
Принцип работы и устройство реактивного двигателя
Принцип работы и устройство реактивного двигателя

Первые двигатели появились давным-давно и преобразовывали мускульную силу животных в полезную для достижения конкретной цели энергию. Простейший пример – лошадь, помогающая крутить эернова мельницы. Затем появились ветряные мельницы, где жернова приходили в движение за счет энергии ветра, иди водяные мельницы, использующие течение рек.
Двигатели, работающие на топливе
Примечательно, что идея была позаимствована у артиллеристов, наблюдая за которыми, Гюйгенс обратил внимание на то, что после выстрела, орудия откатывались в сторону, противоположную выстрелу.
Наработки голландца, а также ряда других заслуженных ученых, значительно облегчили путь создания топливных двигателей, которыми мы пользуемся до сих пор. На место пороха пришли бензин и солярка, обладающие иными физическими свойствами и температурами горения, необходимыми для выделения энергии.
Явление отдачи
Но научные поиски и разработки на этом не прекращались. Как всегда, на помощь пришла природа, которая, в большинстве случаев и наталкивает изобретателей на удивительные открытия.
Наблюдения за морскими жителями, такими как осьминоги, кальмары и каракатицы, привели к неожиданным результатам. Манера движения этих морских обитателей, была схожа с кратковременным толчком. Будто тело отталкивается отчего – то и продвигается вперед.
Эти наблюдения были чем-то схожи с замечаниями Гюегенса про выстрел и пушку, которые мы упоминали выше.
Таким образом, в физики появилось понятие «явление отдачи». В ходе дальнейших научных исследований было выяснено, что именно благодаря явлению отдачи происходит все движение на планете Земля: автомобиль отталкивается от земли, корабль – от воды и т.д.
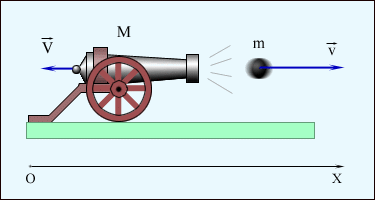
Движение тел происходит благодаря передаче импульса от одного объекта другому. Для объяснения явления приведем простейший пример: вы решили толкнуть своего товарища в плечо, приложили определенную силу, в результате которой, он сдвинулся с места, но и вы испытали силу, отталкивающую вас в противоположную сторону.
Конечно, расстояние, на которое сдвинетесь вы и ваш друг, будет зависеть от ряда факторов: сколько вы весите, как сильно вы его толкнули.
Реактивный двигатель и принцип его работы
Любой из нас способен воочию наблюдать явление реактивной реакции. Все что необходимо, надуть воздушный шарик и отпустить. Каждый знает, что произойдет далее: из шарика будет вырываться поток воздуха, который будет двигать тело шарика в противоположном направлении.
Согласитесь, очень похоже на то, как кальмар, сокращая свои мышцы, создает струю воды, толкающую его в противоположном направлении.
Наблюдения, описанные выше, получили точные научные объяснения, были отображены в физических законах:
- закон сохранения импульса;
- третий закон Ньютона.
Именно на них основывается принцип работы реактивного двигателя: в двигатель поступает поток воздуха, который сгорает в камере внутреннего сгорания, смешиваясь с топливом, в результате чего образуется реактивная струя, заставляющая тело двигаться вперед.
Принцип работы достаточно прост, однако устройство подобного двигателя довольно сложное и требует точнейших расчетов.
Устройство реактивного двигателя

Реактивный двигатель состоит из следующих основных элементов:
- компрессор, который засасывает в двигатель поток воздуха;
- камера внутреннего сгорания, где происходит смешивание топлива с воздухом, их горение;
- турбина – придает дополнительное ускорение потоку тепловой энергии, полученной в результате горения топлива и воздуха;
- сопло, важнейший элемент, который преобразует внутреннюю энергию в «движущую силу» – кинетическую энергию.
Благодаря совместному взаимодействию этих элементов, на выходе реактивного двигателя образуется мощнейшая реактивная струя, придающая объектам, на которых установлен двигатель, высочайшую скорость.

