
Какой тип электродвигателя лучше всего подходит для моего проекта
Какой тип электродвигателя лучше всего подходит для моего проекта?
Узнайте, какие проекты лучше всего работают с коллекторными двигателями постоянного тока, бесколлекторными двигателями, серводвигателями и шаговыми двигателями.
Если вы разрабатываете проекты с движущимися частями, скорее всего, вам понадобится электродвигатель. Но существует несколько различных типов электродвигателей, обычно доступных разработчикам.
Коллекторные двигатели постоянного тока, бесколлекторные двигатели, серводвигатели и шаговые двигатели – это четыре наиболее распространенных типа электродвигателей, которые можно найти практически в любом проекте, в котором есть движение. Использование каждого из этих типов двигателей в вашем проекте имеет свой набор преимуществ и потенциальных проблем.
В данной статье рассматриваются типы проектов, для которых хорошо подходит тот или иной тип двигателя, и приводятся базовые рейтинги стоимости, крутящего момента, максимальной скорости и точности позиционирования по шкале от 0 до 5.
Коллекторный двигатель постоянного тока
Коллекторные двигатели постоянного тока являются самыми дешевыми, простыми и легкими в управлении из всех технологий двигателей, обсуждаемых в данной статье. Они идеально подходят для проектов с ограниченным бюджетом, которые не требую какого-либо точного управления позиционированием, и для которых отношение мощность/масса не очень важно.
 Оценка характеристик коллекторных двигателей постоянного тока
Оценка характеристик коллекторных двигателей постоянного тока
Коллекторные двигатели постоянного тока также полезны для проектов, требующих чрезвычайно простого управления. Эти типы двигателей могут управляться не более чем замыканием/размыканием ключа. Управление их скоростью – это просто регулировка напряжения, подаваемого на двигатель или изменение коэффициента заполнения (или скважности) ШИМ сигнала, если задействован микроконтроллер.
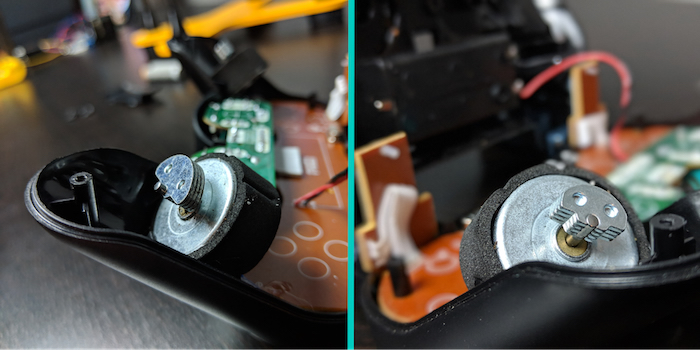 Пример коллекторного двигателя постоянного тока, используемого в проекте
Пример коллекторного двигателя постоянного тока, используемого в проекте
Лучшие типы проектов для коллекторных двигателей постоянного тока
Наборы для создания роботов для начинающих
Наборы для создания роботов для начинающих почти повсеместно используют коллекторные двигатели постоянного тока из-за их низкой стоимости и потому, что для их работы не требуются современные микроконтроллеры или сложное программирование.
Используя два двигателя с двумя колесами на каждой стороне шасси робота, мы можете создать достаточно сложного робота. Многие из базовых наборов робототехники такого типа доступны в магазинах.
Конструкции, использующие вибромоторы
Вибромоторы состоят из коллекторного двигателя постоянного тока с грузом, прикрепленным асимметрично к валу двигателя. Вы можете использовать вибромоторы в самодельных контроллерах и в любых других проектах, требующих доставки пользователю неслышимых уведомлений (например, как ваш телефон в режиме вибрации).
Из-за простоты управления коллекторными двигателями постоянного тока интенсивность вибрации можно модулировать, просто регулируя напряжение, подаваемое на двигатель.
Бесколлекторные двигатели
Несмотря на то, что бесколлекторные двигатели начинают заменять коллекторные двигатели постоянного тока в профессиональных устройствах и электромобилях, они также приобретают популярность в самодельных проектах благодаря наличию мощных, но доступных по цене микроконтроллеров.
