Шаговые двигатели
Шаговые двигатели




Шаговые двигатели относятся к синхронным бесщеточным моторам , лишенным ротора с коммутатором и угольных щеток. При этом имеются ротор , состоящий из многочисленных (до нескольких сотен) постоянных магнитных зубьев, и статор с отдельными обмотками . Это электромеханическое устройство преобразует цифровой входной импульс в механический ход, перемещение происходит не непрерывно, а по принципу шагов (дискретно). Обратившись в компанию АНТРИБ, вы можете купить надежные шаговые двигатели марки HIWIN mikrosystem с доставкой по Москве и в любую точку мира.
Применение
Шаговый двигатель идеален для устройств, где необходимо точное позиционирование и повторяемость, реверсивный ход и большая вариативность скорости. Такие моторы устанавливаются в дисководах, принтерах, плоттерах, сканерах, факсах, а также в автомобилях, разнообразном промышленном оборудовании и высокоточной робототехнике.
С переменным магнитным сопротивлением . Такие моторы имеют несколько полюсов на статоре и не намагниченный ротор с зубчатым колесом. Этот двигатель дает небольшой крутящий момент, зато отсутствует стопорящий эффект.
С постоянными магнитами . Данные двигатели состоят из статора с обмотками, и ротора с дисковым магнитом на нем. Благодаря этому создается больший магнитный поток и, соответственно, больший момент, чем у вышеназванных моторов.
Гибридные . Эти двигатели сочетают в себе преимущества предшествующих видов, отличаются минимальной величиной шага , что обеспечивает максимальную точность работы, а также высоким крутящим моментом и лучшими скоростными показателями.
Преимущества и недостатки
К преимуществам мощных шаговых двигателей относятся:
точность величины шага,
быстрые запуск и остановка,
высокая надежность при значительных нагрузках,
точное позиционирование без дополнительных устройств обратной связи,
широкий диапазон скоростей,
простота в использовании.
Однако для шаговых двигателей характерно явление резонанса, вероятна потеря контроля положения за счет того, что работа осуществляется без обратной связи. Мотор потребляет энергию даже без нагрузки на него, а на высокой скорости работа затрудняется. Кроме того, оборудование отличается низкой удельной мощностью и достаточно сложен в управлении .
Купить шаговые двигатели в Москве
В нашем интернет-магазине Антриб вы сможете купить мощные шаговые двигатели в Москве по доступной цене!
Электромеханический реверсивный шаговый двигатель




Владельцы патента RU 2267857:
Изобретение относится к области электротехники и может быть использовано в качестве исполнительного устройства дискретного привода в автоматических системах с цифровым управлением. Шаговый двигатель содержит кривошипный вал и два установленных в корпусе аналогичных электромагнита, на осях якорей каждого из которых жестко закреплена кулиса, охватывающая своей вилкой цапфу кривошипного вала. Оси кулис смещены относительно друг друга. Кулисы образуют угол больше 0° и меньше 180° и соединены соответствующими упругими связями с корпусом. Кривошипный вал установлен с возможностью взаимодействия с обеими кулисами в процессе его поворота как в прямом, так и в обратном направлении. Технический результат заключается в повышении быстродействия, обеспечении реверсирования без усложнения конструкции двигателя, а также исключении необходимости соблюдения сложных зависимостей между размерами деталей двигателя. 3 ил.
Изобретение относится к электротехнике и может быть использовано в качестве исполнительного устройства дискретного привода в автоматических системах с цифровым управлением.
Известны шаговые двигатели, представляющие собой синхронные электродвигатели, в которых электрические импульсы в обмотках преобразуются при взаимодействии магнитных полей якоря и статора в дискретные угловые перемещения якоря, такие, например, как шаговые двигатели, описанные в книге Д.Э.Брускина, А.Е.Зороховича, В.С.Хвостова «Электрические машины и микромашины» (М., «Высшая школа», 1990 г. стр.389÷398) или, например, шаговый двигатель по патенту РФ №2101840, м. кл. Н 02 К 37/00, Н 02 Р 8/00, опубликованному 10.01.98 г.
Общим недостатком этих двигателей является низкий КПД (порядка 0,01 и менее) и низкий стопорный момент в обесточенном положении прибора, который не превышает величину 0,1. 0,2 номинального момента.
Известны электромеханические шаговые двигатели, в которых электрические импульсы в обмотках электромагнитов преобразуются в дискретные условия перемещения выходного вала в результате механических связей между якорем и выходным валом, например храповым механизмом, такие как шаговый электродвигатель по авторскому свидетельству СССР №1023567, м. кл. Н 02 К 37/00, опубликованному 15.06.83 г., или шаговый электродвигатель по патенту РФ №2077108, м. кл. Н 02 К 37/00, 7/06, опубликованному 10.04.97 г.