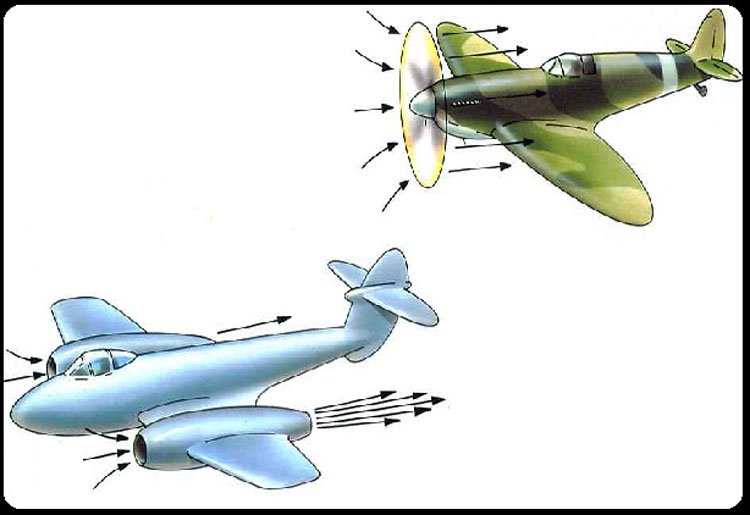
Реактивные двигатели в самолете
Первый реактивный самолет был разработан немцами в 1937 году, а его испытания начались лишь в 1939 году. Однако имеющиеся на то время двигатели потребляли невероятно большое количество топлива и запас хода такого самолета составлял всего лишь 60 км.
В это же время Японии и Великобритании удалось создать собственные самолеты с реактивными двигателями. Но это были лишь опытные экземпляры, так и не поступившие в серийное производство.
Первым серийным реактивным самолетом стал немецкий «Мессершмит», который, однако, не позволил гитлеровской коалиции взять верх в развязанной ими войне.
В гражданской же авиации реактивные самолеты появились лишь в 1952 году в Великобритании.
С тех пор и по настоящие дни, реактивные двигатели являются основными двигателями, применяемыми в самолетостроении. Именно благодаря им, современны лайнеры развивают скорость до 800 километров в час.
Реактивные двигатели в космосе

Как вы уже поняли, наиболее мощным двигателем, способным поднять ракету на высоту во много тысяч километров, являлся именно реактивный двигатель.
Конечно, возникает вопрос: как может работать реактивный двигатель в космосе, в безвоздушном пространстве?
В устройстве ракеты предусмотрен резервуар с кислородом, который смешивается с ракетным топливом и образует необходимую тягу полета ракеты, когда космический корабль покидает атмосферу Земли.
Затем приходит в действие закон сохранения импульса: масса ракеты постепенно уменьшается, сгоревшая смесь топлива и кислорода выбрасывается через сопло в одну сторону, а тело ракеты движется в противоположную.
Ракетные двигатели В.П.Глушко
В.П.Глушко — основатель советского жидкостного ракетодвигателестроения. Но его первый ракетный двигатель был электрореактивный (ЭРД). Тяга в нем возникала благодаря мгновенному испарению тонких полосок металла при нагревании их электрическим током. Скорость истечения газов из таких двигателей на порядок выше, чем в двигателях с химическим топливом. В 1929-1930 годах работая в Газодинамической лаборатории (ГДЛ), В.П.Глушко изготовил опытные образцы ЭРД, провел испытания и доказал их работоспособность. Но из-за малой мощности ЭРД ученый стал работать над разработкой жидкостных ракетных двигателей (ЖРД).
Характеристики ракетного двигателя в наибольшей степени определяются характеристиками компонентов ракетного топлива (КРП), которое в нем применяется. В 1930 г. В.П.Глушко исследовал такие окислители, как азотная кислота, растворы тетроксид азота в азотной кислоте, тетранитрометан, перекись водорода, хлорная кислота. В 1931 г. предложил химическое зажигание и самовоспламеняющееся топливо.
Валентин Петрович сам готовил необходимые смеси, отрабатывал технологию их изготовления и только потом передавал в лабораторию для изготовления и испытаний. Создавая конструкции ЖРД, В.П.Глушко разрабатывал агрегаты для подачи топлива различных типов — поршневые, турбонасосные и др. Многочисленные исследования многих пар КРП дали Глушко возможность сформулировать требования к ним. Исходя из требуемой эффективности ЖРД и эксплуатационных требований, он остановился на паре азотная кислота — керосин. Именно эта пара использовалась в его исследовательских ракетных двигателях (ОРМ-И — ОРМ-65).
Двигатели такого же типа он создавал во время войны для реактивных ускорителей самолетов. Это были РД-1 и другие. Для первой советской ракеты дальнего действия Р-1 (аналог Фау-2), ракет Р-2, Р-5 В.П.Глушко разрабатывает кислородно-спиртовые двигатели РД-100, РД-101, РД-103М с тягой на земле, соответственно — 26, 37, 44 тс). А для первой космической ракеты-носителя Р-7 были разработаны кислородно-керосиновые двигатели РД-107 и РД-108 (тяга на земле (в пустоте), соответственно 83/102 и 76/96 тс). Подвергнув модернизации, эти двигатели работают до сих пор .
Но процесс горения в таких двигателях был недостаточно устойчивым. Кроме того, очень сложно хранить жидкий кислород. Поэтому, разрабатывая ЖРД для боевых ракет, В.П.Глушко вновь возвращается к использованию азотистого окислителя (азотный тетроксид), а в качестве топлива — несимметричного диметилгидразина. Ракеты с такими двигателями могли храниться годами в заправленном состоянии. Вооруженные силы получили действительно боевые ракеты, пригодные для многолетнего дежурства в готовности к немедленному пуску. Но для космических ракет были необходимы мощные двигатели. В азотно-кислотных двигателях РД-253 (тяга 150/166 тс) ракеты «Протон» для повышения мощности В.П.Глушко ввел дожигание газа-окислителя. Впоследствии введение этого же процесса в кислородно-керосиновых двигателях повысило не только их мощность, но и стабильность работы. На этом принципе был создан самый мощный в мире кислородно-керосиновый двигатель РД-170 с тягой 740/806 тс для ракет «Зенит» и «Энергия».
Конечно, усовершенствование ЖРД в КБ В.П.Глушка происходило не только за счет совершенствования ракетных топлив и процесса сгорания. Было обосновано и внедрено немало конструктивных наработок, в том числе — по форме и профилю сопла, охлаждения камеры сгорания, конструкции форсунок и т. Д.
Основана В.П.Глушко школа строительства ракетных двигателей и до сих пор не утратила своих позиций мирового лидера, а созданные в НПО «Энергомаш» им. В.П.Глушка двигатели США покупают для своих ракет «Атлас».
Вентильный реактивный двигатель SRM. Снижение пульсации момента.

