Что такое энерция двигателя
Что такое энерция двигателя



РАЗДЕЛ ТРЕТИЙ
СУДОВАЯ ПРАКТИКА
Глава XI. КРАТКИЕ СВЕДЕНИЯ О НАВИГАЦИОННЫХ КАЧЕСТВАХ СУДНА
§ 44. ХОДКОСТЬ И ИНЕРЦИЯ
Ходкостью называется способность судна перемещаться на воде с заданной скоростью при определенной мощности двигателя. Ходкость является одновременно мореходным качеством и маневренным элементом судна. Инерция является только маневренным элементом судна.
1. Ходкость
Скорость движения или ход сообщается судну в результате работы двигателя и движителя.
Сила, которая сообщает судну движение, называется упором. Мощность судового двигателя, приводящего в действие движитель (гребной винт и т. д.), зависит от назначения судна и его габаритов. Не вся мощность двигателя используется движителем для создания упора. Часть мощности теряется бесполезно в виде потерь на трение в подшипниках и в других движущихся частях машины и гребного вала. Часть мощности теряется еще и при взаимодействии винта с водой.
Отношение полезной мощности, использованной на создание упора N y к полной мощности двигателя N называется полным коэффициентом полезного действия — к.п.д. Для маломерных судов в зависимости от качества выполнения линии гребного вала и винта полный к.п.д. обычно составляет от 0,45 до 0,55.
Чем меньше сопротивление воды, тем большую скорость сообщит упор судну. Поэтому скорость движения зависит не только от мощности мотора, но и от обводов корпуса, от качества его окраски и от соотношения ширины, длины и осадки судна.
Обводы корпуса с малым сопротивлением движению существенны для судов с большой скоростью, например для спасательного катера, но совершенно не обязательны для туристских катеров. При дальних туристских плаваниях на судах с большой скоростью все внимание судоводителя будет направлено на отыскание фарватера. Обход препятствий лишит его возможности испытать прелести похода. Кроме того, быстрое движение судна лишает и других участников похода возможности любоваться окружающей природой, а при волнении, даже небольшом, утомляет их.
При разгоне судна упор растет с увеличением скорости судна, но это продолжается до некоторого предела, после чего сила сопротивления становится равной упору, т. е. судно начинает двигаться равномерно, с постоянной скоростью.
Для водоизмещающих круглодонных небыстроходных судов (катеров), больших туристских и рабочих лодок с подвесными моторами скорость можно ориентировочно определить по формуле:
V = 4,2  .
.
Для полуглиссирующих быстроходных катеров с V-образными обводами и водоизмещением до 5 т, а также для лодок с подвесным мотором скорость определяется по формуле
V = 6  ,
,
где N — мощность двигателя, л с.;
L — длина корпуса по грузовой ватерлинии, м;
D — весовое водоизмещение с командой, грузом и топливом, т;
На очень малом ходу судно плохо слушается руля, так как давление воды на руль небольшое. Увеличение скорости способствует улучшению поворотливости судна.
Самой малой скоростью или самым малым ходом называют наименьшую скорость, при которой судно слушается руля и способно управляться. Малый ход равен 50% полного хода, который принимают за 100%, а средний — 75%.
Скорость хода измеряется расстоянием, которое проходит судно в единицу времени и выражается в узлах (милях в час), километрах в час и в метрах в секунду.
Скорость хода для каждого судна определяется опытным путем (см. §26).
Ходкость судна характеризуется скоростью хода и инерцией, от которых зависит успешное маневрирование судна, и для каждого судна они индивидуальны.
В режиме плавания судна, при котором его вес полностью уравновешивается гидростатической силой поддержания, с началом движения на судно действует горизонтальная сила сопротивления водной среды. Эта сила направлена противоположно движению судна и называется сопротивлением воды. Чем больше скорость хода судна, тем больше сопротивление воды. Кроме сопротивления водной среды, или гидродинамического сопротивления, на судно действует сопротивление воздуха (аэродинамическое сопротивление), особенно увеличивающееся при сильном встречном ветре.
