Электрическая схема управления шагового двигателя
Электрическая схема управления шагового двигателя
Пропорциональное управление шаговым двигателем
Автор: МКС, uels73@mail.ru
Опубликовано 14.08.2013
Создано при помощи КотоРед.
Описываемое ниже устройство позволяет управлять униполярным шаговым двигателем типа СДХ 1,8/40 и аналогичным. Схема электрическая принципиальная блока управления изображена на рис.1. Он выполнен на базе микроконтроллера ATmega 8 работающего от встроенного тактового генератора на частоте 2 МГц. В качестве ключей, коммутирующих обмотки шагового двигателя М1, использованы логические элементы микросхем DD2, DD3 типа SN75452 (русский аналог — К155ЛА18). Это микросхемы – повышенной мощности с открытым коллекторным выходом.
Блок поддерживает пропорциональное и дискретное управление мотором. В режиме пропорционального управления — угол поворота ротора двигателя, задается переменный резистором R1. В режиме дискретного управления — вращение двигателя «влево», «вправо», «стоп» осуществляется кнопками S1 и S2. Кроме этого, в схеме можно выбирать шаговый или полушаговый режим работы, а также скорость вращения двигателя.
Установкой перемычки X4 выбирается пропорциональное управление, а при ее отсутствии – дискретное управление. Перемычкой X5 определяется шаговый и полушаговый режим работы двигателя. Все эти режимы работы инициализируются только в момент включения схемы или сброса микроконтроллера. Поэтому нужные перемычки необходимо установить перед включением питания. В микроконтроллере задействованы два канала АЦП. На вход одного из них – ADC5 (28 ножка) подключен подстроечный резистор R3. С его помощью регулируется скорость вращения двигателя при любом режиме работы схемы.
В режиме пропорционального управления задействуется еще один канал АЦП – ADC4 (27 ножка). На его вход через интегрирующую цепь R2, C1 подключен переменный резистор R1, который задает угол поворота ротора мотора. Скорость работы АЦП в данной управляющей программе осуществляет преобразования с 8 — битной точностью. Поэтому положение ручки переменного резистора R1 программа контроллера условно разбивает на 255 шагов. После включения питания, программа выполняет калибровку положения ротора шагового двигателя. Для этого, перед началом работы, автоматически выполняется команда «вращение двигателя влево» до тех пор, пока флажок, закрепленный на роторе мотора, не «доедет» до концевого датчика (оптопары) VT1, HL1. При поступлении сигнала с датчика VT1, программа обнуляет регистр-счетчик количества шагов двигателя, измеряет