
Датчик холостого хода
Датчик холостого хода. Шаговый мотор (регулятор ХХ)
Шаговый мотор установлен в байпасном канале узла дроссельной заслонки.
Положение вала шагового мотора определяет проходное сечение байпасного канала, необходимое для устойчивой работы двигателя при закрытой дроссельной заслонке
В системе управления шаговый мотор выполняет несколько основных функций:

• Прогрев двигателя после запуска. Система определяет тепловое состояние двигателя по датчику температуры охлаждающей жидкости и автоматически устанавливает обороты холостого хода (минимальные обороты при закрытой дроссельной заслонке).
С помощью шагового мотора в этом случае задается такое сечение байпасного канала, при котором двигатель способен поддерживать эти обороты.
• При открытии дроссельной заслонки весь воздух в двигатель поступает через сечение дроссельной заслонки, а байпасный канал должен быть подготовлен к резкому закрытию дросселя и сбросу нагрузки (отключение КПП).
Система отслеживает с помощью шагового мотора такое сечение байпасного канала (в зависимости от оборотов двигателя, скорости автомобиля и положения дроссельной заслонки) при котором в случае сброса нагрузки должно быть обеспечено плавное снижение оборотов коленчатого вала до заданных оборотов холостого хода.
• Третьей функцией шагового мотора является компенсация контролируемой блоком управления нагрузки (включение/выключение вентилятора, кондиционера и т.д.).
В режиме холостого хода система корректирует положение шагового мотора до включения/выключения нагрузки. Тем самым компенсируется мощность, подключаемой этой нагрузки (компенсирует провал оборотов в режиме холостого хода).
Шаговый мотор и называют регулятором холостого хода, но он выполняет лишь перечисленные функции.
Заданные обороты холостого хода в пределах 50 об/мин поддерживаются в основном быстрым контуром управления — регулятором по углу опережения зажигания.
Раскачка оборотов в режиме холостого хода зависит именно от этого контура и влияния возмущений в системе топливоподачи.
Шаговый мотор определяет медленную составляющую в регулировании, отслеживая режимные переходы системы управления.
Выход из строя шагового двигателя приводит к явным сбоям в системе: невозможность работы двигателя на холостом ходу, повышение оборотов ХХ, увеличивающихся по мере прогрева двигателя.
Эти неисправности возникают и при неполадках в цепях управления шаговым мотором и могут быть определены при помощи тестера ДСТ-2М, который позволяет задавать положение шагового мотора как параметр блока управления.
Выбрав режим управления исполнительными механизмами в тестере, нужно подвигать шаговый мотор с помощью блока управления в ту или иную сторону.
Если при этом обороты двигателя не изменяются, расход воздуха остается постоянным, а система определяет постоянное положение шагового мотора, неисправность шагового мотора или цепей его управления очевидна.
Проверка шагового мотора с помощью тестера может и не дать результата. Система будет правильно отрабатывать ваши попытки закрыть или открыть байпасный канал.
Но при этом при эксплуатации автомобиля останутся зависания оборотов при отключении КПП и заглохания двигателя при движении накатом и невозможность запуска двигателя без помощи дроссельной заслонки.
Появление в комплексе этих неисправностей говорит о неисправности шагового двигателя или его цепей управления. И даже при исправных цепях, шаговый мотор может просто неправильно выполнять команды системы управления.
Вместо движения вперед отрабатывает движение назад или наоборот. Это можно наблюдать, если снять шаговый мотор и специальным тестером задавать ему движения в разные стороны.
Алгоритм управления шагового мотора достаточно сложен, и сбои в его работе могут быть выявлены только специальным тестером, например, ДСТ-6С.
Блок управления может выдавать код неисправности шагового мотора, но не всегда это означает, что шаговый мотор или цепи его управления действительно вышли из строя. К сожалению, этот код может появиться и при исправном шаговом моторе.
Прежде чем разбираться с шаговым мотором, убедитесь, что заданные обороты холостого хода в системе выставляются правильно по температуре двигателя и режим холостого хода определен в системе (положение дроссельной заслонки 0%).
Совет: Если смазывать механическую часть шагового мотора литолом, то он работает значительно лучше и дольше. После смазки плохой шаговый мотор часто восстанавливает свою работоспособность.