Полное гидродинамическое сопротивление состоит из сопротивления формы (вихревого и волнового сопротивления) и сопротивления трения.
Волновое сопротивление — это сила сопротивления воды, возникающая при движении судна, раздвигающего воду, и связанная с потерей энергии на волнообразование. Волновое сопротивление зависит от скорости судна, размерений и обводов его, глубины фарватера. С уменьшением скорости уменьшается волновое сопротивление. Относительная величина волнового сопротивления зависит от ободов подводной части корпуса судна. Судно с неудачными обводами вызывает большую волну при своем движении. Судно с хорошими обводами может волны почти не вызывать.
Вихревое сопротивление вызывается выступающими частями подводной части судна, например транцем, угловым ахтерштевнем, а также шероховатостями днища.
Сопротивление трения определяется вязкостью или силой сопротивления взаимному перемещению слоев воды. Слой воды, прилипший к обшивке корпуса, увлекается движущимся судном и называется пограничным слоем. Благодаря хаотическому тепловому движению молекулы воды из пограничного слоя переходят в прилегающий к нему слой воды и уносят некоторое количество движения, сообщенное им движителем судна. Уменьшение количества движения по второму закону Ньютона равно отрицательному импульсу силы, что и объясняет возникновение сил вязкого трения. Шероховатости увеличивают толщину пограничного слоя. Величина сопротивления трения тем больше, чем больше площадь смоченной поверхности обшивки корпуса и степень ее шероховатости, чем больше скорость хода и вязкость, определяемая плотностью и температурой воды. Сопротивление трения увеличивается с увеличением плотности воды и с уменьшением ее температуры. При одинаковой длине, ширине и осадке судна сопротивление трения всегда меньше у судов с закругленным поперечным сечением корпуса.
При увеличении скорости движения судна ввиду плохой сжимаемости воды давление в носовой части судна увеличивается и падает перед винтом. Носовая часть судна поднимается из воды, корма садится (увеличивается дифферент на корму) и днище судна начинает двигаться под углом к поверхности воды. На глиссирующее судно начинает действовать гидродинамическая подъемная сила, уменьшающая гидростатическую силу поддержания. При малой скорости гидродинамическая подъемная сила незаметна, но с увеличением скорости она увеличивается. Поэтому судно с плоским днищем при определенной скорости можно заставить скользить по поверхности воды или глиссировать.
В режиме глиссирования гидродинамическое сопротивление значительно меньше, чем при водоизмещающем режиме движения судов. Особая конфигурация корпуса глиссера обеспечивает ему быстрый переход из водоизмещающего режима в режим глиссирования, особенно если на днище имеется выступ-редан. Редан при сравнительно небольшом увеличении мощности значительно увеличивает скорость, которая у некоторых групп глиссеров достигает 200 км/час.
Общей оценкой глиссера является отношение его полного водоизмещения к мощности его двигателя. Иногда для той же цели применяют обратную величину, т. е. мощность двигателя, приходящуюся на единицу веса.
Глиссеры при хорошей скорости не обладают хорошими мореходными качествами, грузоподъемность их сравнительно мала. Поэтому глиссеры обычно используются только как спортивные суда.
При встрече даже с небольшой волной плоское днище глиссера испытывает сильнейшие удары, вызывая тряску. Это не только отражается па прочности судна, но и быстро утомляет команду.
Безреданные катера с глиссирующими обводами движутся при небольшом остаточном водоизмещении, они могут развивать большую скорость и иметь большую грузоподъемность. Эти суда менее чувствительны к волне, чем глиссер, и успешно преодолевают небольшие волны. Поэтому у них район плавания больше, чем у глиссеров. Такие катера используются как спасательные, разъездные, туристские.
Сейчас построены и строятся суда на подводных крыльях, у которых корпус судна глиссирующий, а под корпусом делаются несущие поверхности — подводные крылья. На самом полном ходу корпус такого судна движется в воздухе — над водой.
