Естественные и искусственные эл
Естественные и искусственные эл. механические и механические характеристики двигателя независимого возбуждения в именованных и относительных единицах
Обычно двигатель с независимым возбуждением работает при Ф=const. После преобразований математическое описание процессов в ДНВ можно представить в виде следующего ур-я механической характеристики.  .
.
Подставив сюда значение  , получим уравнение электромеханической характеристики.
, получим уравнение электромеханической характеристики.  .
.
В установившимся режиме  .
.
Поэтому уравнение статических характеристик имеют вид:


При Uя=const и ф=const они представляют прямые, отсекающие на оси ординат величину  , соответствующую скорости идеального холостого хода.
, соответствующую скорости идеального холостого хода.
Характеристика двигателя, соответствующие отсутствию в якорной цепи добавочного сопротивления при Uя =const и ф=const, являются естественными. Наклон их определяется только величинами  .
.
 |
 Модуль статической жесткости механической характеристики можно найти из уравнения момента, взяв производную по скорости
Модуль статической жесткости механической характеристики можно найти из уравнения момента, взяв производную по скорости

Используя понятие жесткости, уравнения статических механической и электромеханической характеристик можно представить в следующих видах:
 ;
; 
 ;
; 
Чем выше модуль b статической естественной характеристики, тем стабильней wпри широких пределах изменения нагрузки. Другой оценкой стабильности рабочей w является статизм механической характеристики, количественной оценкой которой является номинальный перепад скорости.  .
.
Относительный перепад скорости на естественной характеристике:
Для двигателей средней и большой мощности составляет (1,5¸3)%.
Выше написанные уравнения достаточно точно описывают статические характеристики ДНВ, имеющих компенсационную обмотку (КО).Двигатели малой мощности и значительная часть двигателей средней мощности ( Rд2>Rд1. В частном случае при U=0 когда якорь замкнут на некоторое сопротивление, все характеристики пересекаются в начале координат (см. рис.). Из графиков
 |
видно, что увеличение сопротивления якорной цепи вызывает уменьшение скорости двигателя. Это объясняется тем, что при этом увеличивается падение напряжения на якоре и при каждом
 |
данном моменте сопротивления уменьшается ток, а следовательно и момент двигателя.
При изменении напряжения, подводимого к якорю двигателя, изменяется w0. Жесткость характеристик остается неизменной. Семейство механических характеристик, соответствующих различным напряжениям на зажимах двигателя изображено на рис. Отсюда видна возможность регулирования скорости двигателя изменением подводимого напряжения. Но для этого необходимо питать двигатель от источника регулируемого напряжения
 Для обеспечения оптимальных условий работы некоторых производственных механизмов в соответствие с требованиями технологического процесса иногда возникает необходимость повышения рабочей скорости сверх основной. При U=const этого можно достичь путем ослабления магнитного потока двигателя. Его ослабление вызывает увеличение w0, т. к.
Для обеспечения оптимальных условий работы некоторых производственных механизмов в соответствие с требованиями технологического процесса иногда возникает необходимость повышения рабочей скорости сверх основной. При U=const этого можно достичь путем ослабления магнитного потока двигателя. Его ослабление вызывает увеличение w0, т. к.  , но одновременно уменьшается жесткость характеристик
, но одновременно уменьшается жесткость характеристик  . В результате меньшей жесткости характеристик будет иметь место и большее падение скорости при одном и том же значении Мс.
. В результате меньшей жесткости характеристик будет иметь место и большее падение скорости при одном и том же значении Мс.
Если новое, уменьшенное значение потока, равно  , где a
, где a
- Реверсирование двигателя независимого возбуждения и механические характеристики для прямого и обратного напрявления вращения
- Электромеханические свойства двигателей. Математическое описание процессов преобразования энергии в двигателе постоянного тока независимого возбуждения
- Рекомендации по выбору бизнеса
- Строительное оборудование МСД
- Тепловые насосы
Теория электропривода
Частотно регулируемый электропривод
Производим и продаем частотные преобразователи: Цены на преобразователи частоты(21.01.16г.): Частотники одна фаза в три: Модель Мощность Цена CFM110 0.25кВт 2300грн CFM110 0.37кВт 2400грн CFM110 0.55кВт 2500грн CFM210 1,0 кВт 3200грн …
Переходные процессы при пуске и торможении электропривода с короткозамкнутым Асинхронным двигателем (АД)
В большинстве случаев к. з. АД питается от сети с U1=const и f1=const. Поэтому нелинейность их механических характеристик проявляется полностью как в режимах пуска, так и торможения. Магнитный поток в …
Переходный процесс электропривода с двигателем независимого возбуждения при изменении магнитного потока
Обычно ДНВ работает при Ф=Фн если U=const или U=var. Необходимость ослабления потока возникает когда требуется получить скорость, превышающую основную (согласно требованиям технологического процесса ). Если бы поток изменялся мгновенно, то …
Продажа шагающий экскаватор 20/90
Цена договорная
Используются в горнодобывающей промышленности при добыче полезных ископаемых (уголь, сланцы, руды черных и
цветных металлов, золото, сырье для химической промышленности, огнеупоров и др.) открытым способом. Их назначение – вскрышные работы с укладкой породы в выработанное пространство или на борт карьера. Экскаваторы способны
перемещать горную массу на большие расстояния. При разработке пород повышенной прочности требуется частичное или
сплошное рыхление взрыванием.
Вместимость ковша, м3 20
Длина стрелы, м 90
Угол наклона стрелы, град 32
Концевая нагрузка (max.) тс 63
Продолжительность рабочего цикла (грунт первой категории), с 60
Высота выгрузки, м 38,5
Глубина копания, м 42,5
Радиус выгрузки, м 83
Просвет под задней частью платформы, м 1,61
Диаметр опорной базы, м 14,5
Удельное давление на грунт при работе и передвижении, МПа 0,105/0,24
Размеры башмака (длина и ширина), м 13 х 2,5
Рабочая масса, т 1690
Мощность механизма подъема, кВт 2х1120
Мощность механизма поворота, кВт 4х250
Мощность механизма тяги, кВт 2х1120
Мощность механизма хода, кВт 2х400
Мощность сетевого двигателя, кВ 2х1600
Напряжение питающей сети, кВ 6
Более детальную информацию можете получить по телефону (063)0416788
Двигатель постоянного тока независимого возбуждения (ДПТ НВ)

Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое.
Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид

где: n — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).

Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными рисунок 13.13, а (график 1 Rдоб = 0 ).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными .
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:

где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.


На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман М.М. Справочник по электрическим машинам
Иcследование механических характеристик электродвигателя постоянного тока с независимым возбуждением

Министерство образования Российской Федерации
НИЖЕГОРОДСКИЙ ГОСУДАРСТВЕННЫЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра “Электропривод и автоматизация
промышленных установок”
Иcследование механических характеристик электродвигателя постоянного тока с независимым возбуждением
Методические указания к лабораторной работе №1
для студентов направления 551300 всех форм обучения
Исследование механических характеристик электродвигателя постоянного тока с независимым возбуждением: Лаб. Работа №1 по курсу «Основы электропривода» для студентов направления 551300 всех форм обучения/НГТУ; Сост.:
Изложены электромеханические свойства двигателя постоянного тока с независимым возбуждением в двигательном и тормозном режимах и порядок проведения лабораторной работы.
Подп. к печати 29.03.05. Формат 60х84 1/16. Бумага газетная. Печать офсетная.
Печ. л. 0,75. Уч.-изд. л. 0,6. Тираж 300 экз. Заказ 145
 |
Нижегородский государственный технический университет.
Типография НГТУ. Нижний Новгород, ул. Минина, 24
У Нижегородский государственный
технический университет, 2005
Целью работы является исследование механических характеристик двигателя постоянного тока с независимым возбуждением в двигательном и тормозных режимах.
Основные сведения
Под механической характеристикой электродвигателя постоянного тока с независимым возбуждением понимается зависимость угловой скорости вращения его вала от электромагнитного момента, т. е. w = f(М).
Механические характеристики подразделяются на естественные и искусственные.
Естественной механической характеристикой называют характеристику электродвигателя, полученную при номинальном напряжении на его зажимах, нормальной схеме включения обмоток и отсутствии внешних резисторов в их цепях.
Искусственной механической характеристикой называют характеристику, полученную при условии питания двигателя от сети с напряжением, отличным от номинального, или же при включении в цепь его якоря или в цепь обмотки возбуждения внешних резисторов, а также в случае включения электродвигателя по специальной схеме.
Механические характеристики электродвигателя характеризуются относительным изменением его скорости при изменении момента нагрузки.
 ,
,
где w0 — угловая скорость при идеальном холостом ходе;
w — угловая скорость при заданной нагрузке.
Механические характеристики в двигательном режиме
Аналитическое выражение механической характеристики электродвигателя с независимым возбуждением w = f(М) можно получить из совместного решения уравнения электрического равновесия напряжения на зажимах якоря, а также уравнений вращающего момента и противо-ЭДС электродвигателя:
U=E+IR (1) ; M=КФI (2); E=KФw (3),
где U – напряжение, приложенное к зажимам якоря;
Е – противо-ЭДС электродвигателя;
K – коэффициент, зависящий от конструктивных данных электродвигателя;
w – угловая скорость двигателя;
М — электромагнитный момент, развиваемый двигателем;
Ф — магнитный поток;
I — ток якоря;
R — суммарное сопротивление якорной цепи.
Уравнение механической характеристики электродвигателя постоянного тока с независимым возбуждением получим после совместного решения уравнений (1) ¸ (3):
 , (4)
, (4)
или  , (5)
, (5)
где С=KФ. (6)
Числовое значение С может быть определено из уравнения (1), записанного для номинального режима работы:
 , (7)
, (7)
где UH, IH, wH — номинальные значения напряжения, тока и сопротивления якоря и угловой скорости электродвигателя.

