Электрическая схема управления крановым двигателем
Электрическая схема управления крановым двигателем
Для управления двигателями с фазным ротором наибольшее распространение получили контроллеры типов НТ-51, НТ-61, НТ-101, НТ-151, ККТ-61, ККТ-101 и ККТ-161. На рис. 31 приведена схема контроллера типа ККТ-101, которая аналогична схемам перечисленных выше контроллеров. Эти контроллеры различаются главным образом числом ступеней и расположением контактов. Вывод пускорегулирующих сопротивлений осуществляется поворотом вала контроллера с положения1до положения 6.Сначала под током находится все пусковое сопротивление, а затем часть роторного сопротивления шунтируется и в последнем положении вала контроллера; точкиР1, Р2, РЗзамкнуты, что соответствует полностью выведенному сопротивлению.
Максимальное релеМРв данной схеме отключает двигатель при перегрузках. Как предыдущие, эта схема обеспечивает нулевую защиту, нулевую блокировку иконечное ограничение хода механизма. Линейный контакторЛ,кнопкаКР,предохранители и максимальное реле входят в комплект защитной панели.
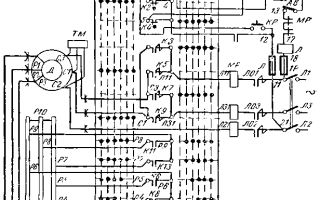
В приводе моста крана в ряде случаев применяется раздельный привод, т. е. два двигателя, которыми надо управлять синхронно. Для этой цепи служат контроллеры типов НТ-52, НТ-102, ККТ-62, ККТ-102 и др. Нарис. 32 показана схема контроллера типа ККТ-102, в которойроторные цепи разделены (объединять роторы двух машин нельзя во избежание механических и электрических перегрузок).
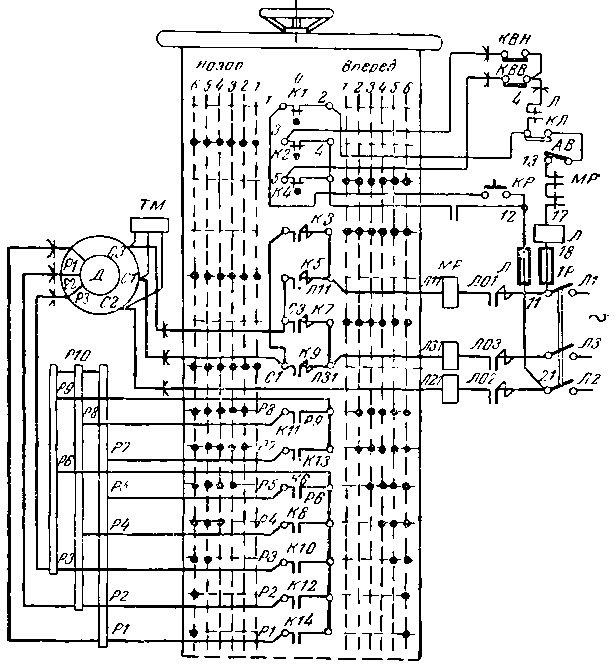
Рис. 31. Схема управления двигателем с фазным ротором при помощи контроллеров типа ККТ-101 и ККТ-161.
Чтобы не увеличились размеры контроллера при применении схемы, реверсированиедвигателя выполняется не контроллером, а двумя механически сблокированными контакторамиВи Я. Вместо кнопок служат пальцы контроллера30и50.Тормозной магнит или электродвигатель включают параллельно обмотке статора. Зажимы1 и 2предназначены для нулевой блокировки и присоединяются к соответствующим выводам защитной панели, к которым подводятся также и проводаЛ11, Л21, Л31.