При одинаковой площади и скорости подъемная сила подводного крыла в три-четыре раза больше, чем у редана. Гидродинамические качества крыла зависят от угла атаки и удлинения крыла. Суда на подводных крыльях имеют большие скорости, экономичны, более мореходны, чем глиссеры. Это обусловлено тем, что при движении на крыльях корпус находится над водой и не испытывает ударов волн, а при плавании на малых скоростях уменьшается качка. Наилучшая мореходность достигается тогда, когда вес катера приблизительно поровну распределяется на носовое и кормовое крыльевые устройства.
Суда на подводных крыльях могут идти над небольшими волнами, а при большой волне уменьшить ход и двигаться как обычные водоизмещающие суда; они всегда должны следовать по судоходному фарватеру или по местам, где глубины известны. Эти суда ввиду увеличенной осадки не всегда могут подойти для стоянки к неизвестному и недооборудованному берегу и зайти в мелководный залив из опасения повредить крылья на малой глубине, но на полном ходу они имеют малую осадку и могут преодолевать мелководье. Моторная лодка на крыльях дли-пой 4—5 м обычно преодолевает волну высотой 0,2 м, а катер длиной 8—9 м — 0,4 м.
2. Инерция
Любое судно после выключения двигателя не сразу останавливается, а некоторое время продолжает двигаться по инерции.
Инерция как маневренный элемент судна характеризуется временем и расстоянием, которое пройдет судно от момента изменения режима работы двигателя до момента установления нового состояния движения судна.
Инерционные характеристики судна необходимо знать и учитывать при швартовке, расхождении, шлюзовании, постановке на якорь и т. д.
Инерционные характеристики своего судна судоводитель может установить опытным путем во время практического плавания. Нужно знать расстояние, проходимое судном после переключения хода с полного на стоп, со среднего на стоп и т. д., время от момента выключения двигателя до полной остановки судна, какие расстояния проходит судно в прежнем направлении после изменения ходов с переднего на задний, с заднего на передний и т. д.
В частности во внимание принимаются максимальные инерционные характеристики и конкретно выбег или свободное движение судна по инерции, проходимое после остановки двигателей, когда инерция гасится только за счет силы сопротивления воды. Выбег для глиссирующих мотолодок и катеров не превышает 50 м, а для катеров на подводных крыльях — 120 м.
Активное торможение производится путем реверса двигателей для гашения инерции движения работой двигателей на задний ход до величины, соответствующей остановке судна относительно (дна) берега.
Активное торможение совершается чаще всего экстренно при угрожающих судну обстоятельствах.
На речном флоте 30% аварий происходит из-за неправильного маневрирования, связанного с недостаточным знанием судоводителями маневренных характеристик флота, что в полной мере относится и к инерционным характеристикам судов в реальных путевых условиях *.
Полезно не только гонщикам! Как сила инерции влияет на скорость автомобиля?


При дискуссиях о весе автомобиля всегда надо помнить о силе инерции вращающихся масс. Для инженеров это достаточно известное понятие. Используя математические методы можно рассчитать влияния инерции на вес, а, соответственно, и скорость автомобиля.Во время ускорения силы инерции воздействуют на вес автомобиля. Для болида нужно добавить 10% веса автомобиля, чтобы учесть вращающиеся массы.
