Высоковольтный частотно-регулируемый электропривод с рекуперативным торможением для мельницы-вентилятора
Высоковольтный частотно-регулируемый электропривод с рекуперативным торможением для мельницы-вентилятора
Иванцов В.В., к.т.н., доцент, заместитель генерального директора ЗАО «ЭРАСИБ»
Системы пылеприготовления (СПП) с мельницами-вентиляторами находят широкое применение на котлах энергоблоков, работающих на бурых и взрывоопасных углях, а также на фрезерном топливе. С помощью мельниц-вентиляторов (М-В) производится размол топлива, сушка топлива и транспорт готовой угольной пыли к горелкам котла. При этом система пылеприготовления должна обеспечить подготовку топлива высокого качества, гарантировать экономичность процесса сжигания топлива в заданных режимах работы котла, иметь высокую надежность и экономичность при минимальных капитальных и эксплуатационных затратах.
В настоящее время практическое применение находят системы пылеприготовления с мельницами-вентиляторами, имеющими постоянные обороты приводного вала. Однако такие системы имеют ряд недостатков, связанных с трудностями обеспечения высокого качества работы СПП при постоянных оборотах приводного вала М-В в условиях изменяющейся нагрузки котла и колебаний влажности исходного материала. Основным недостатком является несовершенство конструкции М-В как вентиляционной установки, связанное с совмещением размольной и вентиляционной функций в одном агрегате. В результате такого совмещения зависимость вентиляционной производительности М-В при постоянных оборотах приводного вала и изменении загрузки ее топливом происходит в нежелательном направлении, а именно, с увеличением расхода топлива через М-В существенно снижается вентиляционная производительность М-В, а уменьшение подаваемого топлива приводит к увеличению производительности М-В по газам. При постоянных оборотах вала М-В также затруднено регулирование сушильной производительности СПП при колебаниях влажности исходного топлива, что связано с трудностями изменения вентиляционной производительности М-В. При постоянных оборотах вала М-В дополнительно возникает проблема обеспечения работы котла с максимальным числом СПП для повышения экономичности при регулировании производительности котла. Устранить эти недостатки можно путем регулирования вентиляционной производительности М-В за счет изменения оборотов приводного вала М-В, а также путем изменения температуры сушильного агента за счет дросселирования всасывающего и напорного пылепроводов. Регулирование вентиляционной производительности М-В за счет регулирования оборотов в настоящее время не применяют из-за малой глубины регулирования подачи сушильного агента, ограниченной минимально допустимой скоростью аэросмеси в пылепроводе, и ухудшения размола топлива при снижении скорости колеса М-В, а используют дросселирование потока аэросмеси. Немаловажной причиной отказа от регулирования производительности М-В путем изменения оборотов приводного вала является высокая стоимость систем регулирования скорости приводных высоковольтных электродвигателей М-В. При этом известно (Волковинский В.А., Роддатис К.Ф., Толчинский Е.Н. Системы пылеприготовления с мельницами-вентиляторами.- М.: Энергоатомиздат, 1990. — 272 с.: ил.), что наибольшей глубины регулирования СПП с М-В и наилучших технико-экономических показателей можно достичь при одновременном использовании обоих способов регулирования: вентиляционной производительности М-В за счет изменения оборотов приводного вала и температуры сушильного агента за счет дросселирования. Поэтому поиск относительно недорогих способов регулирования вентиляционной производительности М-В путем регулирования оборотов приводного вала М-В является весьма актуальным.
При выборе электропривода для мельницы-вентилятора необходимо учитывать, что системы пылеприготовления с мельницами-вентиляторами относятся к взрывоопасным установкам и на них распространяются требования «Инструкции по обеспечению взрывобезопасности топливоподач и установок для приготовления и сжигания пылевидного топлива» (СО 153-34.03.352-2003). Согласно п.п. 3.4.11 «Инструкции» для снижения времени выбега роторов М-В, характеризующихся большим моментом инерции, их электроприводы должны оснащаться устройствами электродинамического торможения, обеспечивающими быстрый останов ротора мельницы-вентилятора при возникновении опасности взрыва угольной пыли. Большие значения момента инерции М-В также существенно увеличивают время пуска М-В и приводят к необходимости обеспечения высоких значений пускового момента приводного электродвигателя. В этих условиях становится малоэффективным использование тиристорных устройств плавного пуска и электродинамического торможения высоковольтных асинхронных электродвигателей с короткозамкнутым ротором.