 Оценка характеристик бесколлекторных двигателей
Оценка характеристик бесколлекторных двигателей  Пара примеров бесколлекторных двигателей
Пара примеров бесколлекторных двигателей
Бесколлекторные двигатели обеспечивают большую надежность, более высокие максимальные скорости и более высокую эффективность по сравнению с коллекторными двигателями постоянного тока. Однако они дороже, чем коллекторные двигатели постоянного тока, особенно с учетом того, что им требуются специализированные контроллеры скорости для взаимодействия с микроконтроллерами, что иногда может быть дороже, чем сам двигатель.
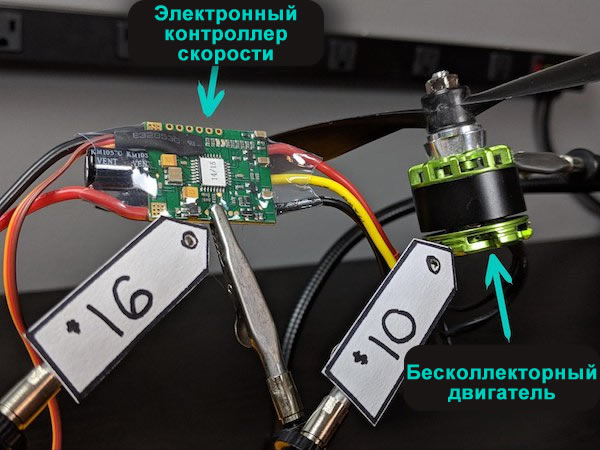 Зачастую стоимость управления бесколлекторным двигателем превышает стоимость самого двигателя
Зачастую стоимость управления бесколлекторным двигателем превышает стоимость самого двигателя
Лучшие типы проектов для бесколлекторных двигателей
Любительские проекты летательных аппаратов
Бесколлекторные двигатели чрезвычайно полезны в любительских проектах летательных аппаратов, включая квадрокоптеры, вертолеты и самолеты.
Более высокая эффективность бесколлекторных двигателей, по сравнению с коллекторными двигателями постоянного тока, имеет два основных последствия для проектов радиоуправляемых летательных аппаратов:
- Бесколлекторные двигатели потребляют меньше энергии для выработки той же мощности, что и коллекторный двигатель постоянного тока примерно такого же размера, что означает, что разработчики получают больше энергии от того же аккумулятора.
- Бесколлекторные двигатели имеют боле высокую выходную мощность при том же размере двигателя. В частности, для летательных аппаратов отношение мощности к весу является критически важной характеристикой, и бесколлекторные двигатели полезны для увеличения этого отношения.
 Бесколлекторные двигатели являются хорошим выбором для любительских проектов летательных аппаратов
Бесколлекторные двигатели являются хорошим выбором для любительских проектов летательных аппаратов
Радиоуправляемые машины
Радиоуправляемые машины, особенно те, которые используются для гонок, также выигрывают от технологий бесколлекторных двигателей. Более высокое отношение мощности к весу полезно в радиоуправляемых машинах по той же причине, что и для летательных аппаратов, для повышения производительности.
Для радиоуправляемых машин бесколлекторные двигатели обеспечивают большие крутящий момент и максимальные скорости, чем бензиновые двигатели. Кроме того, бесколлекторные двигатели в радиоуправляемых машинах обеспечивают пиковый крутящий момент почти мгновенно при подаче питания. Бензиновые двигатели, напротив, должны развивать более высокие скорости, чтобы максимизировать крутящий момент.
Стабилизатор камеры
Если вы записываете видео своего проекта, очень полезным инструментом для повышения профессионализма ваших видео за счет уменьшения тряски может стать стабилизатор камеры.
Стабилизатор камеры – это устройство, которое поддерживает камеру неподвижно, обеспечивая более плавные кадры. Стабилизаторы выполняют это, компенсируя движение, используя три бесколлекторных двигателя, по одному на каждую ось движения.
 Стабилизируйте камеру с помощью стабилизатора, состоящего из трех бесколлекторных двигателей
Стабилизируйте камеру с помощью стабилизатора, состоящего из трех бесколлекторных двигателей
Серводвигатели
В то время как коллекторные двигатели постоянного тока и бесколлекторные двигатели разработаны для регулируемой скорости, серводвигатели разработаны для точного позиционирования.