Вентильный реактивный двигатель (switched reluctance motor SRM ) является потенциальным кандидатом для использования его в качестве тягового двигателя электромобиля следующего поколения из-за его низкой стоимости, высокой эффективности, способности работать при высоких температурах и в других жестких условиях. Тем не менее, SRM имеют существенный недостаток – это пульсации вращающего момента, что может создавать неприятный шум в транспортных средствах. Компания Continuous Solutions использовала программное обеспечение ANSYS Maxwell для электромагнитного моделирования. В результате удалось снизить пульсации вращающего момента электрической машины на 90 процентов и общий шум на 50 процентов, что позволяет использовать SRM для электрификации транспортных средств сельскохозяйственной, горнодобывающей техники, а также для гражданского применения
Концепция коммутируемого реактивного двигателя ( SRM ) существует уже 180 лет, но до недавнего времени двигатели этого типа использовалась только в промышленных целях из-за сложной системы управления. За последние десять лет мощные микроконтроллерные интегральные схемы и вычислительно-интенсивные стратегии управления сделали SRM более жизнеспособными. Нерешенной проблемой является излучение SRM значительного шума во время работы, который недопустим в таких приложениях, как роскошные легковые автомобили, тактические транспортные средства и другие машины в суровых условиях эксплуатации.
Инженеры Continuous Solutions решают перечисленные проблемы, создавая виртуальные прототипы перспективных конструкций SRM в программном обеспечении моделирования электромагнитного поля ANSYS Maxwell. Алгоритмы управления для подавления пульсаций вращающего момента создаются и исследуются в симуляторе системного уровня ANSYS TwinBuilder , в качестве объекта управления выступает модель SRM в ANSY S Maxwell . Оптимизация пульсаций момента существенно снижает общий шум и вибрацию двигателя.
В итоге электрические машины SRM типа на 20 процентов дешевле, рабочие температуры на 50 процентов выше, чем у аналогичных двигателей с постоянными магнитами.
SRM
В основе работы SRM лежит магнитный поток. Магнитные поля аналогичны электрическому току и предпочитают путешествовать по пути наименьшего магнитного сопротивления потоку. Это объясняет, почему магнитные материалы с низким магнитным сопротивлением, такие как железо и сталь, имеют сильную тенденцию выравниваться с магнитным полем. На статоре SRM расположены концентрические обмотки фаз, а его ротор изготовлен из материала с низким магнитным сопротивлением с чередующимися зонами высокого и низкого сопротивления. При подаче напряжения на обмотку статора, магнитное сопротивление ротора создает силу, которая пытается выровнять полюс ротора, пик низкого сопротивления, с ближайшим полюсом статора. В SRM вращение поддерживается путем последовательного включения и выключения обмоток статора, таким образом, что каждое новое состояние магнитного поля статора вызывает поворот ротора.

