
График рабочих характеристик асинхронного двигателя
22. Рабочие характеристики асинхронной машины
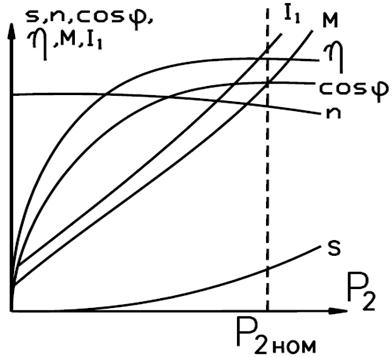
 Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 — s).
Скольжение s = Pэ2/Pэм, т. е. скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1.
По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 — 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2′ возрастают электрические потери в роторе.
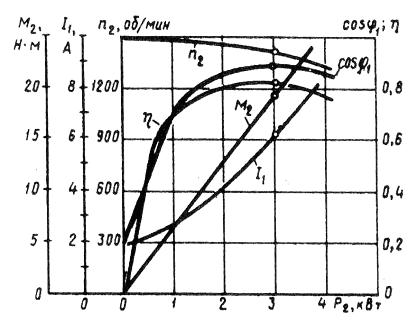
Рис. 1. Рабочие характеристики асинхронного двигателя двигателя
Зависимость М2 =f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2,
где Р2 — полезная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 =f (P2) имеет криволинейный вид.
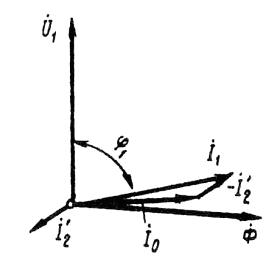
Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90° (рис. 2).
Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 — 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе.
В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.
На рис. 3 представлены графики зависимости cos φ1, асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).
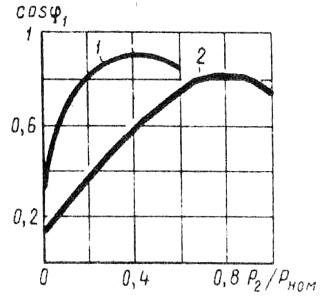
Рис. 3. Зависимость cos φ1,от нагрузки при соединении обмотки статора двигателя звездой (1) и треугольником (2)
Друзья! Приглашаем вас к обсуждению. Если у вас есть своё мнение, напишите нам в комментарии.
Аналитический метод расчета рабочих характеристик асинхронных двигателей. График рабочих характеристик асинхронного двигателя
Аналитический метод расчета рабочих характеристик асинхронных двигателей
Рассмотренный графический метод расчета рабочих характеристик асинхронных двигателей с применением круговой диаграммы имеет существенный недостаток — необходимость построения этой диаграммы и неизбежную неточность как при построении, так и при ее последующем использовании, связанные с дополнительными построениями, измерениями отрезков и т. п. Аналитический метод расчета рабочих характеристик не предусматривает каких-либо графических изображений и измерений, а некоторое увеличение объема математических вычислений при условии применения простейшей вычислительной техники не вызывает каких-либо затруднений. Аналитический метод расчета основан на схеме замещения асинхронного двигателя (рис. 12.2, б). Исходными при этом являются паспортные данные двигателя (Рном, U1HOM, n2ном) и результаты выполнения опытов холостого хода и короткого замыкания (см. § 14.2 и 14.3).
Расчет ведут в следующем порядке.
Определяют приведенное активное сопротивление ротора (Ом):
r2′ = rк – r1, (14.30)
а затем критическое скольжение:
sкр ≈ r2’/ xк (14.31)
и номинальное скольжение:
sном = (n1 — n2ном)/n1 (14.32)
Задавшись рядом значений скольжения (всего 6—7 значений, в том числе номинальное shom и критическое sкр), определяют необходимые для построения рабочих характеристик величины.
Эквивалентное активное сопротивление (Ом)
rэк = r1 +r2’/ s. (14.33)
Эквивалентное полное сопротивление рабочего контура схемы замещения (Ом)
Zэк =  (14-34)
(14-34)
Коэффициент мощности рабочего контура схемы замещения
cos φ2 = rэк / zэк. (14.35)
Приведенный ток ротора, (А)
I/2 = U1 /zэк (14.36)
и его активная и реактивная составляющие (А)
I/2a = I/2 соs φ2; (14.37) I/2p = I/2 sin φ2. (14.38)
Активная и реактивная составляющие тока статора (А)
I1а = I0а + I/2а; (14-39)
I1p = I0p + I2p (14-40)
Здесь I0а = I0 соs φ0 — активная составляющая тока холостого хода; I0p = I0 sin φ0 — реактивная составляющая этого тока.
