствовали быстрому прогрессу в области серводвигателей.

Бесщеточный двигатель BLDCдолжен сказать щеточный двигатель постоянного тока 1873 года, британец Джеймс. Максвелл (каждый должен быть с этим знаком) завершил фундамент теории электромагнитного поля (электричество и магнетизм), и обмотки двигателя превратились в обмотки барабана. Это основная форма современного двигателя постоянного тока для двигателя постоянного тока. В 1891 году Арнольд основал теорию обмотки якоря постоянного тока. Конечно, все двигатели постоянного тока того времени использовали щетки для коммутации. До появления транзистора в середине этого столетия использование схемы транзистора (IGBT) вместо щеточного коммутатора щеточного двигателя и использование электронной коммутации позволяло снизить срок службы, безопасность, техническое обслуживание и перегрузочную способность. мотора щетки. Технические возможности »ограничены. В то время датчик Холла был стандартной конфигурацией. С развитием науки и техники обратная связь по положению ротора двигателя может быть реализована без датчика Холла. Однако в случае высокой точности управления, шагового серводвигателя и т. Д. Датчик Холла по-прежнему используется для управления скоростью.

Интерлюдия: Асинхронные двигатели появились позже двигателей с постоянными магнитами. В 1888 году Тесла открыл принцип электромагнитной индукции и создал двигатели переменного тока. Однако из-за ограничения возбуждения такие двигатели обычно называют асинхронными. Этот тип двигателя имеет простую конструкцию и используется. Преимущества переменного тока, отсутствие искр и т. Д. Широко используются в промышленности и в быту. Таковы современные инверторные кондиционеры без постоянного тока (конечно, инверторные кондиционеры постоянного тока — это BLDC). В 1902 году Дэниелсон предложил идею синхронного двигателя. Роторная часть снабжалась отдельным постоянным током для создания синхронного асинхронного двигателя. В настоящее время этот вид использования исчез с рынка и в основном используется в предыдущих часах, фонографах и магнитофонах. Частично это связано с тем, что двигатели с постоянными магнитами PMSM или BLDC являются синхронными двигателями, и замена синхронных асинхронных двигателей является исторической тенденцией. Однако двигатель Tesla современных транспортных средств на новой энергии отличается. В некоторых моделях используются асинхронные двигатели. В этом много факторов, поэтому я не буду здесь объяснять.
Возвращаясь к основному пункту, разница между PMSM и BLDC заключается в том, что мы часто называем первый синхронным двигателем с постоянными магнитами (синхронный двигатель с постоянными магнитами), а второй — бесщеточным двигателем постоянного тока (Brushless Direct Current Motor). Традиционное различие основано на двух типах обратной ЭДС. , Первый близок к синусоиде, а второй — к трапецеидальной волне. Различие формы сигнала относительно очевидно, но форма сигнала зависит от магнитного поля ротора, и форма сигнала не идеальна.

Сравнение статорной части очевидно. PMSM обычно использует распределенные обмотки на коротком расстоянии, а иногда используются дробные обмотки для дальнейшего уменьшения пульсаций и зубцового момента; BLDC использует концентрированные обмотки. Для части ротора PMSM использовала дугообразную магнитную сталь (в основном в связанной форме), а BLDC в основном использовала форму плитки (в основном в спеченной форме). Разница в использовании этих двух не очень большая, так что теперь они могут использоваться как взаимозаменяемые. , Но произведение магнитной энергии спеченной магнитной стали обычно выше, чем у спеченной стали, поэтому в основном используется спеченная сталь.
Что касается стратегий управления, то в наше время обычно используются алгоритмы FOC с векторным управлением. Эти люди не относятся к этой области, поэтому я не буду их подробно останавливаться.
Плотность мощности и момент инерции: обычно считается, что они имеют одинаковый объем и материал, а потери в меди и в железе одинаковы. Сравните выходную мощность двух. Из-за использования синусоидальной и трапециевидной волны в управлении плотность мощности BLDC выше 15%; Поскольку BLDC может обеспечить на 15% больше выходной мощности, он может обеспечить на 15% больше электромагнитного момента. Если вращательная инерция двух вращений одинакова, то инерция крутящего момента BLDC будет на 15% больше. Однако из-за стабильности управления синусоидой, если стратегия управления использует управление синусоидой, разница между ними не очевидна.
С точки зрения производительности: те же условия, что и раньше, общие характеристики BLDC высоки, но PMSM имеет больше преимуществ в отношении крутящего момента и гармонических составляющих.
Производственный процесс: Ротор изготовлен таким же образом, но сборка статора легко увидеть из приведенного выше рисунка, что PMSM более сложен, в основном включает в себя несколько процессов, связанных с перфорацией сердечника, намоткой проволоки, формированием проволоки, связыванием нескольких процессов в процессе. так как могут возникнуть царапины от краски и повреждение изоляции щелевого клина. BLDC в основном опускает процесс заливки и формовки, потому что процесс намотки непосредственно наматывается на железный сердечник.

Резюме: Фактически, бесщеточный двигатель постоянного тока BLDC представляет собой специальный синхронный двигатель с постоянными магнитами PMSM, и разница заключается только в разнице между сосредоточенной обмоткой и распределенной обмоткой. В процессе проектирования, какая форма более подходящая, зависит от конечной цели, преследуемой заказчиком, и фактического метода обработки продукции.