
Применение цилиндрического линейного асинхронного двигателя в электроприводе масляного выключателя вмп-10
Применение цилиндрического линейного асинхронного двигателя в электроприводе масляного выключателя вмп-10
Н.П.Кондратьева, И.Р. Владыкин, В.А.Баженов
В статье обоснована актуальность повышения эффективности работы электропривода масляного выключателя в сельских электрических сетях за счет использования цилиндрического линейного асинхронного электродвигателя. Приведены результаты эксплуатационных данные об аварийных перерывах электроснабжения в сельских распределительных сетях 6…35 кВ, которые подтверждают экономическую целесообразность применения цилиндрических линейных асинхронных электродвигателей.
Ключевые слова: Цилиндрический линейный асинхронный электродвигатель, выключатель масляный, электропривод, повышение эффективности работы.
Ключевые слова:
С переводом сельскохозяйственного производства на промышленную основу существенно повышаются требования к уровню надёжности электроснабжения.
Целевая комплексная программа повышения надёжности электроснабжения сельскохозяйственных потребителей предусматривает широкое внедрение средств автоматизации сельских распределительных сетей 0,4…35 кВ, как одно из наиболее эффективных способов достижения этой цели. Программа включает в себя оснащение распределительных сетей современной коммутационной аппаратурой и приводными устройствами к ним. Наряду с этим предполагается широкое использование, особенно на первом этапе, первичной коммутационной аппаратуры, находящейся в эксплуатации [1]
В настоящее время распространено применение в сельских сетях масляных выключателей (ВМ) с пружинными и пружинно-грузовыми приводами. Однако, из опыта эксплуатации известно, что приводы ВМ являются одним из наименее надёжных элементов распределительных устройств. Это снижает эффективность комплексной автоматизации сельских электрических сетей. Например, отмечается, что 30…35% случаев действия релейной защиты и автоматики (РЗА) не реализуется из-за неудовлетворительного состояния приводов [2]. Причём до 85% дефектов приходится на долю ВМ 10…35 кВ с пружинно-грузовыми приводами. По данным некоторых авторов 59,3% отказов автоматического повторного включения (АПВ) на базе пружинных приводов происходит из-за блок- контактов привода и выключателя, 28,9% из-за механизмов включения привода и удержания его во включённом положении [3]. О неудовлетворительном состоянии и необходимости модернизации и разработки надёжных приводов отмечается в работах [4,5,6].
Имеется положительный опыт применения более надёжных электромагнитных приводов постоянного тока для ВМ 10 кВ [2] на понижающих подстанциях сельскохозяйственного назначения. Однако в силу ряда особенностей эти приводы не нашли широкого применения. В частности, оперативным током для привода ПЭ-11 является постоянный род тока от аккумуляторных батарей большой емкости, зарядное и выпрямительное устройство для поддержания работоспособности батарей мощностью около 100 кВА.
В процессе исследований нами был проведен сбор статических данных по дефектам и отказам приводов ВМ проведён по четырём районам электрических сетей. В качестве источника сведений о типе, сроке службы и количестве установленного оборудования использовались технические паспорта подстанций 35-110/6-10 кВ. Сведения о работе устройства РЗА получены по отчётам службы релейной защиты и автоматики приведены в таблице 1.
Таблица 1. Эксплуатационные данные об аварийных перерывах электроснабжения в сельских распределительных сетях 6…35 кВ СВЭС за пять лет.
Кол-во перерывов.
Длит. перерыва, час
Недоотпуск эл. энергии при перерыве, тыс. кВт×ч
Системы частотного регулирования с линейными электродвигателями
Frequency control systems with linear motors
Разнообразие линейных электродвигателей столь же велико, как и электрических машин с вращающимся ротором. Наиболее просты по конструкции линейные трехфазные асинхронные двигатели, в которых поступательное движение рабочего органа происходит под действием «бегущего» поля индуктора.
Если индуктор выполнен в виде цилиндра, а внутри него находится токопроводящая жидкая среда, то цилиндрический линейный асинхронный двигатель (ЛАД) может работать в качестве насоса.
Регулирование производительности такого насоса осуществляется изменением частоты тока индуктора и, соответственно, скорости движения магнитного поля.