Ток в обмотке статора (А)
I1 =  (14.41)
(14.41)
Коэффициент мощности двигателя
cos φ1 = I1a/ I1 (14.42)
Потребляемая двигателем мощность (Вт)
P1 = m1U1I1a (14.43)
Электрические потери статора Рэ1 определяют по (13.2), электромагнитную мощность Рэм — по (13.6), электромагнитный момент М — по (13.11), электрические потери в роторе Рэ2 — по (13.5), добавочные потери Рдоб — по (13.7) и (13.8).
Полезная мощность двигателя (Вт)
Р2 = Рэм – Рэ2 – Рмех – Рдоб, (14.44)
где Рмех — механические потери, Вт; их определяют из опыта холостого хода (см. рис. 14.2).
Коэффициент полезного действия двигателя определяют по (13.10), частоту вращения ротора — по (10.2). Полезный момент (момент на валу) двигателя (Н  м)
м)
М2 = 9,55Р2/ n2. (14.45)
Результаты расчета сводят в таблицу (см. табл. 14.1), а затем строят рабочие характеристики двигателя (см. рис. 13.7).
Пример 14.1.Трехфазный асинхронный двигатель имеет паспортные данные: Рном =3,0 кВт, Uном = 220/380 В, I1ном = 6,3 А, nном = 1430 об/мин. Активное сопротивление фазы обмотки статора при рабочей температуре r1 = 1,70 Ом. Характеристики х.х. двигателя приведены на рис. 14.2 (I0ном = 1,83 А, Рном= 300 Вт, Р/0ном= 283 Вт, Рмех = 200 Вт, соs φ0ном = 0,24, обмотка статора соединена звездой). Характеристики к.з. приведены на рис. 14.3 (Рк.ном = 418 Вт, Uк.ном = 59,5 В, Iк.ном = 6,3 А, cos φк.ном =0,372).
Требуется рассчитать данные и построить рабочие характеристики двигателя и определить перегрузочную его способность.
Решение. Активная и реактивная составляющие тока х.х.
I0a = I0 cos φ0ном = 1,83 • 0,24 = 0,44 А,
I0p = I0 sin φ0ном = 1,83 • 0,97 = 1,77 А.
Полное сопротивление кз. по (14.10)
zк = Uк.ном/ Iк.ном = 59,5/6,3 = 9,45 Ом,
его активная и реактивная составляющие по (14.11) и (14.12)
rк = zк соs φк.ном = 9,45 • 0,372 = 3,5 Ом,
xк =  =
=  =8,8 Ом.
=8,8 Ом.
Приведенное активное сопротивление ротора по (14.30)
r/2 = rк – r1 = 3,5 — 1,7 = 1,8 Ом.
Критическое скольжение по (14.31)
sкр = r/2/ xк = 1,8/ 8,8 = 0,20.
Номинальное скольжение по (14.32)
sном = (n1 — n2ном)/ n1 = (1500 — 1430)/ 1500 = 0,046.
Магнитные потери по (14.8)
Рм = Р/0 — Рмех = 283 — 200 = 83 Вт.
Задаемся следующими значениями скольжения: 0,01, 0,02, 0,03, 0,046, 0,06 и 0,20. Результаты расчета приведены в табл. 14.1. Рабочие характеристики двигателя представлены на рис. 13.7.
Перегрузочная способность двигателя λ = Мmax/ Mном = 38,7/ 21,4 = 1,81.
1.Какие существуют методы получения данных для построения рабочих характеристик асинхронных двигателей?
2.Чем ограничивается применение метода непосредственной нагрузки?
3.Как определить величину механических и магнитных потерь двигателя по характеристикам х.х.?
• Пуск и регулирование частоты вращения трехфазных асинхронных двигателей
Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
Объяснить особенности рабочих характеристик асинхронного двигателя.
