
Контроллеры шаговых двигателей
Контроллеры шаговых двигателей
Предлагаем контроллеры шаговых двигателей ведущих мировых производителей! В наличии на складе готовые решения для создания станка с ЧПУ на четыре оси!
Специалисты нашей компании всегда готовы оказать вам качественную техническую поддержку, проконсультировать вас при выборе контроллера шагового двигателя.
НПО «АТОМ» разрабатывает и производит контроллеры движения шаговых двигателей по техническому заданию заказчика. Также серийно выпускаем платы коммутации для подключения драйверов ШД к персональному компьютеру при построении станков с ЧПУ.

Контроллер шаговых двигателей для 4-х осевого станка с ЧПУ Geckodrive G540
Максимальный ток обмотки ШД — 3.5 А
Напряжение питания — 18 .. 50 В
Режим работы — микрошаг (1/10 шага)
Совместим с Mach3, TurboCNC, LinuxCNC

Плата коммутации драйверов шаговых двигателей для станка с ЧПУ GB4
Подключение до 4-х драйверов ШД через LPT
Изолированные входы / Релейные выходы
E-STOP / ChargePump / Конвертер ШИМ-10В
Совместима с Mach3, LinuxCNC, TurboCNC
Встроенный изолированный источник питания

Контроллер шаговых двигателей для 3-х осевого станка с ЧПУ MX3660
Максимальный ток обмотки ШД — 6 А
Напряжение питания — 24 .. 54 В
Режим работы — микрошаг до 1/64
Совместим с Mach3, TurboCNC, LinuxCNC
Большую часть наших разработок контроллеров движения шаговых двигателей составляют устройства, проектируемые и изготавливаемые в соответствии с техническими заданиями наших заказчиков. Если у вас есть актуальные задачи автоматизации, мы будем рады помочь вам найти техническое решение ваших проблем! Описания-примеры контроллеров шаговых двигателей, разработанных и изготовленных нашей компанией, мы с удовольствием отправим вам по вашему запросу.
Контроллер Geckodrive G540 давно зарекомендовал себя на рынке как надежное качественное изделие.Это полностью законченное решение для построения четырехосевой ЧПУ системы на основе компьютера с заранее установленным CNC программным обеспечением. Контроллер подходит для управления шаговыми двигателями с током обмотки до 3.5 Ампер (типоразмеры NEMA 17, NEMA 23, некоторые модели типоразмера NEMA 34). Рабочее напряжение двигателей — от 18 до 50 Вольт.
Контроллер управляет шаговыми двигателями в режиме микрошага (1/10), что обеспечивает отличную плавность движения. Контроллер G540 совместим с любым стандартным программным обеспечением для численного программного управления станками — Mach3, LinuxCNC, TurboCNC и другими программными комплексами.
Отличительной особенностью контроллера, как и всей линейки Geckodrive, является функция «морфинга», то есть плавного изменения формы тока при увеличении/уменьшении частоты вращения. В конечном счете, «морфинг» нацелен на увеличение крутящего момента двигателя в среднескоростном диапазоне. Для некоторых моделей двигателей увеличение момента использование «морфинга» в рабочем диапазоне от 300 до 1500 оборотов в минуту приводит к увеличению крутящего момента до 30%.
Контролер включает в себя четыре канала управления шаговым двигателем на базе драйвера Geckodrive G250X и блок управления рабочим инструментом. Для подключения контроллера к ПК необходим LPT порт. В комплекте с G540 поставляется LPT кабель длиной 1.8 м.
Типичным применением шаговых двигателей и контролеров для них является этикеровочное оборудование. При использовании шагового привода в аппликаторах возможно очень точное позиционирование этикеток на тару с продукцией — при высокой производительности. Следет подчеркнуть, что применение систем автоматизации при маркировке и упаковке готовой продукции является одним из самых экономически эффективных способов. На серийных производствах уже давно не используется ручной труд для этих операций. Этикеровочная машина обеспечиват лучшую точность, повторяемость операции, исключается человеческий фактор. Даже при относительно небольшой производительности 5000 этикеток за смену (8 часов), автоматический аппликатор уже способен заменить двух-трех рабочих. При этом оборудование легче переносит перемены в форме, размерах тары, увеличении интенсивности производительности.
Наша компания предлагает разработку и производство контроллеров движения шаговых двигателей для систем фасовки, упаковки и маркировки продукции (термомаркировка при помощи принтера, нанесение этикеток на тару и т.д. — вплоть до полной автоматизации производственной линии). Опыт наших специалистов в проектировании аппликаторной техники позволяет нам компетентно и внимательно подходить к решению технологических задач наших заказчиков.
Почти все решения по этикеровке имеют в своей основе шаговый привод, идеально подходящий для систем, где нужна работа по точному позиционированию механизмов с частыми пусками и остановами, при относительно небольших рабочих скоростях. Сервопривод здесь использовать нерационально, так как сервоприводы как правило рассчитаны на большие номинальные скорости и проигрывают шаговым двигателям по стоимости. Позиционирование шаговых двигателей в автоматическом аппликаторе осуществляется при помощи датчиков и контроллера движения.
Номенклатура и возможности датчиков, которые используются в этикеровщиках, постоянно расширяются, это позволяет работать с самой разнообразной по форме, материалу и цвету тарой. Благодаря современным техническим достижениям аппликаторы работают со скоростью до 50 метров в минуту, при этом этикетируется до 35 тысяч единиц готовой продукции (для сравнительно небольших этикеток).
Купить контроллер шагового двигателя для применения в пищевой и химической отрасли вы можете в нашей компании, связавшись с нами по телефонам или электронной почте. Мы гарантируем долговременную бесперебойную работу поставляемого нами оборудования в области маркировки, упаковки и этикеровки продукции, в нашей компании всегда легко доступна техническая поддержка. Контроллеры для построения многоосевых станков с ЧПУ у нас всегда в наличии на складе; контроллеры в соответствии с техническим заданием заказчика мы спроектируем, изготовим и поставим в разумные для вашего производства сроки!
Подключение и настройка драйвера шагового двигателя
- Авторизуйтесь для ответа в теме
#1 OFFLINE torvn77