В данной статье рассмотрен относительно недорогой вариант регулирования вентиляционной производительности мельниц-вентиляторов производства Сызранского завода тяжелого машиностроения (ОАО «Тяжмаш») за счет изменения оборотов приводного вала с помощью частотно-регулируемого электропривода с высоковольтными асинхронными электродвигателями с фазным ротором и преобразователями частоты типа «ЭРАТОН-ФР» производства ЗАО «ЭРАСИБ».
В Таблице 1 приведены основные параметры мельниц-вентиляторов производства ОАО «Тяжмаш» (г. Сызрань), а также тип и параметры высоковольтных асинхронных электродвигателей с фазным ротором (АД ФР), которые можно использовать в качестве приводных электродвигателей М-В.
Тип и параметры мельницы-вентилятора производства ОАО «Тяжмаш» г. Сызрань
МВ 1600/ 400/ 980
МВ 2120/ 600/ 740
МВ 2700/ 650/ 590
МВ 2700/ 800/ 590
МВ 3300/ 700/ 490
МВ 3300/ 800/ 490
МВ 3400/ 900/ 490
Диаметр ротора, мм
Ширина мелющей лопатки, мм
Частота вращения ротора, об/мин
Маховый момент ротора, GD², кг·м²
Мощность электродвигателя, кВт
Тип и параметры приводных асинхронных электродвигателей с фазным ротором (АД ФР)
Параметры АД ФР
Номинальный момент, Нм
Для регулирования скорости электродвигателей с фазным ротором предлагается использовать частотно-регулируемые электроприводы на базе преобразователей частоты типа «ЭРАТОН-ФР» производства ЗАО «ЭРАСИБ», которые осуществляют частотное регулирование скорости электродвигателя по цепи ротора. Преобразователь частоты типа «ЭРАТОН-ФР» представляет собой реверсивный транзисторный инвертор напряжения с широтно-импульсной модуляцией, который устанавливается между цепью ротора и питающей сетью 0,4 кВ 50 Гц (непосредственно), или 6 кВ 50 Гц (через согласующий трансформатор). Однолинейные структурные схемы электропривода с АД ФР и преобразователем частоты «ЭРАТОН-ФР» показаны на рис. 1.
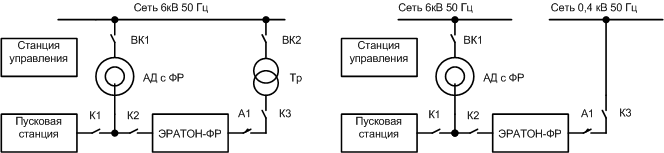
Рис. 1. Однолинейные структурные схемы электропривода с АД ФР и «ЭРАТОН-ФР»
Силовая схема преобразователя частоты «ЭРАТОН-ФР» состоит из трехфазного мостового транзисторного инвертора напряжения, через силовой фильтр или трехфазный дроссель подключенного к выводам фаз обмотки ротора (контактным кольцам) двигателя, емкостного фильтра и трехфазного транзисторного активного выпрямителя напряжения (рекуператора). Активный выпрямитель (рекуператор) через трехфазный дроссель или «синусный» LC-фильтр подключается к вторичной обмотке согласующего трансформатора. Пример силовой схемы преобразователя частоты «ЭРАТОН-ФР» для электродвигателя с напряжением ротора до 600В показан на рис. 2. Для напряжения ротора более 600В используются более сложные силовые схемы преобразователя частоты на базе Н-мостов.
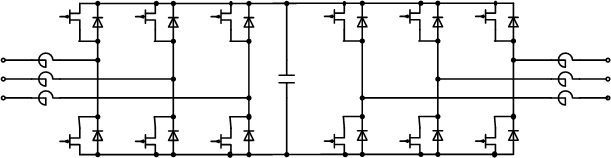
Рис. 2. Силовая схема преобразователя частоты «ЭРАТОН-ФР» для электродвигателя с напряжением ротора до 600В
Реверсивный транзисторный инвертор «ЭРАТОН-ФР» обеспечивает двухсторонний обмен энергией между цепью ротора электродвигателя и питающей сетью путем введения регулируемой ЭДС в цепь ротора. За счет регулирования величины и направления потока активной мощности в цепи ротора осуществляется регулирование величины и знака момента и скорости вала электродвигателя в широком диапазоне. Диапазон регулирования момента и скорости вала электродвигателя с инвертором «ЭРАТОН-ФР» в цепи ротора ограничен только предельно-допустимыми параметрами электродвигателя. При регулировании скорости в двигательном режиме преобразователи частоты «ЭРАТОН-ФР» обеспечивают возврат мощности скольжения из ротора асинхронного электродвигателя в питающую сеть. За счет этого из питающей сети потребляется только мощность, отдаваемая на вал электродвигателя, что обеспечивает значительную экономию электроэнергии при пуске и регулировании скорости асинхронных электродвигателей с фазным ротором по сравнению с введением сопротивления в цепь ротора.