напряжение на выходе переменного резистора R1, преобразует его в цифровой код в диапазоне от 0 до 255, записывает его в старший байт регистра результата преобразования АЦП (это количество шагов переменного резистора R1), а затем сравнивает его содержимым регистра-счетчика количества шагов двигателя. Если число шагов резистора R1 больше чем шагов двигателя М1, то выдается команда: «вращение двигателя вправо». При этом с каждым шагом ротора происходит инкремент счетчика шагов двигателя и его сравнение с числом в регистре АЦП (шаги резистора R1). Когда число шагов двигателя станет равно числу в регистре АЦП, выполняется команда: «стоп». Поворачивая ручку резистора R1 «влево», уменьшается уровень постоянного напряжения на входе АЦП. При этом число в регистре результата преобразования АЦП станет меньше чем текущее значение регистра — счетчика шагов. В этом случае выдается команда: «вращение двигателя влево». С каждым шагом двигателя происходит декремент регистра-счетчика шагов двигателя до тех пор, пока числа в обоих регистрах не станут равны. Таким образом, вращая ручку переменного резистора R1, ротор двигателя поворачивается в том же направлении и на такое же количество шагов.
Отмечу, что предлагаемый двигатель совершает один оборот на 360° за 200 шагов (т.е. один шаг – 1,8 град.). Следовательно, в данной схеме, за 255 условных шагов от переменного резистора R1, ротор мотора сделает более одного оборота и повернется на угол 459°. Поэтому для ограничения угла поворота двигателя используется концевой датчик (оптопара) для крайнего правого положения ротора. Он выполнен на элементах VT2, HL2. Для более точного копирования угла поворота ручки переменного резистора ротором двигателя необходимо установить в разрыв вывода сопротивления R1, подключенного к «+5 В», ограничительный резистор Rогр.. Его номинал следует тщательно подобрать (в пределах от 1 до 3 кОм).
В управляющей программе предусмотрена функция повторной калибровки положения ротора двигателя в процессе работы устройства. Например, в случае проскальзывания шагов ротора, по какой либо причине (двигатель перегружен, зацепился за что-то и т.д.), можно повернуть ручку переменного резистора R1 в крайнее левое положение и подождать 2 — 3 секунды. При этом происходит проверка положения флажка ротора с помощью оптического датчика крайнего левого положения VT1. Если флажок не зашел в зону срабатывания датчика, значит в процессе работы произошло смещение шагов ротора мотора М1 относительно шагов резистора R1. В этом случае запускается программа повторной калибровки системы, и работа устройства восстанавливается.