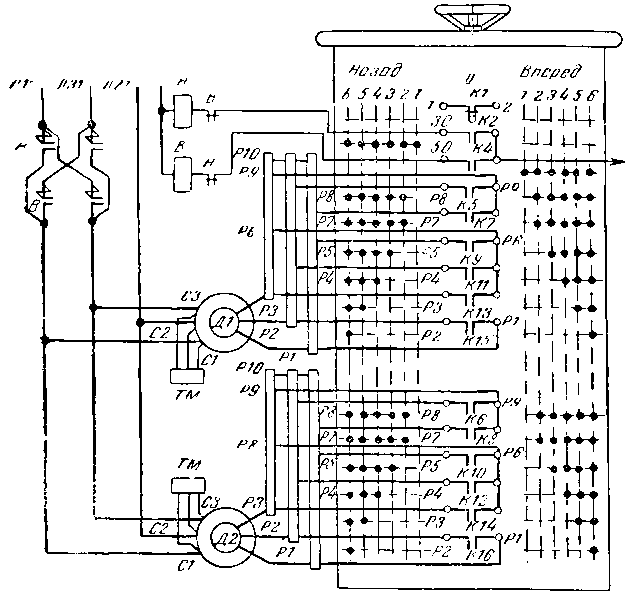
Рис. 32. Схема управления контроллером типа ККТ-102 или ККТ-102т двумя двигателями.
Если режим работы для силовых контроллеров слишком тяжел, применяют магнитные контроллеры. Обычно панели типаТприменяют для управления механизмами передвижения тележек и мостов, панели типаТС— в подъемных лебедках и грейферных механизмах. На рис. 33 приведена схема панели типа ТС.
При включении рубильника2Ри нулевом положении командоконтроллера получает питание катушка блокировочного релеРБ.Наличие размыкающего (в нулевом положении командоконтроллера) контактаК1позволяет производить пуск двигателя только начиная с нулевого положения командоконтроллера. В первом положении«Вперед»замыкается контактК6командоконтроллера и получает питание катушка контактораВ.Включаются контакторыВиМ.
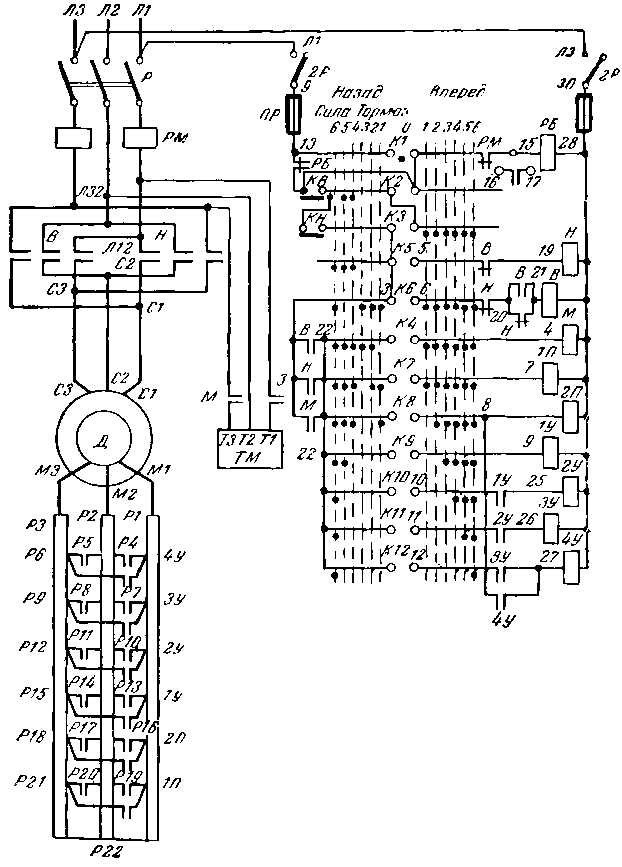
Рис. 33. Схема панели типа ТС.
Статор двигателяДподключается вместе с тормозным магнитомТМ,открывающим тормоз. При включении контактора1Потключается часть сопротивления, затем по мере поворота контроллера замыкаются контакторы ступеней ускорения1У, 2У, ЗУи4У.Для смягчения механической характеристики двигателя небольшая часть сопротивления в каждой фазе (Р1—Р4,Р2—Р5, РЗ—Р6)остается невыключенной, что желательно для хорошей работы электропривода.