В динамических режимах электропривод с инвертором «ЭРАТОН-ФР» может развивать высокий момент на валу электродвигателя (до 200% номинального) как в двигательном режиме, так и в режиме торможения. Большие значения момента электродвигателя позволяют осуществлять плавный пуск механизма с высоким моментом инерции за минимальное время при ограничении тока статора электродвигателя на заданном уровне (не более 200% номинального тока). При необходимости торможения механизма за минимальное время преобразователь частоты «ЭРАТОН-ФР» изменяет направление потока активной мощности в цепи ротора, что приводит к изменению знака момента электродвигателя и переводу электродвигателя в режим рекуперативного торможения с возвратом энергии вращающихся масс механизма в питающую сеть. При этом за счет создания высокого тормозного момента электродвигателем осуществляется рекуперативное торможение мельницы-вентилятора за минимальное время без дополнительных устройств электродинамического торможения.
При модернизации действующих электроприводов с электродвигателями с фазным ротором резисторно-контакторная пусковая станция может быть сохранена в качестве резервной (рис. 1). Во время работы инвертора «ЭРАТОН-ФР» пусковая станция отключается контактором. При этом пусковая станция резервируется в рабочем состоянии и может быть включена в любой момент времени для пуска и регулирования скорости электродвигателя, что повышает надежность электропривода.
Таким образом, частотно-регулируемый электропривод (ЧРЭП) с электродвигателем с фазным ротором (АД ФР) и преобразователем частоты типа «ЭРАТОН-ФР» может обеспечить плавный пуск М-В с ограничением тока электродвигателя на заданном уровне, плавное регулирование оборотов вала М-В и рекуперативное торможение с возвратом кинетической энергии вращающихся масс ротора М-В в питающую сеть с заданным тормозным моментом за минимальное время без дополнительных устройств электродинамического торможения.
Как отмечалось выше, одним из ограничений на применение регулируемого электропривода мельниц-вентиляторов является высокая стоимость пускорегулирующей аппаратуры для высоковольтных электродвигателей. С этой точки зрения частотно-регулируемый электропривод с АД ФР и преобразователем частоты «ЭРАТОН-ФР» в цепи ротора имеет существенные преимущества по сравнению с электроприводом на базе высоковольтных асинхронных электродвигателей с короткозамкнутым ротором и высоковольтным преобразователем частоты в статоре электродвигателя. Как видно из анализа параметров цепи ротора асинхронных двигателей для мельниц-вентиляторов (Таблица 1), напряжение между кольцами АД ФР не превышает 1100 В, а ток ротора не превышает 560 А. С учетом этих особенностей преобразователь частоты в цепи ротора АД ФР может быть выполнен на низковольтных транзисторах с минимальным количеством транзисторно-диодных ячеек и стоимость такого преобразователя может быть существенно ниже стоимости преобразователя частоты в цепи статора высоковольтного электродвигателя.
В Таблице 2 приведены данные о стоимости преобразователей частоты типа «ЭРАТОН-ФР» для управления высоковольтными асинхронными электродвигателями с фазным ротором, которые можно использовать в качестве приводных электродвигателей мельниц-вентиляторов производства ОАО «Тяжмаш» (Таблица 1). Цены даны без учета НДС для структурной схемы электропривода, изображенной на Рис. 1. а. В данном варианте мощность скольжения ротора АД ФР в двигательном режиме работы электропривода возвращается в высоковольтную сеть 6 кВ 50 Гц через согласующий трансформатор. Цены в Таблице 2 указаны с учетом стоимости согласующего трансформатора «сухого» типа. Электропривод с преобразователями частоты «ЭРАТОН-ФР-ХХХ-2» может обеспечить плавное регулирование скорости М-В в диапазоне 50:1 без датчика положения вала электродвигателя. В динамических режимах пуска и рекуперативного торможения электропривод с преобразователем частоты «ЭРАТОН-ФР-ХХХ-2» может обеспечить перегрузку по моменту Кпм = 1,5 относительно номинального момента электродвигателя. При этом время торможения М-В от номинальной скорости до полной остановки при возникновении взрывоопасной ситуации не будет превышать значений, указанных в Таблице 2.
Что такое маховый момент двигателя
- Home
- Media
- Gallery
- Audio
- Dua
- Khutba
- Qur’an
- Ramadhan
- Other
- Videos
- Conferences
- LUL TV Episodes
- LIVE
- LUL TV
- LUL Radio
- Social Feed
- Projects
- Taqwā & Iman
- Salaah Times
- How to Perform Salaah
- Recite the Holy Qur’an
- Ask Imam
- Donations
- Contact