Для работы схемы в режиме пропорционального управления оптический датчик крайнего левого положения и калибровки VT1 — обязателен. Датчик крайнего правого положения VT2 можно не ставить, если нет необходимости в ограничении положения ротора при вращении вправо. Но, тогда, необходимо 14 вывод микроконтроллера подключить к +5 В.
При пропорциональном управлении двигателем в полушаговом режиме ротор совершает поворот в пределах от 0° до 230°. Мощность мотора уменьшается, зато увеличивается плавность хода. Это необходимо учитывать при выборе этого режима работы.
В режиме дискретного управления вращение «вправо» осуществляется кнопкой S1, вращение «влево» — кнопкой S2. Если кнопки не нажаты, выполняется команда «стоп». Программа калибровки двигателя и переменный резистор R1 в этом режиме не используются. Оптические датчики VT1, HL1 и VT2, HL2 работают как ограничители крайних положений ротора двигателя М1. Если ограничение вращения не требуется, то эти оптопары можно не ставить. Но при этом необходимо выводы 14, 15 микроконтроллера припаять к +5В.
В случае необходимости контроля над работой шагового двигателя другими (внешними) устройствами, в схеме предусмотрены специальные выходы на старших пинах порта D микроконтроллера. На выводе PD7 «step» формируется кратковременный импульс прямоугольной формы при каждом шаге двигателя (может пригодиться для внешнего счетчика шагов). Вывод PD6 «rewers» – сигнал реверса двигателя (лог. 0 — вращение вправо, лог. 1 – вращение влево). При обнулении (сбросе) программного счетчика — регистра количества шагов, на выводе PD5 формируется кратковременный импульс «reset». Эти выходы работают и в режиме пропорционального управления.
Управляющая программа для микроконтроллера написана на языке Ассемблер. Файл прошивки прилагается. Кроме этого, необходимо запрограммировать фьюзы: CKSEL0=0, CKSEL1=1, CKSEL2=0, CKSEL3=0, SUT0=0, SUT1=1, SKOPT=1.
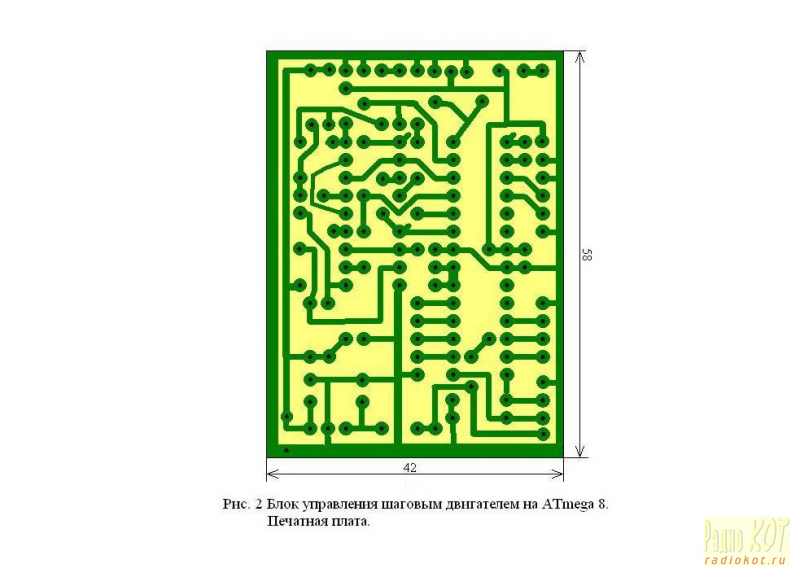
Печатная плата блока управления изображена на рис. 2. Она изготовлена из одностороннего фольгированного стеклотекстолита размерами 42 × 58 мм. В прикрепленном файле с расширением .lay прилагается рисунок для «лазерно-утюжной» технологии изготовления платы. Расположение элементов схемы на печатной плате приведено на рисунке 3.
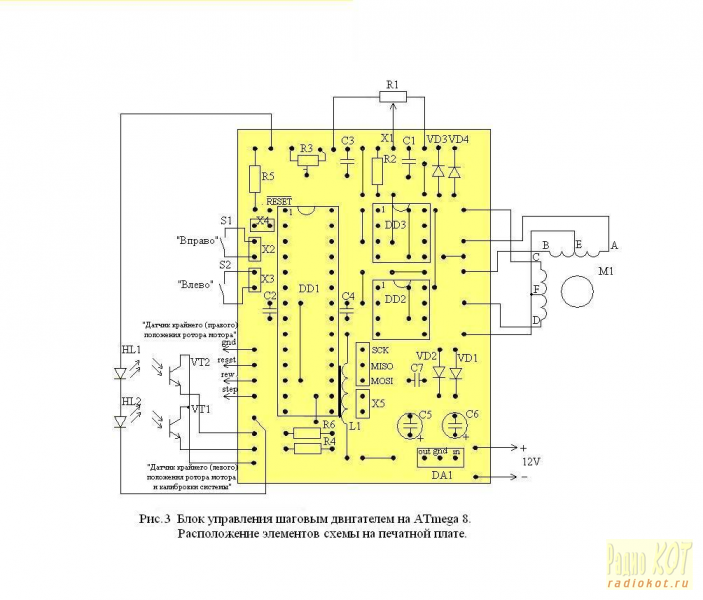
После установки микросхемы – стабилизатора DA1, к ней, необходимо прикрутить радиатор площадью не менее 4 см². Собранная конструкция представлена на фото. 1 и фото. 2.