Эти шаговые электродвигатели имеют достаточно высокий стопорный момент, но их недостатком является малый КПД (порядка 0,01) и малый ресурс работы вследствие ударного режима работы деталей (наличия соударяющихся элементов).
Низкий КПД указанных двигателей обусловлен принципом работы — необходимостью быстрого разгона якоря и последующего торможения, которое в первой указанной группе двигателей осуществляется тормозными электромагнитными обмотками, а во второй — механическим торможением деталей. Таким образом, энергия, затраченная на разгон якоря и приводимого им механизма, в первом случае должна быть погашена энергией, затрачиваемой на торможение, а во втором случае расходуется на удар о стопорное устройство.
Наиболее близким по совокупности признаков к предлагаемому техническому решению является электромеханический шаговый двигатель по а.с. СССР №288109, м. кл. Н 02 К 37/00, опубликованный 03.12.70.
Известный шаговый двигатель, как и заявляемый, содержит выходной кривошипный вал и неподвижно установленный в корпусе электромагнит, на оси якоря которого жестко закреплена кулиса, охватывающая своей вилкой цапфу кривошипного вала.
В отличие от предлагаемого двигателя известный двигатель содержит также рычаг и коромысло, причем рычаг связан возвратной пружиной с корпусом и второй пружиной — с нижним концом коромысла, верхний конец которого третьей пружиной связан с корпусом.
Известный шаговый двигатель обладает высоким КПД и ресурсом работы. Высокий КПД обусловлен тем, что энергия притяжения якоря преобразуется механизмом шагового двигателя на первом участке, когда якорь притягивается, при совершении полезной работы, в энергию разгона кривошипа и энергию натяжения пружин, которые на втором участке, при отпускании якоря, преобразуются в полезную работу на привод механизма. Высокий ресурс определяется отсутствием в конструкции соударяющихся и трущихся деталей и минимальным износом взаимодействующих между собой поверхностей.
Однако известный двигатель обладает следующими недостатками:
1. Быстродействие двигателя ограничено, что обусловлено следующими причинами:
— коромысло, смонтированное на цапфе выходного кривошипного вала, и подвижные элементы опоры обладают значительными массами и соответственно моментами инерции;
— максимальная величина момента, создаваемая пружинным механизмом, который должен преодолеть электромагнит, почти в три раза превосходит средний момент, создаваемый пружинами на рабочем участке. Соответственно в механизме создаются большие усилия, требующие для обеспечения прочности увеличения размеров деталей, что приводит к увеличению моментов инерции и, в конечном итоге, не позволяют при увеличении мощности электромагнита в соответствующей степени увеличить быстродействие механизма.
2. Номенклатура шаговых двигателей по а.с. №288109 ограничена, что обусловлено тем, что геометрические параметры деталей механизма двигателя, такие как радиус кривошипа, длины плеч коромысла, длины рычагов и т.п., для обеспечения рабочего момента на выходном валу связаны между собой сложными зависимостями и не могут быть заданы произвольно. Поэтому, например, уменьшение радиуса кривошипа уменьшает ход коромысла, соответственно уменьшает момент для преодоления мертвой точки, требует увеличения длины рычага и т.д., что препятствует созданию двигателя с меньшей мощностью и большей частотой срабатывания.
3. Область применения известного двигателя ограничена, поскольку для его реверсирования необходимо переключающее электромеханическое устройство, изменяющее положение зацепа пружины, который связывает верхний конец коромысла с корпусом, что существенно усложняет конструкцию и схему управления, и, кроме того, сдвигает исходное положение кривошипного вала при реверсе на некоторый угол от исходного положения при прямом ходе (примерно 10% полного углового шага) и, следовательно, не позволяет проводить реверсирование с достаточной точностью.
В основу изобретения поставлена задача создать такой электромеханический реверсивный шаговый двигатель, в котором введение второго электромагнита с кулисой, смещение осей кулис относительно друг друга с образованием угла между кулисами больше 0° и меньше 180°, установка кривошипного вала с возможностью взаимодействия с обеими кулисами как в прямом, так и в обратном направлениях, позволило бы уменьшить моменты инерции выходного вала двигателя и, следовательно, повысить его быстродействие; исключить необходимость соблюдения сложных зависимостей между размерами деталей двигателя и, следовательно, расширить номенклатуру двигателей; обеспечить реверсирование двигателя без усложнения его конструкции с обеспечением достаточной точности и, таким образом, расширить область его применения.