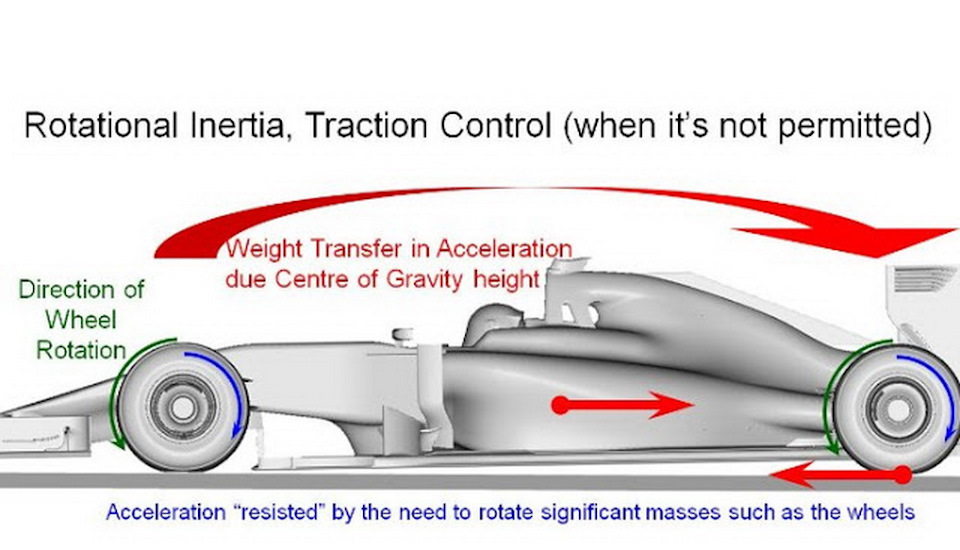
Любой расчет подлежит практической проверке. Если при вычислениях не учесть инерцию вращающихся масс, то реальное ускорение окажется меньше расчетного. Автомобиль будет набрать обороты медленнее, чем он мог бы это делать с имеющейся у него мощностью двигателя и весом. Все что начинает двигаться требует ускорения в том направлении, которое задано, включая вращение.
Для большинства автомобилей вращающиеся массы в значительной степени являются неизменными (колеса, тормозные диски, карданные валы, дифференциалы и пр.). Они как бы увеличивают вес автомобиля, делают его более тяжелым. Если катиться накатом вниз без приложения усилий, то автомобиль тоже ведет себя как более тяжелый.
Инерция вращающихся масс изменяется линейно.
Вращение деталей двигателя (и коробки передач) отличается на различных этапах. Скорость вращения зависит от передачи. На первой передаче двигатель должен разгоняться до высоких оборотов в небольшом диапазоне числа оборотов, поэтому инерция вращающихся масс здесь оказывает большее влияние, чем на высшей передаче.
Инерция вращающихся масс помогает при переключении передач (например, со 2-й на 3-ю). Если переключение передачи произойдет быстро, то автомобиль благодаря силе инерции легко справляется с «импульсом» неожиданного снижения числа оборотов двигателя к тем, которые соответствуют этой же скорости автомобиля на более высокой передаче. Но здесь надо побеспокоиться о надежности.
Когда ускорение автомобиля ограничено пробуксовкой, мощность двигателя поможет преодолеть силу инерции вращающихся деталей трансмиссии, однако, неведущие колеса будут замедлять ускорение.
В 80-х годах в некоторых командах Ф-1начались работы по моделированию времени прохождения болидом круга. Возник вопрос о влиянии силы инерции на различные части автомобиля. Однако, в то время этот вид технической информации был недоступен.
По таким причинам, как сокращение затрат и запрещение применение непривычных материалов (которые не будут использоваться в дорожных автомобилях), регламент вынуждает производителей двигателей Ф-1 делать их относительно тяжелыми по сравнению с теми, которые можно создать. Хотя двигатели Ф-1, все равно, гораздо легче двигателей дорожных автомобилей.
В прошлом установка ограничителей оборотов двигателя, чтоб не допустить превышение нормы, стола проблемой для некоторых силовых агрегатов Ф-1 (тогда инженеры имели меньше знаний, но больше свободы). Простое (грубое) устройство по ограничению оборотов прекращало подачу искры к определенным цилиндрам, когда скорость вращения коленвала превышала разрешенную, до тех пор, пока число оборотов не становилось ниже критического уровня.