Как уже отмечалось, логические микросхемы SN75452 можно заменить русским аналогом — К155ЛА18. Раньше они использовались в старых пятидюймовых флоппи дисководах вместе с предлагаемым шаговым двигателем.

Предлагаемый блок может быть использован в различных устройствах с электромеханическим приводом. Например, у меня два таких модуля с шаговыми двигателями пропорционально управляют видеокамерой наблюдения с удаленным доступом по двум осям координат. Один мотор поворачивает камеру по оси Х, другой – по оси Y (фото. 3).
Видеоролик о работе девайса:
Плата драйвера двухфазного биполярного шагового двигателя X-NUCLEO-IHM02A1
X-NUCLEO-IHM02A1 – плата расширения на основе драйвера L6470 двухфазного биполярного шагового двигателя с поддержкой микрошагового режима. Плата представляет собой доступное и удобное для применения решение для низковольтного управления шаговым двигателем в проекте STM32 NUCLEO.
В изделии установлены две микросхемы полностью интегрированного драйвера L6470, использующего для управления шаговым двигателем команды, принятые по интерфейсу SPI. При подключении к одной из плат семейства STM32 NUCLEO, плата X-NUCLEO-IHM02A1 способна управлять одним или двумя шаговыми двигателями. В качестве платы управления драйвером производитель рекомендует использовать NUCLEO-F401RE, NUCLEO-F302R8 и NUCLEO-F072RB, для которых производителем было написано и протестировано соответствующее firmware. (Для корректного использования платы расширения с NUCLEO-F401RE следует удалить на управляющей плате перемычку SB15 ).
X-NUCLEO-IHM02A1 оборудована Arduino UNO R3 разъемами, и, кроме того, совместима с коннекторами Morpho. Одна или более из этих плат расширения могут быть подключены к STM32 NUCLEO для управления одним или более шаговыми двигателями.
Изделие представляет собой референс-дизайн. На сайте производителя размещена соответствующая документация (гербер, BOM, схема принципиальная электрическая и др.).
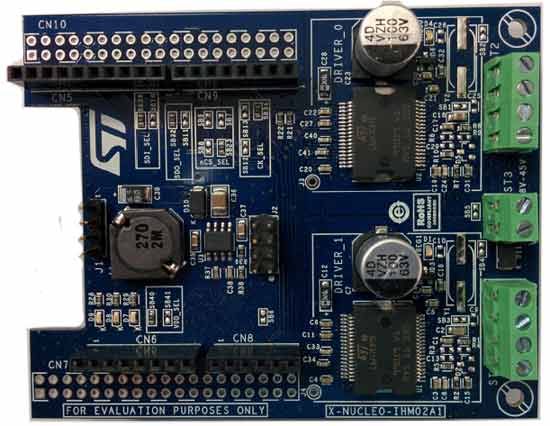
Рис. 1. Плата драйвера шагового двигателя X-NUCLEO-IHM02A1
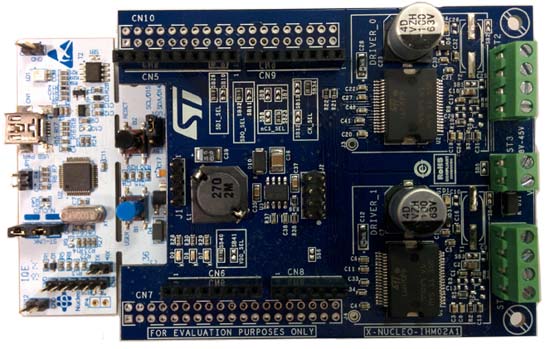
Рис. 2. Плата драйвера шагового двигателя X-NUCLEO-IHM02A1, подключенного к одной из плат STM32 NUCLEO
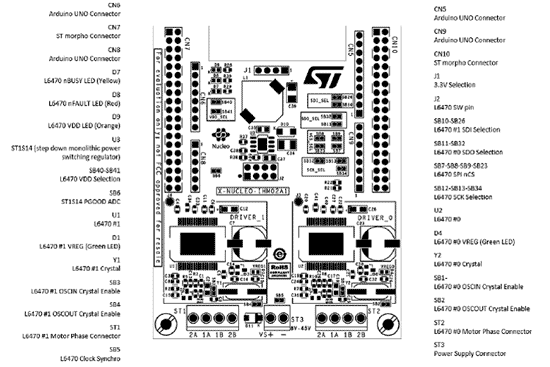
Рис. 3. Положение джамперов и разъемов драйвера шагового двигателя X-NUCLEO-IHM02A1
Отличительные особенности:
- Рабочее напряжение: 8 V — 45 V DC;
- Пиковый выходной ток 7 A (3 A среднеквадратическое значение) для каждого драйвера двигателя;
- Напряжение питания цифровой части можно выбрать (3.3 В или 5.0 В) с помощью резистора 0 Ом (обеспечивается платой управления);
- Питание цифровой схемы 3.3 В может быть обеспечено:
- платой STM32 Nucleo,
- понижающим монолитным импульсным стабилизатором напряжения, установленным на плате расширения (через джампер выбора, он может также быть использован для питания STM32 Nucleo);
- USART:
- обеспечивает прием команд от PC,
- позволяет передавать информацию на PC,
- не требует специального кабеля; использует кабель Type A — Type Mini — BUS B, уже используемый для питания платы STM32 Nucleo;
- SPI интерфейс (может быть подключен к конфигурационной «гирлянде»);
- Плата оборудована разъемом Arduino UNO R3;
- Совместима с разъемом ST morpho;
- Пять светодиодов:
- 2 зеленых, для индикации работы каждого L6470,
- 1 оранжевый, индицирует, что напряжение питания цифровой схемы включено,
- 1 желтый, индицирует, когда любой L6470 находится в состоянии «занят» (busy),
- 1 красный, индикация возникновения неисправности (потеря шага, OCD, предварительное предупреждение о перегреве или выключение, UVLO, некорректная команда, неисполняемая команда) для каждого L6470;
- RoHS совместимость.
Электрическая схема управления шагового двигателя