 Оценка характеристик серводвигателей
Оценка характеристик серводвигателей
Серводвигатели оснащены встроенным аппаратным обеспечением для определения положения, что позволяет контроллеру серводвигателя измерять точное угловое положение вала двигателя, также называемое углом поворота. Сочетание точного позиционирования и высокого крутящего момента, предлагаемое серводвигателями, делает их отличным выбором для ряда проектов, связанных с робототехникой.
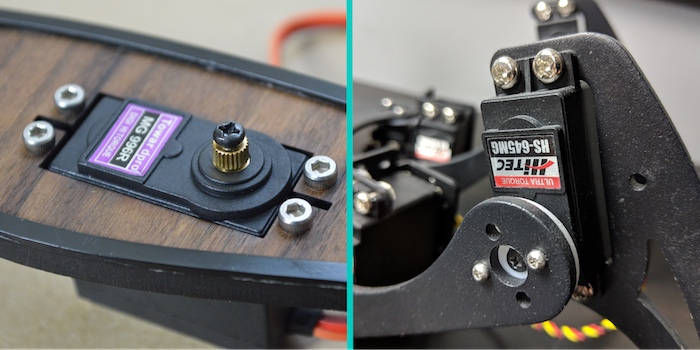 Примеры использования серводвигателей в проектах
Примеры использования серводвигателей в проектах
Лучшие типы проектов для серводвигателей
Шагающий робот
Если вы создаете шагающего робота, имеет ли он две, четыре, шесть или даже большее количество ног, серводвигатели почти наверняка будут выполнять основную работу в вашем проекте.
 В шагающих роботах серводвигатели действуют как суставы
В шагающих роботах серводвигатели действуют как суставы
В шагающих роботах серводвигатели выступают в качестве суставов (и немного похожи на мышцы, но анатомическая аналогия здесь немного нарушается). Компьютер, на котором работает ваш робот, будет использовать обратную кинематику для вычисления угла, который должен принимать каждый сустав, чтобы выставить робота в определенном положении. Серводвигатели позволяют контроллеру точно управлять углом каждого сустава робота.
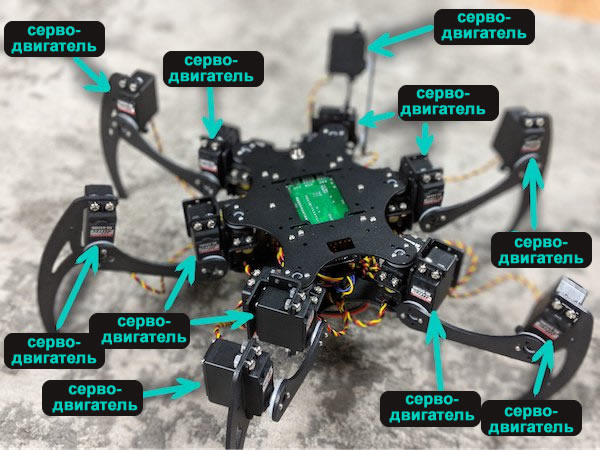 Если вы строите шагающего робота, то, скорее всего, вы будете использовать много серводвигателей!
Если вы строите шагающего робота, то, скорее всего, вы будете использовать много серводвигателей!
Роботизированные руки
Серводвигатели также полезны для создания роботизированных рук (роботов-манипуляторов). Высокая точность позиционирования, предлагаемая серводвигателями, позволяет микроконтроллеру устанавливать конечный исполнительный механизм манипулятора с высокой степенью точности.
 Это робот-манипулятор uArm Metal, работающий на сервоприводах
Это робот-манипулятор uArm Metal, работающий на сервоприводах
Серводвигатели также обеспечивают высокий крутящий момент на низких скоростях, благодаря редуктору между двигателем и выходным валом, что позволяет роботам-манипуляторам поднимать тяжелые предметы.
Наконец, сервопривод будет сопротивляться внешним силам, пытающимся изменить положение манипулятора. Например, если вы соберете роботизированную руку и заставите ее пройти дальше точки, которую ищет микроконтроллер, то, как только вы перестанете прикладывать усилие к манипулятору, серводвигатели вернутся в исходное положение.
Шаговые двигатели (описанные в следующем разделе), напротив, не имеют механизма для определения того, изменяют ли их положение внешние силы.