Шаговый электродвигатель
Ша́говый электродви́гатель — синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Содержание
- 1 Описание
- 2 Использование
- 2.1 Датчик поворота
- 3 Преимущества и недостатки
- 4 См. также
- 5 Примечания
- 6 Литература
- 7 Ссылки
Описание [ править | править код ]


Первые шаговые двигатели появились в 1830-х годах и представляли собой электромагнит, приводящий в движение храповое колесо. За одно включение электромагнита храповое колесо перемещается на величину зубцового шага храпового колеса. Храповые шаговые двигатели и в настоящее время находят довольно широкое применение [1] .
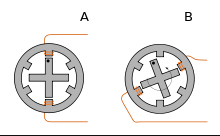
Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого или из магнито-твёрдого материала. Шаговые двигатели с магнитным ротором позволяют получать больший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.
Таким образом по конструкции ротора выделяют следующие разновидности шагового двигателя [2] :
- с постоянными магнитами (ротор из магнитотвёрдого материала);
- реактивный (ротор из магнитомягкого материала);
- гибридный.
Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3,6-градусных двигателей и 8 основных полюсов для 1,8—0,9-градусных двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определённых положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть — между ними.
Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделён на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повёрнуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи.
Использование [ править | править код ]
В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шаг/об). Точность выставления шага определяется качеством механической обработки ротора и статора электродвигателя. Производители современных шаговых электродвигателей гарантируют точность выставления шага без нагрузки до 5 % от величины шага.
Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага или при увеличении количества фаз.
Режим дробления шага (микрошаг) реализуется при независимом управлении током обмоток шагового электродвигателя. Управляя соотношением токов в обмотках, можно зафиксировать ротор в промежуточном положении между шагами. Таким образом можно повысить плавность вращения ротора и добиться высокой точности позиционирования. Качество изготовления современных шаговых двигателей позволяет повысить точность позиционирования в 10—20 раз.
Шаговые двигатели стандартизованы национальной ассоциацией производителей электрооборудования [en] (NEMA) по посадочным размерам и размеру фланца: NEMA 17, NEMA 23, NEMA 34 и др. — размер фланца 42, 57, 86 и 110 мм соответственно. Шаговые электродвигатели NEMA 23 могут создавать крутящий момент до 30 кгс⋅см, NEMA 34 — до 120 кгс⋅см и до 210 кгс⋅см для двигателей с фланцем 110 мм.

Шаговые двигатели создают сравнительно высокий момент при низких скоростях вращения. Момент существенно падает при увеличении скорости вращения. Однако, динамические характеристики двигателя могут быть существенно улучшены при использовании драйверов со стабилизацией тока на основе ШИМ.
Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов, например, в станках с ЧПУ. В отличие от сервоприводов, шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения.
Шаговые двигатели применяются в устройствах компьютерной памяти — НГМД, НЖМД, устройствах чтения оптических дисков.
Датчик поворота [ править | править код ]
Шаговые двигатели с постоянными магнитами могут использоваться в качестве датчиков угла поворота благодаря возникновению ЭДС на обмотках при вращении ротора. При этом, несмотря на удобство пользования и хорошую точность и повторяемость, необходимо учитывать, что:
- без вращения вала нет ЭДС; определить положение стоящего вала нельзя;
- возможна остановка вала в зоне неустойчивого равновесия (промежуточно между полюсами) ШД. Последующий пуск вала приведёт к тому, что, в зависимости от чувствительности компаратора, будет пропуск этого полюса, или два импульса вместо одного. В обоих случаях все дальнейшие отсчёты будут с ошибкой на один шаг. Для практически полного, но не 100%-го, устранения такого поведения необходимо применить муфту с соответствующим гистерезисом (угловым люфтом).
Преимущества и недостатки [ править | править код ]
Главное преимущество шаговых приводов — точность. При подаче потенциалов на обмотки шаговый двигатель повернётся строго на определённый угол. Стоимость шаговых приводов в среднем в 1,5—2 раза ниже сервоприводов. Шаговый привод, как недорогая альтернатива сервоприводу, наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика. Можно отметить также длительный срок службы, порой сравнимый со временем морального устаревания или выработки ресурса всего станка; точность работы ШД за это время падает незначительно. Нетребовательны к техобслуживанию.