Анализ уравнения (4) показывает: во-первых, механическая характеристика электродвигателя постоянного тока с независимым возбуждением является линейной характеристикой; во-вторых, с уменьшением момента на валу электродвигателя до нуля его угловая скорость стремится к скорости идеального холостого хода; в-третьих, с увеличением сопротивления резистора в цепи якоря жесткость механических характеристик уменьшается (рис.1); в-четвертых, с ослаблением магнитного потока электродвигателя, что достигается уменьшением тока возбуждения, скорость его идеального холостого хода возрастает и полученная при этом механическая характеристика обладает меньшей жесткостью по сравнению с естественной характеристикой (рис.2).
Механические характеристики в тормозных режимах
Для двигателя постоянного тока с независимым возбуждением возможны следующие тормозные режимы работы:
1) электродинамическое торможение;
2) торможение противовключением;
3) генераторное торможение с отдачей энергии в сеть (рекуперативное торможение).
Режим электродинамического торможения
Режимом электродинамического торможения называют такой режим работы электродвигателя, при котором его якорь отключается от питающей сети и замыкается на внешний резистор RT, а обмотка возбуждения остается подключенной к сети. В этом режиме двигатель работает в режиме генератора с независимым возбуждением (рис.3), преобразуя кинетическую энергию движущихся инерционных масс привода в электрическую, которая расходуется на нагрев резисторов в якорной цепи.
Уравнение механической характеристики в режиме динамического торможения можно получить из (4), полагая в нем напряжение сети равным нулю, U=0 :
 , (8)
, (8)
где R=RЯ+RT.
Из уравнения (8) видно, что механические характеристики в режиме динамического торможения расположены во втором квадранте и представляют прямые линии, проходящие через начало координат.


Тормозной момент возрастает с уменьшением сопротивления тормозного резистора и наоборот (рис.4). Наибольшего тормозного эффекта можно достигнуть при замыкании якоря двигателя накоротко. По условиям ограничения тормозного тока замыкание якоря накоротко применяется только для двигателей малой мощности, обладающих сравнительно большим сопротивлением якоря, а также для всех остальных электродвигателей при торможении на малых скоростях.
Электродинамическое торможение может быть использовано при тормозном спуске груза. В этом случае установившийся режим спуска будет иметь место при скорости, определяемой точкой А (рис.4).
Режим торможения противовключением
Режимом торможения противовключением называется такой режим работы, когда при вращении электродвигателя под действием инерционных масс привода в электродвигатель из сети поступает ток такого направления, которое соответствует вращению его в противоположную сторону.
Переход из двигательного режима в режим торможения противовключением можно осуществить изменением полярности напряжения на зажимах якоря.
При изменении полярности напряжения (рис.5) необходимо в цепь якоря двигателя ввести внешний тормозной резистор, с тем чтобы ток в нем, обусловленный суммой напряжения в сети и ЭДС электродвигателя, не превысил допустимого значения.
Уравнение механической характеристики для данного режима получается из (4) при смене знака перед напряжением:
 . (9)
. (9)
Анализ уравнения (9) показывает, что механические характеристики в режиме торможения противовключением линейны и расположены во втором квадранте (рис.6). С уменьшением сопротивления тормозного резистора тормозной момент возрастает и наоборот.


Режим торможения противовключением может быть получен без изменения полярности напряжения на якоре двигателя при наличии активного статического момента на его валу за счет введения в цепь якоря резистора RT с достаточно большим сопротивлением. Точка установившегося режима при этом находится в четвертом квадранте (точка А, рис.6) и привод работает в режиме тормозного спуска.
Режим рекуперативного торможения
Режимом рекуперативного торможения называют такой режим, когда электродвигатель при определенных режимах работы привода, в силу своей обратимости, становится генератором, преобразуя кинетическую энергию движущихся масс механизма в электрическую с отдачей ее в питающую сеть.
Переход электродвигателя в генераторный режим с отдачей энергии в сеть возможен при скорости привода, превышающей скорость соответствующего идеального холостого хода. При этом ЭДС двигателя, направленная встречно с напряжением сети, становится больше его и ток в якоре электродвигателя меняет направление на обратное. Практически режим рекуперативного торможения может быть осуществлен:
1) при наличии отрицательного статического момента нагрузки, когда электродвигатель под его действием в сторону вращения, получив ускорение, достигает скорости, превышающей скорость идеального холостого хода (рис.7);
2) при переходе электродвигателя с большей скорости, полученной ослаблением потока двигателя, на меньшую за счет резкого увеличения магнитного потока (участок w2 – w0 характеристики 1 на рис.8).
Уравнение механической характеристики для данного режима можно получить из (4), полагая в нем М = —МТ :
 . (10)
. (10)
Из уравнения (10) следует, что механические характеристики в данном режиме при различных сопротивлениях резисторов в якорной цепи электродвигателя являются продолжением характеристик двигательного режима в области второго квадранта (рис.7). С увеличением скорости w при неизменном R величина тормозного момента возрастает. Увеличение сопротивления внешнего резистора в цепи якоря при неизменном отрицательном статическом моменте на валу электродвигателя приводит к увеличению скорости вращения привода.

