Что такое степень дросселирования двигателя
Дросселирование
Дросселирование (от нем. drosseln — ограничивать, глушить) — понижение давления газа или пара при протекании через сужение проходного канала трубопровода — дроссель, либо через пористую перегородку.
Содержание
- 1 Количественное рассмотрение
- 2 Эффект Джоуля-Томсона для газа Ван-дер-Ваальса
- 3 Свойства
- 4 Применение
- 5 Источники
Количественное рассмотрение [ править | править код ]
Дросселирование является близким к идеальному осуществлением процесса Джоуля-Томсона. Дросселирование можно рассматривать [1] как изоэнтальпийный квазиравновесный процесс.
Для идеального газа эффект принципиально нулевой, поэтому необходимо использовать более точную модель, часто используют газ Ван-дер-Ваальса. В общем случае для процесса Джоуля-Томсона можно написать:
( Δ T Δ P ) I = T ( ∂ V ∂ T ) P − V C P -V> over окончательный результат будет зависеть от используемой модели газа. Дифференциальным эффект называют тогда, когда Δ P Если разность давлений и температур значительная (разность давлений может составлять сотни атмосфер), то имеем интегральный эффекта Джоуля-Томсона, интегрирование можно провести следующим образом: T 2 − T 1 = ∫ P 1 P 2 ( ∂ T ∂ P ) I d P = ∫ P 1 P 2 T ( ∂ V ∂ T ) P − V C P d P -V> over Уравнение Ван-дер-Ваальса создано с учетом слабых эффектов — взаимодействия молекул газа между собой и конечных размеров молекул газа (для идеального газа молекулы — материальные точки и они взаимодействуют только при ударе). В целом свойства такого газа очень мало отличаются от свойств идеального газа — за исключением отдельных областей параметров (например, при конденсации газа). Газ Ван-дер-Ваальса дает качественное описание поведения газов при конденсации и для эффекта Джоуля-Томсона. При этом количественно часто получаются параметры достаточно далекие от реальности. При этом для дифференциального эффекта при достаточно разреженном газе получаем следующий результат: Δ T Δ P = 2 a R T − b C P из формулы видно, что газ при дросселировании может как охлаждаться, так и нагреваться в зависимости от знака верхней части дроби, причем видно, что существует температура инверсии дифференциального эффекта Джоуля-Томсона, при которой меняется знак эффекта. T i = 2 a R b где a и b — параметры в формуле Ван-дер-Ваальса. При проведении процесса ниже температуры инверсии газ в процессе охлаждается, при проведении процесса выше температуры инверсии — газ нагревается. При этом процесс с охлаждением называется положительным, при нагреве — отрицательным. Обычно температура инверсии значительно выше комнатной, поэтому практически все газы в этом процессе охлаждаются. Но у водорода и гелия температура инверсии низкая, поэтому эти газы при дросселировании нагреваются. (температура инверсии водорода около -80°Ц.) Сильно сжатый водород при дросселировании может вспыхнуть, это нужно учитывать, так как водород очень хорошо просачивается сквозь мельчайшие поры и даже через некоторые материалы. Существует также рассмотрение дифференциального эффекта Джоуля-Томсона для сильно сжатых газов и интрегрального эффекта для газа Ван-дер-Ваальса, основные свойства этих процессов похожи. [1] Процесс дросселирования не квазистатический, равновесны только начальное и конечное, но не промежуточные состояния. Рассмотрение процесса дросселирования как квазистатического возможно только потому, что путь перехода из начального состояния в конечное здесь не важен, и можно заменить его некоторой теоретической квазистатической абстракцией. При дросселировании происходит адиабатное расширение от давления P1 до давления P2 без совершения работы, то есть дросселирование — существенно необратимый [2] процесс, сопровождающийся увеличением энтропии и объёма при постоянной энтальпии. Эффект дросселирования применяется в промышленности в расходомерах переменного давления [2] , в которых расход газа или пара измеряется по перепаду давления P1 — P2 перед и после сужения проходного канала (диафрагма или сопло в трубе Вентури) трубопровода. Дросселирование применяется в компрессионных холодильниках в качестве средства обеспечения перепада давления для испарения сжиженного хладагента. Дроссельными характеристиками называют зависимости тяги и удельного расхода топлива ГТД от частоты вращения одного из роторов (или расхода топлива) при заданных условиях полета и принятой программе управления. Дросселирование двигателя в целях снижения его тяги осуществляется снижением подачи топлива в камеру сгорания за счет уменьшения угла установки РУД. Основным управляющим фактором при этом является расход топлива Gт. Объясним качественный характер протекания дроссельных