У легкого двигателя достаточно было одного поршня, создающего более высокие обороты при ненагруженном двигателе, чтобы направить двигатель в «красную зону». Поэтому инженеры изобрели инструменты, чтобы ограничить ускорение двигателя. Такая защита была принята создателями регламента и использовалась в гонках. Были применены эффективная установка угла опережения зажигания, снижение искрообразования и т.п. Двигатель стал представлять более тяжелый агрегат. Тогда вес не учитывался вместе с весом автомобиля. И все же движущиеся части автомобиля были достаточно легкими.
Затем инженеры стали задумываться не только об ограничении ускорения двигателя. Возникла идея об управлении сцеплением шин с дорогой на первой передаче. С помощью пилота регулируется необходимая степень ускорения. Используется 1-я передача, потому что ускорение на первой переде будет действительно медленным, если на 2-й передаче будет настроено ограничение ускорения.
Пилоты 90-х годов жаловались на неудобства. Они хотели, чтобы они использовали 2-ю или лучше 3-ю передачу, где они могли бы управлять сцеплением шин с дорогой, хотя теоретически это было невозможно.
Почему это так происходит, поясняется следующим. На одной из гонок инженеры столкнулись с проблемой большого пропуска зажигания на трассе. Инженеры впустую проверяли электронику, провода, свечи зажигания. Но в действительности причиной стало прогорание поршней. Почему же это произошло.
Тогда была механическая система впрыска очень простая по своей сути. Фиксированный объем топлива впрыскивается в двигатель во время каждого цикла (за два оборота коленвала). Объем топлива изменялся с помощью кулачка распределительного вала, который регулировал этот объем в зависимости от положения дроссельной заслонки и небольших изменен6ий числа оборотов. «Карты двигателя» применяемые на современных болидах, тогда были невозможны. Во время гонки к повышенному атмосферному давлению (была территория высокого давления) добавлялась низкая температура (гонка была ячной ночью). Эти два фвктора (высокое давление и низкая температура) увеличивали плотность воздуха, а двигатель с его ограниченным потоком топлива вращался слишком медленно. Это и явилось причиной поломок.
Карбюраторы могут справляться с этой проблемой легче, чем ранние системы впрыска топлива, если те были плохо отрегулированы. Необходимость реагировать на чрезмерное изменение плотности воздуха является хорошо понятной проблемой для двигателей дорожных автомобилей. Они должны одинаково хорошо работать на большой высоте относительно уровня моря, в различных условиях жаркого и холодного климата.
Двигатели Ф-1 также должны быть отрегулированы (топливо, воспламенение) в зависимости от окружающей среды. Сегодня лямбда-зонд (датчик количества кислорода в отработавших газах) используется совместно с электронной системой впрыска топлива, чтобы замерить содержание топливно-воздушной смеси после сгорания.
Даже с механической системой, чтобы препятствовать тому, что произошло (прогорание поршней) необходимо настроить карту двигателя, базирующуюся на измерении температуры и давлении воздуха, поступающего в двигатель (что влияет на плотность воздуха). В идеале также нужно измерить влажность и температуру топлива. Поскольку разрешено замерять атмосферное давление, то имеется все необходимое, чтобы определять предел ускорения оборотов двигателя на любой передаче.
Это делается так. Датчик атмосферного давления должен измерять давление внутри воздухозаборника, потому, что это тот воздух, который засасывает двигатель. Воздухозаборник тщательно сконструирован таким образом, чтобы в полной мере воспользоваться скоростным движением болида вперед и захватить как можно больше воздуха. Тем самым увеличивается плотность воздуха.
Не разрешены датчики, которые могли бы сообщать блоку управления двигателем (ECU) на какой передаче двигается автомобиль. Тем не менее, при испытаниях на трассе можно использовать зависимость изменения давления в воздухозаборнике от скорости автомобиля, чтобы установить передачу. Если давление при движении на «Х» выше уровня окружающей среды, которое было на старте, значит автомобиль вероятно на такой-то передаче. Процесс можно усовершенствовать. Надо знать обороты двигателя (просто другой его параметр). Это быстрый контроль тяговых усилий.