Возможность «проскальзывания» ротора — наиболее известная проблема этих двигателей. Это может произойти при превышении нагрузки на валу, при неверной настройке управляющей программы (например, ускорение старта или торможения не адекватно перемещаемой массе), при приближении скорости вращения к резонансной. Наличие датчика позволяет обнаружить проблему, но автоматически скомпенсировать её без остановки производственной программы возможно только в очень редких случаях [ источник не указан 2962 дня ] . Чтобы избежать проскальзывания ротора, как один из способов, можно увеличить мощность двигателя.
Датчик оборотов шагового двигателя
Применение шаговых двигателей и сравнение двигателей.
В работе фрезеров используются два типа двигателя: шаговый – электромеханическое устройство, преобразующее сигналы в угловое перемещение ротора с фиксацией в заданном положении. И серводвигатели – имеющие обратную связь, и которыми можно управлять через цепь контроллера путём увеличения и уменьшения тока. Шаговые имеют меньшую мощность и скорость, и значительно дешевле серводвигателей.
Как правило, шаговый электродвигатель – это электромеханическое устройство, которое преобразует сигналы управления в угловое перемещение его ротора с качественной фиксацией в заданном положении. Сегодня современные шаговые двигатели (ШД), по сути, являются синхронными двигателями, не имеющими пусковую обмотку на роторе, что соответственно объясняется частотным пуском самого ШД. Последовательная активация обмоток двигателя порождает дискретные угловые перемещения (т. е. – шаги) ротора. Отличительная особенность этих двигателей – это возможность без датчика обратной связи осуществлять позиционирование по положению.
Шаговый двигатель относится к классу так называемых «бесколлекторных» двигателей постоянного тока. Такие двигатели как непосредственно и любые другие бесколлекторные электрические машины, имеют достаточно высокую надежность и весьма внушительный срок службы, что в свою очередь позволяет применять их в самых разных индустриальных сферах. Если сравнивать обычные электродвигатели постоянного тока с шаговыми двигателями, то последние требуют более сложных схем управления, выполняющие абсолютно все коммутации обмоток.

Сегодня существуют три основных типа/вида шаговых двигателей
- Гибридные двигатели – наиболее часто используемые во фрезерных станках с числовым программным управлением.
- Двигатели с постоянными магнитами.
- Двигатели, имеющие переменное магнитное сопротивление.
Серводвигатели
Серводвигатель – это непосредственно двигатель с обратной связью, которой можно управлять, чтобы или достичь требуемой скорости (следовательно, крутящего момента) или же получить необходимый угол поворота. Именно для этой цели устройство обратной связи посылает определенные сигналы в цепь контроллера серводвигателя, сообщая о скорости и соответственно угловом положении. Если в результате наиболее высоких нагрузок скорость окажется гораздо, ниже требуемой величины, то ток будет увеличиваться покуда скорость не достигнет потребной величины. Когда сигнал скорости показывает, что она больше, чем необходимо, то ток соответственно, уменьшается. Если же по положению применена обратная связь, то сигнал о нем используется, чтобы остановить двигатель в тот момент, когда непосредственно ротор приблизится к необходимому угловому положению.
Для этого могут использоваться разные типы/виды датчиков, включая кодирующие устройства, например, такие как: потенциометры, тахометры и резольверы. Если применяется датчик положения типа кодирующего устройства или потенциометра, его сигнал вполне может быть дифференцирован для того, чтобы выработать определенный сигнал о скорости.
На сегодняшний день сервоприводы используются в высокопроизводительном оборудовании, к примеру, в таких производственных отраслях как: изготовление различных стройматериалов, напитков, упаковки, в полиграфии и подъемно-транспортной технике. Также в последнее время наблюдается тенденция к умножению доли сервоприводов в пищевой промышленности и деревообработке.
Решающим фактором использования сервоприводов является не только высокая их динамика, но и возможность получить высокостабильное или точное управление, широкий диапазон регулирования скорости, малые габариты и вес, а также помехоустойчивость.