Особенности частотного регулирования МГД-насоса обусловлены конструкцией цилиндрического линейного асинхронного двигателя, в том числе краевыми эффектами и большими потоками рассеивания. Коэффициент мощности таких двигателей значительно ниже, чем у обычных электрических машин, и может составлять 0,3 – 0,4.
Система управления линейным электродвигателем строится на базе преобразователя частоты обычной конструкции, но со специальным программным обеспечением. Для оптимизации рабочих характеристик ЛАД может потребоваться раздельное и независимое управление выходной частотой преобразователя и выходным напряжением.
Диапазон частот двигателя МГД-насоса определяется требуемым напором и может достигать 200 Гц и выше.
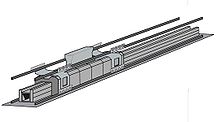
Ниже показано оборудование системы частотного регулирования цилиндрического линейного асинхронного двигателя на базе преобразователя частоты Vacon NXP. Рабочие параметры — Uл=380 В, Iл=180 А, f=200 Гц, Cosφ=0,2.

Пример оборудования СЧР линейного асинхронного двигателя.
Управление преобразователем частоты выполняется с поста местного или дистанционного управления. Контроль работы привода, измерение и регистрация параметров выполняются штатным сервисным программным обеспечением NCDrive, установленным на персональном компьютере.

Пример переходных процессов линейного асинхронного двигателя при изменении частоты от 0 до 200 Гц.
Частота ШИМ выходного напряжения может изменяться в широком диапазоне (от 1 кГц до 12 кГц).

Форма напряжения и тока линейного асинхронного двигателя (дискретность считывания – 1 миллисекунда).
Предложения Инженерного центра «АРТ» по системам частотного регулирования с линейными электродвигателями.
Полный комплекс работ по созданию систем частотного регулирования для линейных электродвигателей, включая:
- разработку проектно-сметной документации, программного обеспечения;
- поставку оборудования и материалов;
- выполнение монтажных и пусконаладочных работ;
- организацию технического обслуживания.
Линейный асинхронный двигатель — Linear induction motor


А линейный асинхронный двигатель (LIM) является переменный ток (AC), асинхронный линейный двигатель который работает по тем же общим принципам, что и другие асинхронные двигатели но обычно предназначен для прямого создания движения по прямой линии. Как правило, линейные асинхронные двигатели имеют конечную длину первичной или вторичной обмотки, что создает конечные эффекты, тогда как обычный асинхронный двигатель расположен в бесконечной петле. [1]
Несмотря на свое название, не все линейные асинхронные двигатели производят линейное движение; некоторые линейные асинхронные двигатели используются для вращения большого диаметра, где использование непрерывной первичной обмотки было бы очень дорогостоящим.
Как и роторные двигатели, линейные двигатели часто работают от трехфазного источника питания и могут поддерживать очень высокие скорости. Однако есть конечные эффекты, которые уменьшают силу двигателя, и часто невозможно установить коробку передач, чтобы сбалансировать силу и скорость. Таким образом, линейные асинхронные двигатели часто менее энергоэффективны, чем обычные роторные двигатели для любой заданной требуемой выходной силы.
LIM, в отличие от своих вращающихся аналогов, может давать эффект левитации. Поэтому они часто используются там, где требуется бесконтактное усилие, где требуются низкие эксплуатационные расходы или где рабочий цикл невелик. Их практическое использование включает Магнитная левитация, линейные двигатели и линейные приводы. Они также использовались для перекачки жидких металлов. [2]
Содержание
- 1 История
- 2 строительство
- 3 Принципы
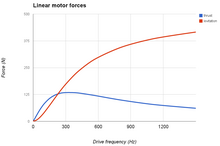
- 4 Силы
- 4.1 Толкать
- 4.2 Конечный эффект
- 4.3 Левитация
- 5 Спектакль
- 6 Использует
- 7 Смотрите также
- 8 Рекомендации
История
История линейных электродвигателей восходит как минимум к 1840-м годам до работы Чарльз Уитстон в Королевский колледж В Лондоне, [3] но модель Уитстона была слишком неэффективной, чтобы быть практичной. Возможный линейный асинхронный двигатель описан в патенте США 782312 (1905; изобретатель Альфред Цеден из Франкфурта-на-Майне) и предназначен для приведения в движение поездов или лифтов. Немецкий инженер Герман Кемпер Построен рабочий образец в 1935 году. [4] В конце 1940-х гг. Эрик Лэйтуэйт из Имперский колледж в Лондон разработана первая полноразмерная рабочая модель.