характеристик на примере ТРД при условии, что дросселирование осуществляется при Fкр = const. Рис. 4.8. Дроссельные характеристики ТРД На рис. 4.8 показано два способа изображения стендовых дроссельных характеристик ТРД: в виде зависимостей удельного расхода топлива от тяги (рис. 4.8 а) и в виде зависимостей Р и Суд от Протекание дроссельных характеристик двигателя определяется параметрами его рабочего процесса. Характер изменения наиболее важных из них представлен на рис. 4.9. Здесь показано изменение от Тяга при дросселировании двигателя, как видно из рис. 4.8, интенсивно снижается, что обусловлено уменьшением как удельной тяги, так и расхода воздуха. Уменьшение Gв вызвано со снижением Одновременное снижение параметров p и D при дросселировании двигателя приводит к уменьшению работы цикла и удельной тяги. Следует особо отметить, что температура Рис. 4.9. Зависимость основных параметров ТРД от На пониженных частотах вращения при приближении к режиму МГ в стендовых условиях возможно уменьшение интенсивности снижения и даже увеличение температуры Удельный расход топлива вначале незначительно уменьшается, вблизи режима «кр» достигает минимального значения, а затем увеличивается вплоть до режима МГ (рис. 4.8). На удельный расход топлива оказывают влияние два противоположно действующих фактора: снижение внутреннего КПД и увеличение тягового КПД. Внутренний КПД снижается по причине одновременного уменьшения параметров рабочего процесса p и D. Поэтому глубокое дросселирование ГТД любого типа всегда связано со значительным уменьшением внутреннего КПД hвн и полного КПД hп = hвнhтяг и увеличением удельного расхода топлива Суд = (рис. 4.9 в). Современные ГТД, как отмечалось ранее, имеют на максимальном режиме температуру Характеристики двухконтурных ТРД (ТРДД) В ТРДД, используемых на дозвуковых транспортных и гражданских самолетах, характерно применение сравнительно высоких степеней двухконтурности. Это обусловлено требованием получения хорошей экономичности и соответственно низких удельных расходов топлива. У этих ТРДД, по мере их развития, степени двухконтурности m = GвII/GвI и параметры рабочего процесса Рис. 4.10. Изменение параметров рабочего процесса и удельных параметров ТРДД в ходе их развития: I, II, III – поколения Повышение степени двухконтурности m приводит к возрастанию тягового КПД двигателя Но увеличение степени двухконтурности неизбежно приводит к уменьшению удельной тяги двигателя, а вследствие этого увеличивается расход воздуха, требуемый для получения заданной тяги. Это вызывает увеличение габаритных размеров и в первую очередь миделя таких ТРДД. Рис. 4.11. Влияние режима работы двигателя (а) и условий полета (б) на степень двухконтурности ТРДД Степень двухконтурности m у ТРДД являетсяфункцией от приведенной частоты вращения компрессора nк.при при этом весьма существенно изменяется при изменении скорости, высоты полета и частоты вращения ротора двигателя. Качественный характер изменения m от Весьма значительная зависимость степени двухконтурности от режима работы двигателя, скорости и высоты полета наряду с низкими абсолютными значениями удельных тяг являются теми отличительными особенностями, которые влияют на протекание высотно-скоростных и дроссельных характеристик ТРДД по сравнению с соответствующими характеристиками ТРД. Ниже дается объяснение характеру протекания характеристик двухконтурных двигателей двух основных типов: ТРДД (без смешения и со смешением потоков контуров), а также производится сравнение их характеристик с характеристиками ГТД прямой реакции других типов. С. Ю. Улыбышев * Центральный научно-исследовательский институт химии и механики Поступила в редакцию 20.02.2018 Представлен алгоритм управления многосопловой двигательной установкой космического аппарата в режиме тактовой работы, который дает возможность варьировать в широком диапазоне временем ее работы и заданной тягой, среднее значение которой поддерживается с высокой степенью точности. Рассматриваются результаты моделирования применительно к осевой двигательной установке космического аппарата, состоящей из четырех номинально равнотяговых двигателей. Применение алгоритма к указанной компоновке двигательной установки позволяет на фоне решения основной задачи по выдачи корректирующего импульса с заданным средним уровнем тяги парировать набор кинетического момента по всем трем центральным осям инерции космического аппарата. В работе описана схема алгоритма управления и особенности использования уточненной математической модели работы двигателей в тактовом режиме. Введение. Для управления движением космического аппарата (КА) как при перемещении центра масс, так и вращении