Для сервоприводов характерны показатели
- управление по моменту, по скорости или по позиции;
- статическая точность поддержания скорости непосредственно по валу двигателя не более чем 0,01%;
- диапазон регулирования скорости более чем в 1:1000;
- точность поддержания позиции по валу двигателя менее ± 10;
- компактные размеры и низкий вес;
- отсутствие и бесконтактность узлов, требующих обслуживания;
- достаточно высокое быстродействие;
- значительная перегрузочная способность по моменту (т. е. кратность предельного момента кратковременно может превысить 3);
- практически неограниченный диапазон (1:10 000 и более) для регулирования частоты вращения;
- показатели кпд вентильных двигателей, как правило, превышают 90%, при изменении мощности нагрузки двигателя, при колебаниях напряжения питающей электросети меняются очень несущественно, в отличие от асинхронных;
- электродвигателей, где максимальный кпд не превышает и 86%, а также, напрямую зависит от изменений нагрузки;
- достаточно низкий перегрев вентильного электродвигателя, потому как на роторе двигателя отсутствует обмотка, что существенно увеличивает его срок службы, работающего в режиме учащенных перегрузок;
- довольно-таки большая плотность момента на одну единицу массы электродвигателя.
Сравнение работы простого cерво и iагового двигателей
Для понимания различия между обычным шаговым и серво двигателем давайте рассмотрим работу системы именно с шаговым мотором, на котором непосредственно стоит энкодер (шаговый серводвигатель).
Контроллер выдал команду на какое-то количество шагов – повернуть вал. В обычном шаговом двигателе контроллер не в курсе, насколько конкретно шагов повернулся вал (т. к. у него отсутствует обратная связь). Просто он «считает», что вал повернулся правильно. А ведь бывает, что двигатель не смог повернуть вал или силы не хватило или по другой какой-либо причине. Хотя при этом контроллер четко отсчитал импульсы. Это и есть так называемый пропуск шагов в шаговом двигателе.
В серводвигателе же подобная проблема полностью отсутствует. Контроллер дал команду вал повернуть настолько-то импульсов и ожидает покуда с энкодера придет сигнал, который подтвердит, что вал повернулся на необходимое число импульсов. При этом если с энкодера поступил, хотя бы на 1 импульс меньше, контроллер все равно будет продолжать подавать команду, пока с энкодера не поступит последний импульс, который выровняет соотношение истинного и заданного количества импульсов. Либо же по истечении заданного периода времени, контроллер выдаст специальный сигнал «Ошибка перемещения».
В сервоприводе удержание осуществляется исключительно за счет тока, протекающего непосредственно через обмотку двигателя. При этом в момент удержания половины периода ток поступает в одном направлении, а вторую половину оставшегося времени в ином направлении. Именно за счет этого происходит удержание якоря. В это время по импульсам с энкодера подходит проверка, якорь на месте (на выходе нет ни одного импульса) или же сдвинулся (на выходе энкодера, как правило, появится импульс, вернее код).
Преимущества шагового двигателя
- Шаговые двигатели существенно дешевле, нежели серводвигатели.
- Простота конструкции, а значит и простота ремонта.
- Простота системы управления (подходят практически все программы написанные для CNC станков).
Преимущества серводвигатель
- Бесшумность и плавность работы в некоторых случаях делают сервоприводы единственным возможным вариантом для работы.
- Надежность и безотказность: возможность применения в ответственных устройствах.
- Высокая точность и скорость перемещений доступны также и на низких скоростях.- Способность двигателя может выбираться пользователем непосредственно от того какую конкретно задачу необходимо выполнить.
Выводы
Ограничением в использовании шаговых двигателей являются мощность и соответственно скорость, однако по практике, их применение целиком оправданно в недорогих станках имеющих систему ЧПУ, предназначенных для обработки дерева, ДСП, МДФ, пластиков, легких металлов и прочих материалов средней скорости, необходимости производителей станков с ЧПУ по точности и по скорости. Если по каким-либо причинам такие параметры не устраивают, то, как правило, используют сервоприводы. Но стоит заметить, что при этом резко и, причем значительно поднимается стоимость конструкции в целом.
Если смотреть с другой стороны, то достичь реальной экономии времени обработки и даже при скоростных сервоприводах, можно за счет экономии на переходах и соответственно оптимизации путей обработки. В остальное же время, скорость весьма ограничена – режимами резки. Между деталью и приводом есть еще и фреза о чем часто забывают.
