ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока широко востребованы в бытовой аппаратуре, для питания которой используется постоянное напряжение.
Существуют сложности с их запуском, которые возникают из-за того, что работа электрических машин основана на взаимодействии подвижного ротора с вращающимся электромагнитным (э/м) полем статора.
В случае постоянного напряжения питания формирование вращающегося магнитного поля невозможно без применения вспомогательных узлов и устройств, выбор которых определяет существующее разнообразие модификаций двигателей такого типа.
Разновидности двигателей постоянного тока.
Электрические машины этого типа различаются по способу получения вращающегося магнитного поля, зависящего от конструкции вспомогательного узла. В соответствие с этим все двигатели делятся на
- коллекторные;
- бесколлекторные;
- устройства с внешним возбуждением.
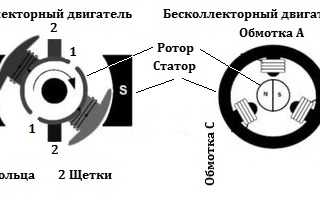
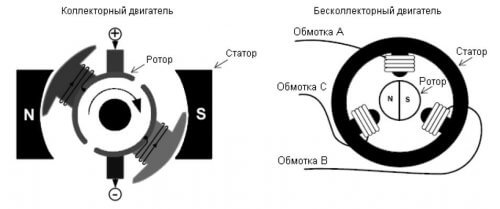
В первом случае для подачи питания на ламели ротора используются специальные графитовые щетки. Менять полярность подаваемого напряжения, создавая аналог вращающегося магнитного поля, удается за счет разорванной конструкции токоподающего узла (слева на рисунке).

В бесколлекторном двигателе вращающееся э/м поле формируется специальным коммутирующим узлом. Функцию последнего выполняют электронные схемы на полупроводниковых элементах, имеющие различное исполнение. Благодаря этому удается получить бесконтактное взаимодействие полей, без щеток и коллектора.
Типичный представитель такого электродвигателя – мотор-колесо, известное большинству любителей езды на малогабаритных транспортных средствах. Еще один распространенный способ запуска двигателя – включение в схему специальных обмоток возбуждения.
СПОСОБЫ ВОЗБУЖДЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Под возбуждением электродвигателей постоянного тока (ПТ) понимается эффект создания в них ЭДС, обеспечивающей вращение ротора. Их рабочие характеристики зависят от того, каким образом включена обмотка возбуждения (ОВ) по отношению к цепи якоря.
Наиболее распространены следующие схемы подключения:
- с независимым возбуждением (две обмотки не связаны одна с другой, а ОВ питается от отдельного источника);
- с параллельным возбуждением или шунтируемого типа (в них ОВ включена параллельно якорной цепочке);
- с последовательным возбуждением (ОВ включается последовательно с якорной обмоткой).
В ряде случаев, связанных с особенностями эксплуатации двигателей постоянного тока, применяется комбинированная схема включения.
Иногда ее называют «смешанной» или «компаундной» (в ней последовательное подключение совмещается с параллельным). Рассмотрим каждый из перечисленных вариантов более подробно.
Независимое возбуждение.
При этой схеме подключения обмотка возбуждения электрически не связана с катушкой якоря (рис.1). Для снижения тепловых потерь и создания необходимой величины ЭДС число витков в ней делается достаточно большим, что позволяет снизить ток возбуждения.

Регулировать ток в якоре можно посредством резистора Rдоб, включенного последовательно. Частоту вращения можно менять резистором Rрег. Возможность независимого управления параметрами двигателя относят к плюсам этой схемы.
Ее минус – необходимость использования дополнительного источника питания, что приводит к увеличению материальных издержек. Применение схемы с независимым возбуждением определяется особенностями конструкции управляемого электропривода.
Параллельное возбуждение.
Электрическая схема подключения с параллельным возбуждением в целом напоминает рассмотренную выше. Ее особенность – наличие электрической связи ОВ с якорной цепью (рис.2).