Ask Imam




Способы задания момента инерции вращающихся машин, инерционные постоянные
Уравнение движения ротора синхронной машины
Уравнение движения ротора генератора
Движения ротора синхронного агрегата
ИНЕРЦИОННЫЕ ПОСТОЯННЫЕ ТУРБОАГРЕГАТОВ
ОСНОВНЫЕ ТЕХНИЧЕСКИЕ ДАННЫЕ ТУРБОГЕНЕРАТОРОВ, ПАРОГЕНЕРАТОРОВ И СИНХРОННЫХ КОМПЕНСАТОРОВ
Уравнение движения генератора
Проектирование электрических машин переменного тока — Основные параметры турбогенераторов
Форум режимщиков
Методические указания по определению устойчивости энергосистем, часть 1 (стр. 2 )
При расчете механической инерционной постоянной агрегата необходимо пользоваться общим маховым моментом, который состоит из суммы махового момента генератора (двигателя), момента турбины и момент других элементов, таких как редуктор. Для турбогенераторов момент инерции турбины примерно равен моменту инерции генератора, поэтому при расчете постоянной механической инерции агрегата, состоящего из генератора и турбины, можно значение постоянной механической инерции г.
Маховые моменты и механические постоянные инерции некоторых паровых турбин и генераторов. Частота вращения n, об/мин. Механическая постоянная инерции агрегата tJ, с. Постоянная инерции агрегата (с учетом турбины) приведена к номинальной активной мощности. Генераторы, отмеченные *, с производства сняты. Основные технические данные турбогенераторов (четырехполюсных, одновальных).
ТJ– постоянная инерции вращающихся масс турбины и генератора. Она определяется следующим образом: (). Выражение () называется уравнением электромеханических переходных процессов. Если потерями мощности в агрегате и потерями в демпферных контурах пренебречь, т.
К ротору генератора приложены моменты электромагнитных сил от статора генератора и момент от ротора турбины. Описание механической модели генераторного агрегата. В общем случае, ротор турбины может быть механически связан с ротором генератора через редуктор, или через вал. Обозначим за [math]n_rd in mathbbR_+^*[/math] передаточное отношение редуктора. Однако, во многих справочниках приведен маховый момент (в некоторой литературе, называемый, также, гравиметрический момент инерции) синхронного генератора и турбины [math]GD^2[/math]. Маховый момент [math]GD^2[/math] имеет такую же единицу измерения [math][kg cdot m^2][/math], как и момент инерции [math]J[/math].
где — маховый момент (момент вращающихся масс) агрегата, т?м2; — номинальная частота вращения ротора, об/мин; — номинальная мощность агрегата, МВ?А. В () маховый момент равен сумме маховых моментов генератора и турбины , то есть. При расчетах при базисной мощности, отличной от номинальной, постоянная инерции определяется выражением.
Маховый момент и момент инерции связаны простым соотношением: J=(GD2)/4 независимо, задан ли момент в кг или кгс. Кроме того, производитель может указать момент инерции как WR2 или WK2. Для расчета динамической устойчивости генератора также необходимо знать механические параметры турбины и редуктора. Расчет проводится аналогичным способом, но необходимо принять во внимание, что момент инерции может быть приведен для разного числа оборотов. Пример расчета постоянных инерции. Далее рассмотрим пример определения механической постоянной инерции для генератора и сравним с расчетом в ETAP.
где Мт — механический момент, развиваемый турбиной и приложенный к ротору генератора; Мэ — приложенный к ротору электромагнитный момент генератора, который по отношению к моменту турбины является тормозящим; ту — постоянная времени инерции турбоагрегата, равная сумме значений инерционных постоянных всех его вращающихся масс. Производная doa/dt представляет собой ускорение (положительное или отрицательное) вращающихся масс турбоагрегата, возникающее при любом переходном процессе из-за нарушения равенства между моментом турбины и электромагнитным (тормозящим) моментом генератора.
Маховой момент вращающихся частей турбины относительно невелик и поэтому считается, что требуемый маховой момент должен быть обеспечен ротором генератора. Если же маховой момент ротора генератора почему-либо мал, то устанавливают дополнительный маховик с соответствующим маховым моментом. Такая высокая точность объясняется небольшим весом стола, малым маховым моментом ротора электродвигателя и низкими скоростями подачи.
Это связано с тем, что в современных турбоагрегатах маховой момент турбины превосходит маховой момент генератора, при этом с ростом мощности турбины в общем случае наблюдается более быстрый рост ее махового момента. приведены соотношения между маховыми моментами и механическими постоянными времени турбин и генераторов. Коэффициент полезного действия. для турбогенераторов одной серии возрастает с ростом мощности, но при переходе к сериям турбогенераторов с более интенсивным использованием он, как правило, может несколько снижаться (рис.
— постоянной инерции агрегата (генератор + турбина)tj, с, или маховым моментом GD2, т?м2; — синхронным числом оборотов n, об/мин; — постоянной времени обмотки возбуждения при разомкнутом статоре , с. Сопротивления генераторов в абсолютных единицах по каталожным данным вычисляются по формуле. где x — в относительных единицах.
Маховой момент вращающихся частей турбины относительно невелик и поэтому считается, что требуемый маховой момент должен быть о беспечен ротором генератора. Если же маховой момент ротора генератора почему-либо мал, то устанавливают дополнительный маховик с соответствующим маховым моментом. Величина махового момента которая обеспечивается конструкцией вновь проектируемого генератора, приближенно может быть оценена по значению махового момента (00 )к, наиболее подходящего по мощности Ык и по скорости уже изготовленного генератора (см., напрнмер, табл. 34]), пользуясь при этом зави.
Турбины и генераторы используются для производства электроэнергии, но турбина преобразует доступные формы энергии во вращение, в то время как генератор преобразует вращение в электричество. В зависимости от типа энергии, которую они используют, электростанции имеют соответствующие типы турбин и используют их для производства электроэнергии. У турбин есть много других применений, кроме питания генераторов, но все генераторы производят электричество. В дополнение к различным целям и функциям турбины и генераторы строятся совершенно по-разному. Единственное, что у них общего – это то, что они оба.
Определение момента инерции и махового момента электрического привода методом свободного выбега
Новые аудиокурсы повышения квалификации для педагогов
Слушайте учебный материал в удобное для Вас время в любом месте
откроется в новом окне
Выдаем Удостоверение установленного образца:
Тема: Определение момента инерции и махового момента электрического привода методом свободного выбега
Цель работы .
Определить момент инерции и маховой момент электропривода, приобрести практические навыки в опытном определении момента инерции и махового момента электропривода; получить экспериментальное подтверждение теоретическим сведениям.
Программа работы
1. Ознакомиться с устройством лабораторной установки; записать паспортные данные электрических машин и измерительных приборов.
2. Собрать схему по рис. 26.1 и после проверки ее преподавателем выполнить опыт холостого хода.