В одностороннем варианте магнитное поле может создавать силы отталкивания, которые отталкивают проводник от статора, левитируя его и неся в направлении движущегося магнитного поля. Лэйтуэйт назвал более поздние версии магнитная река. Эти версии линейного асинхронного двигателя используют принцип, называемый поперечный поток где два противоположных полюса поставлены рядом. Это позволяет использовать очень длинные опоры и, таким образом, обеспечивает высокую скорость и эффективность. [5]
строительство
Первичная обмотка линейного электродвигателя обычно состоит из плоского магнитного сердечника (обычно ламинированного) с поперечными пазами, которые часто имеют прямой разрез. [6] с катушками, уложенными в прорези, причем каждая фаза имеет чередующуюся полярность, так что разные фазы физически перекрываются.
Вторичное часто представляет собой лист из алюминия, часто с железным опорной плитой. Некоторые модули LIM являются двухсторонними, с одной первичной обмоткой на каждой стороне вторичной, и в этом случае железная подкладка не требуется.
Существует два типа линейных двигателей: короткие начальные, где катушки усечены короче, чем вторичная, и короткое среднее, где токопроводящая пластина меньше. Короткие вторичные модули LIM часто наматываются как параллельные соединения между катушками одной и той же фазы, тогда как короткие первичные обмотки обычно наматываются последовательно. [7]
Первичные обмотки ЛАД с поперечным потоком имеют ряд сдвоенных полюсов, расположенных бок о бок в поперечном направлении с противоположными направлениями намотки. Эти полюса, как правило, производится либо с соответствующим образом вырезать пластины ламинированной подложки или серией поперечных U-образные сердечники.
Принципы

В этой конструкции электродвигателя сила создается линейно движущимся магнитное поле действуя на проводников в полевых условиях. Любой проводник, будь то петля, катушка или просто кусок металлической пластины, помещенный в это поле, будет иметь вихревые токи индуцированный в нем создавая противоположное магнитное поле в соответствии с Закон Ленца. Два противоположных поля будут отталкивать друг друга, создавая движение, когда магнитное поле пронизывает металл.
п s = 2 ж s / п < displaystyle n_ = 2f_ / p>  [8]
[8]
где жs частота питающей сети в Гц, п — количество полюсов, а пs — синхронная скорость магнитного поля в оборотах в секунду.
Картина бегущего поля имеет скорость:
v s = 2 т ж s < displaystyle v_ = 2tf_ > [8]
где vs — скорость линейного бегущего поля в м / с, а т — полюсный шаг.
За промах s , скорость вторичной обмотки линейного двигателя определяется выражением
v р = ( 1 − s ) v s < displaystyle v_ > [8]
Толкать

Привод, создаваемый линейными асинхронными двигателями, в чем-то похож на обычные асинхронные двигатели; движущие силы демонстрируют примерно аналогичную характеристическую форму относительно скольжения, хотя и модулируемую концевыми эффектами. [9]
Существуют уравнения для расчета тяги двигателя. [10]
Конечный эффект
В отличие от асинхронного двигателя круглого сечения, линейный асинхронный двигатель демонстрирует «конечные эффекты». Эти конечные эффекты включают в себя потери производительности и эффективности, которые, как считается, вызваны уносом магнитной энергии и потерями в конце первичной обмотки из-за относительного движения первичной и вторичной обмоток.