Электрооборудование подъемно-транспортных установок,
аппаратура управления мостовых кранов
К аппаратуре управления относятся контроллеры, крановые конечные выключатели и резисторы.
Контроллеры кулачковые предназначены для пуска, остановки, реверса и регулирования скорости крановых электродвигателей как переменного, так и постоянного тока.
Применяются в кранах малой грузоподъемности. Для легких «Л», средних «С» и тяжелых «Т» режимов работы. Переключение контактных групп обеспечивается кулачками вала, приводом которого является маховик (на постоянном токе) или рукоятка (на переменном токе).
Каждое рабочее и нейтральное «нулевое» положения имеют фиксацию.
Для управления асинхронными двигателями применяются кулачковые контроллеры типа «ККТ» различных модификаций, а двигателями постоянного тока—типа «ККП».
Магнитные контроллеры предназначены для управления двигателями механизмов мостовых кранов средней и большой производительности, с большой частотой включений, в напряженных режимах работы.
Применяются в кранах большой и средней грузоподъемности, работающих в средних «С», тяжелых «Т» и весьма тяжелых «ВТ» режимах.
Все переключения в силовых цепях ЭД производятся контакторами, катушки которых получают питание через малогабаритные командоконтроллеры типа «КП», установленные в кабине.
Переключающим органом командоконтроллера является рукоятка.
Магнитные контроллеры наиболее универсальное средство управления крановым электроприводом.
Для управления двигателями механизмов передвижения применяются симметричные командоконтроллеры следующих типов:
• для однодвигательного ЭД серии:
«П» — силовые цепи и цепи управления постоянного тока,
«Т» — силовые цепи и цепи управления переменного тока,
«К» — силовые цепи переменного тока, а цепи управления постоянного тока.
• Для двухдвигательного ЭД серии «ДП, ДТ и ДК», соответственно.
Для управления двигателями механизмов подъема применяются несимметричные командоконтроллеры серии «ПС, ТС и КС», которые позволяют получить низкие посадочные скорости при опускании груза.
Наличие буквы «Л» (например, «КСА») свидетельствует о том, что управление ЭД автоматизировано в функции времени или ЭДС.
Крановые конечные выключатели предназначены для ограничения хода движущихся устройств (мост, тележка, крюк) или блокировки запирающихся устройств (двери кабины или шкафа, люки).
Они представляют собой рычажные выключатели поворотного типа для конечных положений. По устройству — проще, а по работе — надежней, чем нажимные.
По исполнению такие конечные выключатели могут быть:
— с самовозвратом в исходное положение (для механизмов передвижения),
— вращающиеся, связанные с одним из валов механизма подъема (для ограничения верхнего и нижнего положения крюков),
— рычажные, связанные с грузовым приводом (для ограничения верхнего положения крюка).
В схемах управления крановыми ЭП применяются конечные выключатели серии «КУ» различных модификаций.
Резисторы предназначены для пуска, торможения и регулирования скорости ЭП. Кроме того, их устанавливают в других цепях — возбуждения, управления и подъемных электоромагнитов. Резисторы комплектуются в ящики на базе элементов чугунных литых (серия «ЯС»), фехралевых ленточных (серия «КФ») или константановых проволочных (серия «НС»). Из комбинаций этих ящиков подбираются любые необходимые сочетания ступеней сопротивлений. Крановые резисторы выбираются по условиям повторно-кратковременного режима («ПВ» больше для ступеней, которые отключаются последними). Каждая ступень сопротивления должна выдерживать номинальный ток 30 с, независимо от ПВ, %.
Крановые защитные панели предназначены для защиты и управления ЭП крановых механизмов.
Применяются:
— при контроллерном управлении электроприводом кранов,
— при командоконтроллерном управлении ЭП кранов, если отсутствуют собственные аппараты защиты.
На защитной панели установлена аппаратура, обеспечивающая:
— максимальную защиту от токов КЗ и значительных перегрузок (до 2,5 I ном) крановых ЭД,
— «нулевую» защиту, исключающую самозапуск ЭД после перерыва ЭСН,
— надежность работы крана и безопасность обслуживания.