вокруг него получили широкое применение методы совместного управления группой двигателей, объединенных в двигательную установку (ДУ) с векторами тяг, не проходящими через центр масс и расположенными под углом друг к другу [1–4]. Это позволяет одновременно решать задачи орбитального маневрирования и управления ориентацией КА. В некоторых случаях, особенно для миссий дальнего космоса, при полете КА к другим планетам и их спутникам, используются комбинированные ДУ [5]. В их состав входят двигатели большой тяги для перемещения в окрестность данных небесных тел и малой тяги для коррекции орбиты в поле их притяжения. Отдельным направлением стала разработка и применение электрореактивных двигательных установок (ЭРДУ) и алгоритмов управления ими [6]. Особенностью данных двигателей является очень малая тяга при высоком удельном импульсе, что позволяет минимизировать расход топлива, но сопряжено с многократным увеличением длительности коррекции орбиты [7]. В результате, активный участок полета КА с ЭРДУ может занимать несколько десятков витков, а выведение КА с низкой круговой орбиты на геостационарную с использованием таких двигателей может достигать нескольких месяцев [7–9]. В работе [10] рассматривается совместное управление несколькими двигателями с расчетом коэффициентов дросселирования для создания требуемого суммарного уровня тяги при реализации орбитальных маневров. В данной статье предложен схожий способ управления многосопловой ДУ или группой двигателей, объединенных в один блок, но имеющий принципиальные отличия. Во-первых, на фоне решения основной задачи по выдаче импульса требуемой величины и направления парируется накопление КА кинетического момента по всем трем центральным осям инерции аппарата. Во-вторых, разработана математическая модель работы ДУ в режиме тактовой работы (РТР) [11], когда на каждом интервале работы ДУ (такте) одновременно включаются все двигатели, а времена их отключения рассчитываются алгоритмически из условий ограничения накопления кинетического момента и создания заданной средней величины тяги внутри такта [12–15]. Это позволяет использовать двигатель как при непрерывной работе, так и в режиме, близком к импульсному, обеспечивая создание заданной средней тяги ДУ в широком диапазоне. Большинство алгоритмов управления ДУ имеют в контуре обратной связи показания акселерометров, по которым рассчитывается приращение скорости и происходит отключение двигателей после набора заданной величины характеристической скорости Vx [16]. Данный подход является эффективным при выдаче импульса для линейного перемещения КА. Однако в случае решения задачи вращения вокруг центра масс и стабилизации с помощью ДУ, когда по датчикам угловой скорости контролируется обеспечение требований по построению и удержанию заданной ориентации, длительности включения двигателей определяются из условия создания моментов требуемой величины и направления. Вследствие этого КА, в общем случае, получает дополнительно линейное перемещение, которое приводит к возмущениям его орбиты. Также недостатки указанного подхода к отсечке тяги ДУ проявляются при выдаче микроимпульсов, когда длительность открытия клапана двигателя соизмерима с интервалом реакции системы управления на полученное приращение скорости и отработки команды на закрытие клапанов или если величина создаваемого ускорения находится на уровне собственных шумов акселерометра. В связи с этим представляет определенный практический интерес разработка алгоритма управления ДУ, основанного на достаточно точной математической модели ее работы и позволяющего обеспечить высокоточное маневрирование независимо от наличия на борту КА показаний дополнительных измерителей, в частности акселерометров. 1. Постановка задачи. Пусть на КА установлены управляющие двигатели-маховики (УДМ) по всем трем центральным осям инерции, формирующим базовую систему координат (БСК) аппарата, которые используют для построения требуемой ориентации в пространстве. Необходимо выбрать компоновку ДУ и разработать алгоритм управления, обеспечивающие: выдачу импульса с заданным средним интегральным уровнем тяги на протяжении всего интервала маневрирования; максимально эффективный расход топлива на перемещение центра масс КА; ограничение накопления кинетического момента по всем трем центральным осям инерции КА на интервале выдачи импульса; стабилизацию КА и удержание заданного направления результирующего вектора тяги в пространстве. При этом данный алгоритм в общем случае не использует показания акселерометров в контуре обратной связи для определения моментов времени выключения двигателей после набора заданного Vx. 2. Компоновка ДУ. Для обеспечения