Эффективность работы двух рассмотренных схем практически одинакова. Преимущество этого способа включения в том, что в данной ситуации отпадает необходимость в дополнительном источнике питания. Ее минус – невозможность раздельной регулировки параметров электродвигателя.
Принцип работы электродвигателя с последовательным возбуждением.
Особенностью этой схемы является последовательное включение ОВ и якорной цепочки (рис.3). При таком варианте подключения ток якоря является одновременно и током возбуждения (Iя =Iв). Это вынуждает производителей оборудования наматывать ОВ проводом того же сечения, что и у якоря.

Недостаток этой схемы – в том, что скорость двигателя зависит от нагрузки на валу. При ее увеличении падение напряжения на обмотках и магнитный поток возрастают. А это приводит к сильному падению скорости вращения. При снижении нагрузки частота вращения двигателя резко возрастает и может достичь опасных значений (он может начать работать «вразнос»).
Данный вариант применяют в случаях, когда необходимо выдерживать большое пусковое усилие (момент). Или же когда двигателю предстоит работать в режиме кратковременных перегрузок. Схемы с последовательным запуском используются в тяговых двигателях (в метро, трамваях, электровозах и троллейбусах).
Принцип действия двигателя со смешанным возбуждением.
К каждому из полюсов системы со смешанным возбуждением подключено две обмотки: последовательная и параллельная (рис.4). Их допускается включать таким образом, чтобы магнитные потоки суммировались (согласное подключение), либо вычитались один из другого (встречное включение).