С короткой вторичной обмоткой поведение почти идентично роторной машине, при условии, что она имеет длину как минимум два полюса, но с коротким первичным снижением тяги, которое происходит при малом скольжении (ниже примерно 0,3), пока оно не станет восьми полюсов или больше. [7]
Однако из-за концевых эффектов линейные двигатели не могут «работать налегке» — обычные асинхронные двигатели могут работать с двигателем с почти синхронным полем в условиях низкой нагрузки. Напротив, конечные эффекты создают гораздо более значительные потери с линейными двигателями. [7]
Левитация
Кроме того, в отличие от роторного двигателя, электродинамическая левитация сила, она равна нулю при нулевом скольжении и дает примерно постоянную величину силы / зазора, когда скольжение увеличивается в любом направлении. Это происходит в односторонних двигателях, и левитация обычно не происходит, когда на вторичной обмотке используется железная опорная пластина, поскольку это вызывает притяжение, которое подавляет подъемную силу. [9]
Спектакль
Линейные асинхронные двигатели часто менее эффективны, чем обычные роторные асинхронные двигатели; Концевые эффекты и часто присутствующий относительно большой воздушный зазор обычно уменьшают силы, возникающие при той же самой электрической мощности. [1] Аналогичным образом, эффективность во время работы генератора (электрическое торможение / рекуперация) с линейным асинхронным двигателем была отмечена как относительно низкая из-за конечных эффектов. [11] Большой воздушный зазор также увеличивает индуктивность двигателя, что может потребовать больших и более дорогих конденсаторов.
Однако линейные асинхронные двигатели могут избавить от необходимости в коробках передач и аналогичных трансмиссиях, и они имеют свои собственные потери; и практическое знание важности фактор доброты может минимизировать влияние большего воздушного зазора. В любом случае потребление энергии не всегда является самым важным соображением. Например, во многих случаях линейные асинхронные двигатели имеют гораздо меньше движущихся частей и требуют очень низкого обслуживания. Кроме того, использование линейных асинхронных двигателей вместо вращающихся двигателей с поворотно-линейной передачей в управления движением систем, обеспечивает более высокую пропускную способность и точность система контроля, потому что поворотно-линейные передачи вносят люфт, статическое трение и / или механическую податливость в систему управления.
Использует

Благодаря этим свойствам линейные двигатели часто используются в маглев движитель, как у японцев Линимо поезд на магнитной подушке линия рядом Нагоя.

Первая в мире коммерческая автоматизированная магнитолевая система была низкоскоростной шаттл на магнитной подвеске который бежал от терминала аэропорта Бирмингем аэропорт к ближайшему Бирмингемский международный железнодорожный вокзал между 1984–1995 гг. [12] Длина пути составляла 600 метров (2000 футов), а поезда «летели» на высоте 15 миллиметров (0,59 дюйма), левитировали с помощью электромагнитов и приводились в движение линейными асинхронными двигателями. [13] Он проработал почти одиннадцать лет, но устаревание проблемы с электронными системами сделали его ненадежным в последние годы. Один из оригинальных автомобилей выставлен на выставке Railworld в Питерборовместе с RTV31 парящий поезд. [14]
Однако линейные двигатели использовались независимо от магнитной левитации, такие как Токиос Toei Ōedo Line. В Bombardier Innovia Metro представляет собой пример автоматизированной системы, в которой используется движитель LIM. Самый длинный быстрый транзит система, использующая такую технологию, является Метро Гуанчжоу, примерно 130 км (81 миль) маршрута с использованием поездов метро LIM вдоль Строка 4, Строка 5 и Строка 6. Они также используются Tomorrowland Transit Authority PeopleMover в Tomorrowland в волшебное королевство в Мир Уолта Диснея в Bay Lake, Флорида только за пределами Орландо, Флорида.
Технология линейных асинхронных двигателей также используется в некоторых запущенные американские горки. В настоящее время это все еще непрактично для уличного бега трамваи, хотя теоретически это можно сделать, закопав его в прорези.

За пределами общественного транспорта вертикальные линейные двигатели были предложены в качестве подъемных механизмов в глубоких шахты, и использование линейных двигателей растет в управления движением Приложения. Они также часто используются на раздвижных дверях, например, в низкий этаж трамваи такой как Alstom Citadis и Евротрам.