Модель SRM в ANSYS Maxwell

Схема асимметричного мостового преобразователя и полученные формы кривых SRM
Ротор может быть изготовлен цельным стальным или набран из тонких стальных штамповок с выемками для магнитных полюсов. Отсутствие постоянных магнитов и обмоток на роторе делает SRM значительно дешевле в производстве чем обычные электродвигатели с постоянными магнитами. В роторе отсутствует токонесущие конструкции, поэтому нет необходимости в коммутаторах и обмотках якоря, как в двигателе постоянного тока, либо в короткозамкнутой обмотке из литого металла, как в асинхронном двигателе. Кроме того, отсутствие постоянных магнитов и обмоток ротора позволяет SRM работать при более высоких температурах окружающей среды, что очень важно в тяговых двигателях транспортных средств.
Пульсации момента
Одна из самых больших проблем при разработке SRM состоит в том, что индуктивность каждой фазы пропорциональна степени совмещения её с полюсами ротора. Избыточная вибрация и акустический шум возникают из-за структурной деформации и гармонических магнитных моментов, возникающих в результате взаимодействия статора и ротора. К этому добавляется относительное резкое изменение индуктивности в зависимости от положения ротора и нелинейного управления.

Результаты ANSYS Maxwell показывают зависимость потокосцепления и вращающего момента, как функции от положения ротора, при различной нагрузке
Эти взаимодействия проявляются как изменения вращающего момента, известные как пульсации вращающего момента. С точки зрения конструкции двигателя, например, дисбаланс в роторе или статоре, также могут вызывать пульсации вращающего момента. Все эти причины приводят к вибрации двигателя, которая создаёт акустический шум и сокращает срок службы механических узлов.
При разработке нового тягового двигателя целью Continuous Solutions являлось создание более дешевого двигателя и привода, которые могут работать при более высоких температурах, чем обычные двигатели с постоянными магнитами, в то же время достигая высоких показателей эффективности, плотности мощности и шума, равных двигателям с постоянными магнитами. Инженеры Continuous Solutions начали с использования собственной многоцелевой пользовательской программы оптимизации трехмерных магнитных эквивалентных цепей ( MEC ) для ускорения процесса исследования пространства проектирования и нахождения перспективных конструкций для дальнейшего исследования. Программа использует генетический алгоритм для изучения различных параметров конструкции, таких как высота зубца статора, ток возбуждения и число пар полюсов, итеративно улучшая цели проектирования, такие как повышение эффективности и уменьшение массы.
Моделирование SRM
Инженеры Continuous Solutions разработали детальные модели перспективных вариантов SRM, определенных программой оптимизации в ANSYS Maxwell . Использовался шаблонно-ориентированный инструмент проектирования RMxprt для быстрого определения геометрии двигателя. Вместо того чтобы рисовать компоненты двигателя, использовались возможности параметрического проектирования в RMxprt для определения магнитной системы SRM : количество полюсов и обмоточные данные и т.д. Корпус двигателя также добавляется к модели с помощью стандартных инструментов.

Векторный график магнитной индукции в сечении SRM
Трехмерная геометрическая модель автоматически создаётся в ANSYS Maxwell для детального анализа магнитного поля методом конечных элементов. Модель содержит все необходимые настройки: движение ротора, механическая нагрузка, коэффициенты потерь в шихтованных стальных пакетах, обмотки фаз, схема управления и многое другое. ANSYS Maxwell рассчитывает рабочие характеристики: вращающий момент в зависимости от скорости, потери мощности, индукция в воздушном зазоре, коэффициент мощности и КПД. Максвелл подготовил отчет о крутящем моменте, который показал вращающий момент двигателя в ньютон-метрах как функцию угла поворота. Для более детального диагностического рассмотрения график магнитной индукции строится в поперечном сечении ротора и статора в ключевые моменты, когда вращающий момент достигает своих экстремумов. Графики показывают, что одним из основных источников шума был является, сжимаемый к ротору силами притяжения, действующими на каждую пару полюсов. Решением этой проблемы может стать усиление статора, но это увеличивает стоимость и вес двигателя.
Разработка системы управления
Вместо того, чтобы искать конструкционное решение для минимизации пульсаций момента, вибрации, Continuous Solutions разработали алгоритм управления для подачи тока в обычно неактивные обмотки в точное время, чтобы нейтрализовать отклоняющиеся векторы силы от активных полюсов. Они разработали алгоритм управления в своих собственных аналитических инструментах и встроили его в обычный инвертор SRM , собранный в ANSYS TwinBuilder. Инвертор в TwinBuilder был подключен к модели двигателя ANSYS Maxwell , рассматривалось взаимодействие SRM со схемой управления с разработанным алгоритмом. Детальные графики нестационарного режима позволили инженерам Continuous Solutions сгладить колебания вращающего момента: как только ротор SRM собирается дергаться влево, контроллер вводит сигнал для рывка вправо, подавляя сопротивление движению в нужном направлении, удаляя волну пульсаций вращающего момента.