Кроме того, предлагаемое изобретение обеспечивает получение дополнительного результата — упрощения двигателя, поскольку за счет введения новых признаков в предложенном двигателе отсутствуют рычаг и коромысло, а также обеспечивающие их упругую связь между собой и с корпусом пружины.
Поставленная задача решается тем, что в электромеханический шаговый двигатель, содержащий выходной кривошипный вал и неподвижно установленный в корпусе электромагнит, на оси якоря которого жестко закреплена кулиса, охватывающая своей вилкой цапфу кривошипного вала, согласно изобретению, введены следующие существенные признаки, отличные от прототипа.
В заявляемый электродвигатель введен аналогичный электромагнит с кулисой, оси кулис смещены относительно друг друга, причем кулисы образуют угол больше 0° и меньше 180° и соединены соответствующими упругими связями с корпусом, а кривошипный вал установлен с возможностью взаимодействия с обеими кулисами как в прямом, так и в обратном направлениях.
Введение второй подпружиненной кулисы, расположенной под некоторым углом к первой и установленной на оси якоря аналогичного электромагнита, позволяет не только увеличить быстродействие за счет уменьшения моментов инерции движущихся масс и снижения максимальных нагрузок на механизм, но и расширить диапазон номенклатуры создаваемых двигателей как в сторону увеличения, так и уменьшения мощности за счет устранения геометрических зависимостей между деталями механизма. Выполнение кривошипного вала взаимодействующим с обеими кулисами позволяет производить реверсирование простым изменением порядка поступление импульсов в обмотки электромагнитов.
На фиг.1 приведена кинематическая схема заявляемого двигателя, на фиг.2 — циклограмма крутящих моментов, создаваемых пружинами на выходном кривошипном валу шагового двигателя, на фиг.3 — диаграмма управляющих импульсов.
Электромеханический реверсивный шаговый двигатель содержит две кулисы 1, 2, выходной вал 3 с кривошипом 4. Кулисы 1, 2 установлены соответственно на вращающихся осях 5, 6 якорей 7, 8 электромагнитов 9, 10. Кулисы 1, 2 соответственно пружинами 11, 12 связаны с корпусом 13.
Кулисы 1, 2 охватывают своими вилками цапфу кривошипа 4 выходного вала 3. Оси 5, 6 смещены относительно друг друга таким образом, что кулисы 1, 2 образуют угол, величина которого больше 0° и меньше 180°.
Предлагаемый двигатель работает следующим образом. В исходном положении механизм находится в устойчивом уравновешенном состоянии под действием пружин 11, 12.
На циклограмме (фиг.2) указаны положения верхних мертвых точек (ВМТ) и нижних мертвых точек (НМТ) деталей механизма. Выше оси абсцисс (фиг.2) показаны положительные моменты, создаваемые пружинами 11, 12 при вращении выходного кривошипного вала 3 по часовой стрелке. Ниже от абсцисс — отрицательные моменты. Соответственно при вращении выходного кривошипного вала 3 против часовой стрелки положительные моменты, направленные в сторону вращения, располагаются под осью абсцисс. При подаче импульса тока в обмотку одного из электромагнитов (ЭМ), например 9 (фиг.3а), якорь 7, притягиваясь под действием электромагнитного поля к сердечнику, увлекает за собой кулису 1, которая, поворачиваясь вокруг оси 5 по часовой стрелке, вилкой давит на цапфу кривошипа 4 выходного вала 3 и растягивает пружину 11. Под действием кулисы 1 и кулисы 2, притягиваемой пружиной 12, кривошип 4 выходного вала 3 начинает поворачиваться по часовой стрелке до верхней мертвой точки пары кулиса 2 — кривошип 4. Вблизи мертвой точки в обмотку электромагнита 10 подается импульс тока (фиг.3б) и якорь 8, притягиваясь к сердечнику, разворачивает кулису 2 вокруг оси 6 против часовой стрелки, растягивая пружину 12. Кулиса 2 вилкой давит на кривошип 4 в направлении вращения выходного вала 3 по часовой стрелке. Вблизи нижней мертвой точки пары кулиса 1 — кривошип 4 с обмотки электромагнита 9 снимается напряжение, и кулиса 1, разворачиваясь под действием пружины 11 против часовой стрелки, помогает электромагниту 10 двигать выходной кривошипный вал 3 по часовой стрелке до нижней мертвой точки пары кулиса 2 — кривошип 3, вблизи которой с электромагнита 10 снимается напряжение. Движение выходного кривошипного вала 3 до исходного положения продолжается под суммарным воздействием пружины 11 и 12. Вращение в обратном направлении происходит при подаче импульса тока сначала в обмотку электромагнита 10 (фиг.3в), а затем в обмотку электромагнита 9 (фиг.3г).