В зависимости от того, как соотносятся части каждого из магнитных потоков, двигатель постоянного тока со смешанным возбуждением приближаются по своим свойствам к одному из уже рассмотренных ранее вариантов.
Такие схемы применяются в ситуациях, когда необходим большой по величине пусковой момент и одновременно невозможно обойтись без регулировки частоты вращения вала при переменных нагрузках.
БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Бесколлекторным называют двигатель, ток в статорных обмотках которого коммутируется особыми электронными устройствами («драйверами» или «инверторами»). Такой коммутатор состоит из набора полупроводниковых элементов, создающих вращающее поле путем подачи тока в соответствующую обмотку.
Скорость вращения вала у агрегатов этого типа значительно выше, чем у коллекторных с постоянными магнитами. Это позволяет увеличить удельную мощность двигателя и повысить его КПД.
Устройство и принцип действия.
Любой бесколлекторный двигатель состоит из следующих основных узлов:
- статор с обмотками;
- вращающийся ротор с постоянными магнитами;
- контроллер, обеспечивающий формирование в статоре вращающегося э/м поля.
На статоре бесколлекторного двигателя располагаются 3 обмотки, которые, как и у электродвигателей переменного тока называются фазными.
Допустимость такого названия объясняется следующим. Несмотря на того, что эти агрегаты работают от источника постоянного напряжения (аккумуляторов) – управляющий коммутацией обмоток контроллер включает ток поочередно.
Это приводит к формированию в них переменной составляющей в виде прямоугольных импульсов. Они и создают видимость трехфазного вращающегося э/м поля, характерного для коллекторных электродвигателей синхронного или асинхронного типа.
Особенности конструкции.
В зависимости от того, по какой схеме включаются обмотки статора («звезда» или «треугольник») система содержит соответственно четыре или три рабочих шины. Катушки наматываются в пазах между зубьями сердечника статора, распределяясь равномерно по фазам.
В статор нередко интегрируются датчики Холла, фиксирующие текущее положение ротора.
С их помощью удается передавать информацию контроллеру, который в каждый момент «знает», в какой точке находится ротор и подает питающий импульс на нужную обмотку. Такая возможность повышает эффективность функционирования двигателя с максимально возможной отдачей (мощностью).
© 2014-2021 г.г. Все права защищены.
Материалы сайта имеют ознакомительный характер и не могут использоваться в качестве руководящих и нормативных документов.
Бесколлекторный двигатель постоянного тока
В чем отличия бесколлекторных двигателей от синхронных двигателей с постоянными магнитами?
Конструктивно двигатели этих типов очень схожи друг с другом. Основные отличия в способах управления двигателями. Так, синхронные двигатели – это довольно большой класс двигателей, включающий в себя широкий спектр различных видов двигателей, в том числе и такие, которые работают напрямую от стандартной промышленной сети переменного тока, или, как например, синхронные сервоприводы, работают при подаче напряжения различной частоты, что требует применения специализированных блоков, преобразующих частоту.
Бесколлекторные двигатели работают только при подаче на свои обмотки синхронизированных напряжений специальной формы, что требует применения электронных модулей генерации и коммутации таких сигналов.
Еще одним различием является форма питающего напряжения. В отличии от синхронных двигателей, запитываемых синусоидальным напряжением, бесколлекторные двигатели способны работать от переменного напряжения сложной ступенчатой формы.
Особенности конструкции
В настоящее время доступны различные конструкции бесколлекторных двигателей, в зависимости от технологии изготовления обмоток существуют традиционные обмотки на сердечниках и полые обмотки цилиндрической формы.
Обмотки на сердечниках имеют большие, относительно полых цилиндрических обмоток, индуктивность, постоянную времени, момент инерции и момент магнитной фиксации, а также более низкий КПД.
Лишенные крупных металлических сердечников двигатели с полыми обмотками имеют лучшие динамические характеристики изменения тока, что позволяет более гибко управлять моментом. При этом следует учитывать, что такие двигатели требуют дополнительных мер по фильтрации пульсаций тока (применение крупногабаритных дросселей) в случае, если управление ими реализовано от контроллеров с широтно-импульсной модуляцией на низкой частоте.
Двигатель постоянного тока — это электрический двигатель, питание которого обеспечивает постоянный ток. Бесколлекторный вид ДПТ — это замкнутая система, состоящая из ротора с постоянными магнитами, выполненного медным проводом, и статора с трехфазной обмоткой, выполненного из нескольких сложенных вместе листов магнитопроводящей стали. Двигатель представляет собой синхронное устройство, принцип работы которого основан на вращении магнитного поля. Для создания такого поля на обмотку статора подается трехфазная система напряжения, которая может быть сформирована в различных формах и различными способами. Контроллер двигателя формирует питающие напряжения (коммутация обмоток).
Точное управление бесколлекторным двигателем предполагает правильную последовательность и частоту переключения отдельных секций обмоток. Обмотки поочередно подключаются к источнику постоянного напряжения и, после того, как ротор поворачивается по направлению вектора магнитного поля обмотки статора, происходит подключение напряжения к другой паре обмоток. После, вектор магнитного поля статора занимает другое положение, а вращение ротора продолжается. Для необходимой возможности непрерывного определения текущего положения ротора используется специальный датчик, наиболее распространенным вариантом является датчик Холла, а также используют энкодеры и резольверы. При правильном расположении датчиков на статоре, они реагируют на магнитное поле. На датчики должны воздействовать магниты ротора, а угол между датчиками должен быть равен 120° эл.
Виды бесколлекторных двигателей
На данный момент существует огромное множество вариантов бесколлекторных двигателей в виду возможности сборки разнообразных конструкций.
По исполнению статорной обмотки выделяют два типа конструкции:
- Зубцовая (Slotted)
- Сплошная (Slotless)
Изначально, бесколлекторные двигатели имели только зубцовую обмотку. Статор в таком двигателе изготовлен из сложенных вместе стальных пластин с прорезями, куда установлены медные обмотки. Такая конструкция характеризуется определенным моментом «фиксации» при старте, что делает движение резким, особенно на малых скоростях. Момент появляется из-за усилия постоянных магнитов в роторе совпасть с пазами статора. Достоинством такой обмотки является низкая стоимость двигателей в виду простоты технологии, что делает их основным выбором для применений, где плавная работа не является решающим фактором. В сплошной обмотке зубья отсутствуют, слои статора изготовлены из стальных колец, а обмотка сжата в эпоксидной смоле. Таким образом, мы получаем жесткую обмотку в зазоре между статором и ротором. Сплошная обмотка обеспечивает двигателю точное позиционирование и плавность движения. Кроме того, низкая индуктивность делает двигатели идеальными для применения с необходимостью высокого ускорения и быстрым динамическим откликом.