Конструктивно панель выполняется в виде металлического шкафа с аппаратурой. Шкаф закрыт двумя замками, один из которых сблокирован с головным выключателем. Защитная панель размещается в кабине крана
Панели выпускаются для защиты и подключения от 3 до 6 электродвигателей.
На переменном токе при напряжениях 220, 380 и 500 В выпускаются панели типа «ПЗКБ», на постоянном токе при напряжениях 220 и 440 В — типа «ППЗКБ».
Панель защитная типа ПЗК представлена на рис. 3.4-4. Она предназначена для защиты и управления тремя электродвигателями: механизма передвижения моста, механизма передвижения тележки и механизма подъема.

Основные элементы схемы ПЗК:
• ВВ — вводной выключатель, для подключения панели к сети;
• КЛ — контактор линейный, для подключения цепей питания и управ-
ления приводными ЭД;
• РМО и РМ — два блока реле максимального тока, для защиты подво-
дящих линий ЭСН и отдельных ЭД;
• К-М, К-Т и К-П — контроллеры магнитные моста, тележки и подъем-
ного механизма;
• ВА — выключатель аварийного выключения панели,
• ВКЛ. — выключатель контактный люка кабины,
• Кн.Р — кнопка «работа», для подготовки панели к работе от контрол-
леров.
• ТК — троллейные контакты.
• ВКВМ и ВКНМ, ВКВТ и ВКНТ, ВККП — выключатели конечные
(путевые) «вперед» и «назад» моста, «вперед» и «назад» тележки, «крюка» подъемного механизма, для ограничения конечных перемещений. Включение панели в работу осуществляется при закрытой кабине (ВКЛ — включен), включенном «ВВ» и «ВА» нажатием «Кн.Р» кратковременно.
При этом, KB — подключаются силовые цепи механизмов моста, тележки и подъема (КЛ: 1. ..3), — становится на самопитание (КЛ:4, КЛ:5, контроллеры и конечные выключатели всех трех механизмов). Примечание — Для механизма подъема предусмотрен только один конечный выключатель «ВККП», так как нижний предел опускания крюка ие ограничивается. Для защиты трехфазных АД от перегрузок достаточно иметь «РМ» только в одной фазе. Защита от токов КЗ обеспечивается установкой в двух фазах реле максимального тока РМ01 и РМ02. «Нулевая» защита обеспечивается контактором «КЛ».
После срабатывания любого аппарата защиты панель в работу включить можно только после возврата всех контроллеров в положение «О».
Панель защитная типа ППЗК представлена на рис. 3.4-5.

Она предназначена для защиты и управления тремя ЭД постоянного тока механизмов крана того же назначения. Основные элементы схемы ППЗК:
• ВВ — вводной выключатель,
• ВА — выключатель аварийный,
• ТК—троллейные контакты,
• КЛО — контактор линейный обший, для подключения общего силового провода,
• КЛ1, КЛ2, КЛЗ — контакторы линейные «моста», «тележки»,
«подъемного» механизма;
• ЭмТ-М, ЭмТ-Т, ЭмТ-П — электромагниты тормозные «моста», «тележки», «подъемного» устройства;
• Кн.Р — кнопка «работа», для подготовки панели к работе через контроллеры.
• РМО—реле максимального тока общего силового провода,
• PMl, РМ2, РМЗ — реле максимального тока силовых цепей «моста»,
«тележки», «подъемного» механизма;
• ВКВМ н ВКНМ, ВКВТ и ВКНТ, ВККП — выключатели конечные
(путевые) «вперед» н «назад» моста, «вперед» и «назад» тележки, «крюка» «подъемного» механизма,
• Пр. 1, Пр.2—предохранители, для защиты цепей управления оттоков КЗ. Включение панели в работу осуществляется при включенном «ВВ» н
«ВА» нажатием «Кн.Р» кратковременно.