Большая Энциклопедия Нефти и Газа
Момент — инерция — двигатель
Кратность момента инерции механизма главного привода к моменту инерции двигателя составляет от Мжш % для токаР — ных станков до J / J 3 — 5 — 5 для сверлильных. Поэтому время переходных процессов относительно велико. Однако его можно значительно снизить при пуске с повышенным напряжением на якоре и обеспечении прямоугольной диаграммы тока во всем диапазоне изменения частоты вращения. Поэтому преобразователи в якорном канале для приводов главного движения должны иметь большой запас по напряжению, для них больше всего подходят двигатели с низким номинальным напряжением якоря — 110, 220, 340 В. [16]
Момент инерции насосного агрегата пожарного автомобиля складывается из момента инерции двигателя , рабочего колеса насоса, вала и трансмиссии. [17]
Параметрами такой системы являются следующие величины: J — момент инерции двигателя и нагрузки, приведенный к выходному валу; Mv — коэффициент вязкого трения, приведенный к выходному валу; Мн — момент внешней нагрузки; Мдр — вращающий момент на валу двигателя; i — передаточное число редуктора; Qex-Qeblx — угол рассогласования; Мтр — момент сухого трения, приведенный к выходному валу. [18]
Так как в расчет введены приведенные значения демпфирования и момента инерции двигателя , то общая требуемая мощность является функцией передаточного числа. Описанные ниже приемы позволяют проверить, может ли двигатель развить указанную выше мощность PL и одновременно определить оптимальное передаточное число. Момент двигателя Т, соответствующий скорости v, может быть определен из кривой характеристики скорость — момент. [20]
Рабочие характеристики снимают при различных сочетаниях включаемых обмоток, моментах инерции двигателя и нагрузки и пр. [21]
Если зазоры относительно невелики и приведенный момент инерции не превышает момента инерции двигателя ( — у е 2), специального формирования плавного выбора зазоров обычно не требуется. При этом удовлетворительная плавность выбора зазоров обеспечивается формированием оптимальной зависимости М f ( t) с ограниченной производной и максимальным значением. [22]
При вычислении суммарного приведенного момента инерции привода следует учесть, что моменты инерции двигателя и шкива трения суммируются непосредственно, поскольку они находятся на одном валу. Моменты инерции направляющих шкивов необходимо привести к валу двигателя, так как скорости их различны. Кроме того, должен быть прибавлен приведенный момент инерции масс, движущихся поступательно. [23]
Нм; / — момент инерции привода, включающий в себя момент инерции двигателя JaB и приведенный к валу двигателя момент инерции механизма / пр ( см. разд. [25]
Следует отметить, что конвейеры принадлежат к инерционным механизмам, в которых момент инерции двигателя составляет лишь ( 0 03 — 0 1) JK, где JK — суммарный момент инерции конвейера. [27]
При определении момента инерции, приведенного к скорости вала двигателя, следует учитывать моменты инерции двигателя , всех звеньев передачи, а также момент инерции исполнительного механизма. Для приведения моментов инерции звеньев привода к скорости вала двигателя заменяют действительную систему, содержащую все перечисленные звенья, условной эквивалентной системой, состоящей из одного звена. Такая замена правомерна лишь в том случае, если запасы кинетической энергии действительной и эквивалентной систем равны. [28]
Время пуска и торможения такого привода с приведенным моментом инерции механизма, равным моменту инерции двигателя , не должно превышать 0 1 с. Привод должен обеспечивать позиционирование с точностью до 1 мкм за секунду. Жесткие требования выдвигаются также к равномерности перемещений на пониженных скоростях. [29]
В работе [107] рассматривается частный случай оптимальной следящей системы, в которой можно пренебречь моментом инерции двигателя и моментом нагрузки на выходном валу. Для вывода расчетных формул и иллюстрации движения системы используется энергетическая плоскость. [30]
Горизонтально-оппозитные двигатели
Subaru Boxer
Горизонтально-оппозитные двигатели
- При горизонтальном расположении цилиндров друг против друга силы инерции, возникающие при движении поршней, взаимно гасятся. Благодаря чему, двигатель обладает хорошей уравновешенностью и низким уровнем вибраций.