Рулевое управление для радиоуправляемых машин
В радиоуправляемых машинах серводвигатели обычно используются для рулевых механизмов. Поскольку сервоприводы могут быть точно установлены в нужное положение, а затем возвращены в центральное положение, они идеально подходят для рулевого управления. Серводвигатели позволяют управлять всеми видами радиоуправляемых проектов: от рулевых реек на радиоуправляемых машинках, до рулей направления на лодках, до управляющих поверхностей на самолетах.
Шаговые двигатели
Шаговые двигатели, как и серводвигатели, предназначены для построения машин, требующих точных управления и отслеживания позиционирования.
 Оценка характеристик шаговых двигателей
Оценка характеристик шаговых двигателей
То, как шаговые двигатели позволяют управлять позиционированием, сильно отличается от способа, используемого сервоприводами. Серводвигатели имеют возможности абсолютного позиционирования. В любой момент микроконтроллер может сделать запрос контроллеру сервопривода и получить назад значение угла.
Шаговый двигатель, напротив, использует относительное позиционирование. Шаговые двигатели вращаются не непрерывно (как коллекторные двигатели постоянного тока или бесколлекторные двигатели), а дискретными «шагами»,
Типовой шаговый двигатель имеет 200 шагов на полный оборот. Таким образом, каждый раз, когда шаговый двигатель «делает шаг», он поворачивается на 1,8°. Тщательно отслеживая количество шагов, на которое шаговый двигатель повернулся из известного начального положения, микроконтроллер может с высокой степенью точности определять положение двигателя или всего, что к нему прикреплено.
 Примеры использования шаговых двигателей в проектах
Примеры использования шаговых двигателей в проектах
Лучшие типы проектов для шаговых двигателей
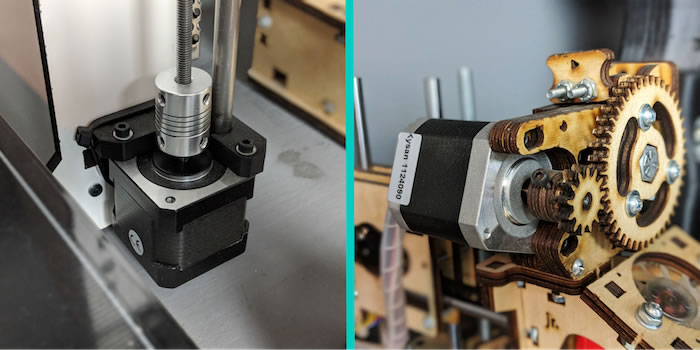
3D принтеры
Шаговые двигатели используются практически во всех настольных 3D принтерах. Эта технология двигателей позволяет контроллерам 3D принтеров отслеживать положение печатающей головки с точностью до минуты (обычно в масштабе микрометров). Кроме того, шаговые двигатели обеспечивают высокий крутящий момент на низких скоростях, что полезно для перемещения тяжелого экструдера вокруг рабочей области.
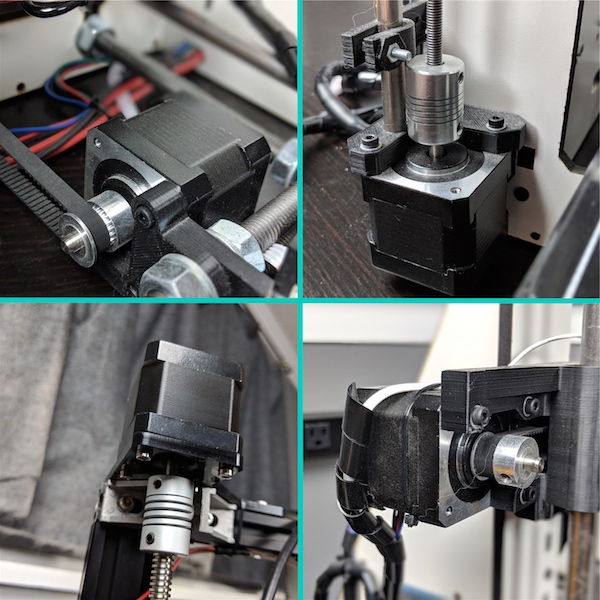 3D принтеры используют шаговые двигатели для отслеживания положения печатающей головки
3D принтеры используют шаговые двигатели для отслеживания положения печатающей головки
Станки ЧПУ
По причинам, аналогичным 3D принтерам, шаговые двигатели широко используются в станках ЧПУ. Станок с ЧПУ запускает задание с известной нулевой позиции. Контроллер подсчитывает количество шагов, на которое перемещаются двигатели, переводя их в расстояния в соответствие с конструкцией ремней, которыми управляют шаговые двигатели. Этот тип отслеживания положения обеспечивает высокий уровень точности размеров обрабатываемых станком ЧПУ деталей.