Переход из двигательного режима в режим рекуперации при резком увеличении потока возбуждения двигателя приведен на рис.8.
Программа работы
1. Ознакомиться с электрооборудованием установки (см. рис. 9).
2. Рассчитать величины сопротивлений тормозных резисторов для режимов динамического торможения и торможения противовключением при I/IH=2 и I/IH=2,5.
3. Снять и построить механические характеристики электродвигателя постоянного тока с независимым возбуждением:
б) искусственные при добавочных резисторах в цепи якоря электродвигателя сопротивлением R1=5 Ом и R2=10 Ом;
в) искусственные при токах возбуждения IВ=0,9IВH и IВ=0,7IВH;
4. Снять характеристики электродвигателя:
а) для режима динамического торможения и торможения противовключением при сопротивлениях тормозных резисторов, рассчитанных в п.2;
б) для режима рекуперативного торможения при добавочных резисторах в цепи якоря электродвигателя сопротивлением R1=0 и R2=5 Ом.
5. По характеристикам w = f(t) и IЯ = f(t) рассчитать и построить механические характеристики w(М) для всех тормозных режимов.
6. По аналитическим формулам рассчитать и построить естественную и искусственную механические характеристики w = f(М) при U=UH и RЯ=5 Ом.
Статическая и динамическая характеристики двигателя постоянного тока независимого возбуждения
Статическая электромеханическая характеристика описывает процесс пуска двигателя только при очень медленном изменении скорости, например при большом моменте инерции электропривода. В действительности процесс изменения скорости при пуске двигателя происходит по другой траектории, называемой динамической электромеханической характеристикой двигателя. Примерный вид динамической механической… Читать ещё >
- электрический привод
- Выдержка
- Похожие работы
- Помощь в написании
Статическая и динамическая характеристики двигателя постоянного тока независимого возбуждения ( реферат , курсовая , диплом , контрольная )
Уравнения (3.3) и (3.5) называют статическими электромеханической и механической характеристиками двигателя постоянного тока, так как они описывают электропривод в статике, то есть значения координат двигателя получаются в установившемся режиме работы.
Как следует из графика электромеханической характеристики, построенной при напряжении якоря  , при пуске двигателя из неподвижного состояния ток двигателя будет постепенно уменьшаться от пускового значения
, при пуске двигателя из неподвижного состояния ток двигателя будет постепенно уменьшаться от пускового значения  до тех пор, пока он не сравняется со статическим током
до тех пор, пока он не сравняется со статическим током  , соответствующим моменту сопротивления
, соответствующим моменту сопротивления  на валу двигателя. Установившемуся режиму работы двигателя будет соответствовать скорость
на валу двигателя. Установившемуся режиму работы двигателя будет соответствовать скорость  .
.
Статическая электромеханическая характеристика описывает процесс пуска двигателя только при очень медленном изменении скорости, например при большом моменте инерции электропривода. В действительности процесс изменения скорости при пуске двигателя происходит по другой траектории, называемой динамической электромеханической характеристикой двигателя. Примерный вид динамической механической характеристики двигателя при пуске приведен на рис. 3.4, кривая 2 [18, «https://westud.ru»].
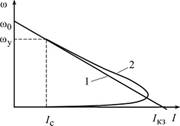
Рис. 3.4. Электромеханическая характеристика двигателя постоянного тока независимого возбуждения: 1 — статическая: 2 — динамическая.
Динамической электромеханической характеристикой электропривода называется зависимость между мгновенными значениями скорости и тока для одного и того же момента времени переходного режима работы электропривода.
График динамической электромеханической характеристики двигателя постоянного тока независимого возбуждения можно получить из совместного решения следующей системы уравнений:

 (3.12).
(3.12).
где i — мгновенное значение тока якоря двигателя, А;  — коэффициент ЭДС и электромагнитного момента при номинальном потоке возбуждения двигателя;
— коэффициент ЭДС и электромагнитного момента при номинальном потоке возбуждения двигателя;  — индуктивность обмотки якоря двигателя, Гн.
— индуктивность обмотки якоря двигателя, Гн.