- Пол: Мужчина
- Из:Санкт-Петербурга
Определение и изменение значения микрошага на который настроен драйвер.
Определние на какой микрошаг настроен драйвер шагового мотора для чайников.
Откройте блок блок управления и найдите место,
где в нём установлены коробочки примерно такого вида: 
Число коробочек и число осей станка должно совпадать.
если есть поворотная ось,то для неё как может быть отдельная коробочка,как и нет.
В этом случае вам при продаже станка должны были сказать,
что поворотная ось подключается вместо одной из линейных осей.
Также на станках улучшенной конструкции на некоторые оси может быть установлен не один мотор,
а два в крайнем положении оси каждый.
Такая конструкция делается для того,чтобы более точно позиционировать инструмент по краям рабочего поля.
При правильном подключении такие моторы подключаются к ЧПУ не зависимо друг от друга и то,
что они управляют одной осью задаётся соответсвующими настройками внутри ЧПУ собственно.
На одной из коробочек найдите таблицу соответствия числа шагов и положения переключателей для настройки микрошага.
Выглядит обычно эта таблица так: 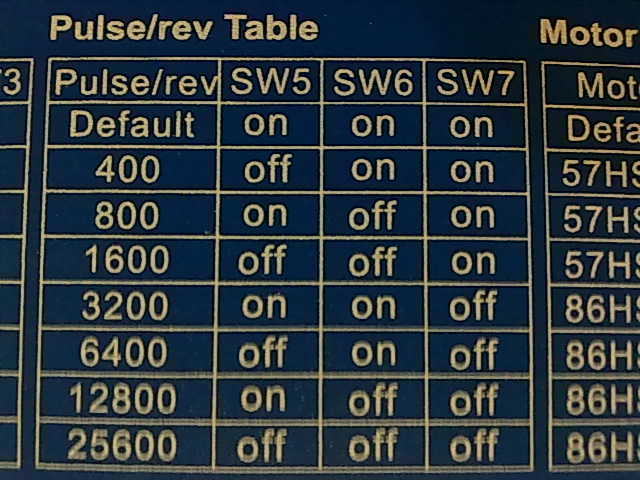
Первый столбец этой таблицы назван Pulse/Rev,то есть число шагов на один оборот двигателя.
Вообще говоря,хотя угол,на который поворачивается двигатель при одном полном шаге и стандартен,
но в стандарте есть и другие значения угла поворота двигателя при полном шаге.
Например LeadShine производит двухфазные двигатели с углами поворота в 0,9 и 1,8 градуса.
Соответственно на один оборот будет приходиться в первом случае 360/0,9=400 шагов.
Во втором случае только 200.
Но тем не менее в таблице указан не микрошаг,а число шагов на оборот для конкретного двигателя.
Чтобы получить от туда микрошаг разделим число шагов на оборот в каждой строке на число
шагов двигателя для которого сделана таблица.
Для какого двигателя делалась таблица на каробке драйвера не объясняется,поэтому будем его угадывать.
Наиболее распространённый вариант двигателя имеет 200 шагов на оборот.
Делим на него числа из таблицы и получаем последовательность
200:200=2^0=1 (Целый,не дроблёный шаг,в таблице вместо 200 стоит слово default )
400:200=2^1=2
800:200=2^2=4
1600:200=2^3=8
3200:200=2^4=16
6400:200=2^5=32
12800:200=2^6=64
25600:200=2^7=128
Отношения совпадают со степенями двойки,так что похоже,что предположение о том,
что таблица составлена для двигателя с 200 шагами на оборот правильное.
То что указано справа и есть микрошаг — отношение числа микрошагов к одному полному шагу двигателя.
Чтобы определить на какой микрошаг настроен драйвер,посмотрим на названия других столбцов таблицы.
Они называются SW5,SW6 и SW7.
Так обычно называют всякие переключатели и выключатели.
Теперь поищем их,обычно они находятся на верху между двумя группами клем,
но могут быть выведены и в другом месте.
Осматриваем драйвер и находим вот это: 
Переключатель справа круговой,а значит принимать сразу значения из всех трех столбцов не может.
А вот слева есть набор из 8 тумблеров и так как никаких других переключателей у драивера нет,
предпологаем.чтоименно их и имеют ввиду в этой таблице и смотрим на положение 5,6 и 7 тумблера соответственно.
Видим что все они в верхнем положении,но что это значит,ON или OFF?
Слева внизу на тумблере есть надпись ON и указывающая на него стрелка.
Значит положение переключателя внизу означает что он включен (ON).
А все три переключателя в верхнем положении,значит они в состоянии OFF.
Ищем соответствующею строку в таблице и видим,что ей соответствует микрошаг 128.
При таком микрошаге драйвер может работать не стабильно,поэтому уменьшим его 8.
Смотрим в таблице положение выключателей для такого микрошага и видим,
что для перенастройки драйвера на него надо переключатели SW5,SW6 надо оставить в положении OFF,
а переклячатель SW7 опустить в низ в состояние ON.
Выключам станок,коли он у вас был включен и переключаем тумблеры.
Готово,теперь у нас микрошаг 8 и теперь остаётся только соответственно перенастроить ЧПУ,
а то будет изменение маштаба в 128:8 раз.
- Наверх
#2 OFFLINE 2ar