Большие роботы-манипуляторы
В предыдущем разделе объяснялось, как в более мелких роботах манипуляторах используются серводвигатели. В более крупных роботах манипуляторах часто используются шаговые двигатели. Таким образом, если вы разрабатываете робота-манипулятора, который должен будет перемещать тяжелые грузы, дополнительный крутящий момент больших шаговых двигателей по сравнению с крутящим моментом, обеспечиваемым серводвигателями, позволит вашему роботу-манипулятору поднимать и перемещать гораздо более тяжелые объекты.
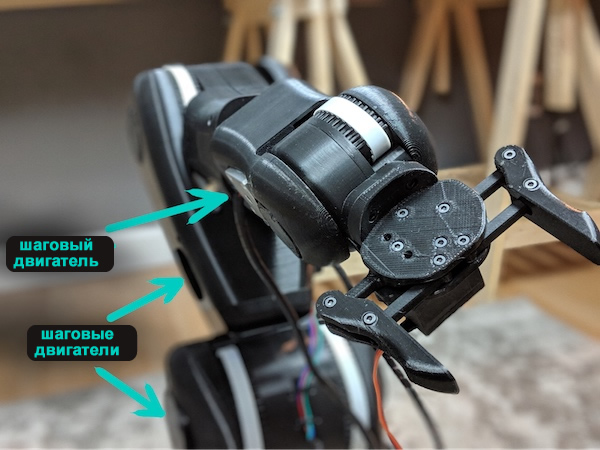 Шаговые двигатели хорошо работают в больших роботах-манипуляторах, которые требуют возможности подъема более тяжелых объектов
Шаговые двигатели хорошо работают в больших роботах-манипуляторах, которые требуют возможности подъема более тяжелых объектов
Шаговый электродвигатель
Прецизионные биполярные шаговые микродвигатели Faulhaber Precistep
Диаметр корпуса – 6…22 мм, удерживающий момент – 0,2…45 мНм, величина полного шага — 15…18°
Ссылки на подробное описание шаговых микродвигателей:
Шаговые микродвигатели:
Ссылки на сопутствующие компоненты малогабаритного привода:
Ознакомиться с описанием всей продукции компании Faulhaber можно по данной ссылке.

Малогабаритные гибридные шаговые двигатели Phytron для работы в особых условиях

Диаметр корпуса – 19…108 мм, удерживающий момент – 3,8 мНм…17Нм, величина полного шага — 1,8° (возможны значения 45°, 15°, 6,4°, 5°, 0,72° по запросу)
Ссылки на подробное описание шаговых микродвигателей:
Серии шаговых микродвигателей (космических):
Ссылки на сопутствующие компоненты малогабаритного привода:
- Редукторы (описания редукторов внесены в описания двигателей)
- Передачи винт-гайка (приведены в описании вакуумных моторов)
- Датчики (описания датчиков внесены в описания двигателей)
- Управляющие контроллеры
- Демпферы и муфты
Ознакомиться с описанием всей продукции компании Phytron можно по данной ссылке.
Малогабаритные гибридные шаговые двигатели Nanotec общего применения


Сторона фланца корпуса – 10…110 мм, удерживающий момент – 1,6 мНм…25 Нм, величина полного шага — 0.176 — 18°
Ссылки на подробное описание шаговых микродвигателей:
Шаговые малогабаритные двигатели:
Ссылки на сопутствующие компоненты малогабаритного привода:
Ознакомиться с описанием всей продукции компании Nanotec можно по данной ссылке.
Шаговый электродвигатель
Шаговые двигатели представляют собой конструкцию, состоящую из статора, с расположенными на нем обмотками возбуждения, и ротора из магнитно-мягкого или магнитно-твердого материала. Главным преимуществом является высокая точность: если на обмотки двигателя подать потенциалы, он повернется строго на определенный угол, т.е. позволяет получать точное позиционирование без обратной связи от датчиков положения. Точность выставления шага зависит от того, насколько качественно были обработаны ротор и статор.