При этом, КЛО — подключается общий силовой провод к ЭП механизмов (КЛО:1),
— становится на самопитание (КЛО:2),
— готовится цепь КЛЗ(КЛО:3).
Примечание— Размыкающий контакт «Кн.Р» предотвращает одновременное включение всех контакторов (КЛО, КЛ1. КЛЗ), что при наличии КЗ в силовой цепи или цепях упрааления могло бы привести к аварии.
Конечные выключатели включены в цепи своих контакторов, поэтому в крайних положениях отключается только двигатель данного механизма, что обеспечивает удобство для работы оператора.
Защита от токов КЗ обеспечивается включением в общий силовой провод реле максимального тока «РМО», а от перегрузки — «РМ», включенных в главную цепь каждого ЭД.
После срабатывания любого аппарата защиты панель в работу включить можно только после возарата всех контроллеров в положение «О».
Тормозные устройства.
Все крановые двигатели оснащены тормозами, предназначенными для его торможения при отключении от сети. Пи этом сокращается не только выбег, но и обеспечивается безопасность (удержание груза в подвешенном состоянии).
По конструкции применяются механические тормоза колодочные, дисковые или ленточные.
По действию на тормозной элемент — это пружинные (с приводом от электромагнита) или гидравлические (с приводом от электрогидротолкателя).
Колодочный пружинный ЭМТ представляет собой конструкцию, состоящую из 3 основных частей:
— тормозного шкива с охватываемыми колодками,
— мощной пружины,
— электромагнита.
При подаче питания на электромагнит пружина сжимается, а колодки с помощью системы рычагов разводятся, освобождая тормозной шкив для работы ЭД. При снятии питания — наоборот.
В настоящее время тормозные электромагниты применяются как на переменном токе (одно- и трехфазные), так и на постоянном.
Катушки электромагнитов включаются и отключаются одновременно с электродвигателем (ЭД).
Основными показателями электромагнитов являются: рабочее напряжение (Up), продолжительность включения катушки (ПВ), ход подвижной части (якоря), тяговое усилие (FT), допустимое число включений в час.
Катушки электромагнитов переменного тока подключаются параллельно статору АД а постоянного тока — параллельно или последовательно с якорем ДПТ.
Катушки параллельного включения имеют большое количество витков, а следовательно, — большую индуктивность и малое быстродействие.
Для увеличения быстродействия катушки ее рассчитывают на пониженное напряжение, поэтому сразу подается полное напряжение сети, а после срабатывания в цепь катушки включается добавочный резистор, ограничивающий ток в ней.
Этим достигается форсированное (ускоренное) срабатывание электромагнита при большом усилии.
Для удержания втянутого якоря усилие требуется меньше, что обеспечивается включенным резистором.
Для защиты катушки от пробоя изоляции (при отключении ее от сети) на корпусе электромагнита установлено разрядное сопротивление.
ЭМТ с катушками последовательного включения имеют большее быстродействие и простую схему включения (не требуется разрядных и токо-ограничивающих резисторов).
Существенным недостатком является зависимость тягового усилия (FT) от тока нагрузки (/я) двигателя. Поэтому их целесообразно применять для механизмов передвижения, где ток якора в процессе работы меняется сравнительно незначительно.
Тормозные электромагниты отличаются формой, массой, тормозным усилием и выпускаются, как и крановые двигатели с ПВ = 15,25,40 и 60 %.
Недостатками таких тормозов являются:
— резкость включения, сопровождающаяся ударами якоря электромагнита о магнитопровод,
— большие броски переменного тока,
— возможность перекоса рычагов привода пружин.
Электрогидравлический тормоз (ЭГТ).
Такая конструкция позволяет устранить предыдущие недостатки, что обеспечило в последнее время и большую применимость.
ЭГТ имеют:
— большую надежность при эксплуатации,
— возможность регулирования быстродействия и плавности торможения^
— легкую управляемость при создаваемых значительных тормозных усилиях.