Линейка поставок



















Пластиковый кабельный сальник M16 x 1.5 метрический 50.616PA7001 с превосходной разгрузкой натяжения. Читать далее >

Cерия подходит для многих тяжелых промышленных применений, требующих повышенной электромагнитной сов. Читать далее >

Залитый трансформатор для монтажа на плату серии EI 305 для для печатных плат, бытовой техники немец. Читать далее >

Гибкий кабель со специальной PVC-оболочкой и с разметкой метража производства HELUKABEL Читать далее >

Компактный и надёжный блок питания серии S8VK мощность 480 Вт на DIN-рейку для суровых условий экспл. Читать далее >

Источник постоянного тока 60 W 12 VDC 5 A для электронных приборов и оборудования промышленной автом. Читать далее >
04080, Киев, ул. Викентия Хвойки, д. 18/14,
бизнес-центр «Ост-Вест Экспресс», офис 710
Телефон: +38 (044) 451-48-34
Телефон: +38 (093) 896-40-88
Электронная почта: office@west-L.com
Просим обратить Ваше внимание на то, что данный сайт носит информационный характер и не является публичной офертой. Для получения детальной информации о стоимости компонентов и сроках поставки обращайтесь к нашим менеджерам.
Контроллер микрошагового управления двухфазным шаговым двигателем с электрическим дроблением основного шага
Способы управления фазами шагового двигателя
Известны следующие способы электрического дробления основного (конструктивного) шага при управлении фазами шагового двигателя (ШД) [1, 4, 5]:
- естественное дробление: полношаговый и полушаговый режимы;
- искусственное дробление: микрошаговый режим.
Изменение цены шага при естественном дроблении достигается исключительно за счет изменения комбинации включения обмоток ШД. На рис. 1 приведены номограммы векторов статического (вращающего) момента в соответствующих режимах.

Рис. 1. Естественные режимы коммутации фаз двухфазного ШД:
а) полношаговый с включением одной фазы;
б) полношаговый с включением двух фаз;
в) полушаговый
По сравнению с полношаговым режимом полушаговый имеет следующие преимущества:
- более высокая разрешающая способность без применения более дорогих двигателей;
- меньшие проблемы с явлением резонанса. Резонанс приводит лишь к частичной потере момента, что обычно не мешает нормальной работе привода.
Недостатком естественных режимов дробления является небольшой коэффициент дробления, а также довольно значительное колебание вращающего момента от шага к шагу. В тех положениях ротора, когда запитана одна фаза, момент составляет примерно 70% от полного, когда запитаны две фазы. Эти колебания могут явиться причиной повышенных вибраций и шума.
Искусственное дробление шага предполагает одновременное управление током не менее чем в двух фазах ШД [1, 5]. Чтобы получить нужное направление магнитного поля, необходимо выбрать не только правильное направление токов в катушках, но и правильное соотношение этих токов.
Если одновременно запитаны две обмотки двигателя, но токи в этих обмотках не равны (рис. 2), то результирующий момент M = (MA 2 +MB 2 ) 0,5 , а точка равновесия ротора сместится в точку х = (S/(π/2)) × arctan(MB/MA), где MA и MB — момент, создаваемый первой и второй фазой соответственно, M — результирующий момент удержания, x — положение равновесия ротора в радианах, S — угол шага в радианах.

Рис. 2. Зависимость момента от угла поворота ротора в случае разных значений тока фаз
Смещение точки равновесия ротора говорит о том, что ротор можно зафиксировать в любой произвольной позиции. Для этого нужно лишь правильно установить отношение токов в фазах. Именно этот факт используется при реализации микрошагового режима. К тому же меньший угол шага способен обеспечить более точное позиционирование.
Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/32 и даже меньше.

Рис. 3. Номограмма статического момента
Функции изменения токов в фазах выбирается при этом таким образом, чтобы исходные статические характеристики в совокупности обеспечивали постоянство амплитуды и формы статического (вращающего) момента ШД (рис. 3). Это возможно только если кривые статического момента, создаваемые отдельными фазами ШД, и суммарная статическая характеристика будут синусоидальными функциями угла рассогласования (рис. 4) между осями полюсов магнитных полей статора и ротора [1, 2].

Рис. 4. Микрошаговый режим управления двухфазным ШД
В общем случае микрошаговый режим управления ШД позволяет, в зависимости от задаваемого коэффициента дробления основного шага ШД, увеличить приемистость (приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке), значительно уменьшить величину отрабатываемых единичных шагов и тем самым повысить точность позиционирования, исключить ударные нагрузки в механической части дискретного привода и существенно улучшить плавность его хода, устранить резонансные явления [1, 4].
Структурная блок-схема устройства микрошагового управления двухфазным ШД
Структурная блок-схема устройства микрошагового управления двухфазным ШД приведена на рис. 5. Входной контроллер вырабатывает определенную последовательность импульсов, которую логический блок использует для формирования адресов ячеек постоянного запоминающего устройства (ПЗУ), в которых хранятся коды фазных токов ШД текущего шага. С выхода ПЗУ эти коды загружаются в цифро-аналоговые преобразователи (ЦАП), на выходах которых формируются напряжения, пропорциональные токам фаз ШД. Эти напряжения усиливаются линейными усилителями мощности (ЛУМ) и через коммутаторы подаются на обмотки ШД. Одновременно логический блок вырабатывает коды управления коммутаторами, обеспечивая правильность подключения обмоток ШД к выходам ЛУМ.