Ответ12: Рабочие характеристик асинхронного двигателя это зависимости n, M, сosφ, I1, P1 , КПД-η от полезной мощности на валу Р2. представлены на рис 6-12.
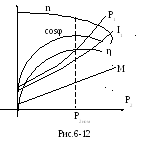
а) Зависимость η=f(P2)
КПД двигателя η= P2/ P1= P2/ ΔР+ P2
P 1 –мощность электрической энергии, поступившая из сети в двигатель,
1 –мощность электрической энергии, поступившая из сети в двигатель,
P2 –мощность, преобразованная в полезную механическую энергию,
ΔР= мощность всех потерь в двигателе: электрических и магнитных потерь в статоре, электрических потерь в роторе и механических потерь ( трение в подшипниках , трение о воздух) .Потери в обмотках изменяются как I2 . Т.о. по мере роста нагрузки ток двигателя растет, а потери растут быстрее. Поэтому в начале по мере роста нагрузки КПД растет быстро, а затем медленно и достигает максимума при 70-75% нагрузки. При дальнейшем увеличении нагрузки Р2 потери значительно возрастают и КПД уменьшается.
б) Зависимость М=f(P2)
По определению в статическом режиме Мэм=Мнагрузки поэтому М эм= P2/ ω2
где ω2= ω1 ·(1-S) угловая частота вращения ротора.
ω1- угловая частота вращения магнитного поля , S-скольжение.
Поэтому зависимость М=f(P2) линейная.
в) Зависимость сosφ =f(P2)
В АД имеет место два энергетических процесса:
а) Необратимый расход активной энергии Р1 и
б) Обратимый процесс периодического изменения запаса энергии магнитного поля, мерой которой является реактивная мощность Q1,
Соотношение между активной мощностью и реактивной мощностью оценивается коэффициентом мощности двигателя сosφ =Р1/ S, где 
Коэффициент мощности двигателя зависит от нагрузки на его валу. При холостом ходе, энергия расходуется только на покрытие небольших электрических и магнитных потерь в статоре и незначительных механических потерь в подшипниках., Это означает, что активная мощность мала, а реактивная велика., поэтому сosφ мал. Обычно сosφхх =0,08÷0,15. С увеличением нагрузки активная мощность Р1 так же увеличивается , а реактивная Q1 изменяется незначительно. При нагрузке Р2 =Р2ном сosφ достигает максимума сosφmax=0,75÷0,95. При дальнейшем увеличении нагрузки из за увеличения потоков рассевания Q1 растет и сosφ уменьшается.
В виду массового применения АД в производстве, использование их с сosφ Р2крит двигатель останавливается .
д) Зависимость S =f(P2)
З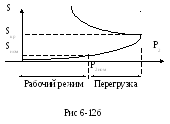 ависимость скольжения S =f(P2) имеет вид (Рис 12б):
ависимость скольжения S =f(P2) имеет вид (Рис 12б):
В режиме холостого хода скольжение
S = 0. С увеличением нагрузки скольжение увеличивается. При нагрузке Р2 =Р2ном скольжение номинальное sном, =1.5÷7%. При дальнейшем увеличении нагрузки P2
(область перегрузки) скольжение быстро возрастает и достигает критического значения Sкр. Дальнейшее увеличение нагрузки приводит к увеличению скольжения и неустойчивому режиму работы двигателя или к его остановке.
е) Зависимость I1=f(P2)
Зависимость тока статора I1 от нагрузки P2 имеет вид (Рис 12а):
Между током статора I1 и током ротора I2 существует трансформаторная связь
Ток статора согласно уравнению для МДЖС имеет вид: I1=I0 + I2
где I10 ток холостого хода. I10 не зависит от нагрузки ,
I2-тока ротора . I2 так же как и в трансформаторах зависит от нагрузки.
Поэтому зависимость I1 увеличивается с увеличением P2 .
В режиме холостого хода I1=I10. и составляет от 20 до 75% от номинального тока статора I1ном.
В момент пуска ток ротора I2 = I2пуск =(6÷8) I1ном.
Расчет и построение рабочих характеристик асинхронного двигателя
3 Расчет и построение рабочих характеристик
Расчет произведем для характеристик асинхронного двигателя при номинальной нагрузке.
3.1 Эквивалентное сопротивление рабочей ветви схемы, Ом:
3.2 Эквивалентное полное сопротивление рабочей ветви схемы, Ом:
Zэк= .