Можно выделить три вида шаговых двигателей – с постоянными магнитами, реактивный, ротор которого выполнен из магнитно-мягкого материла, и гибридный. Последний сочетает себе лучшие качества первых двух и позволяет значительно улучшить статический и динамический эффект.
Шаговый двигатель как нельзя лучше подходит для автоматизации таких систем, где нет необходимости в высокой динамике. Они применяются в приводах, где управление производится последовательностью электрических импульсов.
Каталог
- По производителям
- По типу продукции
Несколько слов о компании

Наши специалисты находятся в непосредственном контакте с производителем, поэтому всегда готовы помочь, оперативно дать исчерпывающие ответы на Ваши вопросы, посоветовать оптимальное решение.
Что такое электродвигатель шаговый двигатель
Электродвигатели шаговые типов ШД-300/300-А и ШД-300/300-2А предназначены для обработки дискретных угловых перемещений путем переключений их обмоток с помощью специальных электронных коммутирующих устройств.
Структура условного обозначения
ШД-300/300-ХА:
ШД — шаговый двигатель;
300 — условный номер разработки;
300 — номинальная приемистость, шаг/с;
Х — исполнение двигателя по способу монтажа:
«без индекса» — IМ4081,
2 — IМ4082;
А — модификация двигателя.
Температура окружающей среды от минус 40 до 70°С.
Относительная влажность воздуха или другого газа до 98% при температуре до 35°С.
Пониженное атмосферное давление 53,6 кПа.
Повышенное давление воздуха или другого газа 148,6 кПа.
Изменение температур от 60 до 140°С.
Наличие инея с последующим его оттаиванием по ГОСТ В 14 000.0-78.
Вибрационные нагрузки в диапазоне частот от 1 до 200 Гц с ускорением 98,1 м·с — 2 .
Ударные многократные и одиночные нагрузки соответственно с ускорениями 343 и 1471 м·с — 2 и длительностями удара от 2 до 10 и от 1 до 5 мс.
Линейные (центробежные) нагрузки с ускорением 98,1 м·с — 2 .
Двигатели стойки к специальным воздействиям, установленным для группы 3 применения по НО.005.058.
Требования техники безопасности по ГОСТ 12.2.007.0-75 и ГОСТ 12.2.007.1-75.
В упакованном для транспортирования виде двигатели выдерживают воздействие многократных и одиночных ударов с ускорением 147 и 490 м·с — 2 при длительности импульса от 1 до 10 и от 1 до 6 мс соответственно.
Температура окружающего воздуха при транспортировании не ниже минус 60°С.
Двигатели отвечают требованиям ГОСТ В 14000.6-78 и ТУ ОРН.513.086. ! ГОСТ В 14000.6-78,ТУ ОРН.513.086
Напряжение питания на входе коммутирующего устройства, В — 24±2 Номинальный вращающий момент, Н·м, при моменте инерции нагрузки 6 кг·м 2 : 3·10 — 6 — 0,028 5·10 — 6 — 0,026 Номинальная приемистость при трехтактной коммутации, шаг/с, не менее — 300 Максимальная приемистость, шаг/с — 340 Номинальный шаг, градус — 3 Статическая погрешность отработки шагов на холостом ходу, %, не более — 20 Потребляемый ток в режиме фиксированной стоянки под током, А, не более — 1,3 Момент инерции ротора двигателей, кг·м 2 — 2,7·10 — 6 Сопротивление обмоток постоянному току, приведенное к температуре 20 °С, Ом — 23±2 Максимальный статический синхронизирующий момент при фиксированной стоянке под током и номинальном напряжении питания, Н·м, не менее — 0,08 Наименьший момент нагрузки на валу, при котором двигатели работают без пропуска шага, Н·м — 0,006 Масса, кг, не более — 0,45
Параметры двигателей обеспечиваются при условии, что форма поступающих от коммутатора импульсов напряжения при подаче их на активные сопротивления, равные сопротивлению обмоток фаз двигателей постоянному току, соответствует приведенной на рис. 1.