Рис. 5. Структурная блок-схема устройства микрошагового управления двухфазным ШД
В современных системах управления ШД управляющий контроллер (часть блок-схемы, выделенная серым цветом) выполняется либо в виде дорогостоящей специализированной микросхемы, возможности которой ограничены (в смысле изменения коэффициента дробления), либо используются микроконтроллеры (МК). Современные МК имеют встроенные таймеры, ЦАП и т. д., которые можно использовать для реализации микрошагового режима практически с любым коэффициентом дробления (программными средствами без усложнения аппаратурного содержания) взамен специальных контроллеров [2, 4].
Функциональная схема устройства микрошагового управления двухфазным ШД
Функциональная схема устройства микрошагового управления двухфазным ШД, контроллер которого реализован на МК, приведена на рис. 6. В устройстве использован микроконвертер ADuC812 [3, 7].

Рис. 6. Функциональная схема микроконтроллерного устройства микрошагового управления двухфазным ШД:
МК — микроконтроллер;
ЛУМ — линейный усилитель мощности;
АК — аналоговый ключ;
ФА, ФВ — обмотки фаз ШД
Выбор АК и ЛУМ определяется типом ШД (значениями фазных токов и напряжения питания).
Использование ресурсов микроконвертера:
P3.0 — уменьшение частоты вращения;
P3.1 — увеличение частоты вращения;
P3.2 — запрос внешнего прерывания (INTO) — установка частоты вращения ШД;
P3.3 — запрос внешнего прерывания (INT1) — установка направления вращения;
P3.5 — «0» — точно, «1» — грубо;
P3.7 — «0» — STOP, «1» — START;
DAC0 — выход первого ЦАП;
DAC1 — выход второго ЦАП;
P2.3-P1.0 — порт вывода кода управления аналоговыми коммутаторами (АК);
Т2 — таймер — формирователь длительности дробного шага;
F0 — пользовательский флаг направления;
FI — флаг останова таймера 2.
В таблице приведены коды управления АК, выходные значения напряжений ЦАП1 и ЦАП2 для каждого шага дробления, а также последовательность переключения фаз.










Алгоритм программы управления
На основании функциональной схемы и в соответствии с приведенной таблицей управляющих кодов разработан алгоритм программы управления, приведенный на рис. 7.

Рис. 7. Алгоритм управления ШД в микрошаговом режиме
Программа управления
Программа управления написана на языке Assembler для Intel-МСS51-совместимых микроконтроллеров [5] и отлажена в интегрированной среде разработки приложений Keil-μVision3, основное окно которой с результатами отладки программы показано на рис. 8.

Рис. 8. Окно среды программирования Keil-μVision3 с результатами отладки программы управления
При тактовой частоте микроконтроллера 11,0592 МГц частота вращения ШД находится в диапазоне:
а) в режиме «Точно» 0-100 об/мин;
б) в режиме «Грубо» 100-1000 об/мин.
Программа защищена от зацикливания встроенным сторожевым таймером, настроенным на период сброса, равный 2047,973 мс.
Выводы
Идеальный шаговый двигатель при питании фаз синусоидальным и косинусоидальным током должен вращаться с постоянной скоростью. У реального двигателя в таком режиме будут наблюдаться некоторые колебания скорости. Связано это с нестабильностью воздушного зазора между полюсами ротора и статора, насыщением магнитной системы наличием магнитного гистерезиса, трения, что приводит к погрешностям величины и направления магнитного поля, и т. д. Поэтому положения равновесия и момент имеют некоторые отклонения. Эти отклонения зависят от погрешности формы зубцов ротора и статора и от примененного материала магнитопроводов.
Микрошаговый режим обеспечивает высокую приемистость и точность позиционирования ШД, устраняет колебания ротора вокруг положения равновесия и устраняет резонансные явления.
Полный набор периферийных модулей и встроенных ресурсов микроконтроллера позволяет строить систему управления практически без применения внешних периферийных микросхем (специальных контроллеров). Это дает возможность минимизировать устройство и снизить его стоимость.