3 . Снять данные и построить график «Кривая выбега» агрегата n = f(t).
4. Используя результаты опытов (п. 2 и 3), определить общий момент инерции и маховой момент агрегата.
5. Составить отчет и сделать заключение о проделанной работе
Подготовка к работе
1. Повторить теоретический материал: статический и динамический моменты инерции; основное уравнение движения электропривода; момент инерции и маховой момент электропривода; приведение момента инерции и махового момента электропривода к частоте вращения вала двигателя.
2. Подготовить в рабочей тетради таблицы для занесения результатов опытов и координатную сетку для построения графика.
Основные понятия и сведения из теории.
При установившемся режиме работы электропривода, т. е. при постоянной его частоте вращения, мощность, развиваемая электродвигателем, расходуется на преодоление лишь только статической нагрузки. Если же в электроприводе наступил переходный режим, и он стал работать с переменной частотой вращения, то мощность электродвигателя расходуется не только на статическую, но и динамическую нагрузки.
Статическая нагрузка обусловлена двумя факторами: моментом статического сопротивления на валу рабочего механизма и силами сопротивления в передачах, соединяющих вал электродвигателя с выходным валом рабочего механизма (рабочей машины) динамическая нагрузка электропривода определяется динамическим моментом М д обусловленным изменением скорости движения всех элементов системы электропривода.
Уравнение движения электропривода устанавливает связь между моментами, действующими на вал электродвигателя: моментом М 2 развиваемым электродвигателем на его валу, моментом стати ческой нагрузки М с , и динамическим моментом М д :
М 2 = М с ± М д
Знак плюс в этом выражении соответствует процессу ускорения (нарастанию скорости) электропривода, а знак минус замедлению (убыванию скорости). Момент статической нагрузки, соответствующий установившемуся режиму работы электропривода (не изменой частоте вращения), можно представить в виде суммы моментов — момента статического сопротивления механизма М с.м , обусловленного полезной работой механизма (например, работой по подъему груза), и момента трения М тр , вызванного силами трения в механизме:
М с = М с.м + М тр
Момент трения можно учесть введением в уравнение значений КПД рабочего механизма и КПД передаточного устройства (редуктора) η ред . В этом случае момент статического сопротивления механизма (Н·м)
М с = М с.м / η
где η = η р.м. · η ред
Динамический момент М д возникает под влиянием ускорений при изменениях скорости движения, для электропривода с вращательным движением динамический момент (Н·м)
М д = Ј·(dω/dt ),
Ј- момент инерции вращающегося тела относительно оси вращения, кг·м 2
ω- угловая скорость вращения этого тела, рад/с.
Используя выражения, получим уравнение движения электропривода:
М 2 = М с + М д = (М с.м / η) + Ј·(dω/dt)
Обычно приводной двигатель соединяется с рабочим механизмом промежуточным передаточным устройством, изменяющим на вращения и передаваемый момент. Таким устройством чаще всего является редуктор с КПД и передаточным отношением i=ω д /ω мех , угловые скорости вращения валов двигателя и рабочего механизма соответственно.
Для того, чтобы избежать трудоемкого решения нескольких уравнений движения для различных элементов электропривода с разными угловыми скоростями движения, все моменты сопротивления и моменты инерции различных элементов, образующих систему электропривода, приводят к какой-либо одной скорости движения- обычно к угловой скорости вращения вала электродвигателя. Другими словами, реальная система электропривода, элементы которой вращаются с разными угловыми скоростями, заменяется упрощенной системой, у которой вся движущаяся масса сосредоточена на одном валу в вращается с угловой скоростью. В этом случае приведенное значение статического момента сопротивления механизма имеет вид
М ‘ с.м. = М с.м. / η·i
где i=ω д /ω мех — передаточное отношение редуктора.
Общий момент инерции системы электропривода определяется суммой моментов инерции: момента инерции Ј д вращающихся частей электродвигателя и расположенных на его валу устройств (например, соединительной муфты) и момента инерции Ј ‘ приведенного к угловой скорости вала двигателя передающего устройства (редуктор) и рабочего механизма:
Ј общ = Ј д + Ј ‘
Приведенный момент инерции Ј ‘ определяется суммой приведенных значений моментов инерции всех элементов электропривода, вращающихся с угловой скоростью, отличающейся от угловой скорости вращения вала двигателя ω д ;