Таким образом, введение новых признаков позволило создать электромеханический шаговый двигатель с возможностью реверсирования, с высоким КПД, ресурсом работы, быстродействием и более широким диапазоном мощностей.
Электромеханический реверсивный шаговый двигатель, содержащий выходной кривошипный вал и неподвижно установленный в корпусе электромагнит, на оси якоря которого жестко закреплена кулиса, охватывающая своей вилкой цапфу кривошипного вала, отличающийся тем, что в него введен аналогичный электромагнит с кулисой, оси кулис смещены относительно друг друга, причем кулисы образуют угол больше 0° и меньше 180° и соединены соответствующими упругими связями с корпусом, а кривошипный вал установлен с возможностью взаимодействия с обеими кулисами в процессе его поворота как в прямом, так и в обратном направлениях.
1 шт. SAMIORE Робот 2 Двигатель постоянного тока Привод модуль Реверсивный ШИМ скорость двойной H Мост шаговый двигатель мини Виктори L298N
Последнее обновление: 10.06.2020












Модуль привода двигателя очень подходит для использования в интеллектуальном автомобиле с питанием от аккумулятора, игрушечном автомобиле, Роботе и т. д. Напряжение питания 2V
10V может одновременно двух устройств двигатель постоянного тока или 1 4 линии 2-фазный шаговый двигатель, может обеспечить положительный и функция контроля скорости, каждый ток для 1.5A A постоянного тока. Пиковый ток до 2,5a, с тепловой защитой и автоматическим восстановлением. Основные характеристики продукта: 1 импортный профессиональный чип драйвера двигателя, встроенный переключатель сопротивления низкой проводимости MOS, минимальный нагрев, без радиатора, небольшой объем, энергосбережение, ваш идеальный выбор для питания от аккумулятора. (L298N внутренний транзисторный переключатель, низкая эффективность, высокая температура, без тепла, большой объем, рынок L298N легко выгорает, не используйте оригинальные чипы, этот продукт может быть идеальной заменой.) 2 dual 1.5A * 2, пиковый ток до 2.5A, встроенная защита от перегрева, не бойтесь сгорания двигателя, автоматическое восстановление после падения температуры. (Салона автомобиля напряжение и ток на рынке, в течение этого диапазона) 3 маленький размер, светильник вес, 0 Ток холостого хода, Ваш идеальный выбор для модели транспортного средства Параметры продукта: H Мост Двигатель двойной привод, и может управлять двумя двигателями постоянного тока или 1 линия 4 фазы шагового двигателя; напряжение источника питания Модуль 2V-10V; Сигнал входное напряжение 1,8-7V; Одноканальный ток 1.5A, максимальный ток до 2.5A, Низкий ток в режиме ожидания (менее 0,1ua); Встроенный Общий контур проводимости, входной конец приостановлен, двигатель не будет неисправен; встроенная схема защиты от перегрева с эффектом гистерезиса (TSD), нет необходимости беспокоиться о стойле двигателя; Размер продукта: 24,7*21*5 мм (ДхШхВ), Ультра маленький размер, Подходит для сборки и транспортного средства; Диаметр монтажного отверстия: 2 мм.
РЕВЕРСИВНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ Советский патент 1966 года по МПК H02P8/20
Описание патента на изобретение SU177959A1
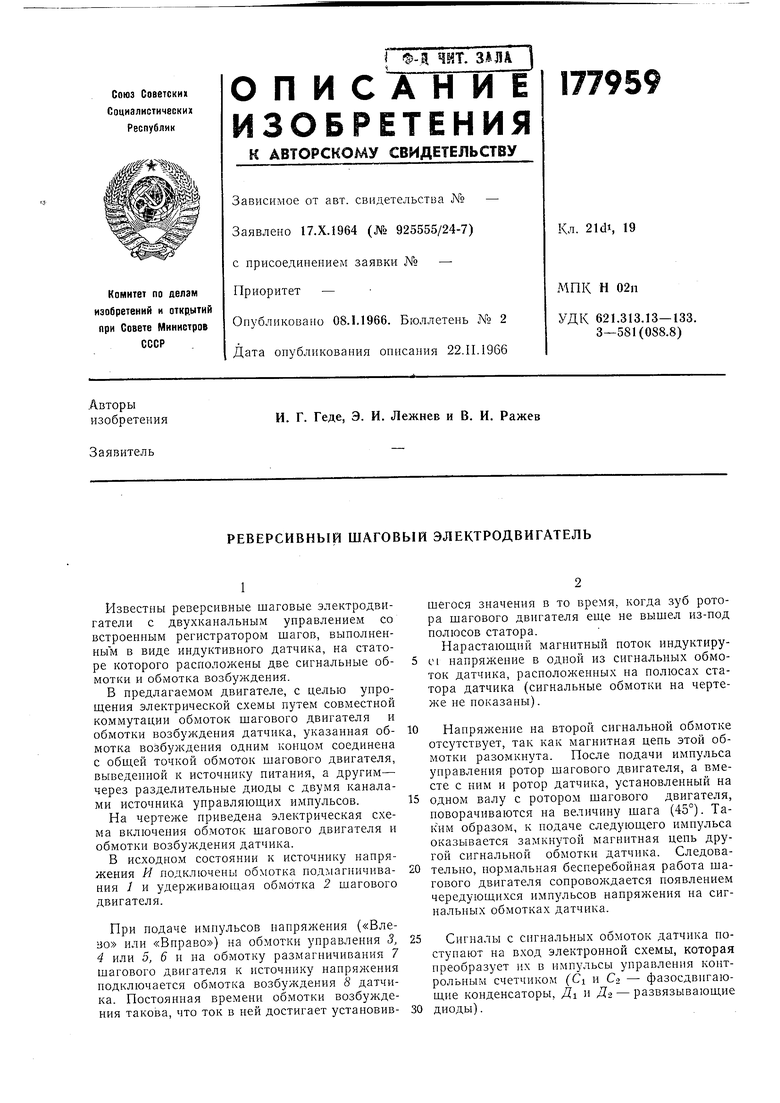
Известны реверсивные шаговые электродвигатели с двухканальным управлением со встроенным регистратором шагов, выполненным в виде индуктивного датчика, на статоре которого расположены две сигнальные обмотки и обмотка возбуждения.
В предлагаемом двигателе, с целью упрощения электрической схемы путем совместной коммутации обмоток шагового двигателя и обмотки возбуждения датчика, указанная обмотка возбуждения одним концом соединена с обш,ей точкой обмоток шагового двигателя, выведенной к источнику питания, а другим- через разделительные диоды с двумя каналами источника управляющих импульсов.
На чертеже приведена электрическая схема включения обмоток шагового двигателя и обмотки возбуждения датчика.
В исходном состоянии к источнику напряжения Я подключены обмотка иодмагпичивания / и удерживающая обмотка 2 шагового двигателя.
При подаче импульсов напряжения («Влево или «Вправо) на обмотки управления 3, 4 или 5, 6 и на обмотку размагничивания 7 шагового двигателя к источнику напрялсения подключается обмотка возбуждения 8 датчика. Постоянная времени обмотки возбуждения такова, что ток в ней достигает установившегося значения в то время, когда зуб ротора шагового двигателя еще не вышел из-под полюсов статора.
Нарастающий магнитный поток индуктиру(.4 напряжение в одной из сигнальных обмоток датчика, расположенных на полюсах статора датчика (сигнальные обмотки на чертеже не показаны).
Напряжение на второй сигнальной обмотке отсутствует, так как магнитная цепь этой обмотки разомкнута. После подачи импульса управления ротор шагового двигателя, а вместе с ним и ротор датчика, установленный на
одпом валу с ротором шагового двигателя, поворачиваются на величину шага (45°). образом, к нодаче следующего импульса оказывается замкнутой магнитная цепь другой сигнальной обмотки датчика. Следовательно, нормальная бесперебойная работа шагового двигателя сопроволадается появлением чередующихся импульсов напрял ения на сигнальных обмотках датчика.
Сигналы с сигнальных обмоток датчика поступают на вход электронной схемы, которая преобразует их в импульсы управления контрольным счетчиком (С и С — фазосдвигающие конденсаторы, Д- и До — развязывающие
Реверсивный шаговый электродвигатель с двухканальным управлением со встроенным регистратором шагов, выполненным в виде индуктивного датчика, на статоре которого располол ены две сигнальные обмотки и обмотка возбуждения, отличающийся тем, что, с целью упрощения электрической схемы нутем совместной коммутации обмоток шагового двигателя и обмотки возбуждения датчика, указанная обмотка возбуждения одним концом соединена с обш;ей точкой обмоток шагового двигателя, выведенной к источнику питания, а другим — через разделительные диоды с двумя каналами источника управляющих импульсов,