выполнения всех сформулированных выше требований предлагается компоновка ДУ в виде блока из четырех номинально равнотяговых двигателей, расположенных равномерно на окружности радиуса R, ортогональной оси YБСК, и имеющих малое отклонение вектора тяги от продольной плоскости (YБСКZБСК – для Д1 и Д3, YБСКXБСК – для Д2 и Д4) на угол α только в перпендикулярном ей направлении [17]. Ниже (рис. 1) представлен схематичный внешний вид расположения ДУ на корпусе КА. Как показано на фронтальной проекции (рис. 2), указанное малое отклонение вектора тяги двигателей обеспечивает создание моментов на плече R вокруг оси YБСК, которая сонаправлена с результирующим вектором тяги ДУ. Такая конструкция ДУ может быть предпочтительной для малых КА, которые имеют очень жесткие требования к габаритам и компоновке всего оборудования. Изобретение относится к ракетной технике и может быть использовано при разработке жидкостных ракетных двигателей с изменяемой в широком диапазоне тягой. В практике реализации космических программ двигатели с глубоким дросселированием тяги в основном предназначены для применения в составе посадочных платформ — последних ступеней ракетно-космических комплексов (РКК) для обеспечения их мягкой посадки на планеты Солнечной системы с разреженной атмосферой или при ее отсутствии. В частности, такие двигатели применялись в составе посадочных модулей РКК «Apollo» (с пятикратным дросселированием тяги) и «Луна-16» (с трехкратным дросселированием тяги). Наряду с требованием глубокого дросселирования тяги для таких двигателей (двигателей последних ступеней РКК) весьма актуальным является требование их экономичности, то есть высокого удельного импульса во всем диапазоне изменения тяги, так как увеличение массы необходимого для осуществления мягкой посадки запаса топлива прямо связано с уменьшением массы полезной нагрузки посадочной платформы. Однако удельные импульсы известных (в том числе вышеуказанных) двигателей не отвечают этому требованию по следующим причинам. В двигателе посадочного модуля РКК «Apollo» осуществляется способ дросселирования тяги камеры, основанный на уменьшении расходов компонентов топлива с поддержанием постоянных перепадов давления на форсунках, необходимых для распыла компонентов топлива, во всем диапазоне изменения тяги за счет уменьшения площадей проходных сечений регулируемых форсунок, механизм регулирования которых кинематически связан с приводом дросселей, обеспечивающих уменьшение расходов компонентов топлива в камеру посредством уменьшения их проходных сечений и соответственно увеличения гидросопротивлений магистралей питания камеры компонентами топлива. Схема этого двигателя представлена в книге Б.Ф. Гликмана «Автоматическое регулирование жидкостных ракетных двигателей», Москва, 1974 г., стр. 348, рисунок 9.6. Однако применение такого способа невозможно при исполнении форсуночной головки камеры с большим количеством мелкомасштабных форсунок, обеспечивающих более качественный распыл и, соответственно, смешение компонентов топлива в камере, что обусловливает высокую полноту сгорания в камере и, следовательно, ее высокий удельный импульс во всем диапазоне изменения тяги. Данный способ может быть реализован без существенных конструктивных осложнений лишь в случае камеры, подобной камере двигателя посадочного модуля РКК «Apollo», удельный импульс которой из-за низкого качества распыла и низкой полноты сгорания топлива в камере во всем диапазоне изменения тяги находится на уровне Двигатель посадочной платформы РКК «Луна-16», имеющий камеру с большим количеством мелкомасштабных 2-компонентных форсунок с постоянными проходными сечениями, реализует единственно возможный для него способ дросселирования тяги, основанный на снижении расходов компонентов топлива в камеру (при котором пропорционально квадратам расходов уменьшаются перепады давлений на форсунках). Этот способ (используется в двигателе лунной посадочной платформы, представленном в сборнике «Двигатели 1944-2000, авиационные, ракетные, морские, промышленные», Москва, АКС КОНВЕРСАЛТ, 2000 г., под редакцией И.Г.