где i, — передаточные отношения на разных ступенях угловых скоростей вращения.
Мерой инерции вращающихся тел является также маховой момент, связанный с моментом инерции Ј зависимостью
GD 2 = 4·g·J
где G — сила тяжести вращающегося тела, Н; D- диаметр вращения, м; g=9,81 м/с — ускорение свободного падения (является коэффициентом, связывающим единицы измерения — ньютоны и килограммы: 1 кг = 9,81 Н); Ј— момент инерции, кг·м 2
В данной работе рассматривается один из методов экспериментального определения общего момента инерции и общего махового момента системы электропривода, называемый методом свободного выбега (самоторможения). Выбег — это неустановившееся движение (по инерции) подвижных частей системы электропривода после отключения двигателя за счет кинетической энергии этих частей.
Сущность метода выбега состоит в следующем. Исследуемый агрегат, включающий двигатель и механически соединенные с ним элементы, разгоняется до некоторой установившейся частоты вращения в режиме холостого хода. После этого двигатель отключают от сети, и наступает процесс самопроизвольного торможения, т. е. торможения исключительно за счет внутренних сил трения (трения в подшипниках, трения щеток о коллектор или контактные кольца двигателя, трение в других элементах электропривода). На преодоление этих сил трения затрачивается кинетическая энергия (Дж), запасенная во вращающихся частях агрегата:
А = J общ ·ω 2 д 0 /2
С другой стороны, эта энергия может быть определена как произведение мощности, затраченной на приведение во вращение системы электропривода в режиме холостого хода Р вр на время t
Приравняв, получим выражение общего момента инерции (кг·м 2 )
J общ = 2·P вр.0 ·t / ω 2 д.0
Переходя к частоте вращения двигателя в режиме холостого хода и учитывая, что ω= 0,105 n, получим
Ј общ = 182 Р вр.0 ·t / n 2 д.0
По найденному значению общего момента инерции вращающихся частей системы электропривода Ј общ , воспользовавшись, зависимостью, определяют маховый момент агрегата (н·м 2 ).
GD 2 = 4·g·J общ = 7142·P вр . ·t /n 2 д .
Значения мощности и времени, определяют экспериментально, выполнив опыт холостого хода, опыт свободного выбега и построив кривую выбега.
Порядок выполнения работы
Опыт холостого хода.
Двигатель включают в сеть при номинальном напряжении сети. Регулировочным реостатом устанавливают частоту вращения. После того как частота вращения агрегата достигнет установившегося значения, снимают показания приборов и заносят их в табл.1. Необходимые вычисления, выполняют по формулам:
мощность в цепи якоря двигателя (Вт)
Р = U·I α0 ;
электрические потери в обмотках цепи якоря двигателя (Вт)
P э.α = I 2 α0 ·∑r
Где ∑r = r α +r д.п + ….
— сумма сопротивлений обмоток в цепи якоря двигателя при температуре окружающей среды, если опыт проводился на «холодном двигателе), Ом;
электрические потери в щеточном контакте (Вт)
P э.щ. = I α0 · ∆ U щ
где ∆ U щ — падение напряжения в контакте щеток (принимают = 2В)
Все полученные значения величин заносят в табл. 26.1 и определяют мощность, затраченную на вращение агрегата в режиме холостого хода (Вт)
График кривая выбега.
После снятия показаний приборов при опыте холостого хода отключают двигатель от сети и одновременно включают секундомер. В процессе выбега агрегата, т. е. его вращения по инерции, необходимо 6— 8 раз измерить частоту вращения с одновременным фиксированием времени каждого замера по секундомеру. Первый замер частоты вращения делают в момент отключения двигателя, т. е. в момент времени О, а последний в момент полной остановки агрегата, т. е. при n = О. Особенно внимательно следует отнестись к измерениям при первых трех замерах, следующих непосредственно за отключением двигателя, так как