Также существуют двухосные линейные двигатели. Эти специализированные устройства использовались для прямого Икс—Y движение для точной лазерной резки ткани и листового металла, автоматизированное составление, и формирование кабеля. Кроме того, линейные асинхронные двигатели с цилиндрической вторичной обмоткой использовались для обеспечения одновременного линейного и вращательного движения для монтажа электронных устройств на печатных платах. [15]
Большинство используемых линейных двигателей — это LIM (линейные асинхронные двигатели) или LSM (линейные синхронные двигатели). Линейные двигатели постоянного тока не используются, поскольку они более дорогостоящие и линейные. SRM страдает плохой тягой. Таким образом, для длительных пробегов на тяговых усилиях предпочтительнее использовать LIM, а для краткосрочных — LSM.
Линейные асинхронные двигатели также использовались для запуска самолетов Westinghouse Electropult. [7] система в 1945 году была ранним примером, и Электромагнитная система запуска самолета (EMALS) должна была быть поставлена в 2010 году.
Линейные асинхронные двигатели также используются в ткацких станках, магнитная левитация позволяет бобинам плавать между волокнами без прямого контакта.
Первый безканальный лифт изобретен ThyssenKrupp использует мощность линейного индукционного привода. [16]
Линейный асинхронный двигатель
Линейный асинхронный двигатель ( LIM ) представляет собой переменный ток (переменный ток), асинхронный линейный двигатель , который работает по тем же принципам, что и общих других асинхронных двигателей , но , как правило , предназначены для непосредственного движения производят по прямой линии. Как правило, линейные асинхронные двигатели имеют конечную длину первичной или вторичной обмотки, что создает конечные эффекты, тогда как обычный асинхронный двигатель расположен в бесконечной петле. [1]
Несмотря на свое название, не все линейные асинхронные двигатели производят линейное движение; некоторые линейные асинхронные двигатели используются для вращения большого диаметра, где использование непрерывной первичной обмотки было бы очень дорогостоящим.
Как и роторные двигатели, линейные двигатели часто работают от трехфазного источника питания и могут поддерживать очень высокие скорости. Однако есть конечные эффекты, которые уменьшают силу двигателя, и часто невозможно установить коробку передач, чтобы сбалансировать силу и скорость. Таким образом, линейные асинхронные двигатели часто менее энергоэффективны, чем обычные роторные двигатели для любой заданной требуемой выходной силы.
LIM, в отличие от своих вращающихся аналогов, может давать эффект левитации. Поэтому они часто используются там, где требуется бесконтактное усилие, где требуются низкие эксплуатационные расходы или где рабочий цикл невелик. Их практическое использование включает магнитную левитацию , линейные двигатели и линейные приводы. Они также использовались для перекачки жидких металлов. [2]
Содержание
- 1 История
- 2 Строительство
- 3 Принципы
- 4 Силы
- 4.1 Тяга
- 4.2 Конечный эффект
- 4.3 Левитация
- 5 Производительность
- 6 применений
- 7 См. Также
- 8 ссылки
История [ править ]
Историю линейных электродвигателей можно проследить, по крайней мере, с 1840-х годов до работы Чарльза Уитстона в Королевском колледже в Лондоне [3], но модель Уитстона была слишком неэффективной, чтобы быть практичной. Возможный линейный асинхронный двигатель описан в патенте США 782312 (1905; изобретатель Альфред Цеден из Франкфурта-на-Майне) и предназначен для приведения в движение поездов или лифтов. Немецкий инженер Герман Кемпер построил рабочую модель в 1935 году. [4] В конце 1940-х годов профессор Эрик Лейтвейт из Имперского колледжа в Лондоне разработал первую полноразмерную рабочую модель.
В одностороннем варианте магнитное поле может создавать силы отталкивания, которые отталкивают проводник от статора, левитируя его и неся вдоль направления движущегося магнитного поля. Лэйтуэйт назвал более поздние версии магнитной рекой . В этих версиях линейного асинхронного двигателя используется принцип, называемый поперечным потоком, при котором два противоположных полюса размещаются рядом. Это позволяет использовать очень длинные опоры и, таким образом, обеспечивает высокую скорость и эффективность. [5]
Строительство [ править ]
Первичная обмотка линейного электродвигателя обычно состоит из плоского магнитного сердечника (обычно ламинированного) с поперечными прорезями, которые часто имеют прямой разрез [6] с катушками, уложенными в прорези, причем каждая фаза имеет переменную полярность, так что разные фазы физически перекрываются.