Контроллер Continuous Solutions 100 kW SRM MILSPEC с технологией снижения пульсаций вращающего момента
Была усовершенствована как конструкция двигателя, так и алгоритм управления, пока интегрированный двигатель и алгоритм управления не достигли всех поставленных целей. Такой подход позволил за несколько итераций завершить проектирование .
Инженеры Continuous Solutions создали и испытали прототип новой конструкции двигателя. Производительность соответствовала результатам моделирования. Кроме того, для непрерывного производства компания Continuous Solutions заключила стратегическое партнерство с Nidec Motor Corporation , чтобы сделать эту технологию коммерчески доступной. Новый двигатель на 20-50 процентов дешевле, работает на 50 процентов более высоких температурах, чем похожие двигатели с постоянными магнитами, предлагая сопоставимую эффективность, плотность мощности и шумовые характеристики.

График зависимости потокосцепления, как функция от тока и положения ротора

График зависимости момента, как функция от тока и положения ротора

Снижение пульсации крутящего момента в SRM, обеспечиваемое контроллером Continuous Solutions Torque Riple Mitigation
Китайцы создали мощный плазменный реактивный двигатель из микроволновки, компрессора и батарейки
Из китайского Уханя приходят не только плохие новости. В этом городе расположено несколько крупнейших в стране исследовательских институтов, которые способны решать сложнейшие научные задачи. Новое открытие учёных из Института технических наук Уханьского университета намекает на возможный прорыв в разработке реактивных двигателей на плазменной тяге для электросамолётов.
Сам по себе плазменный двигатель не является чем-то новым. Такие двигатели активно используются в космических аппаратах. Тяга там небольшая, но достаточная для небольших корректировок орбиты. Солнца и электричества, которое оно вырабатывает в солнечных панелях спутников, в космосе в избытке. Но для Земной атмосферы космические двигатели не подходят по причине использования ксенона (ксеноновая плазма в атмосфере неэффективна). Учёные из Китая смогли воспользоваться для создания плазмы обычным воздухом, а это путь к работе плазменного двигателя в атмосфере и в авиацию на электрической тяге.
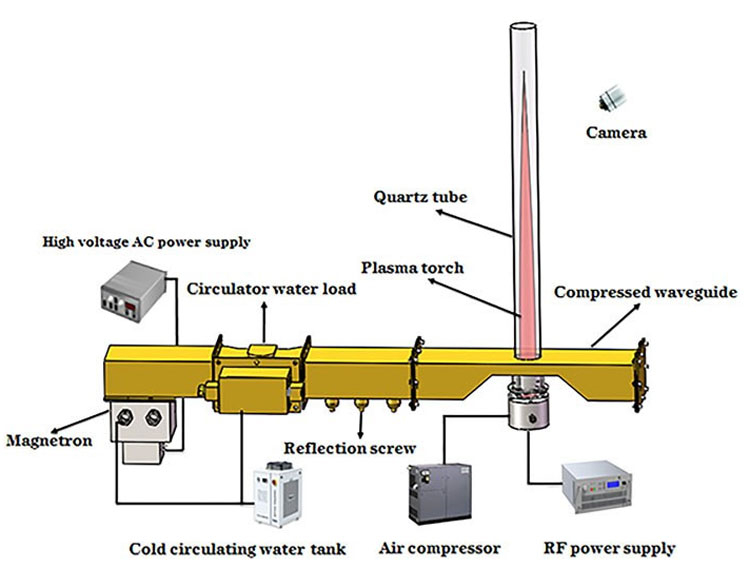
Схема опытной установки