Шустова, стр. 78.) принят за прототип изобретения. Данный способ обеспечивает высококачественный распыл и смешение компонентов топлива в камере при максимальных расходах и перепадах давлений на форсунках, соответствующих максимальной тяге двигателя, как следствие максимальную полноту сгорания компонентов топлива в камере, близкую к теоретическому пределу, и, соответственно, максимальный удельный импульс камеры и двигателя, на десятки секунд превышающий удельный импульс двигателя посадочного модуля РКК «Apollo». Однако при дросселировании тяги таким способом, вследствие уменьшения перепадов давлений на форсунках из-за уменьшения расходов, качество распыла поступающих в камеру компонентов топлива существенно ухудшается, что приводит к уменьшению удельного импульса, а при достижении некоторых предельных величин (для двигателя посадочной платформы РКК «Луна-16», реализующего способ-прототип минимально допустимый перепад давления ΔР≈1,5 атм) — к негативным процессам, таким как, например, низкочастотные колебания давления в камере, препятствующим дальнейшему снижению тяги. Таким образом, степень дросселирования тяги двигателя по прототипу ограничена (для двигателя посадочной платформы РКК «Луна-16» — не более 3) и дальнейшее ее увеличение возможно лишь за счет повышения перепадов давлений на форсунках камеры на режиме максимальной тяги, что приводит к существенному ухудшению экономичности двигателя с турбонасосной подачей компонентов топлива или массовых характеристик ДУ (с вытеснительной подачей). Так, исходя из указанного минимально допустимого перепада давления на форсунках ΔР≈1,5 атм, для обеспечения требуемого при мягкой посадке посадочной платформы РКК «Луна-16» (без использования специальных двигателей мягкой посадки) семикратного дросселирования тяги необходимо увеличить перепад давления на форсунках камеры при максимальной тяге двигателя с 15 атм до 69 атм, что приведет к уменьшению удельного импульса двигателя на режиме максимальной тяги на 4 с вследствие увеличения затрат компонентов топлива на привод ТНА при турбонасосной системе подачи топлива или к увеличению массы двигательной установки (за счет увеличения массы баков и баллонов с газом наддува баков) в 3 раза при вытеснительной системе подачи топлива. Кроме того, при этом увеличивается опасность возникновения высокочастотных колебаний давления в камере. Предлагаемое изобретение направлено на уменьшение потерь удельного импульса жидкостного ракетного двигателя с глубоким дросселированием тяги и увеличение допустимой степени дросселирования тяги двигателя при обеспечении его высоких энергомассовых характеристик. Результат обеспечивается тем, что способ дросселирования тяги жидкостного ракетного двигателя, основанный на снижении массовых расходов компонентов топлива в камеру с нерегулируемыми форсунками, при этом после уменьшения массовых расходов компонентов топлива в камеру двигателя ниже заданных значений подают газ в полости магистралей питания камеры на входах в форсуночную головку камеры и смешивают его с жидкими компонентами топлива, создавая гомогенные мелкодисперсные эмульсии компонентов топлива, относительные объемные газосодержания которых увеличивают с увеличением степени дросселирования тяги. Вследствие мелкодисперсности эмульсии с размерами микропузырьков ≤0,1 мм при малом времени пребывания ( 0,1÷0,2 с) в полостях форсуночной головки эмульсии компонентов топлива не расслаиваются на газ и жидкость и в виде гомогенных смесей газа и жидкости поступают через форсунки в камеру, где смешиваются и сгорают. При этом плотности эмульгированных компонентов топлива на входах в форсунки уменьшаются в соответствии с зависимостью где ρ — плотность эмульсии, ρж — плотность жидкости, ρг — плотность газа, ϕ — относительное объемное содержание газа в эмульсии. С уменьшением плотности эмульгированного компонента топлива при постоянстве массового расхода его объемный расход через форсунки увеличивается обратно пропорционально плотности, соответственно увеличивается скорость впрыска компонента в камеру, а перепад давления, определяющий качество распыла жидкого компонента, в соответствии с законом Бернулли возрастает. Вследствие вышеуказанного, по сравнению с прототипом улучшается распыл компонентов топлива, их смешение в камере, чему, кроме скорости впрыска, способствует структура поступающей из форсунок мелкодисперсной эмульсии, а с увеличением перепадов давления на форсунках уменьшается вероятность возникновения низкочастотных пульсаций давления в камере с присущими им негативными последствиями. На чертеже представлена схема ЖРД, реализующего предлагаемый способ дросселирования тяги. В состав двигателя входят камера 1 с форсуночной головкой 2 магистрали окислителя 3 и горючего 4, исполнительные органы системы регулирования тяги — дроссели 5, 6 с электроприводами 7, 8, пневмоуправляемые отсечные клапаны 9, 10, пневмомагистраль 11, эмульгаторы 12, 13 в магистралях 3, 4, трубопроводы 14, 15, сообщающие полости эмульгаторов 12, 13 с пневмомагистралью 11, обратные клапаны 16, 17 и дроссельные шайбы 18, 19 в трубопроводах 14, 15, электроклапан 20 в пневмомагистраль 11 на входе в трубопроводы 14, 15. Во время работы двигателя на режимах максимальной и относительно высокой