Вторичное часто представляет собой лист из алюминия, часто с железным опорной плитой. Некоторые модули LIM являются двухсторонними, с одной первичной обмоткой на каждой стороне вторичной, и в этом случае железная подкладка не требуется.
Существует два типа линейных двигателей: короткая первичная обмотка , где катушки усечены короче вторичной обмотки, и короткая вторичная обмотка , где проводящая пластина меньше. Короткие вторичные модули LIM часто наматываются как параллельные соединения между катушками одной и той же фазы, тогда как короткие первичные обмотки обычно наматываются последовательно. [7]
Первичные обмотки ЛАД с поперечным потоком имеют серию сдвоенных полюсов, расположенных бок о бок в поперечном направлении с противоположными направлениями намотки. Эти полюса, как правило, производится либо с соответствующим образом вырезать пластины ламинированной подложки или серией поперечных U-образные сердечники.
Принципы [ править ]
В этой конструкции электродвигателя сила создается линейно движущимся магнитным полем, действующим на проводники в поле. Любой проводник, будь то петля, катушка или просто кусок металлической пластины, помещенный в это поле, будет иметь вихревые токи, индуцированные в нем, таким образом создавая противоположное магнитное поле в соответствии с законом Ленца . Два противоположных поля будут отталкивать друг друга, создавая движение, когда магнитное поле пронизывает металл.
п s знак равно 2 ж s / п /p>  [8]
[8]
где f s — частота питающей сети в Гц, p — число полюсов, а n s — синхронная скорость магнитного поля в оборотах в секунду.
Картина бегущего поля имеет скорость:
v s = 2 t f s >  [8]
[8]
где v s — скорость линейного бегущего поля в м / с, а t — шаг полюсов.
Для скольжения s скорость вторичной обмотки линейного двигателя определяется выражением
v r = ( 1 − s ) v s >  [8]
[8]
Силы [ править ]
Привод, создаваемый линейными асинхронными двигателями, в чем-то похож на обычные асинхронные двигатели; движущие силы демонстрируют примерно аналогичную характеристическую форму относительно скольжения, хотя и модулируются концевыми эффектами. [9]
Существуют уравнения для расчета тяги двигателя. [10]
Конечный эффект
В отличие от асинхронного двигателя круглого сечения, линейный асинхронный двигатель демонстрирует «конечные эффекты». Эти конечные эффекты включают в себя потери производительности и эффективности, которые, как считается, вызваны уносом магнитной энергии и потерями в конце первичной обмотки из-за относительного движения первичной и вторичной обмоток.
С короткой вторичной обмоткой поведение почти идентично роторной машине при условии, что она имеет длину не менее двух полюсов, но с коротким первичным уменьшением тяги, которое происходит при малом скольжении (ниже примерно 0,3), пока она не станет восьми полюсов или больше. [7]
Однако из-за концевых эффектов линейные двигатели не могут «работать налегке» — обычные асинхронные двигатели могут работать с двигателем с почти синхронным полем в условиях низкой нагрузки. Напротив, конечные эффекты создают гораздо более значительные потери с линейными двигателями. [7]
Левитация
Кроме того, в отличие от роторного двигателя, показана электродинамическая сила левитации , она равна нулю при нулевом скольжении и дает примерно постоянную величину силы / зазора при увеличении скольжения в любом направлении. Это происходит в односторонних двигателях, и левитация обычно не происходит, когда на вторичной обмотке используется железная опорная пластина, поскольку это вызывает притяжение, которое подавляет подъемную силу. [9]
Производительность [ править ]
Линейные асинхронные двигатели часто менее эффективны, чем обычные роторные асинхронные двигатели; Концевые эффекты и часто присутствующий относительно большой воздушный зазор обычно уменьшают силы, возникающие при той же самой электрической мощности. [1] Аналогичным образом, эффективность во время работы генератора (электрическое торможение / рекуперация) с линейным асинхронным двигателем была отмечена как относительно низкая из-за конечных эффектов. [11] Большой воздушный зазор также увеличивает индуктивность двигателя, что может потребовать больших и более дорогих конденсаторов.