Форма и порядок чередования импульсов при направлении вращения
вала электродвигателей типа ШД-300/300 со стороны фланца:
а — против часовой стрелки;
б — по часовой стрелке;
U — напряжение питания;
t — время;
Т — период
Коммутирующее устройство, к которому подключается двигатель (рис. 2), содержит форсировочные резисторы R на (20±1) Ом и шунтирующие цепи, состоящие из резисторов R1 на (50±5) Ом и диодов VD. Допускается снижение значения сопротивления резисторов шунтирующей цепи до 30 Ом, при этом значение вращающего момента двигателей уменьшается до 0,022 Н·м при моменте инерции нагрузки 3·10 — 6 кг·м 2 и до 0,021 Н·м при моменте инерции нагрузки 5·10 — 6 кг·м 2 .
Схема подключения электродвигателей типа ШД-300/300 к
коммутирующему устройству:
Д — двигатель;
К — коммутирующее устройство;
R — форсировочные резисторы;
R1 — шунтирующие резисторы;
VD — диоды
Падение напряжения на коммутирующем устройстве не превышает 0,5 В.
Допускается питание двигателей при наличии пульсаций напряжения источника постоянного тока частотой 800 Гц при амплитуде не более 6%.
Режим работы продолжительный (S1) по ГОСТ 183-74.
Рабочее положение в пространстве любое.
Температура обмоток двигателей не должна превышать 140°С.
Сопротивление изоляции обмоток и других токоведущих цепей относительно корпуса составляет не менее:
100 МОм — в практически холодном состоянии;
10 МОм — при верхнем значении температуры окружающей среды и в нормальных климатических условиях;
1 МОм — при верхнем значении относительной влажности.
Изоляция обмоток и других токоведущих цепей относительно корпуса выдерживает без пробоя и перекрытия воздействие испытательного напряжения (действующее значение):
360 В — в практически холодном состоянии или при установившейся температуре двигателей;
220 В — в условиях воздействия повышенной влажности.
Минимальная наработка двигателей — 2000 ч.
Срок службы двигателей — 6,5 лет.
Срок сохраняемости двигателей — 6,5 лет.
Срок сохраняемости двигателей, вмонтированных в герметичную аппаратуру, в полевых условиях — не менее 5 лет.
Гарантийный срок эксплуатации — 6,5 лет.
Гарантийная наработка в пределах гарантийного срока эксплуатации — 2000 ч.
Гарантийный срок хранения — 6,5 лет.
Электрическая принципиальная схема двигателей представлена на рис. 3.
Принципиальная электрическая схема электродвигателей типа
ШД-300/300
Двигатели трехфазные, одностаторные, реверсивные.
Габаритные, установочные и присоединительные размеры двигателей представлены на рис. 4, 5.
Габаритные, установочные и присоединительные размеры
электродвигателей типа ШД-300/300-А
Габаритные, установочные и присоединительные размеры
электродвигателей типа ШД-300/300-2А
Управление двигателем осуществляется от электронного коммутирующего устройства по четырехтактной парной системе коммутации.
Двигатели имеют активный (с возбуждением от постоянных магнитов) ротор и статор с четырьмя обмотками управления.
В режиме форсированной стоянки под током в каждый момент времени находятся под напряжением две обмотки управления. Образующееся при этом магнитное поле удерживает ротор в определенном положении.
В режиме дискретного вращения осуществляется коммутация обмоток фаз статора в последовательности, указанной на рис. 1. При этом происходит дискретное перемещение магнитного поля статора, что приводит к дискретному повороту ротора с единичным шагом, указанным в технических данных.
Направление вращения вала двигателя против часовой стрелки, если смотреть со стороны присоединительного фланца, при коммутации обмоток фаз в последовательности, указанной на рис. 1, а. Для изменения направления вращения коммутацию обмоток фаз следует осуществлять в последовательности, указанной на рис 1, б.
Сердечник статора набран из листов магнитомягкого материала. Обмотка выполнена медным проводом круглого сечения и уложена в изолированных пазах магнитопровода.
Выводы от обмотки, выполненные монтажными проводами, выводятся через изолированную втулку в щите.
Статор впрессован в корпус. Щит и корпус выполнены из немагнитного материала. Крепление щита к корпусу осуществляется аргонно-дуговой сваркой.
Ротор двигателей выполнен в виде звездочки, состоящей из магнитных полюсов прямоугольного сечения с направленной кристаллизацией и втулки, выполненной из магнитомягкого материала. Магниты установлены на гранях втулки и опрессованы термореактивным материалом.
В двигателях используются два однорядных радиальных шариковых подшипника. ¦
В комплект поставки входят двигатель и паспорт. Техническое описание и инструкция по эксплуатации поставляются в 2 экз. каждому заказчику с первой партией двигателей.