Такой тормоз состоит из 3 основных частей:
— тормозного шкива с охватывающими колодками,
— гидротолкателя, связанного со штоком поршня и пружинами,
— системы гидравлики (гидронасос с приводом от АД с КЗ-ротором, поршень со штоком, резервуар с маслом).
При включении АД масло из нижней части резервуара перекачивается под поршень, который, поднимаясь вверх, поворачивает штоком рычаги гидротолкателя, преодолевающего усилие пружин. Тормозные колодки разводятся системой рычагов, ЭП растормаживается.
При отключении АД насос останавливается, поршень со штоком опускается вниз, тормозной шкив зажимается колодками под действием пружин
Наша промышленность выпускает электрогидротолкатели с рабочими усилиями Fт = 160,250, 500, 800 и 1600 Н. Указанные усилия обеспечиваются при U >= 0,9 Uном, числе включений в час от 700 до 2000 к ПВ = 100 %. Время срабатывания ЭГТ находится в пределах от 0,6 до 1,5 с. Иногда их можно использовать как регуляторы скорости электропривода крановых механизмов.
Грузоподъемные электромагниты предназначены для зацепления ферромагнитных материалов при транспортировке и снятия их при доставке на место.
По форме отечественная промышленность выпускает круглые и прямоугольные электромагниты.
Электромагнит состоит из 3 основных частей:
— корпуса с полюсными башмаками,
— катушечной обмотки, залитой компауидной массой,
— устройства токоподвода.
Электромагнит подвешивается к крюку цепями. Токоподвод осуществляется гибким кабелем, намотанным на барабан. При опускании кабель автоматически сматывается, а при подъеме — наматывается
Подъемная сила крана определяется температурой и характером поднимаемого груза.
Груз большой плотности (сплошные металлические изделия в виде плит, болванок и т.п.) требует увеличения подъемной силы, а малой плотности (скрап, стружка и т.п.) — уменьшения.
С ростом температуры груза магнитная проницаемость снижается, а при 720 °С достигает нулевого значения. Подъемная сила тоже снижается до «нуля», что следует учитывать при эксплуатации.
Катушки электромагнитов питаются постоянным током, имеют большую индуктивность и значительный поток остаточного магнетизма.
Следовательно, должны обеспечиваться меры, ограничивающие (во избежание пробоя изоляции) перенапряжения, и быстрое освобождение груза.
Вся аппаратура управления помещена в кабине крановщика.
Подъемные электромагниты имеют повторно-кратковременный режим работы с ПВ = 50 % и временем цикла не более 10 мин.
Выбираются по напряжению, режиму работы, потребляемой мощности, поднимаемому грузу и его температуре.
Управление электромагнитом можно рассмотреть в соответствии с представленной схемой (рис. 3.4-6).

Основные элементы схемы:
• ЭМ — электромагнит (катушка), для создания подъемной силы уст-
ройства;
• KB и КР — контакторы включения и размагничивания, для коммута-
ции цепей «ЭМ» для захвата или отпускания груза;
• Rl, R2, R3 — резисторы цепей ЭМ и КР;
• КК — командоконтроллер («отключено» — «включено»), для управ-
ления электромагнитом;
• ВВ — вводной выключатель (рубильник), для обеспечения видимого
подключения (отключения) питания.
• Пр.1, Пр.2 — предохранители, для защиты оттоков КЗ цепей питания
и управления.
ЭЛЕКТРИЧЕСКИЕ СХЕМЫ КОНТРОЛЛЕРНОГО УПРАВЛЕ-НИЯ ДВИГАТЕЛЯМИ КРАНОВЫХ МЕХАНИЗМОВ
Схемы управления крановыми двигателями могут быть симметричными и не-симметричными относительно нулевого положения силового контроллера или ко-мандоконтроллера. Симметричные схемы применяют для приводов механизмов пе-редвижения, а в некоторых случаях и для приводов механизмов подъёма. В таких схемах при одинаковых по номеру положениях рукоятки (маховичка) контроллера при движении в разные стороны двигатель работает на аналогичных характеристи-ках w=f(М). Несимметричные схемы используют для приводов механизмов подъёма, когда при подъёме и спуске груза требуется, чтобы двигатель работал на различных характеристикам так как обычно Vс=Vп.