- Невысокий уровень вибраций позволяет обойтись противовесами небольшой массы и не устанавливать уравновешивающие валы. В результате двигатель расходует меньше топлива и обладает лучшей отзывчивостью.
- Инерция относительно вертикальной оси автомобиля меньше, что повышает быстроту реакции на управление.
- Небольшая высота двигателя и низкое положение центра тяжести дополнительно улучшают быстроту реакции и повышают устойчивость автомобиля.
- Возможность получения большого диаметра цилиндров облегчает создание высокооборотистых двигателей для спортивных автомобилей.
- Конструкция горизонтально-оппозитного двигателя обладает большей жесткостью, что позволяет уменьшить механические потери при работе двигателя. Благодаря этому увеличивается ресурс двигателя.
Рядные двигатели
- Самая распространенная компоновка для двигателей небольшого рабочего объема, поскольку при ней легче сконструировать головку блока цилиндров.
- При увеличении числа цилиндров двигатель становится длиннее.
- Для уменьшения вибрации требуется установка на коленчатый вал тяжелых противовесов.
- Из-за недостаточной уравновешенности при вращении требуется применение уравновешивающих валов, что ухудшает приемистость.
- При продольной установке трудно выделить пространство для зон деформации, защищающих во время столкновения. По этой причине такие двигатели часто устанавливают поперечно.
V-образные двигатели
- Габаритная длина такого двигателя меньше, чем рядного двигателя с таким же числом цилиндров. Благодаря компактности подобная компоновка обычно используется для многоцилиндровых (6, 8, 10 и т.д. цилиндров) двигателей большого рабочего объема.
- Небольшая габаритная длина дает преимущество для обеспечения зон деформации. Это также удобно в случае установки многоцилиндровых двигателей.
- Меньше инерция относительно вертикальной оси автомобиля, что повышает быстроту реакции на управление.
- Более сложная конструкция такого двигателя.
- Подобная компоновка не столь выгодна для двигателей малого рабочего объема.
- Из-за достаточно высокой вибронагруженности требуется применение уравновешивающих валов.
- Высокий центр тяжести вызывает чрезмерный крен кузова в поворотах.
Безопасность
В случае серьезного фронтального столкновения плоский оппозитный двигатель легче направляется под днище автомобиля, уменьшая тем самым энергию удара, передаваемую на пассажирский салон.
Оппозитный двигатель имеет плоскую форму, оставляя пространство между твердыми деталями двигателя и сравнительно мягким капотом. Это позволяет эффективнее поглотить энергию удара при наезде на пешехода.
Удовольствие от вождения
Легкий двигатель из алюминиевого сплава имеет низкий центр тяжести, что обеспечивает небольшую инерцию относительно продольной оси автомобиля и малые крены.
Низкий центр тяжести и продольное расположение короткого двигателя позволяют в повороте уменьшить не только крены, но и момент инерции относительно вертикальной оси автомобиля, что положительно сказывается на поворачиваемости.
Когда водитель поворачивает рулевое колесо для изменения направления движения, центр вращения автомобиля располагается ближе к его задней части. Для автомобилей равной массы, меньшее расстояние от центра вращения до центра тяжести означает более легкое осуществление поворота. Вот почему предпочтительна компоновка с низко расположенным двигателем и продольно состыкованной с ним коробкой передач.
В противоположность крену, который является естественным следствием выполнения поворота, перемещение, вызываемое поворотом рулевого колеса, может быть принято за активное движение, поскольку оно задается водителем. В примере с метрономом такое активное движение аналогично тому, что вы останавливаете пальцем маятник метронома и толкаете его в обратном направлении. Если грузик маятника находится в нижнем положении, вам потребуется меньшее усилие для того, чтобы толкнуть его в другую сторону.