- Пол: Мужчина
- Город: Новосибирск
- Интересы: Сервисное обслуживания станков
- Из:Новосибирск
Число коробочек и число осей станка должно совпадать.
если есть поворотная ось,то для неё как может быть отдельная коробочка,как и нет.
Драйверы для шаговых двигателей
Драйверы для шаговых двигателей — электронный блок, бюджетной серии, управления шаговых двигателей с фланцем. Все управляющие входы драйвера оптоизолированы, имеет встроенную защиту от перегрева, пониженного напряжения и токовой перегрузки. Драйверы для шаговых двигателей оптимально подходит для управления биполярными и униполярными шаговыми двигателями. Срок поставки по России в течение пяти рабочих дней.
Драйвер DM542

Тип двигателя : 2х-фазный ШД
Рабочий ток : 1,0-4,2 А
Напряжение питания : 20-50 В
Частота сигнала : до 200 кГц
Микрошаг : до 1/256
Защиты : от КЗ, от перегрева
Цена 2 900 рублей.
Драйвер DM542-05 Leadshine

Тип двигателя : 2х-фазный ШД
Рабочий ток : 1,0-4,2 А
Напряжение питания : 20-50 В
Частота сигнала : до 200 кГц
Микрошаг : до 1/256
Защиты : от КЗ, от перегрева
Цена 3 300 рублей.
Драйвер DM860H

Тип двигателя : 2х-фазный ШД
Рабочий ток : 2,0-7,2 А
Напряжение питания : 24-110 (
Частота сигнала : 200 кГц
Микрошаг : до 1/512
Защиты : от КЗ, от перегрева
Цена 4 300 рублей.
Драйвер HB860H для ШД с энкодером

Тип двигателя : 2х-фазный ШД
Рабочий ток : 6 А
Напряжение питания : 30-100 В (
Частота сигнала : 200 кГц
Цена 5 800 рублей.
Драйвер HBS57 для ШД с энкодером