На рис. 3-10, а показана электрическая схема управления асинхронным двига-телем с фазным ротором посредством контроллера типа ККТ-61А, который имеет симметричную схему и применяется для механизмов передвижения и подъёма. Напряжение на контроллер подается через панель ПЗК. Одна фаза ЛЗ питающей сети подводится к статору двигателя Д непосредственно, а две фазы Л1 и Л2 — через контроллер. В первом положении Вперёд (Подъём) рукоятки контроллера замкнуты контакты КЗ, К7 (рис. 3-10,6) и статор двигателя включается в сеть при полностью введенных сопротивлениях в цепи ротора. В первом положении Назад (Спуск) замкнуты контакты К1 и К5, чем обеспечивается изменение порядка чередо-вания фаз напряжения на зажимах статора С1, С2 и СЗ. Одновременно со статором двигателя в сеть включается тормозной электромагнит ЭмТ, расторма — живающий механизм (троллейный токоподвод, показанный на схеме, применяется только для привода подъёма).
При дальнейшем перемещении рукоятки контроллера в положения 2—5 Вперёд (Подъём) или Назад (Спуск) замыкаются контакты К2, К4,К6, К8, К10 и шунтируются ступени пусковых резисторов в цепи ротора двигателя. Резисторы выводятся по фазам несимметрично, что позволяет уменьшить число переключающих контактов контроллера при требуемом числе пускорегулировочных ступеней и получить механические характе-ристики (рис. 3-10,в), обеспечивающие требуемый режим работы механизма. При пуске оператор должен переводить рукоятку контроллера из одного положения в другое с не-которым интервалам времени, в противном случае могут возникнуть недопустимые брос-ки токов и моментов двигателя. Характеристика 1 с малым моментом при w=0 исполь-зуется для устранения люфтов в редукторах и слабины канатов при пуске двигателя.
При опускании средних и тяжёлых грузов с полной скоростью двигатель работает в генераторном режиме (например, при моменте МС1 угловая скорость — w1). Пониженную угловую скорость в этом случае можно получить на положении контроллера 1 Подъём (например, угловая скорость — w1 при Мс1), т. ё. при работе двигателя в режиме противо-включения.
Лёгкие грузы, не преодолевающие трение в механизме, и пустой крюк опускаются при работе двигателя в двигательном режиме на положениях контроллера Спуск (напри-мер, при моменте — М02 угловая скорость спуска на характеристике 5 будет — w2, а на характеристике 1 — более низкая скорость — w2).
Схема обеспечивает защиту двигателя от перегрузок по току с помощью группово-го максимального реле РМ (РМ1-РМЗ). С помощью контактов К9, КН, К12 создаются цепи конечной и нулевой защиты. Все виды защит действуют на отключение контактора КЛ, как и предусмотрено в панелях ПЗК.

Для управления двигателями постоянного тока последовательного возбуждения применяются контроллеры типа ККП-101 (для механизмов передвижения), которые (имеют симметричную схему, и типа ККП-102 (для механизмов подъёма) с несиммет-ричной схемой.