тяги компоненты топлива через дроссели 5, 4 и открытые давлением газа управления в управляющих полостях отсечные клапаны 9, 10 поступают на форсунки форсуночной головки 2 камеры 1. На указанных режимах достаточные перепады давлений на форсунках обеспечивают качественный распыл компонентов топлива, следовательно, высокую полноту их сгорания в камере и ее высокий удельный импульс. При этом обратные клапаны 16, 17 препятствуют поступлению компонентов топлива из магистралей 3, 4 в трубопроводы 14, 15 и пневмомагистраль 11. При дросселировании тяги двигателя за счет уменьшения проходных сечений дросселей 5, 6 электроприводами 7, 8 расходы компонентов топлива в камеру уменьшаются, давления их на входах в форсуночную головку 2 камеры 1 и перепады давлений на форсунках падают. При достижении степени дросселирования, при которой перепад давлений на форсунках недостаточен для качественного распыла и смешения компонентов топлива, вследствие чего полнота их сгорания в камере и удельный импульс камеры уменьшаются (эта степень дросселирования определяется экспериментально), подается электрическое напряжение на электроклапан 20. Электроклапан 20 открывается, газ из пневмомагистралей управления 11 поступает в трубопроводы 14, 15 и через дроссельные шайбы 18, 19 и обратные клапаны 16, 17 в полости эмульгаторов 12, 13. Истекая через микроскопические перфорации в стенках эмульгаторов газ дробится под действием сил поверхностного натяжения жидких компонентов топлива на пузырьки с диаметром, в 2 раза превышающим размеры перфорации, и смешиваются с жидкими компонентами топлива, в результате чего в магистралях 3, 4 создаются гомогенные эмульсии окислителя и горючего, которые поступают в соответствующие полости форсуночной головки 2 и далее в форсунки окислителя и горючего камеры 1. При этом перепады давлений на форсунках увеличиваются приблизительно пропорционально объемным содержаниям газа в эмульсиях компонентов топлива. При дальнейшем дросселировании тяги двигателя посредством уменьшения расходов компонентов топлива в камеру 1 их давления на входах в форсуночную головку 2, в магистралях 3, 4, также в полостях эмульгаторов 12, 13 уменьшаются, перепады давлений на дроссельных шайбах 18, 19 увеличиваются, массовые расходы газа через дроссельные шайбы и эмульгаторы 12, 13 в магистрали 3, 4 вследствие увеличения перепадов давлений на них при постоянном давлении газа на входе в дроссельные шайбы 18, 19 возрастают до величин, соответствующих критическим перепадам давлений на дроссельных шайбах 18, 19, после чего остаются постоянными. В результате при дросселировании тяги двигателя уменьшением расходов компонентов топлива относительное объемное газосодержание в эмульсиях окислителя и горючего, поступающих в форсунки камеры 1, возрастает (из-за увеличения массового расхода газа, а также из-за падения давления компонентов топлива), что приводит к уменьшению их плотностей, увеличению перепадов давлений на форсунках, повышению качества распыла компонентов топлива, их смешиванию в камере с сопутствующим увеличением полноты сгорания и, соответственно, удельного импульса камеры при высоких степенях дросселирования тяги двигателя, а также исключает развитие негативных процессов, возникающих при недостаточных для качественного распыла компонентов топлива перепадах давления на форсунках, увеличивая тем самым возможную степень дросселирования тяги двигателя. Так, расчетная оценка показывает, что использование предлагаемого способа дросселирования позволит увеличить степень дросселирования тяги двигателя посадочной платформы РКК «Луна-16» с трех до семи при относительном объемном содержании газа в эмульсиях компонентов топлива ϕ=0,9 и перепадах давлений на форсунках ΔР=4,73 атм на режиме минимальной тяги (вместо перепада давления ≈0,48 ата, в случае прототипа, при котором распыл компонентов топлива форсунками отсутствует), что обеспечивает достаточно высокий удельный импульс камеры и двигателя. Способ дросселирования тяги жидкостного ракетного двигателя, основанный на снижении массовых расходов компонентов топлива в камеру с нерегулируемыми форсунками, отличающийся тем, что после уменьшения массовых расходов компонентов топлива в камеру двигателя ниже заданных значений подают газ в полости магистралей питания камеры на входах в форсуночную головку камеры и смешивают его с жидкими компонентами топлива, создавая гомогенные мелкодисперсные эмульсии компонентов топлива, относительные объемные газосодержания которых увеличивают с увеличением степени дросселирования тяги. и Δ T можно считать достаточно малыми, чтобы их отношение заменить частной производной.— интегральный эффект Джоуля-Томсона.