Однако линейные асинхронные двигатели могут избавить от необходимости в коробках передач и аналогичных трансмиссиях, и они имеют свои собственные потери; а практическое знание важности фактора качества может минимизировать влияние большего воздушного зазора. В любом случае потребление энергии не всегда является самым важным соображением. Например, во многих случаях линейные асинхронные двигатели имеют гораздо меньше движущихся частей и требуют очень низкого обслуживания. Кроме того, использование линейных асинхронных двигателей вместо вращающихся двигателей с поворотно-линейной передачей в системах управления движением обеспечивает более широкую полосу пропускания и точность системы управления , поскольку поворотно-линейные передачи создают люфт, статическое трение и / или механическую податливость система управления.
Использует [ редактировать ]
Из — за этих свойств, линейные двигатели часто используются в магнитной подвеске в движение, как и в японской Linimo магнитной левитации поезда линии вблизи Нагоя .
Первой в мире коммерческой автоматизированной системой на магнитной подвеске был низкоскоростной шаттл на магнитной подвеске, который курсировал от терминала аэропорта Бирмингема до ближайшего международного железнодорожного вокзала Бирмингема в период с 1984 по 1995 год. [12] Длина пути составляла 600 метров (2000 футов), а поезда «летели» на высоте 15 миллиметров (0,59 дюйма), левитировали с помощью электромагнитов и приводились в движение линейными асинхронными двигателями. [13] Он находился в эксплуатации почти одиннадцать лет, но проблемы с устареванием электронных систем сделали его ненадежным в последующие годы. Один из оригинальных вагонов сейчас выставлен на выставке Railworld в Питерборо вместе сВертолет RTV31 . [14]
Однако линейные двигатели были использованы независимо от магнитной левитации, таких как Токио «s Линия Оэдо . Innovia Метро Бомбардье является примером автоматизированной системы , которая использует LIM движение вперед. Самая протяженная система скоростного транспорта , в которой используется такая технология, — это метро Гуанчжоу, протяженность которого составляет около 130 км (81 милю) с использованием передвижных поездов метро LIM вдоль линий 4 , 5 и 6 . Они также используются в Tomorrowland Transit Authority PeopleMover в Tomorrowland в Волшебном королевстве в Walt Disney World Resort вБэй-Лейк , Флорида, недалеко от Орландо , Флорида.
Линейные асинхронные двигатели также используются в некоторых американских горках . В настоящее время это все еще непрактично для уличных трамваев , хотя теоретически это можно сделать, закопав трамвай в канале с прорезями.
Помимо общественного транспорта, вертикальные линейные двигатели были предложены в качестве подъемных механизмов в глубоких шахтах , и использование линейных двигателей в приложениях управления движением растет . Они также часто используются на раздвижных дверях, например, в трамваях с низким полом, таких как Alstom Citadis и Eurotram .
Также существуют двухосные линейные двигатели. Эти специализированные устройства используются для обеспечения прямого движения по осям X — Y для точной лазерной резки ткани и листового металла, автоматизированного черчения и формирования кабеля. Кроме того, линейные асинхронные двигатели с цилиндрической вторичной обмоткой использовались для обеспечения одновременного линейного и вращательного движения для монтажа электронных устройств на печатных платах. [15]
Большинство используемых линейных двигателей — это LIM (линейные асинхронные двигатели) или LSM (линейные синхронные двигатели). Линейные двигатели постоянного тока не используются, поскольку они более дорогостоящие, а линейный SRM страдает от плохой тяги. Таким образом, для длительных пробегов на тяговых усилиях предпочтительнее использовать LIM, а для краткосрочных — LSM.
Линейные асинхронные двигатели также использовались для запуска самолетов, система Westinghouse Electropult [7] в 1945 году была ранним примером, а электромагнитная система запуска самолетов (EMALS) должна была быть поставлена в 2010 году.
Линейные асинхронные двигатели также используются в ткацких станках, магнитная левитация позволяет бобинам плавать между волокнами без прямого контакта.
Первый безканатный лифт, изобретенный ThyssenKrupp, использует линейный индукционный привод. [16]