эти замеры в значительной степени влияют на точность результата эксперимента. Показания приборов заносят в табл. 2. затем строят график « кривая выбега» (рис. 26.2).
Чтобы воспользоваться выражением для определения общего момента инерции агрегата, необходимо определить постоянную времени выбега. С этой целью на графике «кривая выбега» проводят касательную к начальной части кривой в точке А (см. рис. 26.2) сечения с осью абсцисс в точке В. Полученный таким отрезок ОВ на оси абсцисс и определит время, которое заносят в табл. 3. В эту же таблицу записывают значения и P вр.0 и n д.0 из табл. 1, а затем определяют общий момент инерции агрегата и маховой момент.
Анализ результатов лабораторной работы
Анализируя результаты лабораторной работы, необходимо иметь в виду следующее. При расчете момента инерции в выражении предусмотрена подстановка значения мощности, затраченной исключительно на приведение во вращение агрегата с частотой вращения n д.0 , т. е. мощности механических потерь Р мех . Что же касается значения мощности Р вр.0 , определяемой по формуле, то она помимо мощности механических потерь включает в себя и мощность Р м , т.е.
Р вр.0 =Р м + Р мех
Следует заметить, что исследованию подвергается агрегат, состоящий из двух электрических машин, поэтому магнитные потери происходят лишь в одной из них (двигателе), а механические потери одновременно в двух машинах. По этой причине доля магнитных потерь в общей сумме потерь
Р вр.0 =Р м + Р мех.д + Р мех.г
становится малозначительной. Если же учесть, что в реальных условиях система электропривода содержит помимо рабочей машины еще и передаточное устройство (редуктор), в котором также имеют место механические потери, то ошибка метода свободного выбега становится практически незаметной.
Контрольные вопросы
1. На какие свойства электропривода влияет величина момента инерции и махового момента?
2. Что такое маховой момент и какова его зависимость от момента инерции системы электропривода?
3. На чем основан метод свободного выбега для определения момента инерции системы электропривода?
4. Как изменится время выбега агрегата, если на валу двигателя установить маховик?
5. Что представляет собой кривая выбега, и каков порядок снятия данных для ее построения?
6. Что называется электроприводом?
7. Схема структуры электропривода?
8. Статический и динамический моменты?
9. Основные режимы работы электродвигателя?
Приведение маховых масс к одной оси