и Δ T можно считать достаточно малыми, чтобы их отношение заменить частной производной.— интегральный эффект Джоуля-Томсона.Эффект Джоуля-Томсона для газа Ван-дер-Ваальса [ править | править код ]
Свойства [ править | править код ]
Применение [ править | править код ]
ДРОССЕЛЬНЫЕ ХАРАКТЕРИСТИКИ ТРД
 (рис. 4.8 б). Основные режимы работы двигателя отмечены условными обозначениями. Характеристики построены в относительных координатах, где за исходный принят максимальный режим.
(рис. 4.8 б). Основные режимы работы двигателя отмечены условными обозначениями. Характеристики построены в относительных координатах, где за исходный принят максимальный режим. степени повышения давления и КПД компрессора, а также,
степени повышения давления и КПД компрессора, а также,  и
и  . Объясним с их помощью протекание дроссельных характеристик.и q(lв) из-за перемещения рабочей точки по рабочей линии на характеристике компрессора вниз. Снижение Руд обусловлено одновременным уменьшением параметров рабочего процесса p и D (в основном, температуры газа перед турбиной
. Объясним с их помощью протекание дроссельных характеристик.и q(lв) из-за перемещения рабочей точки по рабочей линии на характеристике компрессора вниз. Снижение Руд обусловлено одновременным уменьшением параметров рабочего процесса p и D (в основном, температуры газа перед турбиной  ), как это показано на рис. 4.9.при
), как это показано на рис. 4.9.при  снижается при уменьшении
снижается при уменьшении  чрезвычайно интенсивно в соответствии со снижением работы, потребной для вращения компрессора. Происходит значительное уменьшение скорости истечения сс и удельной тяги Руд =
чрезвычайно интенсивно в соответствии со снижением работы, потребной для вращения компрессора. Происходит значительное уменьшение скорости истечения сс и удельной тяги Руд =  , что наряду с уменьшением Gв приводит к очень интенсивному снижению тяги двигателя.с уменьшением
, что наряду с уменьшением Gв приводит к очень интенсивному снижению тяги двигателя.с уменьшением  . Это обусловлено снижением
. Это обусловлено снижением  при переходе реактивного сопла на докритические режимы истечения.
при переходе реактивного сопла на докритические режимы истечения. . Снижение удельного расхода топлива на начальном участке дроссельной характеристики (от максимального до крейсерского режимов, рис. 4.8) объясняется интенсивным увеличением тягового КПД, вызванным быстрым снижением скорости истечения при дросселировании (из-за падения и
. Снижение удельного расхода топлива на начальном участке дроссельной характеристики (от максимального до крейсерского режимов, рис. 4.8) объясняется интенсивным увеличением тягового КПД, вызванным быстрым снижением скорости истечения при дросселировании (из-за падения и  ) и уменьшением, вследствие этого, потерь с выходной скоростьюбольше
) и уменьшением, вследствие этого, потерь с выходной скоростьюбольше  , а поэтому снижение при дросселировании двигателя вблизи максимального режима приводит к приближению температуры к ее экономическому значению, что и вызывает некоторое уменьшение Суд (за счет повышения тягового КПД).и
, а поэтому снижение при дросселировании двигателя вблизи максимального режима приводит к приближению температуры к ее экономическому значению, что и вызывает некоторое уменьшение Суд (за счет повышения тягового КПД).и  увеличивались (как показано на рис. 4.10) и в настоящее время они достигают: m ≈ 4,5…5,5;
увеличивались (как показано на рис. 4.10) и в настоящее время они достигают: m ≈ 4,5…5,5;  ≈ 1500…1600 К;
≈ 1500…1600 К;  ≈ 25…35.