Достоинства сервопривода таковы, что использовать их можно было бы постоянно, когда только возможно, конечно если бы не два существенных недостатка: цена самого комплекта (т. е. блок управления + сервомотор) и сложность настройки, которая временами делает применение сервопривода совершенно – необоснованным.
Японская КПП и штатный спидометр.

Всем, привет!
Сразу к делу, может кто знает, как подружить АКПП от движка 2UZ-FE и штатный спидометр 21-ой Волги? Тема с тросиком, походу отпадает, т.к. на коробке установлен электронный датчик скорости и сигнал идет по проводам.
Комментарии 14

Способ — он завсегда есть…
😎
— тема сия актуальна отнюдь не только для «японских кпп».
Дело в том, что при любых изменениях «родной ходовой» — как-то замена дифференциала на другой с иным передаточным числом главной пары, замена резины и дисков — родной спидометр начинает подвирать. Боллее или менее сильно… В ту или иную сторону…
.
Выход — вполне очевиден: надо сделать «электронный троссик-редуктор».
.
А делается это так: — вместо родного тросика на кпп ставится электронный датчик оборотов кардана (что-нибудь типа www.drive2.ru/l/974592/ — или ему подобный). Поскольку это будет полный «самопал» — то датчик можно брать любой — лишь бы был по-надежнее (бесконтактный, с металлическим подшипником скольжения вала и со стальным валом) и подходящий по резьбе и посадочному месту.
— да, на «японскую КПП» — никакого датчика не нужно — он там уже свой есть…
— а вал родного спидометра соединяется с выходным валом какого-нибудь подходящего шагового двигателя. Такие двигатели можно добыть из старых приводов дискет, CD, DVD, винчестеров и прочей подобной техники. Достоинство этих шаговиков «компьютерного происхождения» в том, что они питаются обычно от те-же-самых 12 вольт…
— Внешнее отличие классического шагового двигателя от «обычного» двигателя постоянного тока — это количество проводов питания. Классический шаговый двигатели запитывается 4-мя проводами (один общий и 3 провода фаз).
— потом сигнал с датчика оборотов заводится на микроконтроллер, на котором «крутится» программа, преобразующая импульсы с датчика скорости вращения, установленном на КПП — в сигнал управления шаговым двигателем, подключенным к спидометру. Этот-же микроконтроллер занимается и ДЕЛЕНИЕМ (или умножением) частоты импульсов от датчика вращения кардана В НУЖНОЕ НАМ КОЛИЧЕСТВО РАЗ.
.
В результате всего этого «ухищерения» — мы получаем электронный эквивалент тросика спидометра, но обладающего возможностями РЕДУКТОРА. Т.е. один его конец может вращаться в заданное количество раз быстрее/медленнее другого конца этого «тросика».
.
Не, я конечно понимаю, что этот «электронный тросик» по-любому будет «подтормаживать» и подвирать. Погрешности цифровых вычислений при ограничениях на разрядность представления чисел — никто не отменял. И стрелка спидометра, скорее всего будет перемещаться не очень плавно (т.е. несколько дискретно)… Но, я так думаю, что с этой погрешностью можно вполне смириться… И потом — все это лечится совершенствованием управляющей программы — если какие-либо аспекты ее работы автора — не устраивают…
😎
.
Это есс-но только идея. Ну а до конкретной реализации руки пока не дошли… лень-с, текучка и «планов громадье».
8-))
.
Ну а «В ПРИНЦИПЕ» — ВСЕ МОЖНО СДЕЛАТЬ…
8-)))
.
Вообще-то шаговый двигатель, вращающий вал спидометра — можно вполне заменить и обычным двигателем постоянного тока, скорость вращения которого изменяется изменением силы питающего тока. НО-вот только… в таком случае на вал этого двигателя — надо насаживать еще один датчик оборотов (например крыльчатку с оптическим-датчиком от старой мыши). Да и управляющая программа контроллера будет в этом случае зюмо-зюмо сложнее… И хотя перемещение стрелки спидометра при таком решении теоретически может быть сделано сколь угодно плавным — но это еще надо суметь сделать…

Прочитал. Спасибо за идею. Сам такого точно не соберу, попробую поискать людей знающих у себя в городе )))

Сложно но если сильно захочется то можно
Уже имплантировал в родной спидометр начинку от GPS-спидометра. Работает! )))