Дата добавления: 2014-11-13 ; просмотров: 41 ; Нарушение авторских прав
Большая Энциклопедия Нефти и Газа
Контроллерное управление
Контроллерное управление крановыми двигателями с пускорегу-лирующими резисторами, введенными в цепь ротора, обеспечивает получение в момент пуска необходимых крутящих моментов для преодоления инерции масс груза и крана. [1]
Контроллерное управление крановыми двигателями с пускорегули-рующими сопротивлениями, введенными в цепь ротора, обеспечивает получение в момент пуска необходимых крутящих моментов для преодоления инерции масс груза и крана. [2]
Контроллерное управление должно быть в кабине удобно смонтированным, обеспечивать легкость включения и выключении отдельных механизмов и не допускать самопроизвольных выключений. [3]
При этом контроллерное управление обеспечивает плавное регулирование и низкие скорости опускания груза. [4]
Монтажная схема контроллерного управления двигателями четырехмоторного мостового крана, осуществленная с помощью нормальной аппаратуры, показана на фиг. На монтажные схемы, являющиеся основным рабочим чертежом, обычно наносятся сечения и марки проводов и указания, необходимые при монтаже. [5]
Схемы с контроллерным управлением двигателями крана в зависимости от характера нагрузки могут быть симметричными и несимметричными. В механизмах передвижения и поворота, момент сопротивления которых не зависит от направления движения, применяют контроллеры ( командоконтроллеры) с симметричной диаграммой замыкания контактов. Двигатели в таких схемах работают при движении вперед и назад на одинаковых характеристиках. [7]
Автоматизированная схема имеет контроллерное управление дистанционного действия ; переключения в схеме производятся при помощи релейно-контакторных аппаратов, смонтированных на общей панели. Вспомогательные цепи управляются при помощи командоконтроллера. Такая схема носит название схемы магнитного контроллера. Действие элементов схемы происходит следующим образом. [8]
У кранов-манипуляторов с электрическим контроллерным управлением включение контактора защитной панели ( вводного устройства) должно быть возможно только в том случае, если все контроллеры находятся в нулевом положении. Допускается контакты нулевой блокировки магнитных контроллеров с индивидуальной нулевой защитой в цепь контактора защитной панели не включать, если на пульте управления будет установлена световая сигнализация, информирующая о положении магнитного контроллера. [9]
Нулевая защита электродвигателей с контроллерным управлением осуществляется с помощью нулевых контактов контроллеров, включенных последовательно в цепь катушки линейного контактора защитной панели. [10]
Защитные панели устанавливаются при контроллерном управлении двигателями крана, а также с некоторыми магнитными контроллерами, когда последние не имеют собственной аппаратуры защиты. На защитной панели монтируется электроаппаратура, осуществляющая максимально-токовую защиту при коротких замыканиях и значительных перегрузках ( свыше 225 %) крановых двигателей, а также нулевую защиту. Пуск двигателей крана невозможен, если все контроллеры не поставлены в нулевое положение. В схему защитной панели включают также контакты различных аппаратов, обеспечивающих надежность работы крана и безопасность его обслуживания, например, контакты конечных выключателей, блок-контакты силовых контроллеров, контакты люка кабины, ограничителя грузоподъемности, аварийного выключателя. [11]
Крановые защитные панели применяют при контроллерном управлении двигателями крана, а также вместе с некоторыми магнитными контроллерами, не имеющими собственных аппаратов защиты. На защитной панели установлена электроаппаратура, осуществляющая максимальную защиту от токов к.з. и значительных ( свыше 250 %) перегрузок крановых двигателей, а также нуле — вую защиту, исключающую самозапуск двигателей после перерыва в электроснабжении. В схему защитной панели вводят контакты различных аппаратов, обеспечивающих надежность работы крана и безопасность его обслуживания, например контакты конечных выключателей, контакты люка кабины и аварийного выключателя, вспомогательные контакты силовых контроллеров. [12]
Механические характеристики асинхронного двигателя при контроллерном управлении ( рис. 2 — 8) обеспечивают вполне удовлетворительный режим работы механизмов передвижения. [14]
На подъемных кранах постоянного тока с контроллерным управлением аппаратура защиты электрооборудования подъемной лебедки и механизмов передвижения располагается на защитной панели. На рис. 3.17 приведена схема стандартной трехдвигательной панели типа ППЗК. Максимальная защита выполнена на групповом реле, допускающем установку четырех сменных блок-реле с общим контактом РМ. В один полюс каждого двигателя включена отдельная катушка реле, а во второй — общая для всех двигателей катушка реле РМО, осуществляющего защиту крановой сети. Зона действия механизмов передвижения моста и тележки, в отличие от механизма подъема, ограничивается в двух направлениях. Передвижение механизма за пределы рабочей зоны приводит к отключению двигателя. [15]