≈ 25…35.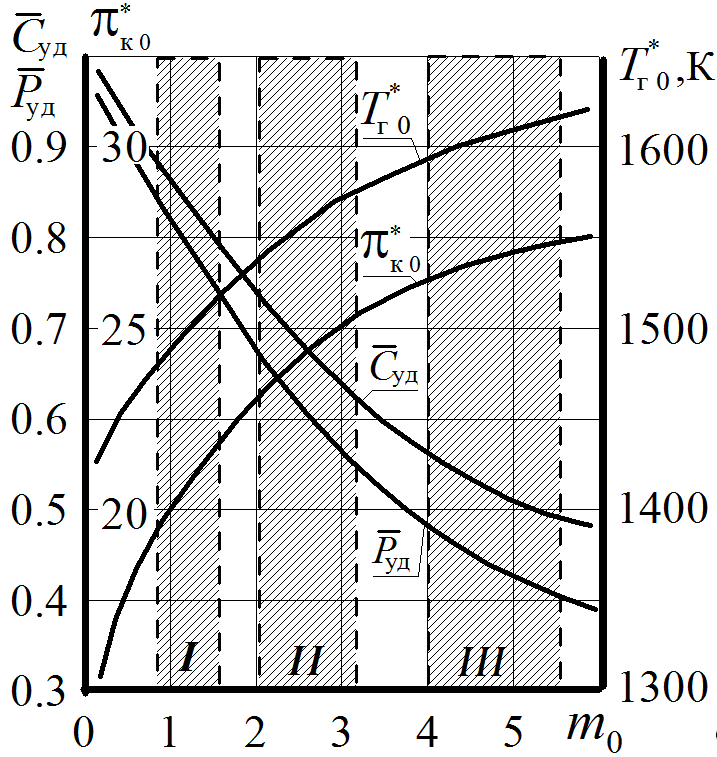
 за счет снижения потерь с выходной скоростью. Вследствие увеличения параметров рабочего процесса, при условии сохранения высоких КПД элементов, достигается увеличение внутреннего КПД двигателя. В итоге повышается полный КПД двигателя hп=hвнhтяг и снижается удельный расход топлива Суд
за счет снижения потерь с выходной скоростью. Вследствие увеличения параметров рабочего процесса, при условии сохранения высоких КПД элементов, достигается увеличение внутреннего КПД двигателя. В итоге повышается полный КПД двигателя hп=hвнhтяг и снижается удельный расход топлива Суд  .
.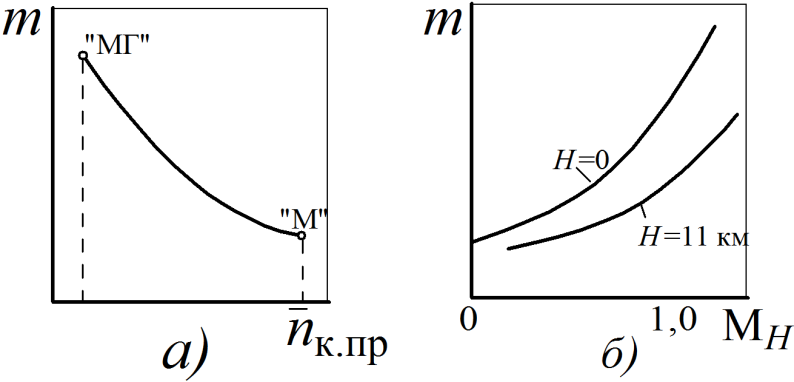
 представлен на рис. 4.11 а. С уменьшением
представлен на рис. 4.11 а. С уменьшением  величина m возрастает, а это, как видно из рис. 4.11 б, приводит к повышению m с увеличением скорости (числа MН) полета и к ее снижению с увеличением высоты полета Н до 11 км.
величина m возрастает, а это, как видно из рис. 4.11 б, приводит к повышению m с увеличением скорости (числа MН) полета и к ее снижению с увеличением высоты полета Н до 11 км.Известия РАН. Теория и системы управления, 2019, № 5, стр. 145-154
Алгоритм управления двигательной установкой космического аппарата с парированием накопления кинетического момента
Москва, Россия
После доработки 19.04.2019
Принята к публикации 20.05.2019Что такое степень дросселирования двигателя