Тип двигателя : 2х-фазный ШД
Рабочий ток : 8.0(Peak) А
Напряжение питания : 20-50 В
Частота сигнала : 200 кГц
Цена 4 800 рублей.
Драйвер HBS86H для ШД с энкодером

Тип двигателя : 2х-фазный ШД
Рабочий ток : 8.2(Peak) А
Напряжение питания : 24-100 В (
Частота сигнала : 200 кГц
Цена 5 800 рублей.
Драйвер MA860

Тип двигателя : 2х-фазный ШД
Рабочий ток : 2,0-7,2 А
Напряжение питания : 24-80 В
Частота сигнала : до 200 кГц
Микрошаг : до 1/512
Защиты : от КЗ, от перегрева
Цена 4 000 рублей.
Драйвер ТВ6600

Тип двигателя : 2х-фазный ШД
Рабочий ток : 0,5-4 А
Напряжение питания : 12-40 В
Частота сигнала : до 200 кГц
Микрошаг : до 1/32
Цена 1 800 рублей.

- Множество подарков

Мы стараемся облегчить работу на станке с самых первых минут….

- Как правильно выбрать станок
Прежде всего нужно определится с размерами рабочей зоны. Можно взять…
Станок 1200*600*150 3кВт.(по камню) 274000р
Драйвер шагового мотора на A4988 8-35В 1А