Допускается оформление группового паспорта.
Шаговые двигатели и их применение
Подписка на рассылку
- ВКонтакте
- ok
- YouTube
- Яндекс.Дзен
- TikTok
 Рисунок 1. Шаговый электродвигатель Шаговый электродвигатель представляет собой двигатель, который является синхронным и бесщеточным. Он имеет несколько обмоток. Принцип работы такого двигателя является достаточно простым. Ток передается в одну из обмоток статора, и благодаря этому ротор фиксируется. Если активировать обмотки электродвигателя последовательно, то можно добиться дискретных угловых перемещений ротора, которые также именуются шагами.
Рисунок 1. Шаговый электродвигатель Шаговый электродвигатель представляет собой двигатель, который является синхронным и бесщеточным. Он имеет несколько обмоток. Принцип работы такого двигателя является достаточно простым. Ток передается в одну из обмоток статора, и благодаря этому ротор фиксируется. Если активировать обмотки электродвигателя последовательно, то можно добиться дискретных угловых перемещений ротора, которые также именуются шагами.
Шаговый электродвигатель имеет две основных части: статор и ротор. На статоре находятся обмотки возбуждения. В качестве материала, из которого изготовлен ротор, выступает магнитно-мягкий либо, наоборот, магнитно-твердый материал.
 Рисунок 2. Электродвигатель с постоянными магнитами Синхронный бесщеточный шаговый электродвигатель с несколькими обмотками широко применяется в различных устройствах, включая такие, как принтеры, сканеры, факсы, дисководы и прочие. Кроме этого, такие двигатели используются в промышленном оборудовании.
Рисунок 2. Электродвигатель с постоянными магнитами Синхронный бесщеточный шаговый электродвигатель с несколькими обмотками широко применяется в различных устройствах, включая такие, как принтеры, сканеры, факсы, дисководы и прочие. Кроме этого, такие двигатели используются в промышленном оборудовании.
Выделяют два вида таких электродвигателей: шаговые двигатели с постоянными магнитами и те, сопротивление которых является переменным магнитным. Второй тип двигателей именуют гибридным.
Шаговые двигатели с постоянными магнитами состоят также из статора с обмотками и ротора, который имеет постоянные магниты.
Полюса ротора чередуются. Форма у них прямоугольная, а располагаются они параллельно оси самого двигателя. За счет того, что ротор у таких электродвигателей намагничен, магнитный поток, так же, как и момент, достаточно большие, если сравнивать с теми двигателями, которые имеют переменное магнитное сопротивление.
Существуют также линейные шаговые синхронные двигатели. Чтобы довести процессы производства до автоматизма, зачастую возникает необходимость перемещать различные объекты в плоскости. Для этого и необходимы линейные шаговые синхронные двигатели. С их помощью импульсная команда преобразуется непосредственно в линейное перемещение. За счет этого кинематическая схема разнообразных электродвигателей становится значительно легче.
Шаговые приводы обладают целым рядом преимуществ. В связи с тем, что отсутствует обратная связь, которую, как правило, используют, чтобы управлять частотой вращения, конструкцию самого привода можно считать достаточно простой. Другое преимущество шаговых приводов — точность. Когда на обмотки подаются импульсы, шаговый двигатель поворачивается на угол, значение которого является определенным. Помимо этого, их можно совмещать с современными цифровыми устройствами.
Режимы работы синхронного шагового двигателя крайне важны для ознакомления. Так, чтобы электродвигатель функционировал устойчиво, необходимо добиться того, чтобы не было потерь шагов, когда происходит подача на обмотки управления импульсов. Режим отработки единичных шагов находится в соответствии с частотой подаваемых на обмотки самого двигателя импульсов. Электродвигатель же отрабатывает угол вращения, пока не придет новый импульс. Иначе говоря, в начале каждого следующего шага значение скорости, с которой вращается сам двигатель, равно нулю. Из-за запаса кинетической энергии, появившегося в результате отработки угла валом электродвигателя, возникает вероятность возникновения колебаний углового вала этого двигателя относительно того значения, которое установилось. Происходит преобразование кинетической энергии в потери, в том числе механические, электрические и другие. От величины потерь зависит скорость процесса отработки шага. Чем больше это значение, тем быстрее завершится и данный процесс.