.
Zэк= .
.
3.3 Приведенное значение тока ротора, А:
3.4 Активную Р1 и реактивную Q1 мощности, потребляемые из сети, вычисляем по уравнениям баланса мощностей, составленным по Г-образной схеме замещения при неизменном токе I0ном.
Р1= ;
;
Q1= .
.
Р1= ;
;
Q1= .
.
3.5 Ток статора, А:
I1= .
.
I1= .
.
3.6 Электромагнитная мощность, Вт:
Рэм=3×0,0627×(60,4)2/0,018=38123 Вт=38,123 кВт.
3.7 Вращающий электромагнитный момент, развиваемый двигателем, Н×м:
3.8 Выходная мощность, Вт:
Р2=38123×(1-0,018)-444=36993 Вт=36,993 кВт.
3.9 КПД двигателя:
3.10 Частота вращения ротора, об/мин:
3.11 Момент нагрузки, Н×м:
Таблица III Рабочие характеристики асинхронного двигателя мощностью Рном=37 кВт
Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя представляют собой зависимость скорости вращения n2, коэффициента полезного действия η, коэффициента мощности cosφ, скольжения s, вращающего момента M и тока в цепи статора I1от нагрузки (полезной мощности) на валу двигателя P2 при постоянном номинальном напряжении и неизменной частоте сети (рис. 3.).
Основной характеристикой двигателя является зависимость частоты вращения ротора от момента сопротивления на валу (от нагрузки), т.е. механическая характеристика. Рабочими характеристиками двигателя являются зависимости:
При построении рабочих характеристик используются соотношения:
где: Р2 — полезная механическая мощность на валу;
Р1 — мощность, потребляемая из сети;
I1 — линейный ток, потребляемый двигателем из сети;
М — момент на валу;
Сosj1 — коэффициент мощности двигателя;
h — КПД двигателя;
U1 — линейное напряжение сети.
У асинхронного двигателя, как и у большинства машин, коэффициент полезного действия (КПД) с ростом нагрузки возрастает η=ƒ(Р2), ввиду уменьшения доли электрических и магнитных потерь по отношению к развиваемой мощности двигателя. Однако, при достижении нагрузки 75% от номинальной, заметно возрастают и электрические потери (в обмотках статора и ротора), пропорциональные квадрату тока потребляемого двигателем, что ведет в дальнейшем с увеличением нагрузки к некоторому уменьшению КПД.
Коэффициент мощности cosφ зависит от соотношения между активной мощностью Р1, потребляемой двигателем, и полной мощностью S, складывающейся из активной Р1 и реактивной Q составляющих:
cosφ =  (6)
(6)
При увеличении нагрузки растет величина активной мощности Р1, что приводит к росту cosφ, достигающего максимального значения (0,7-0,9) при номинальной нагрузке на двигатель. В дальнейшем возможно уменьшение cosφ, в связи с увеличением реактивной мощности, связанной с усилением потоков рассеяния.
Механическая характеристика и саморегулирование двигателя.
График, связывающий между собой механические величины — скорость и вращающий момент, называется механической характеристикой асинхронного двигателя (рис. 4.) n=ƒ(M). Саморегулирование асинхронного двигателя заключается в следующем. Пусть двигатель работает устойчиво в каком-то режиме, развивая скорость n1 и вращающий момент М1. При равномерном вращении этот момент равен тормозному моменту Мт1, т.е.
Увеличение тормозного момента до Мт2, вызовет уменьшение оборотов машины, так как тормозной момент станет больше вращающего момента.
С уменьшением оборотов увеличивается скольжение, что в свою очередь вызывает возрастание ЭДС и тока в роторе. Благодаря этому увеличивается вращающий момент двигателя.
Этот процесс заканчивается тогда, когда вращающий момент М2, развиваемый двигателем, станет равным Мт2. При этом, устанавливается скорость вращения меньшая, чем n1. Свойство автоматического установления равновесия между тормозным и вращающим моментами называется саморегулированием.
Момент сопротивления (тормозящий момент) на валу двигателя создается генератором постоянного тока (ГПТ).
При питании ОВ генератора от постоянного источника возникает ток возбуждения IВ, создающий основное магнитное поле машины Ф.