Плата создана на базе микросхемы A4988 компании Allegro — драйвера биполярного шагового двигателя. Особенностями A4988 являются регулируемый ток, защита от перегрузки и перегрева, драйвер также имеет пять вариантов микрошага (вплоть до 1/16-шага). Он работает от напряжения 8 — 35 В и может обеспечить ток до 1 А на фазу без радиатора и дополнительного охлаждения (дополнительное охлаждение необходимо при подаче тока в 2 A на каждую обмотку).
Описание
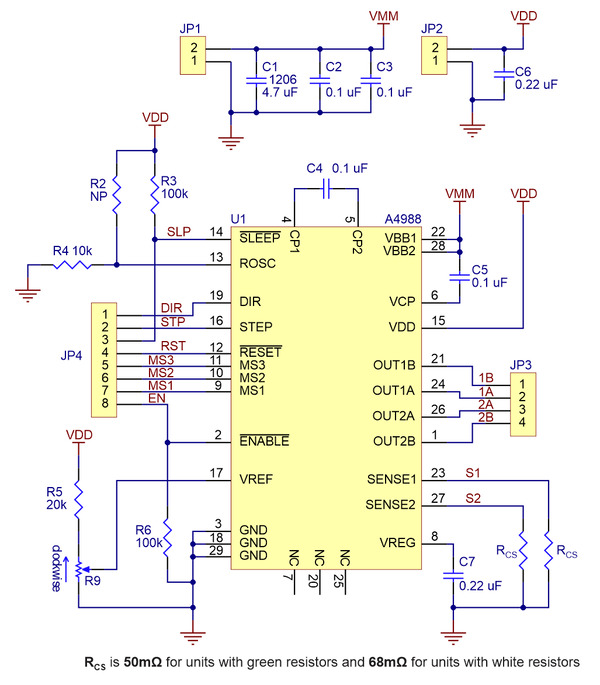
Драйвер создан на базе микросхемы управления шаговым двигателем компании Allegro A4988, изготовленной по ДМОП-технологии с регулятором и защитой по току, поэтому мы настоятельно рекомендуем, перед использованием этого продукта, ознакомиться со спецификацией A4988 (1MB pdf). Этот драйвер позволит управлять биполярным шаговым двигателем с выходным током до 2 А на обмотку (для получения дополнительной информации смотрите раздел о рассеивании мощности). Ниже приведены ключевые особенности драйвера:
- Простой интерфейс управления шагом и направлением вращения электродвигателя
- Пять различных разрешений перемещения: полный шаг, 1/2-шага, 1/4-шага, 1/8-шага, 1/16-шага
- Регулируемый контроль тока с помощью потенциометра, позволит установить максимальный выходной ток. Это даст вам возможность использовать напряжение выше допустимого диапазона для достижения более высокой угловой скорости шага двигателя
- Интеллектуальное управление автоматически выбирает режим регулировки затухания тока (медленный и быстрый режимы)
- Защитное отключение при перегреве и перегрузке по току, а также блокировка питания при пониженном напряжении
- Защита от короткого замыкания на землю, защита от замыкания в нагрузке
Этот продукт поставляется со всеми компонентами поверхностного монтажа, включая микросхему драйвера A4988, установленных как показано на изображении.
Некоторыми однополярными шаговыми двигателями (например, с шестью или восемью выводами) можно управлять с помощью этого драйвера как биполярными. Для получения дополнительной информации. Драйвер нельзя использовать для управления униполярными двигателями с пятью выводами.
Использование
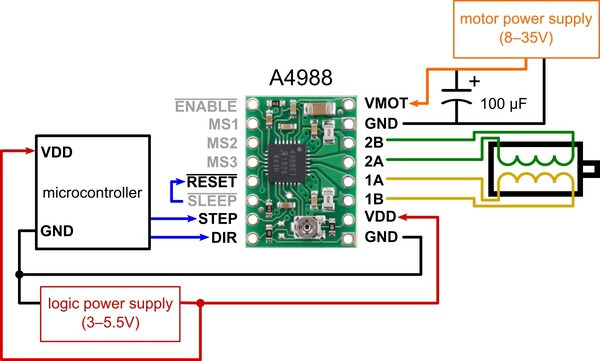
Для работы с драйвером необходимо питание логического уровня (3 — 5,5 В), подаваемое на выводы VDD и GND, а также питание двигателя (8 — 35 В) на выводы VMOT и GND. Чтобы обеспечить необходимый потребляемый ток (при пиковых до 4 А), необходимо поставить конденсаторы для гальванической развязки как можно ближе к плате.
| Внимание: В плате используются керамические конденсаторы с низким эквивалентным последовательным сопротивлением, что делает её уязвимой для индуктивно-ёмкостных скачков напряжения, особенно если питающие провода длиннее нескольких сантиметров. В некоторых случаях, даже при напряжении питания двигателя всего в 12 В, эти скачки могут превысить максимально допустимое значение (35 В для A4988) и повредить плату. Одним из способов защиты платы от подобных скачков является установка большого (не меньше 47 мкФ) электролитического конденсатора между выводом питания (VMOT) и землёй близко к плате. |
Подключение двигателя
При правильном подключении, через A4988 можно управлять четырёх-, шести- и восьми- проводными шаговыми двигателями.
| Внимание: Соединение или разъединение шагового двигателя при включённом драйвере может привести к поломке двигателя. |
Размер шага (и микрошага)
У шаговых двигателей обычно установлена конкретная величина (например 1,8° или 200 шагов на оборот), при которой достигается полный оборот в 360°. Микрошаговый драйвер, такой как A4988 позволяет увеличить разрешение за счёт возможности управления промежуточными шагами. Это достигается путём возбуждения обмоток средней величины тока. Например, управление мотором в режиме четверти шага даст двигателю с величиной 200-шагов-за-оборот уже 800 микрошагов при использовании разных уровней тока.
Разрешение (размер шага) задаётся комбинациями переключателей на входах (MS1, MS2, и MS3). С их помощью можно выбрать пять различных шагов, в соответствии с таблицей ниже. На входы MS1 и MS3 переключателя установлены 100 кОм подтягивающие на землю резисторы, а на MS2 — 50 кОм, и если оставить их не подключёнными, двигатель будет работать в полношаговом режиме. Для правильной работы в режиме микрошага необходим слабый ток (см. ниже), который обеспечивается ограничителями по току. В противном случае, промежуточные уровни будут некорректно восприниматься, и двигатель будет пропускать микрошаги.
| MS1 | MS2 | MS3 | Разрешение микрошага |
|---|---|---|---|
| Низкий | Низкий | Низкий | Полный шаг |
| Высокий | Низкий | Низкий | 1/2 шага |
| Низкий | Высокий | Низкий | 1/4 шага |
| Высокий | Высокий | Низкий | 1/8 шага |
| Высокий | Высокий | Высокий | 1/16 шага |
Входы управления