Иногда возникает необходимость приведения маховых масс электропривода к одной оси. Это приводит к удобству расчета системы электропривода, так как все моменты инерции системы приводятся как правило к валу машины.
Для начала разберемся что такое момент инерции относительно оси – это сумма произведений масс отдельных частей тела, умноженного на квадрат расстояния этой же части тела до оси вращения, которая берется для всего тела:

На практике, как правило, момент инерции довольно часто выражают как произведение квадрата радиуса инерции на массу тела:

m – общая масса всего тела, выраженная в кГсек 2 /м;
p – радиус инерции тела, выражен он в м;
Радиус инерции – расстояние от оси вращения, которая проходит через центр тяжести объекта, на котором нужно поместить массу объекта, которая будет сосредоточена в одной точке, чтоб она удовлетворяла равенству:

Значения радиусов инерции простейших геометрических тел приведены ниже. Используя формулы приведенные ниже и при условии известности массы тела, можно вычислить момент инерции тела по формулам, приведенным выше:


Если геометрические тела не сложные, то момент инерции можно приблизительно определить как сумму таких моментов отдельных тел , взятых относительно оси вращения. Как пример – момент инерции (далее J) маховика будет равен сумме J спиц, обода и втулки. В случаях, когда точное вычисление J представляется затруднительным, могут оперировать приближенными величинами. Иногда для маховика определяют J обода и прибавляют от 8% до 15% для учета маховых масс спиц. В случае червяка J ротора зубцов принимается 40% J пологого цилиндра соответствующих размеров. Червячное или зубчатое колесо учитывается как полый цилиндр. К полученной величине добавляют 25% для спиц и втулки. Если для зубчатого колеса известны только вес и шаг зацепления, то J могут определять как произведение 60% всего веса на квадрат радиуса длительной окружности.
Приведенный момент инерции (Jпр) входит в уравнение движения электропривода. Jпр – это J простейшей системы, которая состоит из элементов, которые вращаются со скоростью вала или оси, к которой производят приведение, и при этом запас кинетической энергии приведенной системы равен запасу кинетической энергии реальной системы.
Ниже показана реальная система и приведенная


В таком случае выполнится равенство:

Где: Jпр – приведенный момент инерции в валу электромашины;
J1, J2… Jn, ω1, ω2, ωn – моменты инерции и угловые скорости вращения механизмов или передач машины в соответствующих осях;
Jд, ωд – угловая скорость и момент инерции электродвигателя.
Отсюда очевидно, что:

Где: j1, j2, …, jn – передаточные числа между осями вращающихся звеньев и осью электромашины.
Отсюда следует, что Jпр вращающихся частей равен сумме J каждого отдельного элемента системы относительно своего вала, деленного на квадрат передаточного числа (j), между валом конкретного элемента и валом, к котором приводится момент инерции. Часто при определении Jпр системы его считают равным сумме моментов инерций ротора или якоря электрической машины и Jпр рабочего органа, а также J отдельных звеньев системы передаточного механизма учитывают с помощью увеличения J в δ раз, то есть:

Значение δ обычно лежит в пределах 1,1 ÷ 1,3.
В теории электропривода довольно часто встречается понятия махового момента – GD 2 , вместо моментов инерций. Если заменить в формуле приведенной выше массу m на вес G и ускорение свободного падения g, а радиус величины инерции p через ее диаметр D, получим следующее выражение:

GD 2 выражается в кГм 2 . Очевидно, что для GD 2 также существует соотношение, аналогичное выражению для J:

При введении вместо J в уравнение движение электропривода GD 2 получим следующее выражение:
- При постоянном GD 2 :

- При переменном GD 2 :

Уравнения движения с использованием GD 2 и числа оборотов в минуту могут казаться более удобными для применения на практике, так как скорость вращения вала машины обычно измеряют в оборотах в минуту — об/мин, GD 2 – довольно часто публикуют в каталогах. Однако при использовании их следует помнить, что коэффициенты 375 и 7200 – числа, имеющие размерность ускорения. Без учета этих обстоятельств правые части этих выражений не будут иметь размерность момента. Поэтому при сложных расчетах рекомендуется использовать уравнение движения в форме  или
или  .
.