Чаще всего используют два способа включения ОВ — к независимому источнику питания (независимое возбуждение) и параллельно цепи якоря генератора (параллельное возбуждение).
Вал якоря ГПТ, будучи соединенным с валом асинхронного двигателя, приводится им во вращение, в результате чего индуцируется в обмотках якоря ЭДС Е, а на выходе генератора появляется напряжение U, питающее нагрузку генератора, ток цепи якоря Iя взаимодействует с магнитным полем возбуждения Ф и создает тормозящий моментМ:
где: СМ — конструктивный коэффициент машины.
Величина тормозящего момента зависит от величины нагрузки генератора и, следовательно, от IЯ и от тока возбуждения IВ, создающего магнитный поток Ф.
Основные характеристики генератора:
а) характеристика холостого хода: Е = f6(IВ);
б) внешняя характеристика: U = f7(I);
где: I — ток в нагрузке генератора.
2. Методика эксперимента.
В соответствии со стандартами на испытание двигателей создать нагрузку на валу можно тарированным двигателем постоянного тока, работающем в режиме генератора. В этом случае полезную мощность P2 можно рассчитать как:
 (8)
(8)
где PЭЛ– электрическая мощность, выделяемая в нагрузке;
ηГ – КПД генератора постоянного тока;
UГ– напряжение на нагрузке генератора;
IГ – ток нагрузки генератора.
Кривая КПД, как функция полезной мощности от коэффициента нагрузки β=PЭЛ/PЭЛ (PЭЛн – номинальное значение электрической мощности), представлена на рис. 5. Возрастание кривой КПД при малых значениях полезной мощности объясняется низкими значениями потерь короткого замыкания. С ростом нагрузки влияние потерь короткого замыкания возрастает (эти потери зависят от квадрата тока нагрузки), и рост КПД замедляется.
После достижения максимального значения КПД уменьшается и становится равным нулю в режиме короткого замыкания. В генераторах постоянного тока максимальное значение КПД достигается, как правило, при β=0.7…0.8.
Максимальное значение коэффициента полезного действия машин постоянного тока мощностью более 10 кВт составляет 0,85…0,96, причём большие значения соответствуют машинам большей мощности. У машин мощностью до 50 Вт он существенно меньше и составляет всего 0,15…0,5.
В первом приближении можно считать, что КПД нагружаемого генератора постоянно и равно 0,7. Такое допущение приведет к значительной ошибке определения полезной мощности на валу только в режимах, близких к режиму холостого хода (расчетное значение P2будет занижено).
С увеличением нагрузки эта ошибка будет уменьшаться.
Исследование режимов работы асинхронного двигателя проводятся на модульном учебном комплексе МУК-ЭП1, который состоит из:
− блока питания двигателя постоянного тока БПП1;
− блока питания асинхронного двигателя БПА1;
− электромашинного агрегата МА1-АП.
В качестве исследуемого асинхронного двигателя с короткозамкнутым ротором использован АИР63А4 (220 В, 0.25 кВт, 1395 об./мин.). Автоматическая коммутация обмоток двигателя и подключение измерительных приборов к нему осуществляется в блоке БПА1.
В качестве нагрузки использован двигатель постоянного тока ПЛ073У3 (220 В, 180 Вт, 1500 об./мин.). Автоматическая коммутация обмоток двигателя и подключение измерительных приборов осуществляется в блоке БПП1.
При работе с комплексом МУК-ЭП1 необходимо соблюдать следующую инструкцию.
мтомд.инфо
Рабочие характеристики асинхронного двигателя
| Раздел: | Электротехника |
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД асинхронного двигателя η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Расчет рабочих характеристик асинхронного двигателя
Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 — s).
Скольжение s = Pэ2/Pэм, то есть скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n2 ≈ n1.
По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 — 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2′ возрастают электрические потери в роторе.
Рабочие характеристики асинхронного двигателя

Зависимость М2 = f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ω2 = 60 P2/(2πn2) = 9,55Р2/n2, где Р2 — полезная мощность, Вт; ω2 = 2πf2/60 — угловая частота вращения ротора.
Из этого выражения следует, что если n2 = const, то график М2 = f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 = f (P2) имеет криволинейный вид.
Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода электродвигателя I при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ), лишь немногим меньше 90°.
Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 — 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе.
В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.