По взаимному расположению ротора и статора различают внутрироторные и внешнероторные двигатели. У конструкции с внешним ротором магниты расположены снаружи неподвижного статора с обмотками, вокруг которого они вращаются. Такое исполнение используется при необходимости получения двигателя с относительно большим моментом и невысокими оборотами. Вариант внутреннего исполнения обеспечивает большим КПД и высокими оборотами, но меньшим моментом инерции при аналогичном наружном диаметре двигателя. По конструкции магниты ротора находятся внутри статора с обмотками.
Отличия бесколлекторного ДПТ от других типов двигателей:
1. От коллекторных ДПТ
В бесколлекторном двигателе роль механического коммутатора выполняет электронный преобразователь, что исключает необходимость использования коллектора и щеток. Отказ от движущегося электрического контакта позволяет увеличить надежность и скорость работы двигателя. Данное нововведение также улучшает удельную мощность бесколлекторного двигателя, однако высокие скорости крайне редко находят применение.
2. От синхронных двигателей с постоянными магнитами
По своей структуре бесколлекторные двигатели схожи с синхронными. Тем не менее, в двигателях синхронного типа предполагается напряжение синусоидальной формы, бесколлектроные же не допускают питание переменным напряжением ступенчатой формы (блочная коммутация) и даже используют в номинальных режимах работы.
Когда нужен бесколлекторный двигатель?
В случаях, когда его характеристики имеют преимущество перед остальными. Сферы применения, требующие большие скорости вращения (свыше 1000 об/мин) или высокий срок службы двигателя не обходятся без бесколлекторного двигателя. Применение низкоскоростных двигателей с большим числом полюсов целесообразно при необходимости использования сборки из двигателя с редуктором. Скорость высокоскоростных бесколлекторных двигателей будет превышать предельную редуктора, не позволяя использовать мощность в полном объеме. Для максимально простого управления естественным выбором будет коллекторный ДПТ.
С другой стороны, датчик Холла у бесколлекторных ДПТ в виду своих ограничений не может работать при условиях повышенной радиации и высокой температуры. Радиационная стойкость и диапазон рабочих температур ограничен у стандартных моделей таких датчиков. При необходимости использования бесколлекторных двигателей в экстремальных условиях, датчик Холла заменяют более стойким аналогом, что увеличивает стоимость двигателя и сроки поставки.
Большая Энциклопедия Нефти и Газа
Бесколлекторный двигатель
Синхронные двигатели, регулируемые путем изменения частоты с самосинхронизацией, называют вентильными двигателями; иногда их называют бесколлекторными двигателями постоянного тока . Однако первое название является более правильным, так как такие двигатели могут получать питание от сети как постоянного, так и переменного тока. [31]
Синхронные двигатели, регулируемые путем изменения частоты с самосинхронизацией, называют вентильными двигателями; иногда их называют бесколлекторными двигателями постоянного тока . [33]
Принципиальная функциональная схема бесколлекторного двигателя постоянного тока с коммутатором приведена на рис. 2.10. Эта схема показывает, что бесколлекторный двигатель постоянного тока состоит из электрической части двигателя и коммутатора. [34]
Еще два звена ПР — третье и четвертое ( рис. 4.11, б) — приводятся в движение бесколлекторными двигателями постоянного тока / с возбуждением от постоянных магнитов. [35]
Относительно высокая стоимость этих машин и сложность схемы соединений не дает им возможности конкурировать в целом ряде областей с трехфазным индукционным бесколлекторным двигателем . [36]
Рассмотренная выше структура системы управления обеспечивает автоматическое формирование в фазах двигателя синусоидальных токов и напряжений при работе исполнительного двигателя ИД в режиме бесколлекторного двигателя постоянного тока с оптимальным углом коммутации и минимизацией пульсаций электромагнитного момента. [37]
Оптимизированная архитектура блока менеджеров событий предназначена для прямого цифрового управления приводами всех типов на базе асинхронных, синхронных, шаговых, вентильно-индукторных двигателей, коллекторных и бесколлекторных двигателей постоянного тока , а также для построения двух — и многодвигательных систем привода, двух — и многоинверторных систем, четы-рехквадрантных полностью управляемых силовых преобразователей, преобразователей с активными входными цифровыми фильтрами, преобразователей частоты с непосредственной связью, матричных преобразователей. Сдвоенный менеджер событий предоставляет в распоряжение пользователя уникальные возможности по управлению инверторами сразу двух преобразователей частоты. [39]
Структура условного обозначения ПЧ: ЭТУ 7801 — 39, где Э — электропривод; Т — тиристор-ный; У — унифицированный; 7 — с бесколлекторным двигателем ; 8 — с двигателем низкого напряжения со статическим преобразователем; 39 — номинальный ток на выходе ПЧ равен 80 А. [41]
Другим применением циклоинверторов являются устройства, где необходимо изменение как частоты, так и1 величины выходного напряжем и, что необходимо, например, в регулируемом электроприводе переменного тока; Этот вид электропривода основан — на применении бесколлекторных двигателей и может быть использован, в частности, ка передвижных объектах и в тяжелых условиях работы. [43]
Груз может быть заменен пружиной. Применяемый в данном случае магнитоэлектрический бесколлекторный двигатель работает в режиме непрерывного вращения и включается по схеме с общим эмиттером. Ротором 7 двигателя служит постоянный высококоэрцитивный магнит, намагниченный в радиальном направлении. Катушка освобождения Wi включена в базовую, а катушка импульса W, — в коллекторную цепь. [44]
Что такое бесколлекторный двигатель постоянного тока, как он устроен и работает
Определение
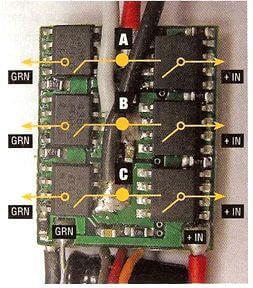
Бесколлекторным называют электродвигатель постоянного тока, ток в обмотках которого переключает специальное устройство-коммутатор — он носит название «драйвер» или «инвертор» и эти обмотки всегда расположены на статоре. Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора.
В отечественной литературе такие двигатели называют «вентильными» (потому что полупроводниковые ключи называют «вентилями»), и есть разделение таких электромашин на два вида по форме противо—ЭДС. В зарубежной литературе такое различие сохраняется, один из них называют аналогично русскому «BLDC» (brushless direct current drive или motor), что в дословном переводе звучит как «бесщёточный двигатель постоянного тока» в их обмотках возникает трапецеидальная ЭДС. Вентильные же электродвигатели с синусоидальной ЭДС называют PMSM (Permanent magnet synchronous machine), что переводится как «синхронный электродвигатель с возбуждением постоянными магнитами».
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.

Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.

В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер “знал”, в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.

В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.

Виды БДПТ
Теперь давайте разберемся, какими бывают бесколлекторные двигатели на постоянных магнитах. Их классифицируют по форме противо-ЭДС, конструкции, а также по наличию датчиков положения ротора. Итак, два основных типа отличающихся формой противо-ЭДС, которая наводится в обмотках при вращении ротора:
- BLDC — в них трапецеидальная противо-ЭДС;
- PMSM — противо-ЭДС синусоидальная.
В идеальном случае для них нужны разные источники питания (контроллеры), но на практике они взаимозаменяемы. Но если использовать контроллер с прямоугольными или трапецеидальным выходным напряжением с PMSM-двигателем, то будут слышны характерные звуки, похожие на стук во время вращения.
А по конструкции бесколлекторные двигатели постоянного тока бывают:
- С внутренним ротором. Это более привычное представление электродвигателя, когда статор — это корпус, а вращается вал, расположенный в нём. Часто их называют английским словом «Inrunner». Такой вариант обычно применяют для высокооборотистых электродвигателей
- С внешним ротором. Здесь вращается внешняя часть двигателя с закреплённым на ней валом, в англоязычных источниках его называют «outrunner». Эту схему устройства используют, когда нужен высокий момент.
Выбирают конструкцию в зависимости от того для чего нужен бесколлекторный двигатель в конкретном применении.