Каждый импульс на входе STEP соответствует одному микрошагу двигателя, направление вращения которого зависит от сигнала на выводе DIRECTION. Обратите внимание, что выводы STEP и DIRECTION не подтянуты к какому-либо конкретному внутреннему напряжению, поэтому вы не должны оставлять эти выводы плавающими при создании приложений. Если вы просто хотите вращать двигатель в одном направлении, вы можете соединить DIRECTION непосредственно с VCC или GND. Чип имеет три различных входа для управления состоянием питания: RESET, SLEEP и ENABLE. Дополнительные сведения об этих состояниях см. в техническом описании. Обратите внимание, что вывод RESET плавает; если вы его не используете, вы можете подключить его к соседнему контакту SLEEP на печатной плате, чтобы подать на него высокий уровень и включить плату.
Ограничение тока
Для достижения высокой скорости шага, питания двигателя, как правило, гораздо выше, чем это было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный ток 1 А с 5 Ом; сопротивлением обмотки, отсюда максимально допустимое питание двигателя равно 5 В. Использование же такого двигателя с питанием 12 В позволит повысить скорость шага. Однако чтобы предотвратить повреждение двигателя, необходимо ограничить ток до уровня ниже 1 А.
A4988 поддерживает активное ограничение тока, которое можно установить подстроечным потенциометром на плате. Один из способов установить предельный ток — подключить драйвер в полношаговый режим и измерять ток, протекающий через одну обмотку двигателя без синхронизации по входу STEP. Измеренный ток будет равен 0,7 части предельного тока (так как обе обмотки всегда ограничиваются примерно на 70% от текущей настройки предельного тока в полношаговом режиме). Учтите, что при изменении логического напряжения Vdd, на другое значение, изменит предельный ток, поскольку напряжение на выводе Vref является функцией Vdd.
Рекомендации по рассеиванию мощности
Максимально допустимый ток подаваемый на обмотку, у микросхемы A4988 равен 2 A. Фактический ток, который можно подать на плату, зависит от качества охлаждения микросхемы. Плата разработана с учётом отвода тепла от микросхемы, но при токе выше 1 A на обмотку необходим теплоотвод или другое дополнительное охлаждение.
| Эта плата может нагреться так, что можно получить ожог, задолго до того как перегреется сама микросхема. Будьте осторожны при обращении с платой и со всеми подключёнными к ней устройствами. |
Обратите внимание, что ток, измеренный на источнике питания, как правило, не соответствует величине тока на обмотке. Так как напряжение, подаваемое на драйвер, может быть значительно выше напряжения на обмотке, то, соответственно, измеряемый ток на источнике питания может быть немного ниже, чем ток на обмотке (драйвер и обмотка в основном работают в качестве переключаемого источника с пошаговым понижением питания). Кроме того, если напряжение питания намного выше необходимого двигателю уровня для достижения требуемого тока, то скважность будет очень низкой, что также приводит к существенным различиям между средним и RMS током (среднеквадратичное значение переменного тока).
Данный перевод является собственностью интернет-магазина Robototehnika.ru
Файлы для скачивания:
Спецификация Allegro A4988 (1MB pdf)
Техническое описание микросхемы Allegro A4988 — драйвер шагового мотора.
Рекомендуемые ссылки:
Модуль KiCad драйвера шагового мотора на A4988
Самодельный модуль для использования драйвера шагового мотора A4988 в KiCad. Джаред Харви, октябрь 2011 года.
Библиотека Arduino для драйверов шагового мотора на A4988, DRV8825, DRV8834
Эта библиотека Arduino, написанная участником форума laurb9, позволяет пользователям управлять шаговым мотором драйверами на A4988, DRV8825, DRV8834. Библиотека имеет функции которые позволяют пользователям установить частоту вращения, изменения режима микрошаг и указать сколько шагов отсчитать или указать
Характеристики
| Артикул | 05030401 |
- С товаром покупают (3)
Методы борьбы с резонансом в шаговом двигателе
Каждый шаговый двигатель имеет точку резонанса, и иногда вибрация двигателя может повлиять на производительность двигателя и срок службы двигателя. Важно знать возможные решения для устранения вибрации двигателя и явлений, её вызывающих.
Шаговые двигатели имеют дискретные положения, в которые может перемещаться ротор. Из-за инерции ротора, когда шаговый двигатель делает шаг, он слегка отклоняется от своей цели и колеблется, прежде чем достигнет целевой точки. Когда двигатель движется непрерывно, колебания ротора будут происходить с определенной частотой. Как только частота совпадет с собственной частотой двигателя, колебания станут резонансными и вызовут шум. Когда резонанс перекрывает магнитное поле между статором и ротором, двигатель, скорее всего, потеряет синхронизацию. Резонансная частота двигателя может быть моделирована следующим уравнением:

Где K — жесткость крутящего момента, а J — инерция. Регулируя этот параметр, мы можем уменьшить вибрацию двигателя. Ниже приводится краткое описание методов снижения вибрации и того, как они снижают резонанс.
Существует множество способов избежать резонанса: просто изменить скорость работы или применить микрошаг. Следующий список представляет собой обзор различных способов уменьшения резонанса.
Параметры работы шагового двигателя:
- Используйте другую скорость работы
- Используйте микрошаг
- Изменение тока (в сторону уменьшения)
- Применить механический демпфер
- Изменить инерцию нагрузки (например: применить планетарный редуктор)
Физические параметры шагового двигателя:
- Изменение индуктивности двигателя
- Изменение инерции ротора
- Изменение воздушного зазора двигателя
- R-обмотка, Т-соединение
Более подробные объяснения каждого метода можно найти далее:
Электрические Настройки:
1. Избегайте коммутации на резонансных частотах
Резонанс обычно возникает при определенной скорости работы двигателя. Когда скорость работы будет соответствовать резонансной скорости, возникнет вибрация, в результате чего будет снижена производительность двигателя. Самым простым способом избежать резонанса может быть простое изменение скорости работы, чтобы двигатель не достиг своей резонансной точки. Также, выбирайте шаговые двигатели хорошего качества, резонансная частота может возникнуть даже в некачественных подшипниках ротора.
2. Микрошаг уменьшает колебания
Катушки в шаговом двигателе в режиме полного шага запитываются поочередно, поэтому ротор двигателя будет иметь тенденцию отклоняться от своего положения из-за резкого прыжка магнитного потока на соседнюю пару катушек. Микрошаг может более плавно перемещать поток между катушками статора за счет уменьшения энергии возбуждения катушек и постепенной передаче потока с одной пары на вторую. Это приводит к уменьшению вибрации и шума, а резонанс будет устранен.
3. Уменьшение тока для уменьшения «жесткости» крутящего момента (dt/dθ)
Двигатель будет выдавать меньший крутящий момент при меньшем входном токе. В результате для перемещения ротора будет производится (драйвером) меньше энергии (т. е. меньше отношение dt/dθ, жесткость крутящего момента). Многие низкоскоростные приложения будут работать более плавно.
Но уменьшение тока приведет к уменьшению магнитного потока и выходного крутящего момента. Поэтому данный метод применим при использовании привода с хорошим запасом по моменту.
4. Настройка параметров затухания тока драйвера
Часто быстрое затухание тока уменьшает вибрацию и резонансы. Когда драйвер переключает направление тока, ток будет затухать переходным образом, а остаточный ток будет мешать току, установленному в другом направлении. Медленное затухание тока вызовет большую пульсацию крутящего момента, следовательно, возникнет больше вибрации.
Быстрое затухание тока может устранить помехи между двумя сигналами тока, посылаемыми водителем двигателя, и уменьшить вибрацию во время работы двигателя.