Предложенный китайцами двигатель работает на основе ионизации воздуха. Воздух под давлением подаётся компрессором в кварцевую трубу, выход которой можно считать условным соплом реактивного двигателя. Где-то на середине трубы к ней приставлена сужающаяся (для увеличения напряжённости магнитного поля) горловина волновода. На другом конце волновода закреплён магнетрон мощностью 1 кВт с рабочей частотой 2,45 ГГц.
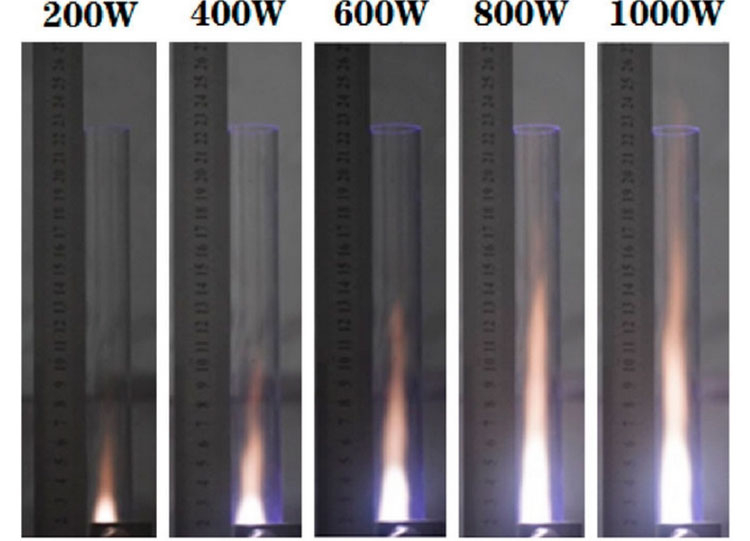
Зависимость длины плазменного факела от подаваемой на магнетрон мощности (линейная регулировка тяги)
Во время запуска двигателя на идущий под давлением в трубе воздух производится почти точечный микроволновый удар и дальнейшее воздействие. Сила микроволнового излучения такова, что происходит сильнейшая ионизация потока воздуха. Возникает факел из плазмы, который вырывается из трубки и создаёт тяговое давление. Интересно отметить, как китайцы измеряли давление плазменного факела. Для этого они положили на отверстие выхлопа полый стальной шар и заполняли его металлическими шариками для подбора точного веса. Данные измерений не самые точные, но примерно дают представление о возможностях двигательной установки.
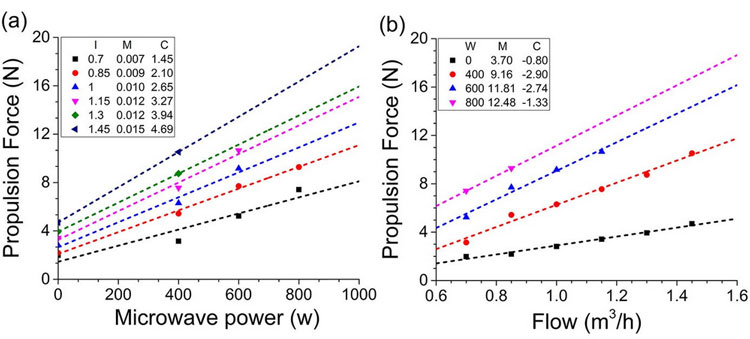
Графики измерений (обратите внимание на отсутствие результатов на максимальных режимах)
Согласно измерениям и аппроксимации, удельная тяга лабораторного прототипа воздушно-реактивного микроволнового плазменного двигателя составила 28 Н/кВт. Это примерно столько же, сколько у современных керосиновых авиационных двигателей авиалайнеров. Если взять батарею электромобиля Tesla Model S мощностью 310 кВт, то тяга гипотетического плазменного двигателя может достигать 8500 Н. Для сравнения, винтовой электросамолёт Airbus E-Fan использует два электропривода мощностью 30 кВт, которые в совокупности производят 1500 Н тяги. Нетрудно посчитать, что эффективность электросамолёта Airbus E-Fan составляет 25 Н/кВт, что ниже, чем у китайской разработки.
Очевидно, учёным ещё предстоит усовершенствовать прототип воздушно-реактивного двигателя. Впрочем, данное исследование оставляет вопросы. Например, на показанном учёными графике линейной зависимости тяги от мощности микроволнового излучения и давления подаваемого воздуха нет показателей для крайних значений (статья). Учёным есть что скрывать? Но сама идея выглядит заманчивой, этого не отнять.