Современная промышленность выпускает бесколлекторные двигатели как с датчиками положения ротора, так и без них. Дело в том, что существует множество способов управления БДПТ, для некоторых из них нужны датчики положения, другие определяют положения по ЭДС в обмотках, третьи и вовсе просто подают питание на нужные фазы и электродвигатель самостоятельно синхронизируется с таким питанием и входит в рабочий режим.
Основные характеристики бесколлекторных двигателей постоянного тока:
- Режим работы — длительный или кратковременный.
- Максимальное рабочее напряжение.
- Максимальный рабочий ток.
- Максимальная мощность.
- Максимальные обороты, часто указывают не обороты, а KV — об/в, то есть количество оборотов на 1 вольт приложенного напряжения (без нагрузки на валу). Чтобы получить максимальные обороты — умножьте это число на максимальное напряжение.
- Сопротивление обмотки (чем оно меньше, тем выше КПД), обычно составляет сотые и тысячные доли Ома.
- Угол опережения фазы (timing) — время, через которое ток в обмотке достигнет своего максимума, это связано с её индуктивностью и законами коммутации (ток в индуктивности не может измениться мгновенно.
Схема подключения
Как было сказано выше, для работы бесколлекторного двигателя нужен специальный контроллер. На алиэкспресс можно найти как комплекты из двигателя и контроллера, так и по отдельности. Контроллер также называют ESC Motor или Electric Speed Controller. Выбирают их по силе тока, отдаваемого в нагрузку.
Обычно подключение электродвигателя к контроллеру не вызывает затруднений и понятно даже для чайников. Главное, что нужно знать — для смены направления вращения нужно изменить подключение любых двух фаз, собственно также, как и в трёхфазных асинхронных или синхронных электродвигателях.

В сети есть и ряд технических решений и схем как сложных, так и для чайников, которые вы можете увидеть ниже.
В этом видеоролике автор рассказывает, как подружить БК моторчик с «ардуиной».
А в этом ролике вы узнаете о различных способах подключения к разным регуляторам и как его можно сделать своими руками. Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
Кстати схему из видео для повторения также прикладываем:

Где применяются бесколлекторные двигатели
Сфера применения таких электродвигателей досрочно широка. Они используются как для привода мелких механизмов: в дисководах CD, DVD-приводах, жёстких дисках, так и в мощных устройствах: аккумуляторе и сетевом электроинструменте (с питанием порядка 12В), радиоуправляемых моделях (например, квадрокоптерах), станках ЧПУ для привода рабочего органа (обычно моторчики с номинальным напряжением 24В или 48В).
Широкое применение БДПТ нашли в электротранспорте, почти все современные мотор-колеса электросамокатов, велосипедов, мотоциклов и автомобилей — это бесколлекторные двигатели. К слову, номинальное напряжение электродвигателей для транспорта лежит в широком пределе, например, мотор-колесо для велосипеда зачастую работает от 36В или от 48В, за редким исключением и больше, а в автомобилях, например, на Toyota Prius порядка 120В, а на Nissan Leaf – доходит до 400, при том что заряжается от сети 220В (это реализуется с помощью встроенного преобразователя).
На самом деле область применения бесколлекторных электродвигателей очень обширна, отсутствие коллекторного узла позволяет его применять опасных местах, а также в местах с повышенной влажностью, без опасений замыканий, искрения или возгорания из-за дефектов в щеточном узле. Благодаря высокому КПД и хорошим массогабаритным показателям они нашли применение и в космической промышленности.
Преимущества и недостатки
Бесколлекторным двигателям постоянного тока, как и другим видам электромашин, присущи определенные достоинства и недостатки.
Преимущества у БДПТ заключаются в следующем:
- Благодаря возбуждению мощными постоянными магнитами (неодимовыми, например) превосходят по моменту и мощности и имеют меньшие габариты, чем асинхронные двигатели. Чем пользуется большинство производителей электротранспорта — от самокатов до автомобилей.
- Нет искрящего щеточно-коллекторного узла, который требует регулярного обслуживания.
- При использовании качественного контроллера в отличие от того же КД не выдают помехи в питающую сеть, что особенно важно в радиоуправляемых устройствах и транспорте с развитым электронным оборудованием в бортовой сети.
- КПД более 80, чаще и 90%.
- Высокая скорость вращения, в отдельных случаях до 100000 об/мин.
Но есть и существенный минус: бесколлекторный двигатель без контроллера — просто кусок железа с медной обмоткой. Он никак не сможет работать. Контроллеры стоят недешево и чаще всего их приходится заказывать в интернет-магазинах или с алиэкспресс. Из-за этого использовать БК-моторы в моделях и устройствах домашнего производства не всегда возможно.
Теперь вы знаете, что такое бесколлекторный двигатель постоянного тока, как он работает и где применяется. Надеемся, наша статья помогла вам разобраться во всех вопросах!