Рисунок 1. Текущий сигнал от драйвера двигателя
5. Увеличение индуктивности приведет к смещению гармоник вниз по частоте
Когда двигатель работает, резонанс будет индуцировать переменный ток в обмотке двигателя, и переменный ток будет мешать постоянному току, проходящему через обмотку. За счет увеличения индуктивности обмотка двигателя сможет противодействовать резонансу или снизить частоту резонанса.
6. Реализация R-обмотки с включенными двумя фазами

Рисунок 2: диаграмма R-обмотки
Для гибридных шаговых двигателей статор имеет две фазы. И катушки намотки расположены на расстоянии 90 ° друг от друга. Для традиционной обмотки шагового двигателя фазовые углы для каждого шага увеличиваются на 45°: 0°, 45° 90°, 135°, 180°, 225°, 270°, 315°. Когда две фазы находятся на расстоянии 45° друг от друга, фазы A и B включены. Когда две фазы находятся на расстоянии 90° друг от друга, включается только одна фаза. Поскольку распределение тока в режиме включения одной фазы и в режиме включения двух фаз различно, время установления этих двух режимов различно. Резонанс, скорее всего, возникнет из-за неравномерного времени включения обмоток на каждом шаге.
R-обмотки могут устранить положение включения 1 фазы, установив новый фазовый угол на: 22.5°, 67.5°, 112.5°, 157.5°, 202.5°, 247.5°, 292.5°, 337.5°. При постоянном включении двух фаз драйвер не будет подавать 100% ток только в одну фазу. Включение обеих фаз может сделать время установления для каждого шага одинаковым, в результате чего уменьшается резонанс.
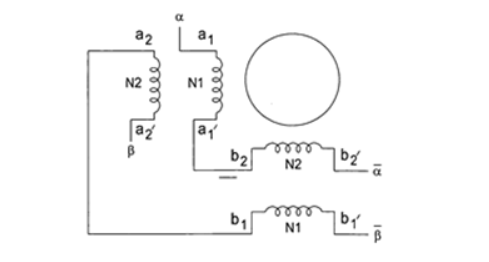
Рисунок 3.Схема намотки R-образной обмотки
R-обмотка была изобретена Тедом Лином. Двигатель с R-обмоткой имеет две катушки на полюс, и каждая катушка имеет разные витки. Эти два набора проводов намотаны последовательно друг с другом, но конец первой катушки соединен с концом второй катушки. Такая конструкция позволяет сдвигать фазу двигателя на 22,5 градуса, что приводит к снижению шума и вибрации двигателя.
7. Реализация T-соединения
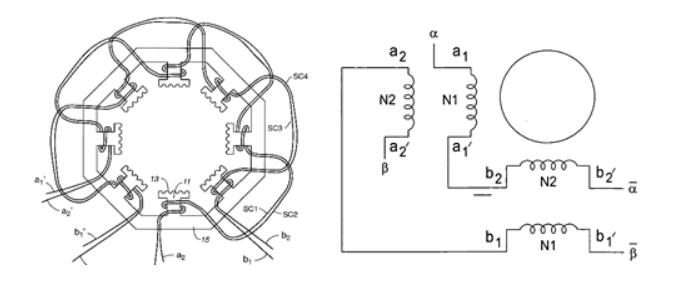
Рисунок 4. Настройка намотки Т-образного соединения
Т-образное соединение также приводит к тому, что постоянно включены 2 фазы. Результат T-соединения аналогичен R-обмотке: включение обеих фаз может снизить вибрацию. Кроме того, уровень индуктивности Т-образного соединения находится между последовательным и параллельным соединением. Таким образом, Т-образное соединение может обеспечить уровень производительности между последовательным соединением и параллельным соединением: более высокий крутящий момент при низкой скорости по сравнению с параллельным соединением и более высокий крутящий момент при высокой скорости по сравнению с последовательным соединением.
8. Увеличение количества фаз
Двигатель с большим количеством фаз будет иметь меньший угол шага, аналогичный микрошаговому режиму и может уменьшить энергию возбуждения для вращения ротора. По мере уменьшения энергии возбуждения резонансы будут устраняться.
2-фазный двигатель имеет 8 магнитных полюсов, в то время как 5-фазный двигатель имеет 10 полюсов. 5 — фазный двигатель имеет 2 полюса на фазу, поэтому ротор будет перемещаться на 1/10 шага зуба статора, чтобы перейти на следующую фазу. В результате 5-фазный двигатель имеет 500 шагов на оборот и 0,72° на шаг. Более высокое разрешение вращения требует меньшей энергии возбуждения для вращения ротора, следовательно, меньшего превышения скорости ротора.
Если будет реализован микрошаг, 5-фазный двигатель сможет работать с еще более высоким разрешением, а вибрация будет в значительной степени снижена.
Механическое демпфирование:
1. Установка механического демпфера

Рисунок 5. Механический демпфер NEMA 23.
Механический демпфер на шаговом двигателе может добавить дополнительную инерцию на валу, а также, помочь поглотить вибрацию и обеспечить стабильный эффект демпфирования. Фланцевое крепление также может поглощать вибрацию.
2. Регулировка инерции ротора
Резонанс двигателя может быть определен соотношением , где K-жесткость крутящего момента, а J-инерция. Диапазон резонанса может изменяться из-за демпфирующего эффекта инерции нагрузки. Регулируя инерцию ротора путем изменения материалов, размеров (например, большей длины ротора) или конструкции (например, конструкция полого вала “автомобильное колесо”, показанная на рисунке 6), мы можем сдвинуть точку резонанса, чтобы уменьшить вибрацию.
Рисунок 6. Дизайн ротора “Автомобильное колесо”.
3. Регулировка воздушного зазора для увеличения или уменьшения жесткости крутящего момента
Воздушный зазор между ротором и зубом статора связан с величиной крутящего момента, который может генерировать двигатель. Изменяя расстояние воздушного зазора, мы можем регулировать жесткость двигателя по крутящему моменту. В результате мы можем сдвинуть точку резонанса, чтобы избежать вибрации.
4. Изменение инерции нагрузки
Инерция — это сопротивление объекта ускорению или замедлению. Если двигатель под нагрузкой, аналогичную механическому демпферу, инерция ротора будет намного больше, а колебания существенно уменьшатся.

